1.本发明属于康复医疗设备技术领域,具体涉及一种柔性上肢康复训练装置。
背景技术:
2.随着人口老龄化程度的不断加剧,脑卒中的发病率也在逐年上升,即使得到及时的救治,大多数患者依然会在脑卒中在发病后留下许多不同程度的后遗症,这些后遗症会极大降低患者的生活自理能力,严重影响患者及其家人的生活质量。通过对偏瘫患者进行及时的重复康复运动训练可以修复患者在脑卒中发病过程中受损的神经系统,并对肌肉骨骼等运动系统进行强化,有助于患者上肢的复健。
3.传统的上肢康复训练,均是康复治疗师通过使用不同的手法分别对患者的肩关节、肘关节、腕关节、指掌关节进行训练。这种训练过程单调、重复性高,康复治疗师体力消耗大,效率低,难以保证康复训练的稳定性和持续性。
4.上肢康复机器人能够克服传统理疗师人手不足或效率低等因素的影响,得到社会广泛关注。国内有关康复机器人的研发尚处于起步阶段,并且大多基于已经成熟的工业机器人技术,相较于国外仍有较大的差距。目前国内研发的康复机器人大多存在成本高、适应性差、训练模式不足等问题。由于机械行业较强的鲁棒性,现在康复机器人的主要结构仍为串联形式,新的结构试错成本非常高,同时难以推广。因此,在当前康复护理需求无法得以满足,劳动力不足的情况下,研发一种具有良好经济性、结构简单以及能够对患者上肢的各个关节进行针对性训练的装置是迫在眉睫的,也是具有广阔市场前景和良好的社会意义的。
技术实现要素:
5.本发明的目的是克服现有技术中存在的不能对肩关节、肘关节和腕关节等进行针对性训练、设备结构复杂、不便于调节驱动力以及康复关节不全面的缺陷,提供一种能对肩关节、肘关节和腕关节等进行针对性训练以及便于调节驱动力的柔性上肢康复训练装置。
6.本发明解决其技术问题所采用的技术方案是:
7.一种柔性上肢康复训练装置,其特征在于:包括座椅、通过训练臂支架对称安装在所述座椅两侧的高度调节组件以及通过调节杆固定在所述高度调节组件上的训练臂;所述训练臂包括:肩关节组件、通过大臂组件与所述肩关节组件连接的肘关节组件、通过小臂组件与所述肘关节组件连接的前臂旋转组件以及与所述前臂旋转组件连接的腕关节组件;
8.高度调节组件,用于调整整个训练臂的高度;
9.肩关节组件,用于带动肩关节做内收/外展运动、内旋/外旋运动以及屈曲/伸展运动;
10.肘关节组件,用于带动肘关节做屈曲/伸展运动;
11.前臂旋转组件,用于带动前臂做旋前/旋后运动;
12.腕关节组件,用于带动腕关节做屈曲/伸展运动。
13.进一步地,所述肩关节组件包括与所述调节杆固定连接的肩部固定板、安装在所述肩部固定板上的第一电机、一端与所述第一电机的输出轴同轴固定连接的第一曲架、安装在所述第一曲架另一端上的第二电机、一端与所述第二电机的输出轴同轴固定连接的第二曲架以及安装在所述第二曲架另一端上的第三电机。
14.进一步地,所述大臂组件包括:连接在所述第三电机的输出轴上的上大臂板、通过第一滑动组件与所述上大臂板滑动连接的下大臂板、固定在所述上大臂板内侧面上的第一滑轨以及通过第一滑块与所述第一滑轨滑动连接的弧形大臂支撑板;所述第一滑动组件包括:固定端固定在所述上大臂板上的第一推杆,所述第一推杆的伸缩端与所述下大臂板固定连接,所述上大臂板的内侧面上竖直固定有两个第三滑轨,所述下大臂板通过第三滑块沿所述第三滑轨滑动。
15.进一步地,所述小臂组件包括:上小臂板、通过第二滑动组件与所述上小臂板滑动连接的下小臂板、固定在所述上小臂板上的第二滑轨以及通过第二滑块与所述第二滑轨滑动连接的弧形小臂支撑板;所述第二滑动组件包括:固定端固定在所述上小臂板上的第二推杆,所述第二推杆的伸缩端与所述下小臂板固定连接,所述上小臂板的内侧面上竖直固定有两个第四滑轨,所述下小臂板通过第四滑块沿所述第四滑轨滑动。
16.进一步地,所述前臂旋转组件包括:与所述下小臂板固定连接的旋转底架、对称转动连接在所述旋转底架两端的第一摆臂和第二摆臂、安装在所述第一摆臂上端和第二摆臂上端的电机支架、安装在所述电机支架上的旋转电机、与所述旋转电机的输出轴同轴连接的第一主动带轮、通过皮带与所述第一主动带轮带传动连接的第一从动带轮、所述第一从动带轮的第一转轴从所述电机支架的一端穿过且与所述第一摆臂固定连接,所述电机支架通过轴承与所述第一转轴转动连接,所述第一摆臂上固定安装有第二转轴,第二转轴上通过轴承转动安装有第一把手支架,第一把手支架上安装有与第二转轴同轴固定的第二主动带轮,第二主动带轮通过皮带带传动连接有第二从动带轮;所述第二从动带轮的第二转轴的一端固定安装在所述第一把手支架上,另一端穿过第二把手支架同轴固定有腕关节连接件;第二把手支架通过轴承与所述第二转轴转动连接,所述第二把手支架通过支架固定轴安装在所述第二摆臂上,所述第二把手支架与所述支架固定轴转动连接。
17.进一步地,所述腕关节组件包括:固定安装在所述腕关节连接件上的腕关节固定架、一端转动安装在所述腕关节固定架上的旋转架腿、与旋转架腿的另一端固定连接的腕关节架体、安装在腕关节架体上的第五电机、与所述第五电机的输出轴同轴连接的第三主动带轮、通过腕关节皮带与所述第三主动带轮带传动连接的第三从动带轮以及设置在所述腕关节架体上的握杆,所述第三从动带轮通过腕关节转轴与所述腕关节固定架固定连接,所述腕关节转轴上还固定连接有用来张紧腕关节皮带的张紧架,所述腕关节转轴与所述旋转架腿转动连接。
18.进一步地,所述肘关节组件包括:安装在所述下大臂板上的第四电机,所述第四电机的输出轴与所述上小臂板连接。
19.进一步地,所述高度调节组件包括:调长控制杆、滑动安装在所述调长控制杆上两相对设置的第一安装块和第二安装块、固定在所述训练臂支架上的第三安装块以及与所述调节杆固定连接的第四安装块;所述第一安装块与所述第三安装块之间转动连接有第一调长杆,所述第二安装块与所述第三安装块之间转动连接有第二调长杆,所述第一安装块与
所述第四安装块之间转动连接有第三调长杆,所述第二安装块与所述第四安装块之间转动连接有第四调长杆;所述调长控制杆为螺纹杆,所述第一安装块和所述第二安装块的外侧设置有调节螺母。
20.进一步地,所述训练臂支架上开设有竖向延伸的滑槽,所述调节杆从所述滑槽内穿出沿所述滑槽滑动。
21.更进一步地,所述座椅的侧面并排设置有多个调节孔,所述训练臂支架的下部设置有供所述座椅滑动的第五滑轨和与所述调节孔对接的固定孔,调节孔为螺纹孔,一固定螺栓从所述固定孔中穿出与不同的调节孔螺旋连接调节座椅的宽度。
22.本发明的一种柔性上肢康复训练装置的有益效果是:
23.1、本发明通过通过肩关节组件、肘关节组件、前臂旋转组件以及腕关节组件能够实现带动患者进行六自由的关节康复训练,能够对患者的肩关节、肘关节和腕关节进行针对性训练,通过第一滑动组件和第二滑动组件对大臂组件和小臂组件进行调节,能够适应不同臂长的患者。
24.2、本发明通过设置有高度调节组件,可根据患者的身高,调整整个训练臂相对座椅的高度,也能够根据患者的肩宽,通过设置在训练臂支架上的第五滑轨,调节左右两个训练臂支架在座椅上的位置,从而适应不同肩宽的患者。
25.3、两个训练臂与座椅设置成可拆卸机构,以适用不同环境下的康复训练,当受伤患者是单臂受损时,只需要安装一个训练臂,进行康复训练,安装方便,体积较小,有效的减少患者在使用过程中的排斥心理。
附图说明
26.下面结合附图和具体实施方式对本发明作进一步详细的说明。
27.图1是本发明实施例的整体结构图;
28.图2是本发明实施例的肩关节组件结构图;
29.图3是本发明实施例的大臂组件和小臂组件结构图;
30.图4是本发明实施例的大臂组件和小臂组件另一视角结构图;
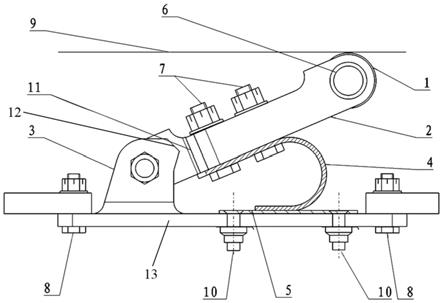
31.图5是本发明实施例的前臂旋转组件结构图;
32.图6是本发明实施例的前臂旋转组件另一视角结构图;
33.图7是本发明实施例的腕关节组件结构图;
34.图8是本发明实施例的高度调节组件与训练臂支架连接图;
35.图9是本发明实施例的高度调节组件结构图;
36.图10是本发明实施例的座椅结构图。
37.图中:1、座椅,2、训练臂支架,3、高度调节组件,30、调长控制杆,31、第一安装块,32、第二安装块,33、第三安装块,34、第四安装块,35、第一调长杆,36、第二调长杆,37、第三调长杆,38、第四调长杆,39、调节螺母,4、肩关节组件,40、肩部固定板,41、第一电机,42、第一曲架,43、第二电机,44、第二曲架,45、第三电机,5、大臂组件,50、上大臂板,51、第一推杆,52、第三滑轨,53、第三滑块,54、下大臂板,55、第一滑轨,56、第一滑块,57、弧形大臂支撑板,6、肘关节组件,61、第四电机,7、小臂组件,70、上小臂板,71、第二推杆,72、第四滑轨,73、第四滑块,74、下小臂板,75、第二滑轨,76、第二滑块,77、弧形小臂支撑板,8、前臂旋转
组件,80、旋转底架,81、第一摆臂,82、第二摆臂,83、电机支架,84、旋转电机,85、第一主动带轮,86、第一从动带轮,87、第一转轴,88、第二转轴,89、第一把手支架,810、第二主动带轮,811、第二从动带轮,812、第二把手支架,813、腕关节连接件,814、支架固定轴,9、腕关节组件,90、腕关节固定架,91、旋转架腿,92、腕关节架体,93、第五电机,94、第三主动带轮,95、腕关节皮带,96、第三从动带轮,97、握杆,98、腕关节转轴,99、张紧架,10、调节孔,11、第五滑轨,12、固定孔,13、固定螺栓,14、调节杆,15、滑槽。
具体实施方式
38.现在结合附图对本发明作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本发明有关的构成。
39.如图1-图10所示的本发明的一种柔性上肢康复训练装置的具体实施例,包括座椅1、通过训练臂支架2对称安装在座椅1两侧的高度调节组件3以及通过调节杆14固定在所述高度调节组件3上的训练臂;训练臂包括:肩关节组件4、通过大臂组件5与肩关节组件4连接的肘关节组件6、通过小臂组件7与肘关节组件6连接的前臂旋转组件8以及与前臂旋转组件8连接的腕关节组件9;
40.高度调节组件3,用于调整整个训练臂的高度;
41.肩关节组件4,用于带动肩关节做内收/外展运动、内旋/外旋运动以及屈曲/伸展运动;
42.肘关节组件6,用于带动肘关节做屈曲/伸展运动;
43.前臂旋转组件8,用于带动前臂做旋前/旋后运动;
44.腕关节组件9,用于带动腕关节做屈曲/伸展运动。
45.参见图2,肩关节组件4包括与调节杆14固定连接的肩部固定板40、安装在肩部固定板40上的第一电机41、一端与第一电机41的输出轴同轴固定连接的第一曲架42、安装在第一曲架42另一端上的第二电机43、一端与第二电机43的输出轴同轴固定连接的第二曲架44以及安装在第二曲架44另一端上的第三电机45;第一电机41工作带动肩关节做内收/外展运动,第二电机43工作带动肩关节做内旋/外旋运动,第三电机45工作带动肩关节做屈曲/伸展运动。肩关节组件4工作时,第一电机41嵌套安装在肩部固连板上,其输出轴与第一曲架42连接,第一电机41的转动轴为垂直轴,因而第一电机41工作可带动肩关节做内收/外展运动;第二电机43嵌套安装在第一曲架42的另一端,其输出轴与第二曲架44连接,第一曲架42的两平面之间为90
°
,因而第二电机43的转动轴为矢状轴,可带动肩关节做内旋/外旋运动;第三电机45嵌套安装在第二曲架44的另一端,其输出轴与上大臂板50连接,第二曲架44两平面之间为90
°
,因而第三电机45的转动轴为额状轴,可带动肩关节做屈曲/伸展运动。
46.如图3-图4所示,大臂组件5包括:连接在第三电机45的输出轴上的上大臂板50、通过第一滑动组件与上大臂板50滑动连接的下大臂板54、固定在上大臂板50内侧面上的第一滑轨55以及通过第一滑块56与第一滑轨55滑动连接的弧形大臂支撑板57;第一滑动组件包括:固定端固定在上大臂板50上的第一推杆51,第一推杆51的伸缩端与下大臂板54固定连接,上大臂板50的内侧面上竖直固定有两个第三滑轨52,第一推杆51伸缩,带动下大臂板54通过第三滑块53沿第三滑轨52滑动,用于调节下大臂板54的伸出长度,能够根据不同患者的大臂长来调节下大臂板54的伸出长度。
47.参见图3和图4,小臂组件7包括:上小臂板70、通过第二滑动组件与上小臂板70滑动连接的下小臂板74、固定在上小臂板70上的第二滑轨75以及通过第二滑块76与第二滑轨75滑动连接的弧形小臂支撑板77;第二滑动组件包括:固定端固定在上小臂板70上的第二推杆71,第二推杆71的伸缩端与下小臂板74固定连接,上小臂板70的内侧面上竖直固定有两个第四滑轨72,第二推杆71伸缩,带动下小臂板74通过第四滑块73沿第四滑轨72滑动,用于调节下前臂板的伸出长度,能够根据不同患者的小臂长来调节下小臂板74的伸出长度。
48.如图5-图6所示,前臂旋转组件8包括:与下小臂板74固定连接的旋转底架80、对称转动连接在旋转底架80两端的第一摆臂81和第二摆臂82、安装在第一摆臂81上端和第二摆臂82上端的电机支架83、安装在电机支架83上的旋转电机84、与旋转电机84的输出轴同轴连接的第一主动带轮85、通过皮带与第一主动带轮85带传动连接的第一从动带轮86、第一从动带轮86的第一转轴87从电机支架83的一端穿过且与第一摆臂81固定连接,电机支架83通过轴承与第一转轴87转动连接,第一摆臂81上固定安装有第二转轴88,第二转轴88上通过轴承转动安装有第一把手支架89,第一把手支架89上安装有与第二转轴88同轴固定的第二主动带轮810,第二主动带轮810通过皮带带传动连接有第二从动带轮811;第二从动带轮811的第二转轴88的一端固定安装在第一把手支架89上,另一端穿过第二把手支架812同轴固定有腕关节连接件813;第二把手支架812通过轴承与第二转轴88转动连接,第二把手支架812通过支架固定轴814安装在第二摆臂82上,第二把手支架812与支架固定轴814转动连接。本实施例中,第一主动带轮85的直径小于第一从动带轮86的直径,第一主动带轮85的转速大于第一从动带轮86的转速,使第一主动带轮85与第一从动带轮86形成适当的传动比,使前臂旋前旋后运动的速度适当,不会太快或太慢。电机支架83为v字形,第一摆臂81的上端和第二摆臂82的上端分别转动连接在电机支架83的两端,旋转电机84安装在电机支架83的中间位置,使其与第一摆臂81、第二摆臂82、第一把手支架89及第二把手支架812利用平行四边形运动的原理,实现对前臂的康复训练。假设旋转电机84做逆时针转动时带动第一主动带轮85逆时针转动,第一主动带轮85作为主动轮通过第一皮带将力传递给第一从动带轮86实现逆时针转动,通过第一从动带轮86的第一转轴87带动与其同轴连接的第一摆臂81,通过第一摆臂81上的第二转动轴将力传递给第二主动带轮810,再通过皮带将运动传递给第二从动带轮811,第二从动带轮811带动同轴连接的腕关节连接件813运动,从而实现右臂旋前动作,反之,实现右臂的旋后动作。通过前臂旋前旋后的训练动作可以有效锻炼到旋前圆肌和旋前方肌以及旋后肌和肱二头肌。本发明中的柔性前臂康复训练装置结构简单,实现主、被动相结合训练
49.参见图7,腕关节组件9包括:固定安装在腕关节连接件813上的腕关节固定架90、一端转动安装在腕关节固定架90上的旋转架腿91、与旋转架腿91的另一端固定连接的腕关节架体92、安装在腕关节架体92上的第五电机93、与第五电机93的输出轴同轴连接的第三主动带轮94、通过腕关节皮带95与第三主动带轮94带传动连接的第三从动带轮96以及设置在腕关节架体92上的握杆97,第三从动带轮96通过腕关节转轴98与腕关节固定架90固定连接,腕关节转轴98上还固定连接有用来张紧腕关节皮带95的张紧架99,腕关节转轴98与旋转架腿91转动连接。当患者右手抓握在握杆97处,假设第五电机93顺时针转动,第三主动带轮94作为主动轮通过皮带将力传递给第三从动带轮96实现顺时针转动,第三从动带轮96的腕关节转轴98带动同轴连接的旋转架腿91转动,从而带动腕关节架体92转动,从而实现患
者腕关节的屈曲运动,反之当第五电机93逆时针转动时,实现腕关节的伸展运动。
50.肘关节组件6包括:安装在下大臂板54上的第四电机61,第四电机61的输出轴与上小臂板70连接。第四电机61转动带动肘关节做屈曲/伸展运动。
51.如图8和图9所示,高度调节组件3包括:调长控制杆30、滑动安装在调长控制杆30上两相对设置的第一安装块31和第二安装块32、固定在训练臂支架2上的第三安装块33以及与调节杆14固定连接的第四安装块34;第一安装块31与第三安装块33之间转动连接有第一调长杆35,第二安装块32与第三安装块33之间转动连接有第二调长杆36,第一安装块31与第四安装块34之间转动连接有第三调长杆37,第二安装块32与第四安装块34之间转动连接有第四调长杆38;调长控制杆30为螺纹杆,第一安装块31和第二安装块32的外侧设置有调节螺母39。为了方便拧动,调节螺母39采用蝶形螺母的形式,拧动调节螺母39使其紧贴在第一安装块31和第二安装块32的外端,进而调节第一安装块31和第二安装块32的距离以调节肩部固定板40的高度。在机器人的使用过程中,当患者坐在座椅1上,调节调节螺母39,使第一安装块31和第二安装块32的距离减小或增大,此时带动固定在第四安装块34上的肩部固定板40上下移动,从而起到调节训练臂高度的作用;训练臂支架2上设置有竖向延伸的滑槽15,调节杆14从滑槽15内穿出,并沿滑槽15上下运动,以调节训练臂的高度。
52.参见图10,座椅1的侧面并排设置有多个调节孔10,训练臂支架2的下部设置有供座椅1滑动的第五滑轨11和与调节孔10对接的固定孔12,调节孔10为螺纹孔,一固定螺栓13从固定孔12中穿出与不同的调节孔10螺旋连接调节座椅1的宽度。两个训练臂与座椅1设置成可拆卸机构,以适用不同环境下的康复训练,当受伤患者是单臂受损时,只需要安装一个训练臂,进行康复训练,安装方便,体积较小,有效的减少患者在使用过程中的排斥心理。
53.当患者进行康复训练时,患者坐在座椅1上,其座椅1可以放到其他现有的训练平台或坐凳或其他可以放置机器人的平台上,护士或者陪护人员先根据患者的肩宽,通过设置在训练臂支架2上的第五滑轨11,调节左右两个训练臂支架2在座椅1上的位置,拧紧固定螺栓13将训练臂支架2固定在座椅1上,从而适应不同肩宽的患者。将患者的大臂放在弧形大臂支撑板57上,小臂放在弧形小臂支撑板77上,并用绑带或者魔术贴进行绑缚,防止在训练过程中大臂和小臂跟不上装置的训练节奏而带来的二次伤害。根据患者的大臂和小臂的长度,通过第一滑动组件和第二滑动组件分别调节下大臂板54和下小臂板74,使患者的手握住握杆97,打开电源开关,装置带动患者进行康复训练。
54.应当理解,以上所描述的具体实施例仅用于解释本发明,并不用于限定本发明。由本发明的精神所引伸出的显而易见的变化或变动仍处于本发明的保护范围之中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。