1.本实用新型涉及的是一种下料机构,具体涉及一种灯板的自动下料机构。
背景技术:
2.现有下料为人工从测试机取出并搬运到料车,整个过程依靠人力观察测试结果的信号状态、取料、搬运、人工扫码区分并放置物料。完全依靠人力进行载具上产品的ok/ng进行判别,并依据判别结果对载具进行对应位置存放。需要操作人员仔细记录对应载具的产品ok/ng与否,进行分别搬运、存放。容易导致操作人员的疲劳、放置错误的概率极大而且效率低下。
技术实现要素:
3.针对现有技术上存在的不足,本实用新型目的是在于提供一种灯板的自动下料机构,四轴机器人与直线电机模组的配合,使搬运的速度大幅度提升。四轴机器人的本身柔性化这一优点加上直线电机作为第五轴,增加了整体结构在空间狭小的范围里的操作便利性,以及更节约整体设备的地面使用率。四轴机器人夹爪与传感器信号结合,使机器人将不同的产品对应搬运并存放的指定的区域,准确率极高。以及机器人搬运过程中的平稳性是人工不可比拟的。
4.为了实现上述目的,本实用新型是通过如下的技术方案来实现:一种灯板的自动下料机构,包括接近开关、夹爪气缸、夹爪、扫码枪、直线电机、四轴机器人和二维码,直线电机上设置有四轴机器人,四轴机器人上设置有夹爪,夹爪与夹爪气缸相连,接近开关设置在夹爪气缸一侧,扫码枪设置在夹爪上方一侧,扫码枪扫描载具上的二维码。
5.作为优选,所述的夹爪气缸为平行气缸。
6.作为优选,所述的接近开关与夹爪气缸通过数据信号连接。
7.本实用新型的有益效果:
8.本实用新型的传感器识别夹爪距载具的位置,保证准确抓取,相应的保证每一次的准确放置。直线电机模组的高速(1m/s)与与机器人的高精度(
±
0.02mm)使载具的搬运更高效,载具的存放更精准。
附图说明
9.下面结合附图和具体实施方式来详细说明本实用新型;
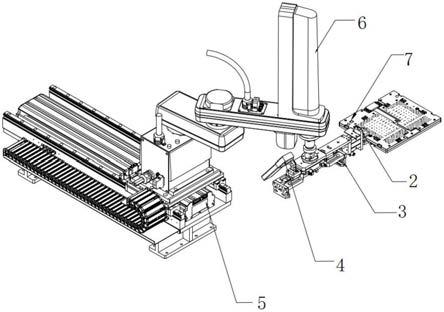
10.图1为本实用新型的立体结构示意图;
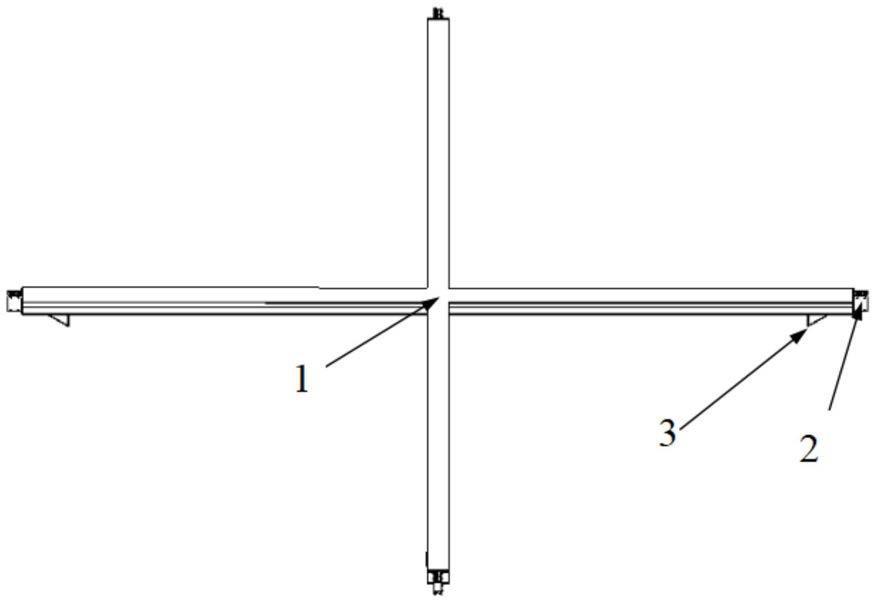
11.图2为本实用新型的主视图;
12.图3为本实用新型的俯视图。
具体实施方式
13.为使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面
结合具体实施方式,进一步阐述本实用新型。
14.参照图1-3,本具体实施方式采用以下技术方案:一种灯板的自动下料机构,包括接近开关1、夹爪气缸2、夹爪3、扫码枪4、直线电机5、四轴机器人6和二维码7,直线电机5上设置有四轴机器人6,四轴机器人6上设置有夹爪3,夹爪3与夹爪气缸2相连,接近开关1设置在夹爪气缸2一侧,扫码枪4设置在夹爪3上方一侧,扫码枪4扫描载具上的二维码7。
15.值得的注意的是,所述的夹爪气缸2为平行气缸。
16.此外,所述的接近开关1与夹爪气缸2通过数据信号连接。
17.本具体实施方式的工作原理:下料机构在接收到上站测试完成信号时,直线电机模组驱动四轴机器人移动到测试机出料料口。接近开关1检测距待夹取载具端面距离是否为可抓取范围内,通过信号传递给夹爪气缸2,执行夹取工作;
18.四轴机器人6带动夹爪3平稳拖至待抓取位;四轴机器人6的z轴下降到达扫码位,扫码枪4对载具进行扫描二维码7,获取上站测试结果,将结果反馈给四轴机器人6;
19.根据接收到的测试结果,夹爪3夹取载具,并实现四轴机器人6与直线电机5相配合,精准到达指定位置,由四轴机器人根据测试结果对ok/ng产品进行区别方向放置,放置完成后回到等待工作位。
20.实施例1:苏州某有限公司7台该直线电机模组与四轴机器人组合的自动上下料设备;
21.产品进入设备后,通过传感器识别夹爪距载具的位置,进行精准抓取。并根据机器人的算法及信号处理,对上一工站测试的产品的ok/ng与否进行分别存放动作。
22.以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
技术特征:
1.一种灯板的自动下料机构,其特征在于,包括接近开关(1)、夹爪气缸(2)、夹爪(3)、扫码枪(4)、直线电机(5)、四轴机器人(6)和二维码(7),直线电机(5)上设置有四轴机器人(6),四轴机器人(6)上设置有夹爪(3),夹爪(3)与夹爪气缸(2)相连,接近开关(1)设置在夹爪气缸(2)一侧,扫码枪(4)设置在夹爪(3)上方一侧,扫码枪(4)扫描载具上的二维码(7)。2.根据权利要求1所述的一种灯板的自动下料机构,其特征在于,所述的夹爪气缸(2)为平行气缸。3.根据权利要求1所述的一种灯板的自动下料机构,其特征在于,所述的接近开关(1)与夹爪气缸(2)通过数据信号连接。
技术总结
本实用新型公开了一种灯板的自动下料机构,包括接近开关、夹爪气缸、夹爪、扫码枪、直线电机、四轴机器人和二维码,直线电机上设置有四轴机器人,四轴机器人上设置有夹爪,夹爪与夹爪气缸相连,接近开关设置在夹爪气缸一侧,扫码枪设置在夹爪上方一侧,扫码枪扫描载具上的二维码。本实用新型四轴机器人与直线电机模组的配合,使搬运的速度大幅度提升。四轴机器人的本身柔性化这一优点加上直线电机作为第五轴,增加了整体结构在空间狭小的范围里的操作便利性,以及更节约整体设备的地面使用率。四轴机器人夹爪与传感器信号结合,使机器人将不同的产品对应搬运并存放的指定的区域,准确率极高。以及机器人搬运过程中的平稳性是人工不可比拟的。不可比拟的。不可比拟的。
技术研发人员:屠国权
受保护的技术使用者:上海德岂智能科技有限公司
技术研发日:2021.09.08
技术公布日:2022/4/26
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。