1.本发明涉及一种训练装置,尤其涉及一种骨科辅助行走训练装置。
背景技术:
2.在我们生活的社会城市中,无时无刻都会发生着车祸和坠楼等危险事故,这些事故的发生通常会伴随着生命的离去和伤病的来临,有些人由于亲身经历了这些事故的发生而导致了腿部落下的残病,他们并没有轻易地放弃生活,而是选择了去乐观面地面对。在医院中,我们经常能够看到护士搀扶着病人进行腿部康复训练,有些病人由于伤势较重,每行走一步都是较为艰难的,这对护士的耐心有着巨大的考验,然而,由于护士会有其他工作要做,所以无法时刻陪在病人身边,因此需要辅助装置来进行辅助病人行走训练。
3.根据专利授权公开号为cn214910083u的一种骨科康复用辅助行走训练器,包括数量为两个的支板,所述支板的底部固定安装有防滑脚,两个所述支板相对的一侧之间固定安装有连接板。该骨科康复用辅助行走训练器,通过抓住防滑套经抓杆将整个行走训练器提起,来进行辅助行走,此方法虽然能够达到辅助行走的目的,但是由于坐垫无法调节高度,有些儿童坐上去会比较麻烦,儿童累了时也不能进行靠背休息,并且需要通过手部抬动防滑脚移动,儿童行走起来会很吃力。
4.根据上述现有技术中所存在的缺点,特此设计出能够克服现有技术缺点的一种能够调节坐垫的高度,儿童能进行靠背休息,能够更好地进行辅助移动的骨科辅助行走训练装置。
技术实现要素:
5.本发明为了克服上述现有技术坐垫无法调节高度,有些儿童坐上去会比较麻烦,儿童累了时也不能进行靠背休息,行走起来会很吃力的缺点,本发明要解决的技术问题是提供一种能够调节坐垫的高度,儿童能进行靠背休息,能够更好地进行辅助移动的骨科辅助行走训练装置。
6.为了解决上述技术问题,本发明提供了这样一种骨科辅助行走训练装置,包括有第一固定杆、第一连杆、第一固定块、坐垫、第二连杆、第一固定板、第三连杆、第二固定板、第四连杆、承托块、移动机构和升降机构,第一固定杆上转动式套设有两根第一连杆,两根第一连杆呈左右对称式设置,两根第一连杆下部之间连接有第一固定块,第一固定块前上部连接有坐垫,第一固定块左右两侧对称式设有第二连杆,第二连杆下部转动式设有第一固定板,第一固定板下部转动式设有第三连杆,第三连杆下部转动式套设有第二固定板,第二固定板下部均转动式设有第四连杆,第四连杆下部转动式设有承托块,两块承托块呈左右对称式设置,第一固定杆上设置有移动机构,移动机构上设置有升降机构。
7.优选地,移动机构包括有第二固定杆、第一连接板、固定架、第三固定板、第一转轴、滚轮和扶手,第一固定杆左右两侧均滑动式贯穿有第二固定杆,第二固定杆前部上侧连接有扶手,第二固定杆下侧连接有第一连接板,第一连接板下侧转动式设有两个固定架,两
个固定架呈前后对称式设置,固定架下侧左右对称式设有两个第三固定板,两个第三固定板之间转动式贯穿有第一转轴,第一转轴上套设有滚轮。
8.优选地,升降机构包括有电动推杆、顶块、第二连接板、接触板、第三连接板、挡板和限位板,两根第二固定杆上后部相向的一侧上均转动式设有第三连接板,两块第三连接板之间连接有挡板,两根第二固定杆上部前侧均连接有能够与第三连接板接触的限位板,第一连接板后部上侧安装有电动推杆,电动推杆伸缩件上与第一固定杆之间连接有顶块,两个顶块之间连接有第二连接板,第二连接板中部上侧连接有能够与挡板接触的接触板。
9.优选地,还包括有制动机构,制动机构包括有第三固定杆、绕线盘、扭簧、第二固定块、绳套、导向板、第一滑动杆、橡胶接触块、第一连接块、第一弹簧和连接绳,固定架上左右对称式设有两块导向板,两块导向板之间滑动式设有第一滑动杆,第一滑动杆中部上侧连接有第一连接块,第一连接块与固定架之间连接有第一弹簧,第一滑动杆下部套设有能够与滚轮接触的橡胶接触块,第二固定杆上部相离的一侧上均连接有第二固定块,第二固定块上贯穿有绳套,第二固定杆前部上侧连接有第三固定杆,第三固定杆上套设有绕线盘,绕线盘与第三固定杆之间连接有扭簧,扭簧绕设在第三固定杆上,绕线盘上绕设有连接绳,连接绳尾端贯穿于绳套并与同侧的第一滑动杆连接。
10.优选地,还包括有转向机构,转向机构包括有转杆、拉杆、第四固定杆和第五连杆,右方第三固定杆中部转动式贯穿有转杆,转杆向下依次转动式贯穿于第二固定杆和第一连接板并与前右方固定架连接,转杆顶部套设有拉杆,前方的两个固定架前侧均连接有第四固定杆,两根第四固定杆上部之间转动式套设有第五连杆。
11.优选地,还包括有防护机构,防护机构包括有第五固定杆、第二滑动杆、挡杆、第三固定块、第二弹簧和接触杆,两根第二固定杆中部相离的一侧上均连接有第五固定杆,第五固定杆下部滑动式设有第二滑动杆,两根第二滑动杆相离的一侧上均连接有第三固定块,第三固定块与第五固定杆之间连接有第二弹簧,两根第二滑动杆相向的一侧上对称式设有挡杆,两块顶块前侧均连接有能够与同侧第二滑动杆接触的接触杆。
12.优选地,还包括有限位机构,限位机构包括有固定框、第二转轴、卷簧、第一绑带、第二连接块、第二绑带和第三连接块,两块第一固定板相离的一侧上和第二固定板相离的一侧上均连接有固定框,固定框左侧均连接有第二绑带,第二绑带尾端连接有第三连接块,固定框内部转动式设有第二转轴,第二转轴与固定框之间连接有两根卷簧,卷簧绕设在第二转轴外侧,第二转轴中部绕设有第一绑带,第一绑带尾端滑动时贯穿于固定框并连接有能够与第三连接块卡接的第二连接块。
13.优选地,第二绑带为弹性材质制成。
14.本发明在克服现有技术缺点的基础上,还能够达到的有益效果有:1、坐垫能够上下移动调节,以此使儿童能够更好地乘坐,通过扶手能够进行支撑,挡板能够使儿童靠背休息,移动时通过滚轮能够更好地进行辅助移动。
15.2、儿童通过旋转绕线盘和拉杆,分别能够使滚轮完成刹车和转向的操作,以此能够使儿童更加地安全。
16.3、在儿童乘坐在坐垫上使,通过两根挡杆将儿童腰部围绕住,以此在儿童训练时能够更加地平衡稳定。
17.4、通过第一绑带和第二绑带将儿童的大腿和小腿分别固定在第一固定板和第二
固定板上,以此能够使儿童能够更好地带动第一固定板和第二固定板上,进而更加顺畅地进行训练。
附图说明
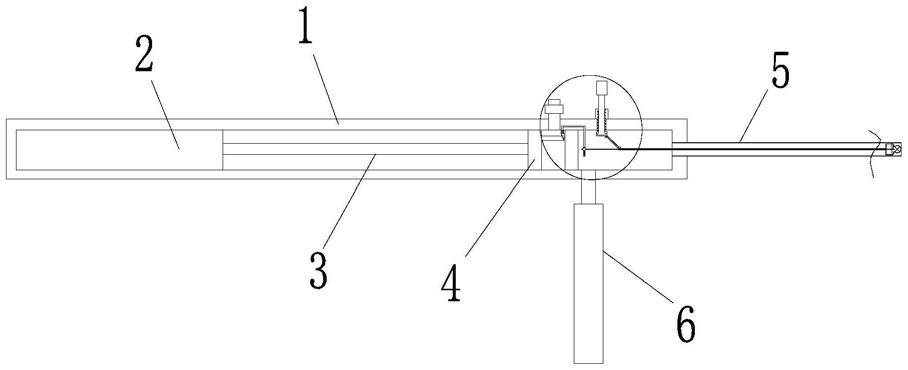
18.图1为本发明的立体结构示意图。
19.图2为本发明的部分立体结构示意图。
20.图3为本发明的a处局部放大立体结构示意图。
21.图4为本发明的b处局部放大立体结构示意图。
22.图5为本发明的移动机构立体结构示意图。
23.图6为本发明的c处局部放大立体结构示意图。
24.图7为本发明的转向机构立体结构示意图。
25.图8为本发明的d处局部放大立体结构示意图。
26.图9为本发明的限位机构立体结构剖视图。
27.图10为本发明升降机构的第一种立体结构示意图。
28.图11为本发明升降机构的第二种立体结构示意图。
29.附图中的标记为:1-第一固定杆,2-第一连杆,3-第一固定块,4-坐垫,5-第二连杆,6-第一固定板,7-第三连杆,8-第二固定板,9-第四连杆,10-承托块,11-移动机构,111-第二固定杆,112-第一连接板,113-固定架,114-第三固定板,115-第一转轴,116-滚轮,117-扶手,12-升降机构,121-电动推杆,122-顶块,123-第二连接板,124-接触板,125-第三连接板,126-挡板,127-限位板,13-制动机构,131-第三固定杆,132-绕线盘,133-扭簧,134-第二固定块,135-绳套,136-导向板,137-第一滑动杆,138-橡胶接触块,139-第一连接块,1310-第一弹簧,1311-连接绳,14-转向机构,141-转杆,142-拉杆,143-第四固定杆,144-第五连杆,15-防护机构,151-第五固定杆,152-第二滑动杆,153-挡杆,154-第三固定块,155-第二弹簧,156-接触杆,16-限位机构,161-固定框,162-第二转轴,163-卷簧,164-第一绑带,165-第二连接块,166-第二绑带,167-第三连接块。
具体实施方式
30.下面结合附图和实施例对本发明作进一步的说明。
31.实施例1一种骨科辅助行走训练装置,如图1、图2、图5、图6、图10和图11所示,包括有第一固定杆1、第一连杆2、第一固定块3、坐垫4、第二连杆5、第一固定板6、第三连杆7、第二固定板8、第四连杆9、承托块10、移动机构11和升降机构12,第一固定杆1上转动式套设有两根第一连杆2,两根第一连杆2呈左右对称式设置,两根第一连杆2下部之间栓接有第一固定块3,第一固定块3前上部栓接有坐垫4,第一固定块3左右两侧对称式设有第二连杆5,第二连杆5下部转动式设有第一固定板6,第一固定板6下部转动式设有第三连杆7,第三连杆7下部转动式套设有第二固定板8,第二固定板8下部均转动式设有第四连杆9,第四连杆9下部转动式设有承托块10,两块承托块10呈左右对称式设置,第一固定杆1上设置有移动机构11,移动机构11上设置有升降机构12。
32.如图5和图6所示,移动机构11包括有第二固定杆111、第一连接板112、固定架113、
第三固定板114、第一转轴115、滚轮116和扶手117,第一固定杆1左右两侧均滑动式贯穿有第二固定杆111,第二固定杆111前部上侧栓接有扶手117,第二固定杆111下侧焊接有第一连接板112,第一连接板112下侧转动式设有两个固定架113,两个固定架113呈前后对称式设置,固定架113下侧左右对称式设有两个第三固定板114,两个第三固定板114之间转动式贯穿有第一转轴115,第一转轴115上套设有滚轮116。
33.如图10和图11所示,升降机构12包括有电动推杆121、顶块122、第二连接板123、接触板124、第三连接板125、挡板126和限位板127,两根第二固定杆111上后部相向的一侧上均转动式设有第三连接板125,两块第三连接板125之间栓接有挡板126,两根第二固定杆111上部前侧均栓接有能够与第三连接板125接触的限位板127,第一连接板112后部上侧安装有电动推杆121,电动推杆121伸缩件上与第一固定杆1之间栓接有顶块122,两个顶块122之间焊接有第二连接板123,第二连接板123中部上侧栓接有能够与挡板126接触的接触板124。
34.起初,接触板124和限位板127卡住挡板126,坐垫4此时处于最高位置,操作人启动电动推杆121收缩,电动推杆121伸缩件通过顶块122带动第一固定杆1和第二连接板123向下移动,第二连接板123会带动接触板124向下移动,接触板124向下移动会松开挡板126,挡板126随之在重力的作用下顺时针旋转倒下,与此同时,第一固定杆1向下移动会通过第一连杆2带动第一固定块3向下移动,第一固定块3带动坐垫4和第二连杆5向下移动,第二连杆5向下移动会带动第一固定板6、第三连杆7、第二固定板8和第四连杆9向下摆动,操作人关闭电动推杆121,此时的装置为收起状态,操作人搀扶儿童乘坐至坐垫4上,使儿童的脚部卡在承托块10上,启动电动推杆121伸长,电动推杆121伸缩件带动第一固定杆1和第二连接板123向上移动,第二连接板123会带动接触板124向上移动,接触板124向上移动会推动挡板126,以此使挡板126逆时针向上旋转立起,通过接触板124和限位板127卡住挡板126,第一固定杆1向上移动会使坐垫4带动儿童向上移动,第二连杆5和第一固定板6逐渐向上立起,以此能够辅助儿童站立,根据儿童的身高,当坐垫4向上移动至合适的位置时,操作人关闭电动推杆121,此时的装置为打开状态,儿童在行走训练时,操作人向前推动挡板126,挡板126通过滚轮116的辅助使该装置向前移动,儿童脚部向前移动会带动承托块10向前移动,操作人转动挡板126,固定架113随之带动滚轮116旋转方向,以此能够进行不同方向的移动,在儿童脚后跟部位向上抬起时,承托块10会以第四连杆9为支点逆时针旋转,在儿童小腿部位向后弯曲时,第二固定板8会以第三连杆7为支点逆时针旋转,以此能够进行辅助儿童行走训练,儿童的手肘部位能够支撑在扶手117上,儿童通过挡板126能够进行靠背休息,当儿童需要从坐垫4上下来时,操作人再次启动电动推杆121收缩,以此能够使坐垫4下降,关闭电动推杆121,操作人再搀扶儿童从坐垫4上移动下来,随后再使坐垫4向上移动复位即可。
35.实施例2在实施例1的基础之上,如图1、图3和图4所示,还包括有制动机构13,制动机构13包括有第三固定杆131、绕线盘132、扭簧133、第二固定块134、绳套135、导向板136、第一滑动杆137、橡胶接触块138、第一连接块139、第一弹簧1310和连接绳1311,固定架113上左右对称式设有两块导向板136,两块导向板136之间滑动式设有第一滑动杆137,第一滑动杆137中部上侧栓接有第一连接块139,第一连接块139与固定架113之间连接有第一弹簧
1310,第一滑动杆137下部套设有能够与滚轮116接触的橡胶接触块138,第二固定杆111上部相离的一侧均栓接有第二固定块134,第二固定块134上贯穿有绳套135,第二固定杆111前部上侧焊接有第三固定杆131,第三固定杆131上套设有绕线盘132,绕线盘132与第三固定杆131之间连接有扭簧133,扭簧133绕设在第三固定杆131上,绕线盘132上绕设有连接绳1311,连接绳1311尾端贯穿于绳套135并与同侧的第一滑动杆137连接。
36.在儿童乘坐在坐垫4上,需要将滚轮116卡住时,儿童旋转绕线盘132,扭簧133形变,使绕线盘132转绕对连接绳1311做收卷动作,连接绳1311会通过绳套135的配合向后拉动第一滑动杆137,第一弹簧1310压缩,第一滑动杆137会带动橡胶接触块138向后移动,橡胶接触块138向后移动会与滚轮116接触,以此增大滚轮116的摩擦力,进而将滚轮116卡住,儿童松开绕线盘132,扭簧133复位,绕线盘132在扭簧133复位的作用下对连接绳1311做放线动作,连接绳1311松开第一滑动杆137,第一弹簧1310复位,第一滑动杆137在第一弹簧1310复位的作用下带动橡胶接触块138脱离滚轮116,以此能够使滚轮116正常滚动。
37.实施例3在实施例2的基础之上,如图1和图7所示,还包括有转向机构14,转向机构14包括有转杆141、拉杆142、第四固定杆143和第五连杆144,右方第三固定杆131中部转动式贯穿有转杆141,转杆141向下依次转动式贯穿于第二固定杆111和第一连接板112并与前右方固定架113连接,转杆141顶部套设有拉杆142,前方的两个固定架113前侧均栓接有第四固定杆143,两根第四固定杆143上部之间转动式套设有第五连杆144。
38.儿童通过拉杆142顺时针转动转杆141,转杆141会带动前右方的固定架113顺时针旋转,前右方的固定架113通过两根第四固定杆143与第五连杆144的连接会带动前左方固定架113顺时针旋转,以此能够使前方的滚轮116进行向左转向操作,儿童通过拉杆142逆时针转动转杆141,前方的滚轮116则向右转向,以此儿童在行走训练时能够快速方便地进行移动转向的操作。
39.实施例4在实施例3的基础之上,如图1、图7和图8所示,还包括有防护机构15,防护机构15包括有第五固定杆151、第二滑动杆152、挡杆153、第三固定块154、第二弹簧155和接触杆156,两根第二固定杆111中部相离的一侧上均焊接有第五固定杆151,第五固定杆151下部滑动式设有第二滑动杆152,两根第二滑动杆152相离的一侧上均栓接有第三固定块154,第三固定块154与第五固定杆151之间连接有第二弹簧155,两根第二滑动杆152相向的一侧上对称式设有挡杆153,两块顶块122前侧均连接有能够与同侧第二滑动杆152接触的接触杆156。
40.起初,接触杆156顶住第二滑动杆152,第二弹簧155处于压缩状态,两块挡杆153相互接触,操作人启动电动推杆121收缩,电动推杆121伸缩杆通过顶块122带动接触杆156向下移动,接触杆156向下移动会松开第二滑动杆152,第二弹簧155复位,第二滑动杆152在第二弹簧155复位的作用下带动挡杆153移动,使两根挡杆153相互远离,关闭电动推杆121,儿童此时能够乘坐在坐垫4上,操作人启动电动推杆121伸长,以此使接触杆156向上移动并推动第二滑动杆152,第二滑动杆152受力带动挡杆153向内侧移动,第二弹簧155压缩,以此使两根挡板126以相互靠近的方向移动并围绕在儿童的腰部,进而使儿童的行走训练更加地稳定,操作人随后启动电动推杆121收缩,两根挡杆153远离,儿童以此便能够从坐垫4上下
来,操作人再启动电动推杆121伸长,两根挡杆153以此复位。
41.实施例5在实施例4的基础之上,如图1和图9所示,还包括有限位机构16,限位机构16包括有固定框161、第二转轴162、卷簧163、第一绑带164、第二连接块165、第二绑带166和第三连接块167,两块第一固定板6相离的一侧上和第二固定板8相离的一侧上均栓接有固定框161,固定框161左侧均连接有第二绑带166,第二绑带166为弹性材质制成,能够方便儿童腿部夹紧,第二绑带166尾端连接有第三连接块167,固定框161内部转动式设有第二转轴162,第二转轴162与固定框161之间连接有两根卷簧163,卷簧163绕设在第二转轴162外侧,第二转轴162中部绕设有第一绑带164,第一绑带164尾端滑动时贯穿于固定框161并栓接有能够与第三连接块167卡接的第二连接块165。
42.操作人通过第二绑带166向下移动带动第三连接块167移动,使第三连接块167脱离第二连接块165,再将儿童脚部卡在承托块10上,腿部贴着第一固定板6和第二固定板8,随后通过第二连接块165拉动第一绑带164围绕于儿童腿部,第二转轴162随之旋转对第一绑带164做放线运动,卷簧163形变,将第二连接块165卡接在第三连接块167上,以此能够通过第一绑带164和第二绑带166将儿童的大腿和小腿分别固定在第一固定板6和第二固定板8上,操作人再次使第三连接块167脱离第二连接块165,松开第一绑带164,卷簧163复位,第二转轴162在卷簧163复位的作用下旋转并将第一绑带164收卷起,以此能够使第一绑带164和第二绑带166松开儿童腿部,操作人再此时使第三连接块167重新卡接回第二连接块165上。
43.以上所述实施例仅表达了本发明的优选实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形、改进及替代,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。