1.本发明属于智能网联车辆、自动驾驶技术领域,尤其涉及一种基于道路水层深度估计的驾驶决策的系统。
背景技术:
2.道路积水所产生的水层、水坑被称为马路上的“隐形杀手”,车辆若以较高的车速通过水层时会产生“滑水现象”。即车轮因较高的转速与水层产生极大的作用力,导致车轮无法与地面直接接触,使得车辆无法获得足够的地面制动力,最终极易造成车辆失控的严重后果。因此,驾驶员在驾驶过程中能否对行驶路径上的水层信息获得即时感知,是能否保证本车安全行驶的关键。例如高速道路由于强降雨、道路排水不畅等原因产生一定深度的积水层,由于后车驾驶员未能及时发现道路水层、错误估计水层深度,极易造成后车发生滑水现象,酿成严重的交通事故。
3.除了影响本车驾驶安全性外,本车驶过水层时所产生的水层飞溅会对周边交通参与者产生不同程度的消极影响。例如本车因错误估计前方水层深度,选择以较快速度驶过水层,导致大规模飞溅液体落到侧后方车辆的挡风玻璃上;这将很大程度上影响旁车的操纵控制。因此,前方车辆经过水层时所产生的水层飞溅特征是对前方水层深度、大小范围的直接反映,这对本车的决策控制具有重要的借鉴意义。
4.近年来,随着自动驾驶技术的发展,各类自动驾驶技术如自适应巡航(acc,adaptive cruise control)、车道保持辅助、自动紧急刹车(aeb,autonomous emergency braking)等先进驾驶辅助系统(adas,advanced driving assistance system)被大规模应用于普通车辆上。目前的大部分的adas系统的设计方案中,都是以本车的高精度传感器或通过车联网技术获得他车共享信息来感知本车周围环境,并通过高速运算实现本车的规划决策,以及对转向、制动、驱动等的实时控制,来实现安全行驶。其中,自适应巡航系统(acc)是指使用雷达或者摄像头来探测前方车辆,根据驾驶员对跟车速度和跟车时距的设置,通过控制制动和油门来保持和前方车辆的距离。
5.然而,目前公开的adas的车载传感器中,无论是激光雷达还是高清摄像头,都无法对道路水层深度获得较好的感知,尤其在夜晚降雨条件下,缺乏对水层深度的感知能力。因此,倘若自动驾驶车辆无法获得前方水层深度估计,仅仅基于现有的感知算法来做出决策控制,可能导致严重后果。例如acc系统根据前车车速、本车距前车距离作出制动或者加速的指令,若前车驶过水层后突然加速,而本车由于忽略前方水层深度估计仍作出加速跟车的决策控制,导致本车驶过水层速度过快而发生滑水现象。又比如,在水层较深处激活自动紧急刹车aeb功能,有可能引发制动不足导致的交通事故。
6.综上,目前尚且没有根据前车驶过水层时所产生的液体飞溅,对前方水层深度进行预测估计,并在此基础上对本车进行决策控制修正的相关报道。
技术实现要素:
7.本发明的目的在于针对现有技术的不足,提供一种基于道路水层深度估计的驾驶决策的系统。本发明考虑了前车驶过水层时的驾驶行为、运动状态、水层飞溅特征,并用于本车的决策控制。
8.本发明的目的是通过以下技术方案来实现的:一种基于道路水层深度估计的驾驶决策的系统,包括感知模块、前车实际响应计算模块、前车参数及输入估计模块、水层介质属性判别模块、水层飞溅特征参数识别模块、前方水层判断及水层深度预测模块和本车自动驾驶决策模块等。
9.所述感知模块,获取道路交通信息、本车状态信息、前车状态信息、前方水层飞溅信息。其中,道路交通信息包括路面附着系数、车道宽度、车道数量、道路坡度、车道曲率、车道标志线、障碍物、交通指示牌、交通信号灯状态、行人信息、交通流信息和天气状态;本车状态信息包括本车参数δ、本车相对于地面的车身六自由度运动状态y_ego和操纵输入;前车状态信息包括前车相对于本车的车身六自由度运动状态y_relative、车辆外形参数、车牌信息、刹车指示灯状态、转向指示灯状态、轮胎滚动印记、喇叭警示音、轮胎路面噪声、动力传动系统噪声;前方水层飞溅信息包括飞溅液体颜色、飞溅液体反射率、飞溅液体折射率、液体飞溅轨迹、液体飞溅方向、液体飞溅时间、飞溅液体落地声音。其中,车身六自由度动力学状态包括车辆车身刚体的六个运动自由度的线速度、角速度、线加速度、角加速度、位置及姿态角;操纵输入包括转向、制动、驱动、指示灯和警示喇叭的操作。
10.所述前车实际响应计算模块,基于感知模块输出的本车状态信息及前车状态信息,依据车辆相对运动合成原理,将本车相对于地面的车身六自由度运动状态y_ego、前车相对于本车的车身六自由度运动状态y_relative进行叠加,得到此时在当前路况下前车相对于路面的车身六自由度运动状态y_real。
11.所述前车参数及输入估计模块,包括前车参数估计子模块和前车操纵干扰输入估计子模块。其中,前车参数估计子模块,基于感知模块输出的前车状态信息中的车辆外形参数、车牌信息、轮胎滚动印记、轮胎路面噪声,并结合车辆型别数据库确定前车车辆型别,从而估计前车车辆参数γ。前车操纵干扰输入子模块,基于前车实际响应计算模块输出的前车相对路面的车身六自由度运动状态y_real、前车参数估计子模块输出的前车车辆参数γ,通过车辆动力学模型估计前车输入i,包括操纵输入和干扰输入。
12.所述水层飞溅特征参数识别模块,基于感知模块输出的液体飞溅轨迹、液体飞溅方向和液体飞溅时间,识别前方水层飞溅运动的特征参数α。
13.所述水层介质属性判别模块,基于感知模块输出的飞溅液体颜色、飞溅液体反射率、飞溅液体折射率和飞溅液体落地声音,并利用液体判别方法,识别前方车辆遭遇水层的液体类型,进而得到遭遇水层液体的固有属性β。
14.所述前方水层判断及水层深度预测模块,基于前车实际响应计算模块输出的前车相对于路面的车身六自由度运动状态y_real、前车参数及操纵输入估计模块输出的前车车辆参数和前车操纵输入及干扰输入、水层飞溅特征参数识别模块输出的前方水层飞溅运动的特征参数α、水层介质性质判别模块输出的前方车辆遭遇水层液体的固有属性β,首先利用图像识别技术判断前方水层的尺寸及位置pos,再利用深度预测方法预测水层深度d。其中,前方水层的尺寸包括水层的长度l、宽度w。
15.所述本车自动驾驶决策模块,首先基于感知模块输出的道路交通信息info_traffic,采用本车自动驾驶算法计算出未考虑前方水层几何尺寸及位置、水层深度d和水层属性β的初始的本车决策控制策略strategy_ini=[vx;vy;yawrate;futurepath;susmode],其中决策控制策略包括本车未来一段时间内的纵向速度vx、横向速度vy、横摆角速度yawrate、未来行驶轨迹futurepath和悬架控制模式susmode。下一步,基于感知模块输出的本车状态信息和道路交通信息info_traffic、水层介质属性判别模块输出的水层属性β、前方水层判断及水层深度预测模块输出的水层尺寸及几何位置pos和水层深度d,向驾驶员输出危险等级预警的同时,利用修正策略输出本车决策控制策略修正量δstrategy_scp=[δvx_scp;δvy_scp;δyawrate_scp;δfuturepath_scp;δsusmode_scp]。最后,根据修正量δstrategy_scp对初始的本车决策控制策略strategy_ini进行修正,控制本车未来运动状态,包括本车未来的运动轨迹、线速度、线加速度、角速度、角加速度、悬架控制模式。
[0016]
进一步地,所述前车操纵干扰输入子模块中的估计策略,包括纵-横-垂三向联合估计或纵-横-垂三向解耦估计。
[0017]
纵-横-垂三向联合估计,具体为:基于车辆六自由度动力学模型,根据前车相对于路面的车身六自由度运动状态y_real及道路交通信息中的道路坡度,估计前车的驱动、制动及转向的操纵输入以及干扰输入。
[0018]
纵-横-垂三向解耦估计,具体为:根据y_real中的纵向动力学状态及道路交通信息中的纵向道路坡度,利用车辆纵向动力学模型估计前车的制动操纵输入input_brk、驱动操纵输入input_drv,干扰输入的纵向分力fxe;根据y_real中的横向动力学状态及道路交通信息中的横向道路坡度,利用车辆横向动力学模型估计前车的转向操纵输入input_str、干扰输入的侧向分力fye及干扰输入的横摆分力矩mze;接下来从y_real中减去由input_brk、input_drv、input_str、fxe、fye及mze所引起的车身六自由度运动响应y_horizonal,将差值y_real-y_horizonal作为车辆垂向振动模型的输入,估计得到干扰输入的垂向分力fze、干扰输入的侧倾分力矩mxe、干扰输入的俯仰分力矩mye。最终估计的前车操纵输入包括制动操纵输入input_brk、驱动操纵输入input_drv、转向操纵输入input_str;估计的前车干扰输入包括干扰输入的纵向分力fxe、横向分力fye、垂向分力fze、横摆分力矩mze、侧倾分力矩mxe及俯仰分力矩mye。
[0019]
进一步地,所述水层飞溅特征参数识别模块中的识别方法,具体为:
[0020]
首先根据过去时间段内感知模块输出的液体飞溅方向、液体飞溅轨迹,并利用计算机视觉识别算法获得前方水层侧波飞溅的横向距离l_side、最大垂向高度h_side、纵向距离x_side,胎面飞溅最大垂向高度h_pickup、纵向距离x_pickup。接下来根据感知模块输出的液体飞溅时间,并基于物理运动定律,推导计算得到侧波速度大小v_side,侧波速度矢量在xz面内的投影与x轴夹角为θ1、在yz平面内的投影与z轴夹角为θ2、在xy平面内与y轴夹角为θ3,胎面飞溅速度大小v_pickup,胎面飞溅速度矢量与地面夹角θ4;得到水层飞溅特征属性α,包括l_side、h_side、x_side、v_side、v_pickup、θ1、θ2、θ3、θ4。
[0021]
进一步地,所述水层介质属性判别模块中的液体判别方法,包括基于离线数据库的查表法或基于机器学习的判别方法。
[0022]
基于离线数据库的查表法,具体为:制备不同类别、浓度的道路液体,记录制备的液体在飞溅状态下的基本参数,包括飞溅液体颜色lq_color、飞溅液体反射率lq_reflect、
飞溅液体折射率lq_refract、飞溅液体落地声音lq_sound,并形成液体数据库。接下来根据感知模块输出的飞溅液体颜色lq_color、飞溅液体反射率lq_reflect、飞溅液体折射率lq_refract及飞溅液体落地声音lq_sound,对照建立的液体数据库,查询当前前方飞溅液体的属性β,包括液体的类别及对应浓度。
[0023]
基于机器学习的判别方法,具体为:将过去时间段内感知模块获得的飞溅液体颜色、飞溅液体反射率、飞溅液体折射率、飞溅液体落地声音作为机器学习判断模型的输入,输出为前方飞溅液体的属性β,包括液体的类别及对应浓度。
[0024]
进一步地,所述前方水层判断及水层深度预测模块中的预测方法,包括基于机理模型的预测法或基于深度神经网络学习的预测方法。
[0025]
基于机理模型的预测方法,具体为,利用前车实际响应计算模块输出的前车六自由度运动状态y_real、前车参数及输入估计模块输出的前车车辆参数γ及前车输入i、水层介质属性判别模块输出的前方飞溅液体的属性β、水层飞溅特征参数识别模块输出的前方水层飞溅运动的特征参数α及本模块先前判断的前方水层长度l、宽度w及几何位置pos,并根据水层飞溅的动力学模型预测前方水层的深度d:
[0026][0027]
其中,s为前车单侧车轮驶过水层产生飞溅时水层深度计算函数,d为前车两侧车轮同时驶过水层产生飞溅时水层深度计算函数。
[0028]
基于深度神经网络学习的预测方法,具体为:将过去时间段内的前车六自由度运动状态y_real、前车车辆参数γ、前车输入i、前方飞溅液体的属性β、前方水层飞溅运动的特征参数α、及本模块先前判断的前方水层长度l、宽度w及几何位置pos作为深度神经网络的输入,深度神经网络的预测结果为过去时间段内前方水层深度d。
[0029]
进一步地,所述本车自动驾驶决策模块中的修正策略,包括基于规则的修正策略或基于机器学习的修正策略。
[0030]
基于规则的修正策略具体为:首先基于本车自动驾驶算法,将前方水层判断及水层深度预测模块输出的前方水层长度l、宽度w、几何位置pos及水层深度d,本车相对于地面的车身六自由度运动状态y_ego、本车参数δ,以及道路交通信息info_traffic,比对本车初始决策控制策略strategy_ini,判断本车初始决策控制策略strategy_ini是否会导致本车驶过前方水层,然后综合考虑驾驶安全性、舒适性及礼貌性,计算获得本车决策控制策略修正量δstrategy_scp。
[0031]
基于机器学习的修正策略具体为:通过设置不同已知条件,包括前方水层长度l、宽度w、几何位置pos及水层深度d、本车车身六自由度运动状态y_ego、本车参数δ、道路交通信息info_traffic,利用所述基于规则的修正策略,离线计算不同已知条件下,综合考虑驾驶安全性、舒适性及礼貌性的最优本车决策控制策略修正量。根据不同已知条件与计算获得的最优本车决策控制策略修正量对应关系,训练机器学习模型,最终获得模型fcorrect。将过去时间段内的l、w、pos、d、y_ego、δ、info_traffic,输入到机器学习模型fcorrect,输出本车驾驶决策控制的修正量δstrategy_scp。
[0032]
进一步地,所述基于规则的修正策略,包括:
[0033]
(a)如果本车初始决策控制策略strategy_ini会导致驶过前方水层,则:
[0034]
(a1)将l、w、pos、d、y_ego、δ、info_traffic、strategy_ini,输入基于安全性的修正函数fcorrect_safe,求解安全性修正量δstrategy_safe;δstrategy_safe各变量均为区间量。
[0035]
(a2)将步骤(a1)中计算的δstrategy_safe,以及l、w、pos、d、y_ego、δ、info_traffic、strategy_ini,输入基于舒适性的修正函数fcorrect_scomfort,获得舒适性修正量δstrategy_scomfort。δstrategy_scomfort各变量的范围均在δstrategy_safe的范围内或相等。
[0036]
(a3)计算礼貌性修正量δstrategy_scpolite。
[0037]
(a31)若步骤(a1)不能通过δstrategy_safe避免直接驶过水层,则需将δstrategy_scomfort、l、w、pos、d、y_ego、δ、info_traffic、strategy_ini输入基于礼貌性的修正函数fcorrect_scpolite,获得礼貌性修正量δstrategy_scpolite。δstrategy_scpolite各变量的范围均在δstrategy_scomfort的范围内或相等。
[0038]
(a32)若步骤(a1)能通过δstrategy_safe避免直接驶过水层,则步骤(a2)计算舒适性修正量δstrategy_scomfort后,无需考虑针对礼貌驾驶的修正,δstrategy_scpolit各变量的范围与δstrategy_scomfort相等。
[0039]
(a4)输出本车决策控制策略修正量:从δstrategy_scpolite区间量中选择各修正量的最优值,作为本车决策控制策略修正量δstrategy_scp。其中,δstrategy_scp的各维度δvx_scp、δvy_scp、δyawrate_scp、δfuturepath_scp、δsusmode_scp通过使目标函数j最大获得:
[0040]
j=w1*g1(l,w,pos,d,y_ego,δ,info_traffic,strategy_ini,δstrategy_scp) w2*g2(l,w,pos,d,y_ego,δ,info_traffic,strategy_ini,δstrategy_scp) w3*g3(l,w,pos,d,y_ego,δ,info_traffic,strategy_ini,δstrategy_scp)
[0041]
其中,w1、w2、w3分别代表安全性、舒适性、礼貌性的权重,函数g1、g2、g3分别计算在本车决策控制策略修正量δstrategy_scp下本车的安全性、舒适性及礼貌性指标,δstrategy_scp各变量的约束条件为对应δstrategy_scpolite各维度的区间。
[0042]
(b)如果本车初始决策控制策略strategy_ini不会导致驶过前方水层,则:
[0043]
(b1)只计算舒适性修正量δstrategy_comfort’,将y_ego、δ、info_traffic、strategy_ini输入舒适性修正函数fcorrect_comfort’,得到δstrategy_comfort’。δstrategy_comfort’各变量均为区间量。
[0044]
(b2)输出本车决策控制策略修正量:从δstrategy_comfort’的区间量中选择各修正量的最优值δstrategy_scp。
[0045]
进一步地,步骤(a1)中,fcorrect_safe函数的构造规则是:在遵守道路交通规则的前提下,根据本车自动驾驶算法判断是否能实现避免直接驶过水层的目标。若能实现,则根据本车自动驾驶算法计算δstrategy_safe,包括修正量δvx_safe、δvy_safe、δyawrate_safe、δfuturepath_safe、δsusmode_safe,保证车辆避免直接驶过水层。若不能实现,则在保证本车驶过水层时的安全性的前提下,计算δstrategy_safe,包括修正量δvx_safe、δvy_safe、δyawrate_safe、δfuturepath_safe、δsusmode_safe;计算规则具体为,水层纵向长度l越长、横向宽度w越宽、深度d越深,表明前方水层存在的潜在危险越大,则本车的修正量δvx_safe、δvy_safe、δyawrate_safe、δfuturepath_safe、δ
susmode_safe数值越大且为负。
[0046]
进一步地,步骤(a2)中,fcorrect_scomfort函数的构造规则是:在δstrategy_safe保证本车安全的前提下,以本车乘员的乘坐舒适为目标,计算δstrategy_scomfort,包括δvx_scomfort、δvy_scomfort、δyawrate_scomfort、δfuturepath_scomfort、δsusmode_scomfort;计算规则具体为:
[0047]
若步骤(a1)计算的δstrategy_safe不能避免直接驶过水层,前方水层深度d越深,表明道路越不平整,则本车的修正量δvx_scomfort、δvy_scomfort、δyawrate_scomfort、δfuturepath_scomfort、δsusmode_scomfort随时间的变化率越小,以提高本车的舒适性;
[0048]
若步骤(a1)中计算的δstrategy_safe能避免直接驶过前方水层,则使修正量δvx_scomfort、δvy_scomfort、δyawrate_scomfort、δfuturepath_scomfort、δsusmode_scomfort随时间的变化率尽可能的小。
[0049]
进一步地,步骤(b1)中,fcorrect_comfort’函数的构造规则是:以本车驾驶舒适为目标,计算修正量δstrategy_comfort’,包括δvx_comfort、δvy_comfort、δyawrate_comfort、δfuturepath_comfort、δsusmode_comfort。本车初始决策控制策略strategy_ini规划的路径上道路越不平整,本车vx、vy越大,则δvx_comfort、δvy_comfort、δyawrate_comfort、δfuturepath_comfort、δsusmode_comfort随时间的变化率越小。
[0050]
进一步地,步骤(a31)中,fcorrect_scpolite函数的构造规则是:在δstrategy_scomfort保证本车驶过水层的安全性及舒适性的前提下,以礼貌驾驶为目标,计算δstrategy_scpolite,包括δvx_scpolite、δvy_scpolite、δyawrate_scpolite、δfuturepath_scpolite、δsusmode_scpolite。计算规则具体为:当水层纵向长度l越长、横向宽度w越宽、深度d越深,本车相对于水平地面的车身六自由度运动状态中的纵向车速vx、横向车速vy越大,表明本车驶过前方水层产生的液体飞溅对周围交通车辆、非机动车及行人所产生的消极影响越大,则本车的修正量δvx_scpolite、δvy_scpolite、δyawrate_scpolite、δfuturepath_scpolite数值越大且为负,δsusmode_scpolite与δsusmode_scomfort相等,以提高本车的驾驶礼貌性。
[0051]
本发明的有益效果是:
[0052]
1、考虑了前车驶过水层时的驾驶行为、运动状态、水层飞溅特征对本车决策控制的影响,通过预测前方道路存在的水层属性、几何位置及水层深度,对自动驾驶的决策、轨迹规划、控制进行修正,提高了本车驾驶过程中的安全性;
[0053]
2、综合考虑了前车运动状态、前车参数及前方水层飞溅特征对前方水层的几何位置及深度进行了预测,有效增加了自动驾驶决策控制的信息获取和预见性,提高了决策控制的有效性,能有效改善行驶的安全性;尤其在夜晚、雨天等条件下,驾驶员及车载传感器平台获取道路信息能力有限,本发明可显著拓展自动驾驶感知与预测的能力边界;
[0054]
3、本发明通过预测前方水层属性、几何位置及水层深度进行估计,基于此对本车决策控制进行修正,保证本车行驶安全性的同时,提高乘员舒适性;并最大程度减少飞溅水花对旁车、非机动车及行人的影响,实现礼貌驾驶。除全自动驾驶车辆外,本发明也可基于提醒或驾驶主动干预的形式应用于人工驾驶车辆、半自动驾驶车辆,提高车辆驾驶的安全性、舒适性及礼貌性。
附图说明
[0055]
此处说明的附图为本发明提供进一步理解,构成本发明的一部分,并不构成对本发明的限定。
[0056]
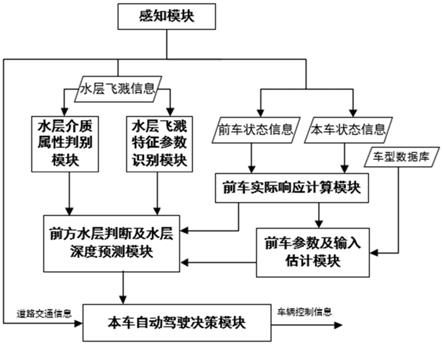
图1为本发明系统组成与流程示意图;
[0057]
图2为在红绿灯十字路口右转右侧驶过水层时的示意图;
[0058]
图3为前车驶过水层时产生飞溅后视图示意图;
[0059]
图4为前车驶过水层时产生飞溅侧视图示意图;
[0060]
图5为前车驶过水层时侧波(左)与胎面飞溅(右)速度矢量示意图;
[0061]
图6为前车直行双侧同时驶过水层俯视图示意图;
[0062]
图7为侧前方车直行右侧单侧驶过宽水层俯视图示意图。
具体实施方式
[0063]
为使本发明的目的、技术方案和优点更加清楚明白,下面结合实施方式和附图,对本发明做进一步详细说明。在此,本发明的示意性实施方式及其说明用于解释本发明,但并不作为对本发明的限定。
[0064]
如图1所示,本发明一种基于道路水层深度估计的驾驶决策的系统,包括感知模块、前车实际响应计算模块、前车参数及输入估计模块、水层介质属性判别模块、水层飞溅特征参数识别模块、前方水层判断及水层深度预测模块和本车自动驾驶决策模块。
[0065]
(1)感知模块通过传感器获取道路交通信息、本车状态信息、前车状态信息、前方水层飞溅信息。这些信息通过车载高清摄像头、激光雷达、车载噪声传感器、高精地图、车联网信息获得。
[0066]
道路交通信息包括路面附着系数、车道宽度、车道数量、道路坡度、车道曲率、车道标志线、障碍物、交通指示牌、交通信号灯状态、行人信息、交通流信息和天气状态。
[0067]
本车状态信息包括本车参数δ、本车相对于水平地面的车身六自由度运动状态y_ego和操纵输入。操纵输入包括转向、制动、驱动、指示灯和警示喇叭的操作。
[0068]
前车状态信息包括前车相对于本车的车身六自由度运动状态y_relative、车辆外形参数、车牌信息、刹车指示灯状态、转向指示灯状态、轮胎滚动印记、喇叭警示音、轮胎路面噪声、动力传动系统噪声。
[0069]
前方水层表示行车道路由于受日常风化侵蚀、重载车辆压损、道路施工等原因产生道路凹坑,后在降雨天气由于降水量较大、道路坡度小、排水不畅等原因产生的道路水层,其属性包括雨水积水、泥浆等。
[0070]
前方水层飞溅信息包括飞溅液体颜色、飞溅液体反射率、飞溅液体折射率、液体飞溅轨迹、液体飞溅方向、液体飞溅时间、飞溅液体落地声音。
[0071]
其中,车身六自由度运动状态包括车辆车身刚体的六个运动自由度:线速度、角速度、线加速度、角加速度、位置及姿态角。
[0072]
(2)前车实际响应计算模块,基于感知模块输出的本车状态信息及前车状态信息,将前方车辆视为刚体,依据刚体相对运动合成原理,将本车相对于水平地面的车身六自由度运动状态y_ego、前车相对于本车的车身六自由度运动状态y_relative进行叠加,得到此时此刻在当前路况下,前车相对于水平路面的车身六自由度运动状态y_real。其中y_real
为随时间变化的多维向量。
[0073]
(3)前车参数及输入估计模块,负责根据前方车辆外形、六自由度运动状态y_real,估计前方车辆参数以及过去时间段内前车驾驶员操纵输入。该模块包括前车参数估计子模块和前车操纵干扰输入估计子模块。
[0074]
(3.1)前车参数估计子模块,基于感知模块输出的前车状态信息中的车辆外形参数、车牌信息、轮胎滚动印记、轮胎路面噪声,并结合车辆型别数据库,确定前车车辆型别,从而估计前车车辆参数γ,包括前车质量m、轮距d_w、轮宽b、横摆转动惯量i_r、空气阻力系数cd等。车辆型别包括轿车、运动型多用途汽车suv、轻型货车、中型货车、重型货车。
[0075]
(3.2)前车操纵干扰输入子模块,基于前车实际响应计算模块输出的前车相对水平路面的车身六自由度运动状态y_real、前车参数估计子模块输出的前车车辆参数γ,通过车辆动力学模型,估计前车输入i,包括操纵输入和干扰输入。其中,车辆动力学模型包括车辆六自由度动力学模型、车辆纵向动力学模型、车辆横向动力学模型、车辆垂向振动模型(包括车辆单自由度垂向振动模型、车辆二自由度垂向振动模型、车辆垂向-俯仰-侧倾振动模型)。
[0076]
前车操纵干扰输入子模块中的估计策略,包括纵-横-垂三向联合估计、纵-横-垂三向解耦估计。
[0077]
纵-横-垂三向联合估计具体为:基于车辆六自由度动力学模型,根据前车相对于水平路面的车身六自由度运动状态y_real及道路交通信息中的道路坡度,估计前车的驱动、制动及转向的操纵输入以及干扰输入。
[0078]
纵-横-垂三向解耦估计具体为:
[0079]
根据y_real中的纵向动力学状态及道路交通信息中的纵向道路坡度,利用车辆纵向动力学模型,估计前车的制动操纵输入input_brk、驱动操纵输入input_drv、干扰输入的纵向分力fxe。
[0080]
根据y_real中的横向动力学状态及道路交通信息中的横向道路坡度,利用车辆横向动力学模型,估计前车的转向操纵输入input_str、干扰输入的侧向分力fye及干扰输入的横摆分力矩mze。
[0081]
接下来,从y_real中减去,由input_brk、input_drv、input_str、fxe、fye及mze,引起的车身六自由度运动响应y_horizonal;将差值y_real-y_horizonal作为车辆垂向振动模型的输入,估计得到前车的干扰输入的垂向分力fze、干扰输入的侧倾分力矩mxe、干扰输入的俯仰分力矩mye。
[0082]
最终,估计的前车操纵输入,包括制动操纵输入input_brk、驱动操纵输入input_drv、转向操纵输入input_str;估计的前车干扰输入,包括干扰输入的纵向分力fxe、横向分力fye、垂向分力fze、横摆分力矩mze、侧倾分力矩mxe及俯仰分力矩mye。
[0083]
(4)水层飞溅特征参数识别模块,负责计算推导前方水层关键运动参数。基于感知模块输出的液体飞溅轨迹、液体飞溅方向和液体飞溅时间,基于图像识别及运动原理推导,识别前方水层飞溅运动的特征参数α。具体为:
[0084]
首先,利用车载高清摄像头,输出过去时间段内前方车辆驶过水层产生的液体飞溅方向、液体飞溅轨迹,并利用已标定的计算机视觉识别算法,获得前方水层侧波飞溅的横向距离l_side、最大垂向高度h_side、纵向距离x_side,胎面飞溅最大垂向高度h_pickup、
纵向距离x_pickup。
[0085]
接下来,根据感知模块输出的液体飞溅时间t,并基于物理运动定律,推导计算得到侧波速度大小v_side、侧波速度矢量在xz面内的投影与x轴夹角θ1、在yz平面内的投影与z轴夹角θ2、在xy平面内与y轴夹角θ3,胎面飞溅速度大小v_pickup、胎面飞溅速度矢量与水平地面夹角θ4。
[0086]
综合以上参数得到水层飞溅特征α,包括l_side、h_side、x_side、v_side、v_pickup、θ1、θ2、θ3、θ4。
[0087]
其中,物理运动定律为斜抛运动规律,物体斜抛的初始运动状态可根据物体落到水平地面时间、横向距离、最大纵向高度来推导获得。
[0088]
(5)水层介质属性判别模块,负责判别前方水层具体属性,包括液体类别及对应浓度。基于感知模块输出的飞溅液体颜色、飞溅液体反射率、飞溅液体折射率和飞溅液体落地声音,并利用液体判别方法,识别前方车辆遭遇水层的液体类型,进而得到遭遇水层液体的固有属性β,包括液体的类别及对应浓度。
[0089]
水层介质属性判别模块中的液体判别方法,包括基于离线数据库的查表法、基于机器学习的判别方法。
[0090]
基于离线数据库的查表法具体为:人为制备不同类别、浓度的道路常见液体,利用精密设备,记录制备的液体在飞溅状态下的基本参数,包括飞溅液体颜色lq_color、飞溅液体反射率lq_reflect、飞溅液体折射率lq_refract、飞溅液体落地声音lq_sound,并形成敏感度较高的液体数据库,其中不同液体的类别及浓度,对应各自的飞溅液体颜色lq_color、飞溅液体反射率lq_reflect、飞溅液体折射率lq_refract、飞溅液体落地声音lq_sound。然后根据感知模块输出的飞溅液体颜色lq_color、飞溅液体反射率lq_reflect、飞溅液体折射率lq_refract及飞溅液体落地声音lq_sound,对照建立的液体数据库,查询当前前方飞溅液体的属性β,包括液体的类别及对应浓度。
[0091]
基于机器学习的判别方法具体为:将过去时间段内,感知模块获得的飞溅液体颜色、飞溅液体反射率、飞溅液体折射率、飞溅液体落地声音,作为机器学习判断模型的输入,输出为前方飞溅液体的属性β,包括液体的类别及对应浓度。其中,机器学习判别模型的训练具体为,通过实验获得不同类别及浓度液体飞溅时的颜色、反射率、折射率及落地声音,基于不同液体飞溅时的颜色、反射率、折射率及落地声音与液体类别、浓度的对应关系训练机器学习判别模型。
[0092]
(6)前方水层判断及水层深度预测模块,基于前车实际响应计算模块输出的前车相对于水平路面的车身六自由度运动状态y_real、前车参数及操纵输入估计模块输出的前车车辆参数和前车操纵输入及干扰输入、水层飞溅特征参数识别模块输出的前方水层飞溅运动的特征参数α、水层介质性质判别模块输出的前方车辆遭遇水层液体的固有属性β,利用图像识别技术,判断前方水层的尺寸及几何位置pos,再利用预测方法预测水层深度d。其中,前方水层的尺寸包括水层的纵向长度l、横向宽度w。
[0093]
前方水层判断及水层深度预测模块中的预测方法,包括基于机理模型的预测法、基于深度神经网络学习的预测方法。
[0094]
基于机理模型的预测方法具体为:利用前车实际响应计算模块输出的前车六自由度运动状态y_real、前车参数及输入估计模块输出的前车车辆参数γ及前车输入i、水层介
质属性判别模块输出的前方飞溅液体的属性β、水层飞溅特征参数识别模块输出的前方水层飞溅运动的特征参数α及本模块先前判断的前方水层纵向长度l、横向宽度w及几何位置pos,并根据水层飞溅的动力学模型,预测前方水层的深度d:
[0095][0096]
其中,i为前车输入估计;s为前车单侧车轮驶过水层产生飞溅时水层深度计算函数,d为前车两侧车轮同时驶过水层产生飞溅时水层深度计算函数。计算函数s、d通过实验数据回归拟合获得,具体为在不同实验参数的组合下,观察记录对应水层飞溅结果,基于此获得计算函数s、d。
[0097]
基于深度神经网络学习的预测方法具体为:将过去时间段内的前车六自由度运动状态y_real、前车车辆参数γ、前车输入i、前方飞溅液体的属性β、前方水层飞溅运动的特征参数α、及本模块先前判断的前方水层纵向长度l、横向宽度w及几何位置pos,作为深度神经网络的输入,深度神经网络的预测结果为过去时间段内前方水层深度d。其中,深度神经网络学习的训练,具体为:利用流体力学仿真软件模拟不同的实验参数组合,即(y_real,β,γ,i,l,w,pos,d),对应产生的前方水层飞溅运动的特征参数α,将对应的仿真实验条件与结果作为训练样本,对深度神经网络模型进行训练。
[0098]
(7)本车自动驾驶决策模块:
[0099]
首先基于感知模块输出的道路交通信息info_traffic,本车自动驾驶算法计算出,未考虑前方水层几何位置pos、水层深度d和水层属性β的,初始的本车决策控制策略strategy_ini=[vx;vy;yawrate;futurepath;susmode],包括本车未来一段时间内的纵向速度vx、横向速度vy、横摆角速度yawrate、未来行驶轨迹futurepath和悬架控制模式susmode。
[0100]
然后,基于感知模块输出的本车状态信息和道路交通信息info_traffic、水层介质属性判别模块输出的水层属性β、前方水层判断及水层深度预测模块输出的水层尺寸及位置pos和水层深度d,向驾驶员输出危险预警的同时,利用修正策略输出本车决策控制策略修正量δstrategy_scp=[δvx;δvy;δyawrate;δfuturepath;δsusmode]。其中,输出危险预警具体为,通过语音播报的方式向驾驶员提供前方水层几何位置pos、纵向长度l、横向宽度w、水层深度d的信息。δstrategy_scp为考虑本车行驶安全性、舒适性、礼貌性的修正量。
[0101]
最后,根据本车决策控制策略修正量δstrategy_scp,对初始的本车决策控制策略strategy_ini进行修正,控制本车未来运动状态,包括本车未来的运动轨迹、线速度、角速度、悬架控制模式。
[0102]
本车自动驾驶决策模块中的修正策略,包括基于规则的修正策略、基于机器学习的修正策略。
[0103]
基于规则的修正策略具体为:首先基于本车自动驾驶算法,将前方水层判断及水层深度预测模块输出的前方水层纵向长度l、横向宽度w、几何位置pos及水层深度d,本车相对于水平地面的车身六自由度运动状态y_ego、本车参数δ,以及道路交通信息info_traffic,比对本车初始决策控制策略strategy_ini,判断本车初始决策控制策略strategy_ini是否会导致本车驶过前方水层。
[0104]
(a)如果本车初始决策控制策略strategy_ini会导致驶过前方水层,则:
[0105]
(a)将l、w、pos、d、y_ego、δ、info_traffic、strategy_ini,输入基于安全性的修正函数fcorrect_safe,求解安全性修正量δstrategy_safe:
[0106]
δstrategy_safe=fcorrect_safe(l,w,pos,d,y_ego,δ,info_traffic,strategy_ini)
[0107]
其中,fcorrect_safe函数的构造规则是:在遵守道路交通规则的前提下,根据本车自动驾驶算法判断是否能实现避免直接驶过水层的目标。若能实现,则根据本车自动驾驶算法计算δstrategy_safe,包括修正量δvx_safe、δvy_safe、δyawrate_safe、δfuturepath_safe、δsusmode_safe,保证车辆避免直接驶过水层。若不能实现,则在保证本车驶过水层时的安全性的前提下,计算δstrategy_safe,包括修正量δvx_safe、δvy_safe、δyawrate_safe、δfuturepath_safe、δsusmode_safe;计算规则具体为,水层纵向长度l越长、横向宽度w越宽、深度d越深,表明前方水层存在的潜在危险越大,则本车的修正量δvx_safe、δvy_safe、δyawrate_safe、δfuturepath_safe、δsusmode_safe数值越大且为负。本步骤计算的安全性修正量δstrategy_safe各变量均为区间量。
[0108]
(b)将步骤(a)中计算的δstrategy_safe,以及l、w、pos、d、y_ego、δ、info_traffic、strategy_ini,输入基于舒适性的修正函数fcorrect_scomfort,获得舒适性修正量δstrategy_scomfort:
[0109]
δstrategy_scomfort=
[0110]
fcorrect_scomfort(l,w,pos,d,y_ego,δ,info_traffic,strategy_ini,δstrategy_safe)
[0111]
其中,fcorrect_scomfort函数的构造规则是:在δstrategy_safe保证本车安全的前提下,以本车乘员的乘坐舒适为目标,计算δstrategy_scomfort,包括δvx_scomfort、δvy_scomfort、δyawrate_scomfort、δfuturepath_scomfort、δsusmode_scomfort;计算规则具体为:
[0112]
若步骤(a)计算的δstrategy_safe不能避免直接驶过水层,前方水层深度d越深,表明道路越不平整,则本车的修正量δvx_scomfort、δvy_scomfort、δyawrate_scomfort、δfuturepath_scomfort、δsusmode_scomfort随时间的变化率越小,以提高本车的舒适性;
[0113]
若步骤(a)中计算的δstrategy_safe能避免直接驶过前方水层,则使修正量δvx_scomfort、δvy_scomfort、δyawrate_scomfort、δfuturepath_scomfort、δsusmode_scomfort随时间的变化率尽可能的小。
[0114]
本步骤计算的舒适性修正量δstrategy_scomfort为基于步骤(a)的安全性修正量δstrategy_safe获得的较小区间量,即δstrategy_scomfort各变量的范围均在δstrategy_safe中对应的各变量的范围内或相等。
[0115]
(c)计算礼貌性修正量δstrategy_scpolite。
[0116]
(c1)若步骤(a)不能通过δstrategy_safe避免直接驶过水层,则需将δstrategy_scomfort、l、w、pos、d、y_ego、δ、info_traffic、strategy_ini输入基于礼貌性的修正函数fcorrect_scpolite,获得礼貌性修正量δstrategy_scpolite:
[0117]
δstrategy_scpolite=
[0118]
fcorrect_scpolite(l,w,pos,d,y_ego,δ,info_traffic,strategy_ini,δstrategy_scomfort)
[0119]
其中,fcorrect_scpolite函数的构造规则是:在δstrategy_scomfort保证本车驶过水层的安全性及舒适性的前提下,以礼貌驾驶为目标,计算δstrategy_scpolite,包括δvx_scpolite、δvy_scpolite、δyawrate_scpolite、δfuturepath_scpolite、δsusmode_scpolite。计算规则具体为:当水层纵向长度l越长、横向宽度w越宽、深度d越深,本车相对于水平地面的车身六自由度运动状态中的纵向车速vx、横向车速vy越大,表明本车驶过前方水层产生的液体飞溅对周围交通车辆、非机动车及行人所产生的消极影响越大,则本车的修正量δvx_scpolite、δvy_scpolite、δyawrate_scpolite、δfuturepath_scpolite数值越大且为负,δsusmode_scpolite与δsusmode_scomfort相等,以提高本车的驾驶礼貌性。
[0120]
本步骤计算的礼貌性修正量δstrategy_scpolite为基于步骤(b)修正量δstrategy_scomfort获得的最小区间量,即δstrategy_scpolite各变量的范围均在δstrategy_scomfort中对应的各变量的范围内或相等。
[0121]
(c2)若步骤(a)能通过δstrategy_safe避免直接驶过水层,则步骤(b)计算舒适性修正量δstrategy_scomfort后无需考虑礼貌性修正量,即δstrategy_scpolit=δstrategy_scomfort。
[0122]
(d)最终输出本车决策控制策略修正量,执行时从δstrategy_scpolite区间量中选择各修正量的最优值。最优修正量δstrategy_scp的各维度δvx_scp、δvy_scp、δyawrate_scp、δfuturepath_scp、δsusmode_scp通过使目标函数j最大获得:
[0123]
j=w1*g1(l,w,pos,d,y_ego,δ,info_traffic,strategy_ini,δstrategy_scp)
[0124]
w2*g2(l,w,pos,d,y_ego,δ,info_traffic,strategy_ini,δstrategy_scp)
[0125]
w3*g3(l,w,pos,d,y_ego,δ,info_traffic,strategy_ini,δstrategy_scp)
[0126]
其中,w1、w2、w3分别代表安全性、舒适性、礼貌性的权重,函数g1、g2、g3分别计算在本车决策控制策略修正量δstrategy_scp下本车的安全性、舒适性及礼貌性的量化指标,δstrategy_scp各变量的约束条件为对应δstrategy_scpolite各维度的区间。
[0127]
(b)如果本车初始决策控制策略strategy_ini不会导致驶过前方水层,则:
[0128]
(e)只计算舒适性修正量δstrategy_comfort’,将y_ego,δ,info_traffic,strategy_ini输入舒适性修正函数fcorrect_comfort’:
[0129]
δstrategy_comfort’=fcorrect_comfort’(y_ego,δ,info_traffic,strategy_ini)
[0130]
其中,fcorrect_comfort’函数的构造规则是:以本车驾驶舒适为目标,计算修正量δstrategy_comfort’,包括δvx_comfort、δvy_comfort、δyawrate_comfort、δfuturepath_comfort、δsusmode_comfort。本车初始决策控制策略strategy_ini规划的路径上道路越不平整,本车vx、vy越大,则δvx_comfort、δvy_comfort、δyawrate_comfort、δfuturepath_comfort、δsusmode_comfort随时间的变化率越小。
[0131]
本步骤计算的安全性修正量δstrategy_comfort’各变量均为区间量。
[0132]
(f)最终输出本车决策控制策略修正量,执行时从δstrategy_comfort’的区间量中选择各修正量的最优值δstrategy_scp。
[0133]
基于机器学习的修正策略具体为:将过去时间段内获得的前方水层纵向长度l、横向宽度w、几何位置pos及水层深度d、本车车身六自由度运动状态y_ego、本车参数δ、道路交通信息info_traffic,输入到机器学习模型fcorrect,输出本车决策控制策略修正量δstrategy_scp=fcorrect(l,w,pos,d,y_ego,δ,info_traffic);该修正量为综合考虑了本车自动驾驶的安全性、舒适性、礼貌性的最优值。
[0134]
其中,机器学习模型fcorrect的训练过程是:通过人为设置不同已知条件,包括前方水层纵向长度l、横向宽度w、几何位置pos及水层深度d、本车车身六自由度运动状态y_ego、本车参数δ、道路交通信息info_traffic,利用上述基于规则的修正策略,离线计算不同已知条件下,综合考虑驾驶安全性、舒适性及礼貌性的最优本车决策控制策略修正量。然后根据不同已知条件与计算获得的最优本车决策控制策略修正量对应关系,训练机器学习模型,最终获得模型fcorrect。
[0135]
实施例
[0136]
以雨天的红绿灯十字路口前车右转遭遇水层为实施例应用场景1,如图2所示,此时直行信号灯为红灯,允许右转车道车辆右转,非机动车及行人在路口等候红绿灯。感知模块提供交通路况信息,涵盖过去时间段τ,记采用步长为ts,时间τ=k*ts,即从当前时刻t0及k个采样步长内的所有感知数据都可用于本系统实施。
[0137]
感知模块已获得过去时间段τ内,道路交通信息中的道路坡度、道路曲率、车道边界线、车道宽度、交通信号灯状态、行人信息、交通流信息等。
[0138]
前车实际响应计算模块基于获得的本车状态信息及前车状态信息,将前方车辆视为刚体,依据刚体相对运动合成原理将本车相对于水平地面的车身六自由度运动状态y_ego、前车相对于本车的车身六自由度运动状态y_relative进行叠加,得到前车相对于水平路面的车身六自由度运动状态y_real。
[0139]
前车参数及输入估计模块首先根据前车车辆外形、车牌信息、轮胎滚动印记,通过查找车辆型别数据库确定前车车辆型别,并估计前车车辆参数γ;在该例中根据车辆型别数据库,提取相应模型所需要的参数,包括质量为1600kg,横摆转动惯量为2300kg
·
m2,空气阻力系数为0.34,轮距d_w为1785mm、轮宽b为195mm等。
[0140]
下一步对前车输入估计策略采用纵-横-垂三向解耦估计策略,在本实施例中前车纵向速度减少,且车辆航向角向右偏转,首先通过车辆纵向动力学模型估计前车的制动操纵输入input_brk;再利用车辆横向动力学模型估计前车的转向操纵输入input_str;从前车实际六自由度运动状态y_real中除去由input_brk、input_str所引起的车身六自由度运动响应y_horizonal,即获得差值y_real-y_horizonal,最后根据车辆垂向振动模型估计干扰输入的垂向分力fze、侧倾分力矩mxe、俯仰分力矩mye。最终综合估计得到前车输入i,包括操纵输入及干扰输入。
[0141]
接下来根据车载高清摄像头获得的前车驶过水层时产生的影像获得液体飞溅方向、轨迹等信息,在本实施例中,前车右侧单侧车轮驶过水层,后视图与侧视图如图3、图4所示。利用已标定的计算机图像识别算法估计前车驶过水层时侧波飞溅的横向距离l_side、最大垂向高度h_side、纵向距离x_side,胎面飞溅最大垂向高度h_pickup、纵向距离x_pickup,根据对应液体的飞溅时间t实时推理计算得到侧波速度大小v_side,侧波速度矢量在xz面内的投影与x轴夹角为θ1、在yz平面内的投影与z轴夹角为θ2、在xy平面内与y轴夹角
为θ3;胎面飞溅速度大小v_pickup、胎面飞溅速度矢量与水平地面夹角θ4,如图5所示。综合以上参数得到水层飞溅特征α。
[0142]
在识别前方水层飞溅特征α的同时,水层介质属性判别模块利用基于机器学习的判别方法判别前方水层类别及对应浓度。将过去时间段内感知模块获得的溅液体颜色、反射率、折射率、落地声音作为机器学习判断模型的输入,输出为前方飞溅液体的属性β,包括液体的类别及对应浓度。在该实施例中,由于重载车辆经常在该路口右转造成道路凹坑破损,前方水层为普通道路降雨积水。
[0143]
下一步前方水层判断及水层深度预测模块首先利用车载高清摄像头获得的图像估计前方水层的几何尺寸及位置,在实施例中水层为长l=1m、宽w=1m、pos具体为横向位于前车右侧车轮且距离本车5m的水层。本实施例中前方水层深度估计策略采用基于机理模型的预测方法,将前车真实六自由度运动状态y_real、水层飞溅运动参数α、水层固有属性β、前车车辆参数γ、前车输入i、水层长宽l、w及几何位置pos输入深度预测函数:
[0144][0145]
本实施例中由于前车为右侧单侧驶过水层,故深度预测函数选择s,计算得到前方水层深度d。
[0146]
最后,本车自动驾驶决策模块首先基于感知模块输出的道路交通信息info_traffic,本车自动驾驶算法计算出未考虑前方水层几何位置、水层深度d和水层属性β的初始的本车决策控制策略strategy_ini,本实施例中,即经过红绿灯路口时右转通过。但考虑到前方车辆驶过产生飞溅,说明前方存在未知深度水层,因此需要对本车的控制策略进行修正,本实施例中修正策略采取基于规则的修正策略。首先根据本车初始决策控制策略strategy_ini并判断本车是否会驶过水层,本实施例中由于本车也处于右转车道,所以必定驶过前方水层。
[0147]
(a)首先将信息l、w、pos、d、y_ego、δ、info_traffic、strategy_ini输入到基于安全性的修正函数fcorrect_safe,求解获得安全性修正量δstrategy_safe,在该实施例中由于水层位于路口实线车道,因此δstrategy_safe不能使本车避免直接驶过前方水层。
[0148]
δstrategy_safe=fcorrect_safe(l,w,pos,d,y_ego,δ,info_traffic,strategy_ini)
[0149]
(b)将(a)中计算的δstrategy_safe,以及l、w、pos、d、y_ego、δ、info_traffic、strategy_ini,输入基于舒适性的修正函数fcorrect_scomfort,获得舒适性修正量δstrategy_scomfort:
[0150]
δstrategy_scomfort=
[0151]
fcorrect_scomfort(l,w,pos,d,y_ego,δ,info_traffic,strategy_ini,δstrategy_safe)
[0152]
(c)将(b)中计算的δstrategy_scomfort,以及l、w、pos、d、y_ego、δ、info_traffic、strategy_ini输入基于礼貌性的修正函数fcorrect_scpolite,获得礼貌性修正量δstrategy_scpolite:
[0153]
δstrategy_scpolite=
[0154]
fcorrect_scpolite(l,w,pos,d,y_ego,δ,info_traffic,strategy_ini,δ
strategy_scomfort)
[0155]
(d)从δstrategy_scpolite的区间量中选择各修正量的最优值δstrategy_scp,最终输出本车决策控制策略修正量,该修正量综合考虑了本车安全性、舒适性、礼貌性。
[0156]
图6、7给出了本实施例的其他两个应用场景2、3,图6中前车直行两侧车轮同时驶过未知深度水层,两侧同时产生水层飞溅轨迹、飞溅液体落地声音等;图7中左侧车道前方车辆右侧车轮驶过较宽位置深度水层,向右产生水层飞溅轨迹、飞溅液体落地声音等。针对这两个应用场景2、3,本发明同样可以从当前时刻t0及k个采样步长内的所有感知数据,根据图1所示的前车实际响应计算、前车参数及输入估计、水层飞溅特征参数识别、水层介质属性判别、水层位置判断及深度预测等流程,获得本车综合考虑安全性、舒适性及礼貌性的决策与控制的修正量δstrategy_scp,包括减速、转向等修正,实现本车安全驾驶,并最大程度减少水层飞溅对其他交通参与者的影响。
[0157]
本发明实施例并不限定于任何特定的模型,以上所述仅为本发明的优选实施例,并不用于限制本发明,对于本领域的技术人员来说,本发明实施例可以有各种更改和变化。凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
