1.本发明涉及于高超声速试验风洞技术领域,尤其涉及一种高超声速变马赫数风洞的参数调节装置及方法。
背景技术:
2.随着超声速飞行器,特别是高超声速飞行器技术研究的发展,高超声速风洞作为高超声速飞行器地面试验研究的主体设备,得到越来越多的关注。燃烧型高超声速变马赫数风洞是一种利用燃料与氧化剂燃烧的方式将空气加速到高超声速的试验装置,该装置通过燃料、氧化剂流量以及风洞喷管喉道大小等工作参数的连续改变,实现出口气流速度、流量、总温和总压等参数的连续变化,用于开展高超声速飞行器技术研究。
3.现有燃烧型高超声速风洞通常采用减压器或压力调节阀 固定喉道文氏管的方式控制气体供应流量,其工作原理是通过控制固定喉道文氏管上游的压力,实现对流经气体流量的控制。减压器方案对于加热器气体流量不变是可以满足需求的,而对于变马赫数风洞而言,其固定的压力输出无法实现气体流量的动态变化。对于调节阀方案,通过采集调节阀下游气体压力与压力设定值进行比较,利用 pid等控制方式,动态调整调节阀开度,实现阀门下游压力的稳定。对于高超声速变马赫数风洞中的各工作介质变参数调节条件下,调节阀出口压力需要随着气体流量的变化不停地调整调节阀的开度,特别是当流量变化范围较大时,容易造成压力调节的超调或滞后,导致出口压力的震荡,影响流量控制精度。另一方面,对于风洞出口气流马赫数、温度、总压和流量等参数的变化,不仅仅要考虑工作介质流量大小以及喷管尺寸的变化过程,还要考虑气体的燃烧过程以及出口气流组分要求对工作介质等参数的约束问题。因此,高超声速变马赫数风洞具有非线性、多参数耦合、时滞特性和惯性环节等特点,常规的pid控制难以满足其要求,需引入自适应控制等复杂的多变量控制方法来达到其性能指标,这为高超声速风洞控制系统的设计和实现以及整个风洞运行的安全性带来了极大的挑战。
技术实现要素:
4.本发明意在提供一种高超声速变马赫数风洞的参数调节装置和调节方法,针对高超声速变马赫数风洞具有非线性、多参数耦合、时滞特性和惯性环节等特点,以解决系统控制方法比较复杂、现有的常规控制方案实现较为困难的问题。
5.为达到上述目的,本发明提供如下技术方案:
6.一种高超声速变马赫数风洞的参数调节装置,包括加热器、氢气供应管道、氧气供应管道和两个空气供应管道,一空气供应管道和氧气供应管道通过空氧混合器连接后与加热器的喷注器的富氧空气入口连通,另一空气供应管道与加热器的掺混段连通,所述氢气供应管道与加热器的喷注器氢气入口连通,所述加热器的出口连接有变马赫数喷管,所述氢气供应管道、氧气供应管道和空气供应管道均沿气体流向依次设有减压器、压力传感器、可调文氏管和截止阀。
7.本发明的另一目的,在于提供一种高超声速变马赫数风洞的参数调节方法,应用于上述的参数调节装置,包括:
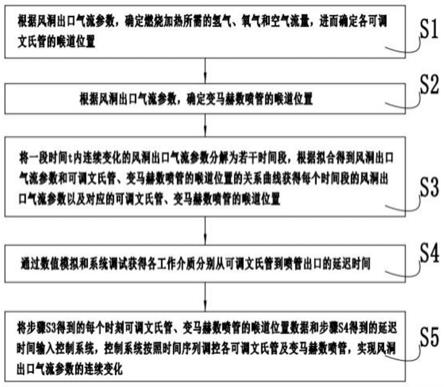
8.s1、根据风洞出口气流参数确定燃烧加热所需的氢气、氧气和空气流量,进而确定各可调文氏管的喉道位置;
9.s2、根据风洞出口气流参数确定变马赫数喷管的喉道位置;
10.s3、将一段时间t内连续变化的风洞出口气流参数分解为若干时间段,根据拟合得到风洞出口气流参数和可调文氏管、变马赫数喷管的喉道位置的关系曲线获得每个时间段的风洞出口气流参数以及对应的可调文氏管、变马赫数喷管的喉道位置;
11.s4、通过数值模拟和系统调试获得各工作介质分别从可调文氏管到喷管出口的延迟时间;
12.s5、将步骤s3得到的每个时刻可调文氏管、变马赫数喷管的喉道位置数据和步骤s4得到的延迟时间输入控制系统,控制系统按照时间序列调控各可调文氏管及变马赫数喷管,实现风洞出口气流参数的连续变化;
13.其中,p
t
为气流总压,t
t
为反应后气流温度,为气流总质量流量,ma为来流马赫数。
14.作为优选,所述步骤s1中,根据风洞出口气流参数确定燃烧加热所需的氢气、氧气和空气流量,进而确定各可调文氏管的喉道位置,包括:
15.s11、根据加热器的燃烧反应表达式,建立质量和能量守恒的方程组;
16.s12、基于质量和能量守恒的方程组,根据不同马赫数条件下反应后气流温度t
t
和气流总质量流量确定燃烧加热所需的氢气、氧气和空气流量;
17.s13、基于燃烧加热所需的氢气、氧气和空气流量,利用可调文氏管的流量计算式、可调文氏管的喉部等效面积与节流体位移表达式,确定各可调文氏管的喉道位置。
18.所述燃烧反应表达式为:
[0019][0020]
所述质量和能量守恒的方程组为:
[0021]
[0022]
所述可调文氏管的流量计算式为:
[0023][0024]
所述可调文氏管的喉部等效面积与节流体位移表达式通过标定或调试获得。
[0025]
上式中,a、b和c分别为氢气、氧气和空气的摩尔流量;t0为反应前温度;q为燃烧释热;和分别为氢气、氧气、氮气和水的摩尔质量;为氢气在反应前温度t0时的比焓;分别为氧气和氮气在反应前温度t0和反应后温度t
t
的比焓;为水蒸气在反应后温度t
t
的比焓;cd和c
*
为文氏管流出系数和临界流函数;a
th
为文氏管喉部流通面积;p0和t0分别为流入气体总压和温度;r和m分别为气体常数和气体摩尔质量。
[0026]
相比现有技术,本发明的有益效果是:
[0027]
本发明通过将出口参数的变化过程分解为多个连续变化的子过程,采用“减压阀 可调文氏管”的方式控制气体流量,并利用数学计算、系统标定的方法将将流量控制和喷管位置控制均转化为驱动机构的一系列行程控制,实现温高超声速变马赫数风洞出口气流参数的连续变化。针对燃烧型高超声速变马赫数风洞中气体流量及喷管位置控制过程中非线性、多参数耦合、时滞特性和惯性环节等特点,可以将复杂的流量和喷管位置等多变量控制问题为驱动机构的一系列行程控制,形成一种适用于高温高超声速变马赫数风洞参数的简易调节方法。该参数调节方法具有操作简单、稳定性高、可靠性强的特点,便于在燃烧型高超声速变马赫数风洞中进行工程化应用。
附图说明
[0028]
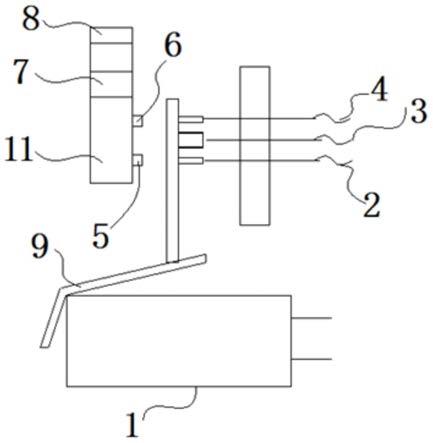
图1为本发明实施例提供的一种高超声速变马赫数风洞的参数调节装置的结构示意图;
[0029]
图2为本发明实施例提供的一种高超声速变马赫数风洞的参数调节方法的流程图;
[0030]
图3为本发明实施例提供的变马赫数风洞的可调文氏管和喷管的喉道位置曲线图;
[0031]
图4为本发明实施例提供的变马赫数风洞的加热器燃烧室压力曲线图。
具体实施方式
[0032]
下面结合附图和实施方式对本发明作进一步的详细说明:
[0033]
说明书附图中的附图标记包括:减压器1、压力传感器2、可调文氏管3、截止阀4、加热器5、变马赫数喷管6。
[0034]
如图1所示的,一种高超声速变马赫数风洞的参数调节装置,包括加热器5、氢气供应管道、氧气通道和两个空气供应管道,一空气供应管道和氧气供应管道通过空氧混合器连接后与加热器的喷注器富氧空气入口连通,另一空气供应管道与加热器的掺混段连通,氢气供应管道与加热器5的喷注器氢气入口连通,加热器5的出口连接有变马赫数喷管6,氢气供应管道、氧气供应管道和空气供应管道均沿气体流向依次设有减压器1、压力传感器2、
可调文氏管3和截止阀4。减压器1用于将高压氢气、氧气和空气压力调整到一定值,并由压力传感器2 进行测量;可调文氏管3在控制系统的控制下通过改变自身喉道大小改变气体通过流量;截止阀4用于气体的通断控制;变马赫数喷管6在控制系统的控制下通过改变喉道面积调整变马赫数喷管6出口的马赫数和总压。在减压器1的下游压力一定的条件下,通过动态调整可调文氏管3以及变马赫数喷管6喉道大小,可以实现风洞出口气流参数的变化输出。
[0035]
一种高超声速变马赫数风洞的参数调节方法,应用于上述的参数调节装置,包括:
[0036]
s1、根据风洞出口气流参数确定燃烧加热所需的氢气、氧气和空气流量,进而确定各可调文氏管的喉道位置;
[0037]
具体的,包括:
[0038]
s11、根据加热器的燃烧反应表达式,建立质量和能量守恒的方程组;
[0039]
s12、基于质量和能量守恒的方程组,根据不同马赫数条件下反应后气流温度t
t
和气流总质量流量确定燃烧加热所需的氢气、氧气和空气流量;
[0040]
s13、基于燃烧加热所需的氢气、氧气和空气流量,利用可调文氏管的流量计算式、可调文氏管的喉部等效面积与节流体位移表达式,确定各可调文氏管的喉道位置。
[0041]
燃烧反应表达式为:
[0042][0043]
质量和能量守恒的方程组为:
[0044][0045]
可调文氏管的流量计算式为:
[0046][0047]
可调文氏管的喉部等效面积与节流体位移关系通过标定或调试可以获得。本发明实施例中,经标定氧气可调文氏管喉部等效面积与节流体位移关系表达式为:
[0048]
s=-0.0094x4 0.1857x
3-0.56x2
[0049]
6.3566x 32.656(mm2)
ꢀꢀꢀꢀꢀꢀꢀ
(4)
[0050]
上式中,a、b和c分别为氢气、氧气和空气的摩尔流量;t0为反应前温度; q为燃烧释热;和分别为氢气、氧气、氮气和水的摩尔质量;为氢气在
反应前温度t0时的比焓;分别为氧气和氮气在反应前温度t0和反应后温度t
t
的比焓;为水蒸气在反应后温度t
t
的比焓;cd和c
*
为文氏管流出系数和临界流函数;a
th
为文氏管喉部流通面积;p0和t0分别为流入气体总压和温度;r和m分别为气体常数和气体摩尔质量;s可调文氏管的喉部等效面积;x为可调文氏管的节流体位移,即可调文氏管的喉道位置。
[0051]
s2、根据风洞出口气流参数通过公式(3)确定变马赫数喷管的喉道位置;
[0052]
由上可知,对于不同的出口气流参数某一状态有一组氢气、氧气、空气和掺混空气流量以及变马赫数喷管位置与之相对应。通过系统标定将气体流量控制转换为气体可调文氏管喉道位置的控制,因此出口气流参数与氢气、氧气、空气和掺混空气可调文氏管以及变马赫数喷管的喉道位置(dh,do,d
a1
,d
a2
,dn)有一一对应的关系,通过改变 (dh,do,d
a1
,d
a2
,dn)可以改变出口气流参数。
[0053]
s3、将一段时间t内连续变化的风洞出口气流参数分解为若干时间段,根据拟合得到风洞出口气流参数和可调文氏管、变马赫数喷管的喉道位置的关系曲线获得每个时间段的风洞出口气流参数以及对应的可调文氏管、变马赫数喷管的喉道位置;;
[0054]
具体的,根据将一段时间t内连续变化的气流出口参数分解为若干个时间段,每个时间段取一个时间点ti,通过曲线拟合获得 ti(i=0,1,2,...,n)时刻气流出口参数以及该时刻各调节阀文氏管、变马赫数喷管喉道位置(dh,do,d
a1
,d
a2
,dn)i。
[0055]
s4、通过数值模拟和系统调试获得各工作介质分别从可调文氏管到变马赫数喷管出口的延迟时间;
[0056]
具体的,本发明中空气和氧气、氢气等分别从不同位置注入加热器,通过数值模拟和系统调试结果获得各工作介质分别从可调文氏管到变马赫数喷管出口的延迟时间,即需要以上工作介质分别提前相应时间调节到预定值才能实现变马赫数喷管出口参数的及时响应。
[0057]
s5、将步骤s3得到的关系曲线和步骤s4得到的延迟时间输入控制系统,控制系统按照时间序列调控各可调文氏管及变马赫数喷管,实现风洞出口气流参数的连续变化;
[0058]
其中,p
t
为气流总压,t
t
为反应后气流温度,为气流总质量流量,ma为来流马赫数。
[0059]
具体的,各工作介质分别从可调文氏管到变马赫数喷管出口的延迟时间可以在控制系统中进行配置。各时刻时间/位置信息以数据表的形式存储在控制系统中,如表1所示。试验运行过程中由控制系统按照时间序列向各可调文氏管及变马赫数喷管各驱动机构发送位置控制信息,可调文氏管及变马赫数喷管按照命令位置运动,进而获得出口参数
的连续变化。
[0060]
表1变马赫数风洞参数配置表
[0061][0062]
以上所述的仅是本发明的实施例。应当指出,对于本领域的技术人员来说,在不脱离本发明技术方案的前提下,还可以作出若干变形和改进,这些也应该视为本发明的保护范围,这些都不会影响本发明实施的效果和专利的实用性。本技术要求的保护范围应当以其权利要求的内容为准,说明书中的具体实施方式等记载可以用于解释权利要求的内容。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。