1.本发明涉及农机调控领域,尤其涉及一种智能化花生采集农机系统。
背景技术:
2.机械就是能帮人们降低工作难度或省力的工具装置,像筷子、扫帚以及镊子一类的物品都可以被称为机械,它们是简单机械。而复杂机械就是由两种或两种以上的简单机械构成。通常把这些比较复杂的机械叫做机器。从结构和运动的观点来看,机构和机器并无区别,泛称为机械。
3.机械的一般定义如下:任何机械(machine)都是由用各种不同方式连接起来的一组构件组成,使其一个构件运动,其余构件将发生一定的运动,这些构件与最初运动之构件的相对运动关系取决于它们之间连接的性质。
4.当前,在采用农业化机械执行对花生种植区域的花生果实的收获操作中存在以下两处问题:第一个问题是,通过挖掘花生种植区域获得的混合物包括泥土、果实和根茎,即使在前端执行振动皮带的振动处理,去除了少量的泥土,但无法完全去除泥土,导致上述三种物体的分拣较为困难;第二个问题是,不同花生种植区域的生长状况不同,对整体偏绿的花生秧体强行收获,必然导致收获产品质量不佳。
技术实现要素:
5.为了解决相关领域的技术问题,本发明提供了一种智能化花生采集农机系统,能够在花生收获机械中引入针对性设计的泥土、果实和根茎分拣机制,更重要的是,采用了花生叶体整体视觉分析机制,对待收获的花生种植区域的花生成熟程度执行整体判断,从而提升收获产品的成熟度和质量。
6.相比较于现有技术,本发明具备以下两处突出的实质性特点:
7.(1)用于对花生收获机械前方花生种植区域各个叶体的黄绿程度执行整体化分析,以基于分析结果判断前方花生种植区域各个叶体整体趋黄还是整体趋绿,从而为确定是否允许收获提供关键数据;
8.(2)具体的整体化分析中,将构成叶体的像素点组成一个像素点集合,获得所述像素点集合的各个像素点分别对应的各个黄色分量数值,将去除最值后剩余的多个黄色分量数值中出现频率最频繁的黄色分量数值作为典型分量数值,以及在所述典型分量数值与255的差值小于等于预设差值限量时,判断前方花生种植区域各个叶体整体趋黄,并发出使能收获信号。
9.根据本发明的一方面,提供了一种智能化花生采集农机系统,所述系统包括:
10.花生采集农机,包括根茎挖掘机构、振动传输机构、果体分拣机构、泥土传送机构、果体存放盒体、根茎破碎机构、根茎存放盒体、底座、单个转向轮体以及一对随动轮体;
11.其中,所述单个转向轮体设置在所述一对随动轮体的前方,所述单个转向轮体以及所述一对随动轮体都设置在所述底座的下方。
12.更具体地,在所述智能化花生采集农机系统中:
13.所述根茎挖掘机构、所述振动传输机构、所述果体分拣机构、所述泥土传送机构、所述果体存放盒体、所述根茎破碎机构和所述根茎存放盒体都安装在所述底座上。
14.更具体地,在所述智能化花生采集农机系统中:
15.所述根茎挖掘机构采用最深挖掘深度低于设定深度阈值的挖掘模式执行对前方花生种植区域的根茎挖掘处理,以获得带土以及带果实的花生根茎。
16.更具体地,在所述智能化花生采集农机系统中:
17.所述振动传输机构设置在所述根茎挖掘机构和所述果体分拣机构之间,用于传输带土以及带果实的花生根茎。
18.更具体地,在所述智能化花生采集农机系统中,所述系统还包括:
19.视觉采集器件,设置在所述花生采集农机的前端,用于在所述振动传输机构工作时,完成对前方花生种植区域的视觉数据采集,以获得种植区域图像;
20.叶体识别器件,与所述视觉采集器件连接,用于根据花生单片叶体的边缘形状识别所述种植区域图像中每一个叶体对象所在的图像分块;
21.黄色检测器件,与所述叶体识别器件连接,用于获取所述种植区域图像中每一个叶体对象占据的多个像素点,并将所述种植区域图像中所有叶体对象占据的像素点构成单个像素点集合,获得所述单个像素点集合的各个像素点分别对应的各个黄色分量数值;
22.数据解析器件,与所述黄色检测器件连接,用于接收所述各个黄色分量数值,将去除最值后剩余的多个黄色分量数值中出现频率最频繁的黄色分量数值作为典型分量数值;
23.收获判断器件,与所述数据解析器件连接,用于基于接收到的典型分量数值确定发出使能收获信号或禁止收获信号;
24.其中,基于接收到的典型分量数值确定发出使能收获信号或禁止收获信号包括:所述典型分量数值与255的差值小于等于预设差值限量时,判断前方花生种植区域各个叶体整体趋黄,并发出使能收获信号;
25.其中,获取所述种植区域图像中每一个叶体对象占据的多个像素点,并将所述种植区域图像中所有叶体对象占据的像素点构成单个像素点集合,获得所述单个像素点集合的各个像素点分别对应的各个黄色分量数值包括:所述黄色分量数值为cmyk空间下的y分量数值;
26.其中,所述果体分拣机构用于接收带土以及带果实的花生根茎,并执行果体分拣动作,以获得分置的泥土、果实和花生根茎。
27.本发明的智能化花生采集农机系统运用广泛、具有一定的针对性。由于引入了针对性设计的泥土、果实和根茎分拣机制,同时采用了叶体整体视觉分析机制对待收获的花生种植区域的花生成熟程度执行整体判断,从而避免收获果实成熟度不足。
附图说明
28.以下将结合附图对本发明的实施方案进行描述,其中:
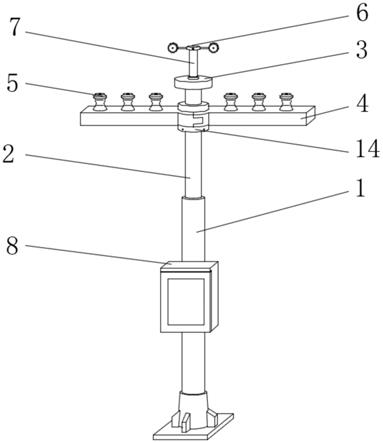
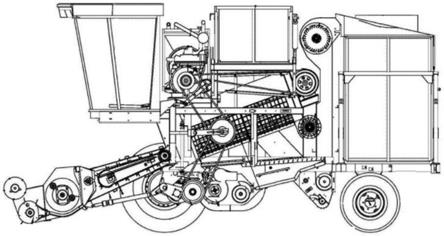
29.图1为根据本发明实施方案示出的智能化花生采集农机系统的花生采集农机的外形结构示意图。
具体实施方式
30.下面将参照附图对本发明的智能化花生采集农机系统的实施方案进行详细说明。
[0031]“智慧农业”能够有效改善农业生态环境。将农田、畜牧养殖场、水产养殖基地等生产单位和周边的生态环境视为整体,并通过对其物质交换和能量循环关系进行系统、精密运算,保障农业生产的生态环境在可承受范围内,如定量施肥不会造成土壤板结,经处理排放的畜禽粪便不会造成水和大气污染,反而能培肥地力等。
[0032]“智慧农业”能够显著提高农业生产经营效率。基于精准的农业传感器进行实时监测,利用云计算、数据挖掘等技术进行多层次分析,并将分析指令与各种控制设备进行联动完成农业生产、管理。这种智能机械代替人的农业劳作,不仅解决了农业劳动力日益紧缺的问题,而且实现了农业生产高度规模化、集约化、工厂化,提高了农业生产对自然环境风险的应对能力,使弱势的传统农业成为具有高效率的现代产业。
[0033]
当前,在采用农业化机械执行对花生种植区域的花生果实的收获操作中存在以下两处问题:第一个问题是,通过挖掘花生种植区域获得的混合物包括泥土、果实和根茎,即使在前端执行振动皮带的振动处理,去除了少量的泥土,但无法完全去除泥土,导致上述三种物体的分拣较为困难;第二个问题是,不同花生种植区域的生长状况不同,对整体偏绿的花生秧体强行收获,必然导致收获产品质量不佳。
[0034]
为了克服上述不足,本发明搭建了一种智能化花生采集农机系统,能够有效解决相应的技术问题。
[0035]
图1为根据本发明实施方案示出的智能化花生采集农机系统的花生采集农机的外形结构示意图。
[0036]
根据本发明实施方案示出的智能化花生采集农机系统包括:
[0037]
花生采集农机,包括根茎挖掘机构、振动传输机构、果体分拣机构、泥土传送机构、果体存放盒体、根茎破碎机构、根茎存放盒体、底座、单个转向轮体以及一对随动轮体;
[0038]
其中,所述单个转向轮体设置在所述一对随动轮体的前方,所述单个转向轮体以及所述一对随动轮体都设置在所述底座的下方。
[0039]
接着,继续对本发明的智能化花生采集农机系统的具体结构进行进一步的说明。
[0040]
所述智能化花生采集农机系统中:
[0041]
所述根茎挖掘机构、所述振动传输机构、所述果体分拣机构、所述泥土传送机构、所述果体存放盒体、所述根茎破碎机构和所述根茎存放盒体都安装在所述底座上。
[0042]
所述智能化花生采集农机系统中:
[0043]
所述根茎挖掘机构采用最深挖掘深度低于设定深度阈值的挖掘模式执行对前方花生种植区域的根茎挖掘处理,以获得带土以及带果实的花生根茎。
[0044]
所述智能化花生采集农机系统中:
[0045]
所述振动传输机构设置在所述根茎挖掘机构和所述果体分拣机构之间,用于传输带土以及带果实的花生根茎。
[0046]
所述智能化花生采集农机系统中还可以包括:
[0047]
视觉采集器件,设置在所述花生采集农机的前端,用于在所述振动传输机构工作时,完成对前方花生种植区域的视觉数据采集,以获得种植区域图像;
[0048]
叶体识别器件,与所述视觉采集器件连接,用于根据花生单片叶体的边缘形状识
别所述种植区域图像中每一个叶体对象所在的图像分块;
[0049]
黄色检测器件,与所述叶体识别器件连接,用于获取所述种植区域图像中每一个叶体对象占据的多个像素点,并将所述种植区域图像中所有叶体对象占据的像素点构成单个像素点集合,获得所述单个像素点集合的各个像素点分别对应的各个黄色分量数值;
[0050]
数据解析器件,与所述黄色检测器件连接,用于接收所述各个黄色分量数值,将去除最值后剩余的多个黄色分量数值中出现频率最频繁的黄色分量数值作为典型分量数值;
[0051]
收获判断器件,与所述数据解析器件连接,用于基于接收到的典型分量数值确定发出使能收获信号或禁止收获信号;
[0052]
其中,基于接收到的典型分量数值确定发出使能收获信号或禁止收获信号包括:所述典型分量数值与255的差值小于等于预设差值限量时,判断前方花生种植区域各个叶体整体趋黄,并发出使能收获信号;
[0053]
其中,获取所述种植区域图像中每一个叶体对象占据的多个像素点,并将所述种植区域图像中所有叶体对象占据的像素点构成单个像素点集合,获得所述单个像素点集合的各个像素点分别对应的各个黄色分量数值包括:所述黄色分量数值为cmyk空间下的y分量数值;
[0054]
其中,所述果体分拣机构用于接收带土以及带果实的花生根茎,并执行果体分拣动作,以获得分置的泥土、果实和花生根茎。
[0055]
所述智能化花生采集农机系统中:
[0056]
基于接收到的典型分量数值确定发出使能收获信号或禁止收获信号还包括:所述典型分量数值与255的差值大于所述预设差值限量时,判断前方花生种植区域各个叶体整体趋绿,并发出禁止收获信号。
[0057]
所述智能化花生采集农机系统中:
[0058]
所述果体分拣机构用于接收带土以及带果实的花生根茎,并执行果体分拣动作,以获得分置的泥土、果实和花生根茎包括:所述果体分拣机构基于泥土、果实和花生根茎的比重的不同完成果体分拣动作,以获得分置的泥土、果实和花生根茎。
[0059]
所述智能化花生采集农机系统中:
[0060]
所述果体分拣机构用于接收带土以及带果实的花生根茎,并执行果体分拣动作,以获得分置的泥土、果实和花生根茎包括:所述果体分拣机构基于泥土、果实和花生根茎的粘度的不同以及比重的不同完成果体分拣动作,以获得分置的泥土、果实和花生根茎。
[0061]
所述智能化花生采集农机系统中:
[0062]
每一个像素点在cmyk空间下具有y分量数值、c分量数值、m分量数值以及k分量数值。
[0063]
所述智能化花生采集农机系统中:
[0064]
采用最深挖掘深度低于设定深度阈值的挖掘模式执行对前方花生种植区域的根茎挖掘处理,以获得带土以及带果实的花生根茎包括:所述设定深度阈值等于小于10厘米。
[0065]
另外,在所述智能化花生采集农机系统中,所述泥土传送机构在每一次启动后空转设定数目周期后才启动接收带土以及带果实的花生根茎;
[0066]
以及在所述智能化花生采集农机系统中,所述泥土传送机构在每一次启动后空转设定数目周期后才启动接收带土以及带果实的花生根茎包括:在所述泥土传送机构空转期
间,所述根茎挖掘机构不执行对前方花生种植区域的根茎挖掘处理。
[0067]
虽然已对本发明的某较佳实施进行了展示和详述,但应理解,可以对其进行各种改变和调整而不脱离所附权利要求的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。