1.本发明属于光学元件精密测量技术领域,涉及惯性约束聚变装置中高功率激光驱动器中的倍频晶体元件相位匹配方向的精确测量,具体涉及一种激光倍频晶体相位匹配方向的快速测量系统及测量方法。
背景技术:
2.激光倍频是利用非线性晶体在强激光作用下产生的二次非线性效应,将入射激光的频率变为原来的两倍。在惯性约束聚变装置中,为了提高靶丸对激光能量的吸收效率,通常需要对激光进行倍频,而对激光进行二倍频操作的过程通常由大口径kdp(磷酸二氢钾)晶体来实现。在实际应用中,通过特殊的切割方式,可以在理论上保证垂直于晶体表面的方向是二倍频效率最高的方向,即相位匹配方向。然而由于晶体生长过程、加工过程和装配过程都会导致晶体内部光学均匀性和表面精度发生变化,从而导致局部的相位匹配方向发生变化,因此在实际使用之前,需要测量每块kdp晶体的相位匹配方向。
3.我国传统的测量kdp晶体相位匹配方向的方法为使用线激光作为基频激光,通过调整kdp晶体的俯仰和偏摆角度来改变出射的二倍频激光的强度。二倍频激光光强最强时对应的kdp晶体的姿态即为晶体的相位匹配方向。该测量方法不仅操作繁琐,耗费时间,而且很难准确判断二倍频激光什么时候最强,导致测量结果存在一定的偏差。因此改进kdp晶体相位匹配角度的测量过程有很大的重要性和必要性。
技术实现要素:
4.有鉴于此,本公开实施例提供一种激光倍频晶体相位匹配方向的快速测量系统及方法,至少部分解决现有技术中存在的问题。
5.第一方面,本公开实施例提供了一种激光倍频晶体相位匹配方向的快速测量方法,所述方法包括:
6.将入射激光束整形为锥形激光束;
7.以所述锥形激光束照射所述激光倍频晶体;
8.获取从所述激光倍频晶体出射的出射激光光斑,其中所述出射激光光斑包含中心条纹;以及
9.基于所述中心条纹距离所述出射激光光斑中心的距离获取所述激光倍频晶体相位匹配方向。
10.根据本公开实施例的一种具体实现方式,在以所述锥形激光束照射所述激光倍频晶体的步骤之后,所述方法还包括:
11.基于原始光斑尺寸、光束发散角、以及光束发散距离计算所述锥形激光束在所述激光倍频晶体表面上光斑的尺寸,其中所述原始光斑尺寸指示从激光器中出射的光斑的尺寸,所述光束发散角指示所述锥形激光束的发散角,并且所述光束发散距离指示所述平凹透镜后表面到所述激光倍频晶体表面的尺寸。
12.根据本公开实施例的一种具体实现方式,所述基于所述中心条纹距离所述出射激光光斑中心的距离获取所述激光倍频晶体相位匹配方向的步骤,包括:
13.基于所述距离、所述锥形激光束的发散角、所述光斑的尺寸、所述入射激光束在所述激光倍频晶体中的折射率、所述出射激光在所述激光倍频晶体中的折射率以及所述激光倍频晶体与所述出射激光光斑之间的距离,获取所述激光倍频晶体相位匹配方向。
14.根据本公开实施例的一种具体实现方式,根据下式获取所述激光倍频晶体相位匹配方向:
[0015][0016]
其中,r是所述原始光斑扩束后的尺寸半径,l1是平凹透镜与倍频晶体前表面之间的距离,α是所述锥形激光束的发散角,β是所述入射激光束入射到所述激光倍频晶体上时的入射角度,γ是所述入射激光束的折射角度,δ是所述出射激光的出射角度,no是所述入射激光束在所述激光倍频晶体中的折射率,ne是所述出射激光在所述激光倍频晶体中的折射率,d
kdp
是所述激光倍频晶体的厚度。l2是所述激光倍频晶体与所述出射激光光斑之间的距离。
[0017]
根据本公开实施例的一种具体实现方式,所述方法还包括:
[0018]
当所述中心条纹位于所述出射激光光斑中心的下方时,逆时针旋转所述激光倍频晶体以获取相位匹配方向;并且
[0019]
当所述中心条纹位于所述出射激光光斑中心的上方时,顺时针旋转所述激光倍频晶体以获取相位匹配方向。
[0020]
第二方面,提供了一种激光倍频晶体相位匹配方向的快速测量系统,所述系统包括:
[0021]
激光器(3),被配置为发射入射激光束;
[0022]
平凹透镜(6),被配置为将所述入射激光束整形为锥形激光束;
[0023]
激光倍频晶体(7),所述锥形激光束照射所述激光倍频晶体(7);以及
[0024]
面阵相机(11),被配置为获取从所述激光倍频晶体(7)出射的出射激光光斑,其中所述出射激光光斑包含中心条纹;以及
[0025]
处理器,被配置为基于所述中心条纹距离所述出射激光光斑中心的距离获取所述激光倍频晶体(7)的相位匹配方向。
[0026]
根据本公开实施例的一种具体实现方式,所述系统还包括:
[0027]
扩束器(4),被配置为使得所述入射激光束的直径扩大;
[0028]
光束整形器(5),用于将从所述扩束器(4)中出射的光束整形成平顶光束,并且所述平凹透镜(6)用于将光束整形器(5)的出射光束变为锥形光束;
[0029]
滤光片(9),用于过滤从所述激光倍频晶体(7)出射的基频激光;以及
[0030]
衰减片(10),用于减小入射到面阵相机(11)激光的光强。
[0031]
根据本公开实施例的一种具体实现方式,所述系统还包括:
[0032]
气浮光学平台(1);
[0033]
垫板(2),高功率激光器(3)、扩束器(4)、光束整形器(5)和平凹透镜(6)被依次设置于垫块(2);
[0034]
二维移动平台(8),所述激光倍频晶体(7)被设置于所述二维移动平台(8);以及
[0035]
垫板(12),所述滤光片(9)、衰减片(10)、面阵相机(11)被设置于所述垫板(12)之上,其中
[0036]
所述垫板(2)、所述二维移动平台(8)和所述垫板(12)被设置于所述气浮光学平台(1)之上。
[0037]
根据本公开实施例的一种具体实现方式,所述率激光器(3)为波长是1053nm的固体激光器。
[0038]
根据本公开实施例的一种具体实现方式,所述平凹透镜(6)用于将光束整形器(5)的出射光束变为具有5mrad发散角的锥形光束。
[0039]
根据本公开实施例的一种具体实现方式,所述面阵相机(11)的感光芯片尺寸为12.3mm
×
12.3mm,分辨率为20.2mp,水平和垂直像素尺寸为2.74μm
×
2.74μm。
[0040]
第三方面,本公开实施例还提供了一种电子设备,该电子设备包括:
[0041]
至少一个处理器;以及,
[0042]
与该至少一个处理器通信连接的存储器;其中,
[0043]
该存储器存储有可被该至少一个处理器执行的指令,该指令被该至少一个处理器执行,以使该至少一个处理器能够执行前述第一方面或第一方面的任一实现方式中的激光倍频晶体相位匹配方向的快速测量方法。
[0044]
第四方面,本公开实施例还提供了一种非暂态计算机可读存储介质,该非暂态计算机可读存储介质存储计算机指令,该计算机指令用于使该计算机执行前述第一方面或第一方面的任一实现方式中的激光倍频晶体相位匹配方向的快速测量方法。
[0045]
第五方面,本公开实施例还提供了一种计算机程序产品,该计算机程序产品包括存储在非暂态计算机可读存储介质上的计算程序,该计算机程序包括程序指令,当该程序指令被计算机执行时,使该计算机执行前述第一方面或第一方面的任一实现方式中的激光倍频晶体相位匹配方向的快速测量方法。
[0046]
本公开实施例中的激光倍频晶体相位匹配方向的快速测量方法包括:将入射激光束整形为锥形激光束;以所述锥形激光束照射所述激光倍频晶体;获取从所述激光倍频晶体出射的出射激光光斑,其中所述出射激光光斑包含中心条纹;以及基于所述中心条纹距离所述出射激光光斑中心的距离获取所述激光倍频晶体相位匹配方向。通过本公开的处理方案,操作简单,耗费短,且能够准确测量激光倍频晶体相位匹配方向。
附图说明
[0047]
为了更清楚地说明本公开实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本公开的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
[0048]
图1是本发明大口径激光倍频晶体相位匹配方向快速测量系统整体结构图。
[0049]
图2(a)是本发明大口径激光倍频晶体相位匹配方向快速测量系统的正视图。
[0050]
图2(b)是最佳相位匹配角度计算参数示意图。
[0051]
图3是本发明大口径激光倍频晶体相位匹配方向快速测量系统面阵相机上看到的光斑强度分布的模拟图。
[0052]
图4是本发明大口径激光倍频晶体相位匹配方向快速测量系统的原理示意图。
[0053]
图5是本发明激光倍频晶体相位匹配方向的快速测量方法的流程图。
[0054]
图6是本发明激光倍频晶体相位匹配方向的快速测量系统的示意图。
具体实施方式
[0055]
下面结合附图对本公开实施例进行详细描述。
[0056]
以下通过特定的具体实例说明本公开的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本公开的其他优点与功效。显然,所描述的实施例仅仅是本公开一部分实施例,而不是全部的实施例。本公开还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本公开的精神下进行各种修饰或改变。需说明的是,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。基于本公开中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本公开保护的范围。
[0057]
需要说明的是,下文描述在所附权利要求书的范围内的实施例的各种方面。应显而易见,本文中所描述的方面可体现于广泛多种形式中,且本文中所描述的任何特定结构及/或功能仅为说明性的。基于本公开,所属领域的技术人员应了解,本文中所描述的一个方面可与任何其它方面独立地实施,且可以各种方式组合这些方面中的两者或两者以上。举例来说,可使用本文中所阐述的任何数目个方面来实施设备及/或实践方法。另外,可使用除了本文中所阐述的方面中的一或多者之外的其它结构及/或功能性实施此设备及/或实践此方法。
[0058]
还需要说明的是,以下实施例中所提供的图示仅以示意方式说明本公开的基本构想,图式中仅显示与本公开中有关的组件而非按照实际实施时的组件数目、形状及尺寸绘制,其实际实施时各组件的型态、数量及比例可为一种随意的改变,且其组件布局型态也可能更为复杂。
[0059]
另外,在以下描述中,提供具体细节是为了便于透彻理解实例。然而,所属领域的技术人员将理解,可在没有这些特定细节的情况下实践所述方面。
[0060]
从满足激光惯性约束聚变装置对大口径激光倍频晶体相位匹配角度测量的快速性和准确性的需求出发,本发明提出了一种激光倍频晶体相位匹配角度快速测量系统及方法。
[0061]
下面结合附图对本发明作进一步详细说明。
[0062]
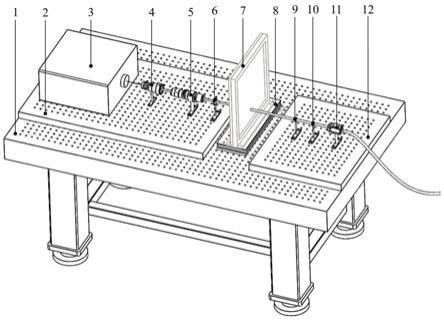
首先,参考图1和图2(a),描述本发明实施例的激光倍频晶体相位匹配角度快速测量系统,如图1所示,该系统包括气浮光学平台1、垫板2、高功率激光器3、扩束器4、光束整形器5、平凹透镜6、kdp晶体7、二维移动平台8、滤光片9、衰减片10、面阵相机11和垫块12。
[0063]
在本发明实施例中,气浮光学平台1是整个快速测量系统的基础,主要用于隔离各种振动,气浮光学平台1的台面尺寸可以为1400mm
×
800mm
×
100mm,并且材料为不锈钢。
[0064]
垫块2被设置于气浮光学平台1之上,其作用是调节系统中光学元件的高度,具体地,高功率激光器3、扩束器4、光束整形器5、平凹透镜6被依次设置于垫块2。在本发明实施
例中,垫块2的尺寸为800mm
×
500mm
×
30mm,材料为不锈钢。
[0065]
高功率激光器3可以为波长例如是1053nm的固体激光器,在本发明实施例中,其输出功率为1~1000mw,输出光斑直径为1.5mm。
[0066]
扩束器4用于将从高功率激光器3出射激光的直径扩大,在本发明实施例中,入射孔径为5mm,出射孔径为10mm,扩束倍率为4,从而将所述高功率激光器3出射激光的直径扩大到6mm。
[0067]
光束整形器5用于将从扩束器4中出射的高斯光束整形成平行光束,光强均匀度小于5%。
[0068]
平凹透镜6用于将光束整形器5的出射光束变为具有5mrad(0.005rad)发散角的锥形光束,以使激光束在入射到kdp晶体7上时,整个光束的入射角度能在-5mrad和5mrad之间连续分布。
[0069]
kdp晶体7用以实现激光的倍频效应,也是待测量的对象,其被设置于二维移动平台8之上,其尺寸可以为工程应用中的实际大小,即410mm
×
410mm
×
12.6mm。
[0070]
二维移动平台8,其整体尺寸为375mm
×
125mm
×
40mm,可以在平行和垂直于气浮光学平台1的两个方向上移动,移动精度可达0.1mm,用于调节激光照射在kdp晶体7上的位置,便于测量kdp晶体7不同位置的相位匹配方向。
[0071]
滤光片9用于过滤1053nm的基频光,而通过波长为526.5nm的二倍频光,便于后续对二倍频光进行测量,其外形尺寸为φ12.5mm,有效孔径大于90%,透射带为350nm~560nm,截止带为590nm~850nm,透过率大于90%。
[0072]
所述衰减片10用于减小入射到面阵相机1激光的光强,以免损伤相机,其外形尺寸为φ12.5mm,有效孔径大于90%,光强透过率t=0.1,适用波长范围400nm-700nm。
[0073]
面阵相机11,其感光芯片尺寸为12.3mm
×
12.3mm,分辨率为20.2mp,水平和垂直像素尺寸为2.74μm
×
2.74μm。对于本测量系统,它能够分辨出10μrad角度变化带来的光斑光强的变化,足以满足工程应用中对测量精度的要求。
[0074]
垫板12用于调节光学元件的高度并且被设置于气浮光学平台1,并且滤光片9、衰减片10、面阵相机11被设置于垫板12之上以调整高度,其尺寸为500mm
×
400mm
×
30mm,材料为不锈钢。
[0075]
在实际的测量过程中,在面阵相机11中会得到光斑图像,并且可以得到其中最亮的一条光线与光斑中心的间距d,根据光学系统中的其他物理参数,可以得到本次测量中kdp晶体7的最佳相位匹配角度,其计算公式为:
[0076][0077]
其中,r是扩束器4中出射激光的光斑尺寸,l1是平凹透镜6与kdp晶体7前表面之间的距离,α是激光束通过平凹透镜6后的发散角,β是基频激光入射到kdp晶体7上时的入射角度,γ是基频激光进入kdp晶体7后的折射角度,δ是二倍频激光从kdp晶体7内出射时的出射角度。no是基频光在kdp晶体7内传播时的折射率,ne是二倍频光在kdp晶体7内传播时的折射率。d
kdp
是kdp晶体的厚度。l2是面阵相机11的镜头与kdp晶体7后表面之间的距离(参见图2(b))。
[0078]
在满足5级洁净要求(根据iso14644-1标准)的光学精密测量环境中,具体执行如下步骤:
[0079]
步骤1:将垫板2固定到气浮光学平台1上,使其左端面与气浮光学平台1的左端面重合;
[0080]
步骤2:将高功率激光器3通过底座上的螺纹孔固定到垫板2上;
[0081]
步骤3:将扩束器4安装到支撑架上,并通过支撑架上的螺纹孔将其固定到垫板2上,与高功率激光器3的间距为125mm。调整支撑架的高度,使扩束器4的轴心与高功率激光器3出光口的轴心重合;
[0082]
步骤4:将光束整形器5安装到支撑架上,并通过支撑架上的螺纹孔将其固定到垫板2上,其底座与扩束器3底座的间距为175mm。调整支撑架的高度,使光束整形器5的轴心与扩束器4的轴心重合;
[0083]
步骤5:将平凹透镜6安装到支撑架上,并通过支撑架上的螺纹孔将其固定到垫板2上,其底座与光束整形器4底座的间距为100mm。调整支撑架的高度,使平凹透镜5的轴心与光束整形器4的轴心重合;
[0084]
步骤6:将kdp晶体7安装到支撑架上,并通过支撑架上的螺纹孔将其固定到二维移动平台8上,将二维移动平台8安装到气浮光学平台1上,保持kdp晶体7的前表面与平凹透镜6的平面之间的距离为100mm,此时kdp晶体上光斑的半径为3.5mm。
[0085]
步骤7:将垫板12固定到气浮光学平台1上,使其右端面与气浮光学平台1的右端面重合;
[0086]
步骤8:将滤光片9安装到支撑架上,并通过支撑架上的螺纹孔将其固定到垫板12上。调整支撑架的高度,使滤光片9的轴心与平凹透镜6的轴心重合。滤光片9与kdp晶体7后表面之间的距离为100mm;
[0087]
步骤9:将衰减片10安装到支撑架上,并通过支撑架上的螺纹孔将其固定到垫板12上,使衰减片10的底座和滤光片9底座之间的距离为75mm。调整支撑架的高度,使衰减片10的轴心与滤光片9的轴心重合;
[0088]
步骤10:将面阵相机11安装到支撑架上,并通过支撑架上的螺纹孔固定到垫板12上,使面阵相机11的底座与衰减10的底座之间的距离为100mm。调整支撑架的高度,使面阵相机11镜头的轴心与衰减片10的轴心重合;此时面阵相机11的镜头与kdp晶体7后表面的距离为255mm;
[0089]
步骤11:打开与面阵相机9相连的电脑上的配套软件,准备观察出射光斑的光强分布;
[0090]
步骤12:打开高功率激光器3的开关,将功率调节到在步骤9所提配套软件中能清晰地观察到光斑时停止;这时在屏幕上可以看到一个近乎圆形的光斑(参见图3),这个光斑由许多亮度不同的横向条纹构成。其中有一条横向条纹最亮,在它两侧的条纹以它为对称中心,随着距离的增加亮度依次降低。当相位失配角度(即相位匹配时kdp晶体需要调整的角度,以逆时针方向为正方向)为正时,最亮条纹在光斑中心的下方;当相位失配角度为负时,最亮条纹在光斑中心的上方;当不存在相位失配时,最亮条纹经过光斑中心点。
[0091]
步骤13:根据电脑上观察到的光斑,计算光斑中最亮的线与光斑中心的垂直距离d,此时kdp晶体6的最佳相位匹配角度可以通过以下公式获得:
[0092][0093]
其中,数值3是扩束器4中出射光斑的尺寸半径,100是平凹透镜6与kdp晶体7前表面之间的距离,β是基频激光入射到kdp晶体7上时的入射角度,γ是基频激光进入kdp晶体7后的折射角度,δ是二倍频激光从kdp晶体7内出射时的出射角度。数值1.4941是基频光在kdp晶体7内传播时的折射率,数值1.4707是二倍频光在kdp晶体7内传播时的折射率。数值12.6是kdp晶体的厚度。数值255是面阵相机11的镜头与kdp晶体7后表面之间的距离。β就是晶体的相位匹配角度。
[0094]
以上,具体描述了本发明实施例,接下来,参考图4-图6,描述本发明的一般实施例。
[0095]
首先,参考图4,描述本发明一般实施例的激光倍频晶体相位匹配方向的快速测量方法,所述方法包括:
[0096]
s401:将入射激光束整形为锥形激光束。
[0097]
s402:以所述锥形激光束照射所述激光倍频晶体。
[0098]
s403:获取从所述激光倍频晶体出射的出射激光光斑,其中所述出射激光光斑包含中心条纹。
[0099]
s404:基于所述中心条纹距离所述出射激光光斑中心的距离获取所述激光倍频晶体相位匹配方向。
[0100]
以上各个步骤的具体实现方式和操作,可以参见以上参考图1-图3进行的描述,在此不再赘述。
[0101]
参考图5,根据本公开实施例的一种具体实现方式,在以所述锥形激光束照射所述激光倍频晶体的步骤s402之后,所述方法还包括:
[0102]
s501:获取所述锥形激光束在所述激光倍频晶体表面上光斑的尺寸。
[0103]
根据本公开实施例的一种具体实现方式,所述基于所述中心条纹距离所述出射激光光斑中心的距离获取所述激光倍频晶体相位匹配方向的步骤,包括:
[0104]
基于所述距离、所述锥形激光束的发散角、所述光斑的尺寸、所述入射激光束在所述激光倍频晶体中的折射率、所述出射激光在所述激光倍频晶体中的折射率以及所述激光倍频晶体与所述出射激光光斑之间的距离,获取所述激光倍频晶体相位匹配方向。
[0105]
并且具体可以根据下式获取所述激光倍频晶体相位匹配方向:
[0106][0107]
其中,r是所述原始光斑经过扩束之后的尺寸半径,l1是平凹透镜6与kdp晶体7前表面之间的距离,β是所述入射激光束入射到所述激光倍频晶体上时的入射角度,γ是所述入射激光束的折射角度,δ是所述出射激光的出射角度,是所述入射激光束在所述激光倍频晶体中的折射率,是所述出射激光在所述激光倍频晶体中的折射率,是所述激光倍频晶体的厚度。l2是所述激光倍频晶体与所述出射激光光斑之间的距离。
[0108]
根据本公开实施例的一种具体实现方式,所述方法还包括:
[0109]
当所述中心条纹位于所述出射激光光斑中心的下方时,逆时针旋转所述激光倍频晶体以获取相位匹配方向;并且
[0110]
当所述中心条纹位于所述出射激光光斑中心的上方时,顺时针旋转所述激光倍频晶体以获取相位匹配方向。
[0111]
参考图6,本发明提供了一种激光倍频晶体相位匹配方向的快速测量系统,所述系统包括:
[0112]
激光器3,被配置为发射入射激光束;
[0113]
平凹透镜6,被配置为将所述入射激光束整形为锥形激光束;
[0114]
激光倍频晶体7,所述锥形激光束照射所述激光倍频晶体7;以及
[0115]
面阵相机11,被配置为获取从所述激光倍频晶体7出射的出射激光光斑,其中所述出射激光光斑包含中心条纹;以及
[0116]
处理器,被配置为基于所述中心条纹距离所述出射激光光斑中心的距离获取所述激光倍频晶体7的相位匹配方向。
[0117]
激光倍频晶体相位匹配方向的快速测量系统的各个部分可以参见以上参考图1-图2的描述,在此不再赘述。
[0118]
根据本公开实施例的一种具体实现方式,所述系统还包括:
[0119]
扩束器4,被配置为使得所述入射激光束的直径扩大;
[0120]
光束整形器5,用于将从所述扩束器4中出射的光束整形成平行光束,并且所述平凹透镜6用于将光束整形器5的出射光束变为锥形光束;
[0121]
滤光片9,用于过滤从所述激光倍频晶体7出射的出射激光;以及
[0122]
衰减片10,用于减小入射到面阵相机11激光的光强。
[0123]
根据本公开实施例的一种具体实现方式,所述系统还包括:
[0124]
气浮光学平台1;
[0125]
垫板2,高功率激光器3、扩束器4、光束整形器5和平凹透镜6被依次设置于垫块2;
[0126]
二维移动平台8,所述激光倍频晶体7被设置于所述二维移动平台8;以及
[0127]
垫板12,所述滤光片9、衰减片10、面阵相机11被设置于所述垫板12之上,其中
[0128]
所述垫板2、所述二维移动平台8和所述垫板12被设置于所述气浮光学平台1。
[0129]
根据本公开实施例的一种具体实现方式,所述率激光器3为波长是1053nm的固体激光器。
[0130]
根据本公开实施例的一种具体实现方式,所述平凹透镜6用于将光束整形器5的出射光束变为具有5mrad发散角的锥形光束。
[0131]
根据本公开实施例的一种具体实现方式,所述面阵相机11的感光芯片尺寸为12.3mm
×
12.3mm,分辨率为20.2mp,水平和垂直像素尺寸为2.74μm
×
2.74μm。
[0132]
本公开实施例还提供了一种电子设备,该电子设备包括:
[0133]
至少一个处理器;以及,
[0134]
与该至少一个处理器通信连接的存储器;其中,
[0135]
该存储器存储有可被该至少一个处理器执行的指令,该指令被该至少一个处理器执行,以使该至少一个处理器能够执行前述的激光倍频晶体相位匹配方向的快速测量方
法。
[0136]
第四方面,本公开实施例还提供了一种非暂态计算机可读存储介质,该非暂态计算机可读存储介质存储计算机指令,该计算机指令用于使该计算机执行前述的激光倍频晶体相位匹配方向的快速测量方法。
[0137]
第五方面,本公开实施例还提供了一种计算机程序产品,该计算机程序产品包括存储在非暂态计算机可读存储介质上的计算程序,该计算机程序包括程序指令,当该程序指令被计算机执行时,使该计算机执行前述的激光倍频晶体相位匹配方向的快速测量方法。
[0138]
本公开实施例中的激光倍频晶体相位匹配方向的快速测量方法包括:将入射激光束整形为锥形激光束;以所述锥形激光束照射所述激光倍频晶体;获取从所述激光倍频晶体出射的出射激光光斑,其中所述出射激光光斑包含中心条纹;以及基于所述中心条纹距离所述出射激光光斑中心的距离获取所述激光倍频晶体相位匹配方向。通过本公开的处理方案,操作简单,耗费短,且能够准确测量激光倍频晶体相位匹配方向。
[0139]
以上所述,仅为本公开的具体实施方式,但本公开的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本公开揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本公开的保护范围之内。因此,本公开的保护范围应以权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。