1.本发明涉及传感器技术领域,尤其涉及一种主动伸缩式磁电传感器及其制备方法、磁电传感器阵列。
背景技术:
2.视觉识别为人工智能科学奠定了基础,对各种应用至关重要,包括太空探索、智能汽车、物联网、先进制造等。视觉识别技术主要依靠光学信息采集,以及通过视觉处理算法进一步处理和分析,获取场景的符号描述,从而识别物体或环境。然而,目标物体可能存在于光干扰或黑暗的环境中,例如烟雾、洞穴、泥水或其他严重干扰光学信息收集的环境。在这些情况下,基于视觉策略探索环境或物体识别将是极其困难的。因此,开发一种在非视觉识别环境中识别物体或周围环境的传感器是相当必要的。
技术实现要素:
3.有鉴于此,本发明提出了一种主动伸缩式磁电传感器及其制备方法、磁电传感器阵列,以解决或部分解决现有技术中存在的问题。
4.第一方面,本发明提供了一种主动伸缩式磁电传感器,包括:
5.弹性支撑体,其由弹性材料制成;
6.导电线圈,其嵌设在所述弹性支撑体内;
7.至少一个磁性体,其嵌设在所述弹性支撑体内且与所述导电线圈相对设置。
8.优选的是,所述的主动伸缩式磁电传感器,所述磁性体由磁性粉末与液态硅树脂或液态硅氧烷混合后固化成型得到;
9.所述弹性材料包括液态硅树脂或液态硅氧烷。
10.优选的是,所述的主动伸缩式磁电传感器,所述弹性支撑体包括:
11.第一弹性件,所述磁性体嵌设在所述第一弹性件内,所述第一弹性件外周面呈褶皱状设置;
12.第二弹性件,其端部与所述第一弹性件端部连接,所述导电线圈嵌设在所述第二弹性件内。优选的是,所述的主动伸缩式磁电传感器,所述磁性粉末的磁场强度不小于300毫特斯拉。
13.优选的是,所述的主动伸缩式磁电传感器,所述第一弹性件呈一端开口的褶皱形管状,所述磁性体嵌设在所述第一弹性件封口一侧,所述第二弹性件的一端面与所述第一弹性件设有开口的端面连接,所述导电线圈嵌设在所述第二弹性件与第一弹性件的交界处。
14.优选的是,所述的主动伸缩式磁电传感器,还包括橡胶软管以及位于所述橡胶软管一端的驱动泵,所述橡胶软管另一端与所述第一弹性件的开口连通。
15.第二方面,本发明还提供了一种磁电传感器阵列,包括多个所述的主动伸缩式磁电传感器。
16.第三方面,本发明还提供了一种主动伸缩式磁电传感器的制备方法,包括以下步骤:
17.将磁性粉末和液态硅树脂或液态硅氧烷混合后固化得到磁性体;
18.制备嵌设所述磁性体以及导电线圈的弹性支撑体;
19.对磁性体进行充磁;
20.其中,所述磁性体和导电线圈相对设置。
21.优选的是,所述的主动伸缩式磁电传感器的制备方法,所述磁性粉末为钕铁硼磁性粉末,所述磁性粉末的平均尺寸为5~100μm,所述磁性粉末表面的磁场强度不小于300毫特斯拉;
22.所述磁性粉末与液态硅树脂或液态硅氧烷的质量比为(1~9):1;
23.固化温度为40~100℃、时间为1~5h。
24.优选的是,所述的主动伸缩式磁电传感器的制备方法,所述弹性支撑体包括第一弹性件和第二弹性件,所述磁性体嵌设在所述第一弹性件内,所述导电线圈嵌设在所述第二弹性件内;
25.所述主动伸缩式磁电传感器的制备方法具体包括以下步骤:
26.提供第一模具,所述第一模具上端面开设有至少一个孔洞;
27.将磁性粉末和液态硅树脂或液态硅氧烷混合后,加入至孔洞中,固化得到磁性体;
28.继续向第一模具上端面倾倒液态硅树脂或液态硅氧烷,使其沿着第一模具上端面向下流动,固化后,脱模,即得嵌设有磁性体的第一弹性件;
29.对嵌设有磁性体的第一弹性件进行充磁;
30.提供第二模具,向第二模具内加入液态硅树脂或液态硅氧烷,并在液态硅树脂或液态硅氧烷表面放置导电线圈,固化后,脱模得到嵌设有导电线圈的第二弹性件;
31.将嵌设有导电线圈的第二弹性件与嵌设有磁性体的第一弹性件组装。
32.本发明的一种主动伸缩式磁电传感器及其制备方法、磁电传感器阵列,相对于现有技术具有以下有益效果:
33.1、本发明的主动伸缩式磁电传感器,包括弹性支撑体、导电线圈、至少一个磁性体,弹性支撑体在触碰到障碍物时或受到外界压力是会产生形变,进而使导电线圈、磁性体之间的相对距离产生改变,从而使得通过导电线圈的磁通量发生改变,从而在导电线圈中产生感应电信号,在弹性支撑体伸展的过程中,有无障碍物时所产生的电信号不同,通过对比所产生的电信号,可以判断环境中是否有障碍物;
34.2、本发明的磁电传感器阵列,包括多个呈阵列设置的主动伸缩式磁电传感器,通过磁电传感器阵列多次伸展/收缩检测,可识别出非视觉识别环境(烟雾环境)中障碍物的形状。
附图说明
35.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单的介绍。显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
36.图1为本发明其中一个实施例中主动伸缩式磁电传感器的结构示意图;
37.图2为本发明其中一个实施例中磁电传感器阵列的结构示意图;
38.图3为本发明其中一个实施例中第一模具的结构示意图;
39.图4为本发明其中一个实施例中第二模具的结构示意图;
40.图5为本发明其中一个实施例中第二模具的第一部分结构示意图;
41.图6为本发明其中一个实施例中第二模具的第二部分结构示意图;
42.图7为本发明其中一个实施例中第三模具的结构示意图;
43.图8为本发明实施例1中制备的主动伸缩式磁电传感器遇到或未遇到障碍物时的电压时间曲线图;
44.图9为本发明实施例2中磁电传感器阵列遇到或未遇到障碍物时的电压时间曲线图。
具体实施方式
45.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。
46.因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
47.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
48.在本发明的描述中,需要理解的是,如“上”等指示方位或位置的关系为基于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,或者是本领域技术人员惯常理解的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
49.此外,术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
50.下面将结合本发明实施方式,对本发明实施方式中的技术方案进行清楚、完整的描述,显然,所描述的实施方式仅仅是本发明一部分实施方式,而不是全部的实施方式。基于本发明中的实施方式,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。
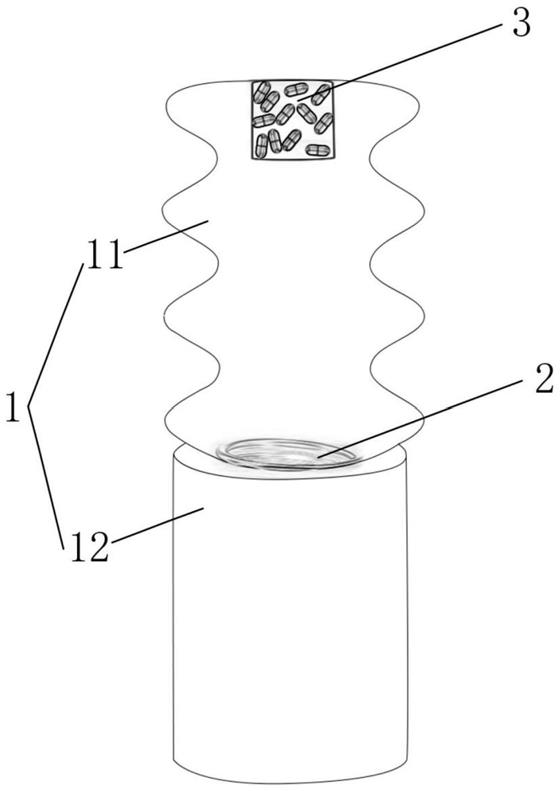
51.本技术实施例提供了一种主动伸缩式磁电传感器,如图1所示,包括:
52.弹性支撑体1,其由弹性材料制成;
53.导电线圈2,其嵌设在弹性支撑体1内;
54.至少一个磁性体3,其嵌设在弹性支撑体1内且与导电线圈2相对设置。需要说明的是,本技术实施例提供的主动伸缩式主动伸缩式磁电传感器,包括弹性支撑体1、导电线圈
2、至少一个磁性体3,磁性体3均嵌设在弹性支撑体1内,导电线圈2、磁性体3呈相对设置,具体的,磁性体3位于导电线圈2上方或正上方或大概正上方位置,弹性支撑体1由弹性材料制成,可以理解的是,弹性支撑体1在触碰到障碍物时或受到外界压力是会产生形变,进而使得导电线圈2、磁性体3之间的相对距离产生改变,从而使得通过导电线圈2的磁通量发生改变,从而在导电线圈2中产生感应电信号,在弹性支撑体1伸缩的过程中,有无障碍物时所产生的电信号不同,通过对比所产生的电信号,可以判断环境中是否有障碍物,进而可以识别出非视觉识别环境(如黑暗、水下、洞穴、烟雾等无光环境)中目标检测物的形状。
55.在一些实施例中,磁性体3由磁性粉末与液态硅树脂或液态硅氧烷混合后固化成型得到。
56.具体而言,弹性支撑体1由液态硅树脂或液态硅氧烷制成。
57.具体的,磁性粉末可以为nd2fe
14
b(钕铁硼)磁性粉末,液态硅树脂可采用液态硅树脂ecoflex(即德国basf公司所制造的脂肪族芳香族无规共聚酯ecoflex),具体型号为ecoflex 00-10、ecoflex 00-20、ecoflex 00-30中的一种,具体根据需求进行选择,这里并不作限定。
58.在一些实施例中,弹性支撑体1包括:
59.第一弹性件11,磁性体3嵌设在第一弹性件11内,第一弹性件11呈褶皱状设置;
60.第二弹性件12,其端部与第一弹性件11端部连接,导电线圈2嵌设在第二弹性件12内。
61.在上述实施例中,弹性支撑体1包括第一弹性件11、第二弹性件12,第一弹性件11外周面呈褶皱形设置,这样便于使得第一弹性件11伸缩。
62.在一些实施例中,磁性粉末表面的磁场强度不小于300毫特斯拉。
63.在一些实施例中,导电线圈2是由金属线绕成的多匝线圈,具体的,由铜线绕成10~1000匝,具体的,可为100匝、200匝、300匝、400匝、500匝、600匝、700匝、800匝、900匝、1000匝等;导电铜线粗细(即导电铜线的横截面直径)为0.1-0.3mm;导电线圈2的内径为5~40mm。
64.在一些实施例中,磁性体3的形状不作限定,例如可为正方体、长方体、圆柱体或不规则形状;磁性体3的高度为1-20毫米,半径为1-20毫米。
65.在一些实施例中,第一弹性件11呈一端开口的褶皱形管状,磁性体嵌设在所述第一弹性件封口一侧,所述第二弹性件的一端面与所述第一弹性件设有开口的端面连接,所述导电线圈嵌设在所述第二弹性件与第一弹性件的交界处。
66.在上述实施例中,第一弹性件11一端面设有开口,开口内壁面呈褶皱状,而磁性体3则设置在开口内,第二弹性件12的一端面与第一弹性件11设有开口的端面连接,导电线圈2嵌设在嵌设在第二弹性件12与第一弹性件11的交界处。
67.在一些实施例中,还包括橡胶软管以及位于橡胶软管一端的驱动泵,橡胶软管另一端与第一弹性件的开口连通。
68.在上述实施例中,驱动泵具体可为注射泵或蠕动泵,液体或空气在驱动泵的作用下,以一定速率进入至第一弹性件的开口内,从而使得第一弹性件11伸展,导致导电线圈2与磁性体3之间的距离发生改变,即通过导电线圈2的磁通量发生改变,从而在导电线圈2中产生感应电信号。具体的,第一弹性体呈褶皱状,以便于在驱动泵的作用下带动内部磁性体
3前后运动。
69.具体的注射泵的注射速度为10~150ml/min,例如可为15ml/min、35ml/min、45ml/min、90ml/min;注射泵的注射体积为1~20ml,例如可为1ml、2ml、3ml、4ml、5ml、6ml等。
70.具体的,实际中,第二弹性件12呈两端开口的中空管状结构,而导电线圈2设置在第二弹性件12上端面开口处,而橡胶软管一端与驱动泵连通、另一端与第二弹性件12的下端开口连通,液体或空气在驱动泵的作用下通过第二弹性件12,进入到第一弹性件内,从而使得第一弹性件11伸展。
71.实际中,为了便于检测导电线圈2中产生感应电信号,可从导电线圈2中引出一对导线,且该导线连接至电压采集系统,以实现电压信号的实时检测。
72.基于同一发明构思,本技术实施例还提供了一种磁电传感器阵列,如图2所示,包括多个上述的主动伸缩式磁电传感器。
73.具体的,磁电传感器阵列可根据使用需求设置不同个数的主动伸缩式磁电传感器,比如可为2
×
2、3
×
3、4
×4…n×
n(n为2~50)阵列设置的主动伸缩式磁电传感器,优选的可为2
×
2阵列设置的主动伸缩式磁电传感器。以2
×
2阵列设置的主动伸缩式磁电传感器阵列为例说明,每个主动伸缩式磁电传感器的导电线圈均引出一对导线,每对导线分别连接至多通道电压采集系统,以实现主动伸缩式磁电传感器电压信号的实时检测。四个主动伸缩式磁电传感器的橡胶软管与一个五通阀门连接,该五通阀门连接至驱动泵,以实现四个主动伸缩式磁电传感器的同步控制。
74.基于同一发明构思,本技术实施例还提供了一种主动伸缩式磁电传感器的制备方法,包括以下步骤:
75.s1、将磁性粉末和液态硅树脂或液态硅氧烷混合后固化得到磁性体;
76.s2、制备嵌设所述磁性体以及导电线圈的弹性支撑体;
77.s3、对磁性体进行充磁;
78.其中,磁性体和导电线圈相对设置。
79.在一些实施例中,磁性粉末为钕铁硼磁性粉末,磁性粉末的平均尺寸为5~100μm,磁性粉末表面的磁场强度不小于300毫特斯拉;
80.磁性粉末与液态硅树脂或液态硅氧烷的质量比为(1~9):1;
81.固化温度为40~100℃、时间为1~5h。
82.具体的,液态硅树脂采用液态硅树脂ecoflex,液态硅氧烷采用液态二甲基硅氧烷,磁性粉末与液态硅树脂或液态硅氧烷的质量比为可为1:1、2:1、3:7、3:1、4:1、5:1、6:1、7:1、8:1、9:1等。
83.在一些实施例中,弹性支撑体包括第一弹性件和第二弹性件,磁性体嵌设在第一弹性件内,导电线圈嵌设在所述第二弹性件内;
84.主动伸缩式磁电传感器的制备方法具体包括以下步骤:
85.提供第一模具,第一模具上端面开设有至少一个孔洞;
86.将磁性粉末和液态硅树脂或液态硅氧烷混合后,加入至孔洞中,固化得到磁性体;
87.继续向第一模具上端面倾倒液态硅树脂或液态硅氧烷,使其沿着第一模具外表面向下流动,固化后,继续倾倒液态硅树脂,持续倾倒-固化的过程1-20次,脱模,即得嵌设有磁性体的第一弹性件;
88.对嵌设有磁性体的第一弹性件进行充磁;
89.提供第二模具,向第二模具内加入液态硅树脂或液态硅氧烷,并在液态硅树脂或液态硅氧烷表面放置导电线圈,固化后,脱模得到嵌设有导电线圈的第二弹性件;
90.将嵌设有导电线圈的第二弹性件与嵌设有磁性体的第一弹性件组装。
91.具体的,第一模具4的结构如图3所示,第一模具4的外周面呈褶皱状、上端面开设有多个孔洞,将磁性粉末和液态硅树脂或液态硅氧烷混合后,加入至孔洞中,固化得到磁性体;继续向第一模具4上端面倾倒液态硅树脂或液态硅氧烷,静置一段时间,使上端面多余的液体流下来,从而形成一层液态硅树脂或态硅氧烷薄膜,40-100℃下固化0.5-5h,继续倾倒液态硅树脂或液态硅氧烷至第一模具4上端面,静置,固化,重复上述倾倒-静置-固化的过程多次(1~20次),脱模后,即得嵌设有磁性体的第一弹性件;显然由于液态硅树脂或液态硅氧烷在第一模具4外周形成第一弹性件,在脱模后,形成一端开口的褶皱状第一弹性体,且磁性体嵌设在第一弹性体的开口内,;具体的,第二模具5的结构如图4所示,具体而言,如图5~6所示,第二模具5包括第一部分51和第二部分52,且第二部分52呈内部中空的圆柱筒状,而第一部分51包括底座以及立柱,立柱可套设在第二部分52内,立柱与第二部分52之间形成间隙,向第二模具5内(即第一部分51的立柱和第二部分52之间的间隙)加入液态硅树脂或液态硅氧烷,并在液态硅树脂或液态硅氧烷表面放置导电线圈,固化后,脱模得到嵌设有导电线圈的第二弹性件。
92.在一些实施例中,向第二模具5内(即第一部分51的立柱和第二部分52之间的间隙)加入液态硅树脂或液态硅氧烷,且不倒满,并留有一定的高度,固化后,将导电线圈放置在该预留的空间内。
93.在一些实施例中,将嵌设有导电线圈的第二弹性件与嵌设有磁性体的第一弹性件组装具体为:将第一弹性件开设开口的端面放置在第二弹性件嵌设有导电线圈的端面,然后在两者连接处注入液态液态硅树脂或液态硅氧烷,固化,即可将第二弹性件与第一弹性件组装。
94.在一些实施例中,充磁具体为:将嵌设有磁性体的第一弹性件固定在充磁机上,在500~2000v的高压下进行竖直充磁,nd2fe
14
b钕铁硼粒子可在1~5s内瞬间磁化至饱和。
95.在一些实施例中,由于第二弹性件采用图4中所用的第二模具5成型得到,则第二弹性件必然呈内部中空的圆柱筒状结构,且导电线圈位于第二弹性件上端面,而第一模具4的端面设有开口,则必然第二弹性件内部与第一模具的开口连通,此时,将一橡胶软管插入至第二弹性件底部的中空位置处,即可实现橡胶软管与第二弹性件内部以及第一弹性件开口部分的连通。显然橡胶软管的外径与第二弹性件的中空部分内径相适配。
96.本技术实施例还提供了一种磁电传感器阵列的制备方法,该磁电传感器阵列包括四个主动伸缩式磁电传感器,具体地,如图7所示,第三模具6,该第三模具6上设有四个卡槽61,且该卡槽61与第二弹性件12相适配,将四个的主动伸缩式磁电传感器固定在该卡槽61内,即可形成包含四个阵列设置的主动伸缩式磁电传感器阵列。
97.上述实施例中,第一模具4、第二模具5和第三模具6均采用3d打印方式进行制备,具体可以采用现有的技术进行实现,3d打印设备的具体型号根据需求进行选择,这里并不作限定;上述模具的原料可以选自聚乳酸、热塑性塑料、陶瓷材料、石蜡粉末材料、金属材料、光敏树脂中的任意一种,可以根据不同的3d打印成型方式使用其中的一种;热塑性塑料
包括丙烯腈-丁二烯-苯乙烯(abs)、聚乙烯(pe)、聚氯乙烯(pvc)、聚丙烯(pp)、聚苯乙烯(ps)、聚碳酸酯(pc)、尼龙、尼龙玻纤、聚氨酯(pu)、聚四氟乙烯(ptfe)、聚对苯二甲酸乙二醇(pet)等。
98.本技术的主动伸缩式磁电传感器的制备方法,所用材料简单、化学性质稳定、成本低廉、对人体无毒无害;制备工艺简单,条件温和,耗能小,依靠3d打印技术来辅助制备传感器,操作简单,时间、经济成本低。
99.以下进一步以具体实施例说明本技术的主动伸缩式磁电传感器的制备方法、磁电传感器阵列。
100.实施例1
101.本技术实施例提供了一种主动伸缩式磁电传感器的制备方法,包括以下步骤:
102.s1、提供如图3所示的第一模具,第一模具外周面呈褶皱形,第一模具上端面开设有多个孔洞;
103.s2、将nd2fe
14
b(钕铁硼)磁性粉末和液态硅树脂ecoflex按照质量比7:3进行混合,搅拌均匀后,注入第一模具上端面开设的孔洞中,于60℃下固化3h,得到磁性体;
104.s3、继续将液态硅树脂ecoflex倾倒在第一模具上端面,使其表面多余的液体流下来,从而形成一层液态硅树脂ecoflex薄膜,于60℃下固化3h,继续倾倒液态硅树脂ecoflex至第一模具上端面,静置,固化,重复上述倾倒-静置-固化的过程多次,脱模后,得到嵌设有磁性体的第一弹性件;
105.s4、将上述得到的嵌设有磁性体的第一弹性件翻转后,固定在充磁机上,在500v的高压下进行竖直充磁至nd2fe
14
b(钕铁硼)磁性粉末磁化至饱和;
106.s5、提供如图4所示的第二模具,向第二模具内注入液态硅树脂ecoflex,且留有一定高度空间以放置导电线圈,于60℃下固化3h,再将导电线圈置于固化后的液态硅树脂ecoflex管道(该管道即为第二弹性件)表面;
107.s6、再将嵌设有磁性体的第一弹性件放置在第二模具上且与液态硅树脂ecoflex管道相贴合,再于第一弹性件与液态硅树脂ecoflex管道接触处注入液态硅树脂ecoflex,继续于60℃下固化3h,脱模,即得主动伸缩式磁电传感器;
108.其中,导电线圈由铜线绕成的700匝线圈,铜线的粗细(即导电铜线的横截面直径)为0.1mm,导电线圈的内径为3mm,nd2fe
14
b(钕铁硼)磁性粉末的磁场强度是400mt(毫特斯拉)。
109.实施例2
110.本技术实施例一种磁电传感器阵列,包括实施例1中四个呈阵列设置(2
×
2阵列)的主动伸缩式磁电传感器,具体的,该磁电传感器阵列包括:第三模具,第三模具上设有四个卡槽,主动伸缩式磁电传感器设在卡槽内,磁电传感器阵列的具体结构参考图2所示。
111.将一根橡胶软管插入至实施例1中制备的主动伸缩式磁电传感器的第二弹性件底部的中空位置处,橡胶软管的一端连接注射泵,通过注射泵的向第二弹性件内注入或抽取水使第一弹性件伸缩,测试该主动伸缩式磁电传感器遇到或未遇到障碍物时的电压时间曲线图,结果如图8所示。其中,注射泵注入或抽取水的速率为120ml/min;具体的,测试时从导电线圈引出一对导线并连接至电压采集系统,以实现电压信号的实时检测。
112.测试实施例2中磁电传感器阵列(每个主动伸缩式磁电传感器的第二弹性件均连
通橡胶软管,且橡胶软管的一端连接注射泵)遇到或未遇到障碍物时的电压时间曲线图,结果如图9所示。
113.图8中可以看出,主动伸缩式磁电传感器遇到或未遇到障碍物时产生的电信号不同,通过对比电信号,可以判断在伸展的过程中有无障碍的存在。
114.从图9中可以看出,由四个主动伸缩式传感器组成的磁电传感器阵列阵列,不同位置的主动伸缩式磁电传感器的接收到的电信号不同,通过主动伸缩式磁电传感器阵列多次伸展/收缩检测,可识别出非视觉识别环境(烟雾环境)中障碍物的形状。
115.上所述仅为本发明的较佳实施方式而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。