1.本技术涉及数据处理技术领域,尤其涉及一种垃圾回收调度方法。
背景技术:
2.2019年7月1日,垃圾分类正式在上海开始施行,垃圾分类可以有效提高垃圾的资源价值和经济价值,目前已大范围推行。
3.垃圾从生产到回收处理可以概括为三个阶段,第一阶段:居民自主对垃圾进行分类投放;第二阶段:保洁员收集各居民门前的垃圾并运输至区域垃圾堆放处;第三阶段:垃圾运输车收集各个区域垃圾堆放处的垃圾至垃圾回收站。
4.但是,在该方案中,保洁员和垃圾运输车司机等清运人员对各个垃圾堆放点的垃圾无差别进行清理运输,其中存在无需收取垃圾的垃圾堆放点,使得保洁员和垃圾运输车进行了多余调度,不仅降低了清运人员的工作效率,还造成了人力资源和运输资源的浪费。
技术实现要素:
5.针对现有技术存在的上述问题,本技术实施例提供了一种垃圾回收调度方法。
6.第一方面,本技术提供一种垃圾回收调度方法,应用于服务器设备,包括:
7.接收居民端发送的第一图像,基于所述第一图像确定第一垃圾堆放量;所述第一图像为第一垃圾堆放位置的垃圾图像,所述第一垃圾堆放位置为居民垃圾堆放处所在的位置;接收清运人员端发送的第二图像,基于所述第二图像确定第二垃圾堆放量;所述第二图像为第二垃圾堆放位置的垃圾图像,所述第二垃圾堆放位置为区域垃圾堆放处所在的位置;基于所述第一垃圾堆放量、第一垃圾堆放时长和第一垃圾堆放位置确定第一清运人员的第一最优路线,并将所述第一最优路线发送至所述清运人员端;所述第一最优路线用于指导所述第一清运人员将居民垃圾堆放处的垃圾运输至区域垃圾堆放处;基于所述第二垃圾堆放量、第二垃圾堆放时长和第二垃圾堆放位置确定第二清运人员的第二最优路线,并将所述第二最优路线发送至所述清运人员端;所述第二最优路线用于指导所述第二清运人员将区域垃圾堆放处的垃圾运输至垃圾回收站。
8.第二方面,本技术提供一种垃圾回收调度方法,应用于清运人员设备,包括:
9.接收服务器端发送的第一清运人员的第一最优路线,所述第一最优路线用于指导所述第一清运人员将居民垃圾堆放处的垃圾运输至区域垃圾堆放处;接收所述第一清运人员上传的第二图像并发送至所述服务器端;所述第二图像为区域垃圾堆放处的垃圾图像;接收所述服务器端发送的第二清运人员的第二最优路线,所述第二最优路线用于指导所述第二清运人员将区域垃圾堆放处的垃圾运输至垃圾回收站。
10.第三方面,本技术提供一种垃圾回收调度方法,应用于居民设备,包括:
11.接收居民上传的第一图像并发送至服务器端,所述第一图像为居民垃圾堆放处的垃圾图像,用于确定所述居民垃圾堆放处对应的垃圾堆放量。
12.第四方面,本技术提供一种垃圾回收调度装置,应用于服务器设备,包括:
13.第一接收模块,用于接收居民端发送的第一图像,基于所述第一图像确定第一垃圾堆放量;所述第一图像为第一垃圾堆放位置的垃圾图像,所述第一垃圾堆放位置为居民垃圾堆放处所在的位置;第二接收模块,用于接收清运人员端发送的第二图像,基于所述第二图像确定第二垃圾堆放量;所述第二图像为第二垃圾堆放位置的垃圾图像,所述第二垃圾堆放位置为区域垃圾堆放处所在的位置;第一发送模块,用于基于所述第一垃圾堆放量、第一垃圾堆放时长和第一垃圾堆放位置确定第一清运人员的第一最优路线,并将所述第一最优路线发送至所述清运人员端;所述第一最优路线用于指导所述第一清运人员将居民垃圾堆放处的垃圾运输至区域垃圾堆放处;第二发送模块,用于基于所述第二垃圾堆放量、第二垃圾堆放时长和第二垃圾堆放位置确定第二清运人员的第二最优路线,并将所述第二最优路线发送至所述清运人员端;所述第二最优路线用于指导所述第二清运人员将区域垃圾堆放处的垃圾运输至垃圾回收站。
14.第五方面,本技术提供一种垃圾回收调度装置,应用于清运人员设备,包括:
15.第三接收模块,用于接收服务器端发送的第一清运人员的第一最优路线,所述第一最优路线用于指导所述第一清运人员将居民垃圾堆放处的垃圾运输至区域垃圾堆放处;第四接收模块,用于接收所述第一清运人员上传的第二图像并发送至所述服务器端;所述第二图像为区域垃圾堆放处的垃圾图像;第五接收模块,用于接收所述服务器端发送的第二清运人员的第二最优路线,所述第二最优路线用于指导所述第二清运人员将区域垃圾堆放处的垃圾运输至垃圾回收站。
16.第六方面,本技术提供一种垃圾回收调度装置,应用于居民设备,包括:
17.第六接收模块,用于接收居民上传的第一图像并发送至服务器端,所述第一图像为居民垃圾堆放处的垃圾图像,用于确定所述居民垃圾堆放处对应的垃圾堆放量。
18.第七方面,本技术还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述第一方面、第二方面或第三方面的垃圾回收调度方法的步骤。
19.第八方面,本技术还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述第一方面、第二方面或第三方面的垃圾回收调度方法的步骤。
20.第九方面,本技术还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述第一方面、第二方面或第三方面的垃圾回收调度方法的步骤。
21.本技术提供的垃圾回收调度方法,服务器端根据居民上传的居民垃圾堆放处的垃圾图像,对居民垃圾堆放处的垃圾量进行识别,从而通过各个居民垃圾堆放处的垃圾堆放量、垃圾堆放时长和垃圾堆放位置为第一清运人员规划清运垃圾的最优路线,使得居民参与到垃圾回收调度的环节中来;根据第一清运人员上传的区域垃圾堆放处的垃圾图像,对区域垃圾堆放处的垃圾量进行识别,从而通过各个区域垃圾堆放处的垃圾堆放量、垃圾堆放时长和垃圾堆放位置为第二清运人员规划清运垃圾的最优路线,更加智能地实现了对第一清运人员和第二清运人员的按需调度,提高了清运人员的工作效率,减少了人力资源和运输资源的浪费。
附图说明
22.为了更清楚地说明本技术或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
23.图1是本技术实施例提供的垃圾回收调度方法的流程示意图之一;
24.图2是本技术实施例提供的垃圾回收调度方法的流程示意图之二;
25.图3是本技术实施例提供的垃圾回收调度方法的流程示意图之三;
26.图4是本技术实施例提供的垃圾回收调度系统的结构示意图;
27.图5是本技术实施例提供的智能回收宝的界面示意图;
28.图6是本技术实施例提供的垃圾回收调度装置的结构示意图之一;
29.图7是本技术实施例提供的垃圾回收调度装置的结构示意图之二;
30.图8是本技术实施例提供的垃圾回收调度装置的结构示意图之三;
31.图9是本技术实施例提供的清运人员设备的硬件结构示意图。
具体实施方式
32.垃圾回收的过程可以概括为三个阶段,第一阶段:居民自主对垃圾进行分类投放;第二阶段:保洁员收集各居民门前的垃圾并运输至区域垃圾堆放处;第三阶段:垃圾运输车收集各个区域垃圾堆放处的垃圾至垃圾回收站。
33.在第一阶段中,居民有时候会面临无法确定垃圾所属的分类的情况下,导致垃圾分类错误,影响后续垃圾分类回收的处理。
34.在第二阶段和第三阶段中,保洁员无法预先知悉各个居民垃圾堆放处的垃圾量,逐个无差别地对各个居民垃圾堆放处的垃圾进行收取;垃圾运输车司机也无法预先知悉各个区域垃圾堆放处的垃圾量,逐个无差别地对各个区域垃圾堆放处的垃圾进行收取,使得保洁员和垃圾运输车进行了多余调度,不仅降低了清运人员的工作效率,还造成了人力资源和燃料资源的浪费。
35.针对现有技术存在的上述问题,本技术实施例提供了一种垃圾分类回收调度方法、装置及存储介质,服务器端根据居民上传的居民垃圾堆放处的垃圾图像,对居民垃圾堆放处的垃圾量进行识别,从而通过各个居民垃圾堆放处的垃圾堆放量、垃圾堆放时长和垃圾堆放位置为第一清运人员规划清运垃圾的最优路线,使得居民参与到垃圾回收调度的环节中来;根据第一清运人员上传的区域垃圾堆放处的垃圾图像,对区域垃圾堆放处的垃圾量进行识别,从而通过各个区域垃圾堆放处的垃圾堆放量、垃圾堆放时长和垃圾堆放位置为第二清运人员规划清运垃圾的最优路线,更加智能地实现了对第一清运人员和第二清运人员的按需调度,提高了清运人员的工作效率,减少了人力资源和运输资源的浪费。
36.本技术的说明书和权利要求书中的术语“第一”、“第二”等是用于区别类似的对象,而不用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便本技术的实施例能够以除了在这里图示或描述的那些以外的顺序实施,且“第一”、“第二”等所区分的对象通常为一类,并不限定对象的个数,例如第一对象可以是一个,也可以是多个。此外,说明书以及权利要求中“和/或”表示所连接对象的至少其中之一,字符“/”,一般表示前后关联对象是一种“或”的关系。
37.为使本技术的目的、技术方案和优点更加清楚,下面将结合本技术中的附图,对本技术中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
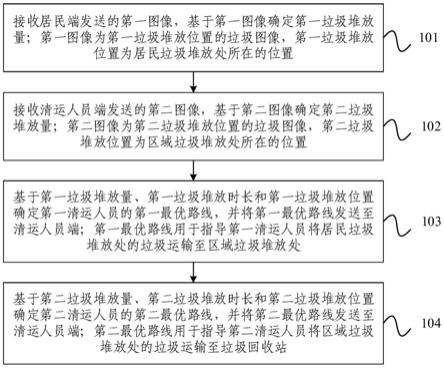
38.图1是本技术实施例提供的垃圾回收调度方法的流程示意图之一,如图1所示,该方法的执行主体为服务器设备,该方法至少包括如下步骤。
39.步骤101、接收居民端发送的第一图像,基于第一图像确定第一垃圾堆放量;第一图像为第一垃圾堆放位置的垃圾图像,第一垃圾堆放位置为居民垃圾堆放处所在的位置。
40.具体地,服务器端接收居民端发送的第一图像,第一图像即为居民垃圾堆放处的垃圾图像,由居民通过拍照等方式上传至居民端设备。居民垃圾堆放处可以是居民门口的垃圾桶等。
41.可选地,居民端可以为居民的终端设备中的应用程序(application,app),居民通过在居民垃圾回收app中进行注册的方式使得居民标识(identity,id)与各个居民垃圾堆放处位置进行绑定。各个垃圾堆放处所在的位置已被事先上传至服务器。
42.服务器端接收到居民端发送的第一图像时,同时确定与第一图像对应的居民垃圾堆放处id和图像上传时间,用于获得居民id对应第一垃圾堆放位置和判断第一垃圾堆放时长。
43.服务器端基于居民端发送的第一图像,通过图像处理技术确定第一垃圾堆放处的第一垃圾堆放量。例如,通过第一图像中垃圾桶内垃圾表面距垃圾桶盖的距离确定桶内垃圾的容量。例如,通过构建深度学习神经网络模型,对图像内垃圾堆放量进行检测。
44.步骤102、接收清运人员端发送的第二图像,基于第二图像确定第二垃圾堆放量;第二图像为第二垃圾堆放位置的垃圾图像,第二垃圾堆放位置为区域垃圾堆放处所在的位置。
45.具体地,服务器端接收清运人员端发送的第二图像,第二图像为区域垃圾堆放处的垃圾图像。本技术中将清运人员区分为第一清运人员和第二清运人员,第一清运人员对居民垃圾堆放处的垃圾进行清理并运输至区域垃圾堆放处,例如社区保洁员;第二清运人员将区域垃圾堆放处的垃圾运输至垃圾回收站,例如垃圾运输车司机。服务器端向每一个第一清运人员id分配有其工作范围内的多个居民垃圾堆放处,向每一个第二清运人员id分配有其工作范围内的多个区域垃圾堆放处。
46.因此,清运人员端可以区分为第一清运人员端和第二清运人员端。可选地,清运人员端可以是清运人员专用的便携式电子设备,仅支持与垃圾回收关联的任务接收和处理,本技术中称之为“智能回收宝”。第一清运人员和第二清运人员通过在智能回收宝中进行注册的方式,获取各自的工作安排。
47.第一清运人员将居民垃圾堆放处的垃圾运输至区域垃圾堆放处后,通过智能回收宝上传第二图像。服务器端接收到第二图像的同时,匹配到第二图像上传的时间,以及基于第一清运人员上传第二图像时的定位确定对应的区域垃圾堆放处所在的位置,从而获得与第一清运人员id对应的第二垃圾堆放位置和判断第二垃圾堆放时长。
48.步骤103、基于第一垃圾堆放量、第一垃圾堆放时长和第一垃圾堆放位置确定第一
清运人员的第一最优路线,并将第一最优路线发送至清运人员端;第一最优路线用于指导第一清运人员将居民垃圾堆放处的垃圾运输至区域垃圾堆放处。
49.具体地,服务器端根据多个居民端发送的第一图像以及居民信息,获取到第一清运人员工作范围内的多个居民垃圾堆放处的第一垃圾堆放量、第一垃圾堆放时长和第一垃圾堆放位置。其中,第一垃圾堆放时长为上一次对第一垃圾堆放位置的垃圾进行清理的时间点到第一图像上传的时间点之间的时间间隔。
50.服务器端根据第一清运人员工作范围内的多个居民垃圾堆放处的第一垃圾堆放量、第一垃圾堆放时长和第一垃圾堆放位置,为第一清运人员规划第一最优路线,本技术中的最优路线是指耗时最短的路线。当垃圾堆放量超出一定阈值,例如垃圾桶中的垃圾容量超出75%说明该垃圾堆放处的垃圾需要清理;当垃圾堆放时长超出一定预设时长,例如冬季垃圾堆放时长超过3天,夏季垃圾堆放时长超过2天,即使垃圾容量未超出垃圾桶容量的75%也需要对垃圾进行清理。垃圾堆放量和垃圾堆放时长的阈值可以由管理员根据实际情况进行设置。
51.服务器端确定第一清运人员的第一最优路线后,在智能回收宝上通过地图的方式进行展示,指导第一清运人员根据第一最优路线完成对各居民垃圾堆放处的垃圾的清理运输。
52.步骤104、基于第二垃圾堆放量、第二垃圾堆放时长和第二垃圾堆放位置确定第二清运人员的第二最优路线,并将第二最优路线发送至清运人员端;第二最优路线用于指导第二清运人员将区域垃圾堆放处的垃圾运输至垃圾回收站。
53.具体地,服务器端根据多个第一清运人员端发送的第二图像,获取到第二清运人员工作范围内的多个区域垃圾堆放处的第二垃圾堆放量、第二垃圾堆放时长和第二垃圾堆放位置。其中,第二垃圾堆放时长为上一次对第二垃圾堆放位置的垃圾进行清理的时间点到第二图像上传的时间点之间的时间间隔。
54.服务器端根据第二清运人员工作范围内的多个区域垃圾堆放处的第二垃圾堆放量、第二垃圾堆放时长和第二垃圾堆放位置,为第二清运人员规划第二最优路线。当垃圾堆放量超出一定阈值,例如区域垃圾堆放处的垃圾量超出其可容纳垃圾总量的75%时说明该垃圾堆放处的垃圾需要清理;当垃圾堆放时长超出一定预设时长,例如冬季垃圾堆放时长超过3天,夏季垃圾堆放时长超过2天,即使垃圾量未超出其可容纳垃圾总量的75%也需要对垃圾进行清理。垃圾堆放量和垃圾堆放时长的阈值可以由管理员根据实际情况进行设置。
55.服务器端确定第二清运人员的第二最优线路后,在智能回收宝上通过地图的方式进行展示,指导第二清运人员根据第二最优路线完成对各区域垃圾堆放处的垃圾的清理运输。
56.本技术实施例提供的垃圾回收调度方法,服务器端根据居民上传的居民垃圾堆放处的垃圾图像,对居民垃圾堆放处的垃圾量进行识别,从而通过各个居民垃圾堆放处的垃圾堆放量、垃圾堆放时长和垃圾堆放位置为第一清运人员规划清运垃圾的最优路线,使得居民参与到垃圾回收调度的环节中来;根据第一清运人员上传的区域垃圾堆放处的垃圾图像,对区域垃圾堆放处的垃圾量进行识别,从而通过各个区域垃圾堆放处的垃圾堆放量、垃圾堆放时长和垃圾堆放位置为第二清运人员规划清运垃圾的最优路线,更加智能地实现了
对第一清运人员和第二清运人员的按需调度,提高了清运人员的工作效率,减少了人力资源和运输资源的浪费。
57.可选地,该方法还包括:接收清运人员端发送的居民垃圾分类的判断结果;基于判断结果对居民积分进行调整,并将调整结果发送至居民端。
58.具体地,在垃圾分类回收的场景中,可以通过积分的方式对居民垃圾分类的结果进行表征。居民垃圾分类结果是否正确由第一清运人员进行判断,第一清运人员经过垃圾分类专业知识培训,可以对垃圾分类结果准确识别和判断。第一清运人员抵达各居民垃圾堆放处后,登录智能回收宝,对居民垃圾分类结果进行判断,例如通过在智能回收宝的保洁员页面设置垃圾分类结果判断选项,保洁员通过在屏幕上的点选操作选择垃圾分类正确与否。
59.智能回收宝接收到第一清运人员的判断结果后发送给服务器端,服务器端对与第一清运人员当前所在居民垃圾堆放处位置匹配的居民id的居民积分进行调整,例如:分类正确则增加居民积分,分类错误则不增加居民积分。服务器端完成居民积分的调整后将调整结果发送给相对应的居民端。
60.本技术实施例提供的垃圾回收调度方法,通过第一清运人员对居民垃圾分类结果进行判断,基于判断结果调整居民积分,通过积分的方式提升居民的垃圾分类意识和垃圾分类积极性。
61.可选地,该方法还包括:接收居民端发送的第三图像;第三图像为居民上传的待投放垃圾的垃圾图像;将第三图像输入至垃圾种类识别模型中,获得垃圾种类识别模型输出的垃圾分类指导信息;其中,垃圾种类识别模型是基于样本垃圾图像及预先确定的垃圾种类标签训练后得到的,垃圾分类指导信息用于指导居民对待投放垃圾进行垃圾分类;将垃圾分类指导信息发送至居民端。
62.具体地,服务器端接收居民端发送的第三图像,第三图像为居民上传的待投放垃圾的垃圾图像。在居民投放垃圾之前,可以通过拍照上传等方式获取垃圾分类指导信息。
63.居民上传的第三图像上传至服务器端进行处理。服务器端对接收到的第三图像可以先进行预处理,例如去噪处理、增强处理等。然后将预处理后的第三图像输入至垃圾种类识别模型中,获得垃圾种类识别模型输出的垃圾分类指导信息。
64.为了获取垃圾分类指导信息,需要对垃圾图像进行目标检测。目有很多高精度的目标检测算法,其中基于深度学习的目标检测算法在计算速度和检测精度上都有较好的效果。因此,可以基于样本垃圾图像及预先确定的垃圾种类标签训练构建深度学习神经网络模型,提取图像特征,确定垃圾种类。将垃圾种类区分为:可回收垃圾、有害垃圾、厨余垃圾、建筑垃圾、其他垃圾五种。
65.垃圾种类识别模型输出的垃圾种类仅作为垃圾分类指导信息,指导居民对待投放垃圾进行分类。
66.本技术实施例提供的垃圾回收调度方法,通过图像处理技术和深度学习技术,根据居民投放垃圾之前上传的垃圾图像,为居民提供垃圾分类指导信息,指导居民正确进行垃圾分类,提高了垃圾分类的准确性,降低了因居民无法准确进行垃圾分类带来的后续回收处理的复杂度。
67.可选地,基于第一图像确定第一垃圾堆放量,包括:将第一图像输入至垃圾堆放量
检测模型中,获得垃圾堆放量检测模型输出的第一垃圾堆放量;其中,垃圾堆放量检测模型是基于样本垃圾图像及预先确定的垃圾堆放量标签训练得到的。
68.可选地,基于第二图像确定第二垃圾堆放量,包括:将第二图像输入至垃圾堆放量检测模型中,获得垃圾堆放量检测模型输出的第二垃圾堆放量。
69.具体地,服务器端接收居民端发送的第一图像,对第一图像进行处理。首先可以对第一图像进行预处理以增强有关信息的可检测性和最大限度地简化数据,从而改进特征抽取、图像分割、匹配和识别的可靠性。然后将预处理后的第一图像输出入至垃圾堆放量检测模型中,获得垃圾堆放量检测模型输出的第一垃圾堆放量。
70.同样地,服务器端接收清运人员端发送的第二图像,对第二图像进行预处理后输入至垃圾堆放量检测模型中,获得垃圾堆放量检测模型输出的第二垃圾堆放量。
71.其中,对第一图像和第二图像进行特征提取的垃圾堆放量检测模型可以是相同的模型。由于居民垃圾堆放处垃圾图像和区域垃圾堆放处垃圾图像的差异性,一般来讲,居民垃圾堆放处的垃圾量较少,区域垃圾堆放处的垃圾量较多,因此对第一图像和第二图像可以分别构建相对应的垃圾堆放量检测模型进行特征提取。
72.在此之前,基于样本垃圾图像以及预先确定的垃圾堆放量标签训练构建垃圾堆放量检测模型,提取图像特征,确定垃圾堆放处的垃圾堆放量。
73.本技术实施例提供的垃圾回收调度方法,通过图像处理技术和深度学习技术,根据居民和第一清运人员上传的垃圾图像,识别个垃圾堆放处的垃圾堆放量,从而判断是否需要对对应的垃圾堆放位置的垃圾进行清理,对清运人员进行按需调度,提高清运人员的工作效率。
74.可选地,基于第一垃圾堆放量、第一垃圾堆放时长和第一垃圾堆放位置确定第一清运人员的第一最优路线,包括:确定第一垃圾堆放量超出第一预设阈值的第一垃圾堆放位置为第一清运人员的第一类必经位置;确定第一垃圾堆放时长超出第一预设时长的第一垃圾堆放位置为第一清运人员的第二类必经位置;基于第一类必经位置和第二类必经位置,确定预计清运时长最短的路线为第一最优路线。
75.具体地,对于第一清运人员,需要将各居民垃圾堆放处的垃圾清理运输至区域垃圾堆放处,服务器端基于各居民垃圾堆放处对应的第一垃圾堆放量、第一垃圾堆放时长和第一垃圾堆放位置综合规划第一清运人员的第一最优路线。
76.每一个第一清运人员,管理人员根据其工作范围在服务器端预先分配了其负责的多个居民垃圾堆放处。每一个第一清运人员id匹配有多个居民id或多个第一垃圾堆放位置。
77.当第一垃圾堆放量超出第一预设阈值时,说明对应的第一垃圾堆放位置的垃圾需要清理,确定该第一垃圾堆放位置为第一清运人员的第一类必经位置。例如,居民垃圾桶的垃圾堆放量超出垃圾桶可容纳垃圾容量的75%。
78.当第一垃圾堆放量未超出第一预设阈值,但第一垃圾堆放时长超出第一预设时长时,由于垃圾长期堆积可能产生异味等,因此对应的第一垃圾堆放位置的垃圾需要清理,确定该第一垃圾堆放位置为第一清运人员的第二类必经位置。第一垃圾堆放时长是指第一清运人员上一次对该第一垃圾堆放位置的垃圾进行清理的时间点到对应居民上传第一图像的时间点之间的时间间隔。第一预设时长可以由管理员根据需要在服务器端进行设置,可
以跟随季节等的变化进行更改。例如,夏季设置为2天,冬季设置为3天。例如,设置生活区为3天,餐饮去为2天。
79.对于第一垃圾堆放量未超出第一预设阈值且第一垃圾堆放时长未超出第一预设时长的第一垃圾堆放位置,第一清运人员暂时无需进行清理。
80.基于第一类必经位置和第二类必经位置,可以得到多条路线。确定其中预计清运时长最短的路线为第一最优路线。根据历史数据中第一清运人员清理一个居民垃圾堆放处垃圾的平均时长以及人的平均行走速率,可以计算各条路线的预计清运时长,进而选取第一最优路线。
81.可选地,基于第二垃圾堆放量、第二垃圾堆放时长和第二垃圾堆放位置确定第二清运人员的第二最优路线,包括:确定第二垃圾堆放量超出第二预设阈值的第二垃圾堆放位置为第二清运人员的第三类必经位置;确定第二垃圾堆放时长超出第二预设时长的第二垃圾堆放位置为第二清运人员的第四类必经位置;基于第三类必经位置和第四类必经位置,确定预计清运时长最短的路线为第二最优路线。
82.具体地,对于第二清运人员,需要将各区域垃圾堆放处的垃圾清理运输至垃圾回收站,服务器端基于各区域垃圾堆放处对应的第二垃圾堆放量、第二垃圾堆放时长和第二垃圾堆放位置综合规划第二清运人员的第二最优路线。
83.每一个第二清运人员,管理人员根据其工作范围在服务器端预先分配了其负责的多个区域垃圾堆放处。每一个第二清运人员id匹配多个第一清运人员id或多个第二垃圾堆放位置。
84.当第二垃圾堆放量超出第二预设阈值时,说明对应的第二垃圾堆放位置的垃圾需要清理,确定该第二堆放位置为第二清运人员的第三类必经位置。例如,区域垃圾堆放处的垃圾堆放量超出其可容纳垃圾量的60%。
85.当第二垃圾堆放量未超出第二预设阈值,但第二垃圾堆放时长超出第二预设时长时,由于垃圾长期堆积可能产生异味等,因此对应的第二垃圾堆放位置的垃圾需要清理,确定该第二垃圾堆放位置为第二清运人员的第四类必经位置。第二垃圾堆放时长是指第二清运人员上一次对该第二垃圾堆放位置的垃圾进行清理的时间点到对应的第一清运人员上传第二图像的时间点之间的时间间隔。第二预设时长可以由管理员根据需要在服务器端进行设置。例如,设置市中心夏季为2天,冬季为3天;设置郊区夏季为3天,冬季为4天。
86.对于第二垃圾堆放量未超出第二预设阈值且第二垃圾堆放时长未超出第二预设时长的第二垃圾堆放位置,第二清运人员暂时无需进行清理。
87.基于第三类必经位置和第四类必经位置,可以得到多条路线。确定其中预计清运时长最短的路线为第二最优路线。由于第二清运人员大多借助大型运输工具,例如垃圾运输车对垃圾进行运输,故根据历史数据中第二垃圾清运人员清理一个区域垃圾堆放处垃圾的平均时长以及大型运输工具的平均行驶速率,计算各条路线的预计清运时长,选取其中预计清运时长最短的路线为第二最优路线。
88.本技术实施例提供的垃圾回收调度方法,根据预先获取各垃圾堆放处的垃圾堆放量和垃圾堆放时长,综合规划清运人员的最优路线,按需对垃圾进行清理运输,而非无差别调度,减少资源浪费的同时提高了清运人员的工作效率。
89.图2是本技术实施例提供的垃圾回收调度方法的流程示意图之二,如图2所示,该
方法的执行主体为清运人员设备,例如便携式电子设备“智能回收宝”,该方法至少包括以下步骤。
90.步骤201、接收服务器端发送的第一清运人员的第一最优路线,第一最优路线用于指导第一清运人员将居民垃圾堆放处的垃圾运输至区域垃圾堆放处。
91.具体地,服务器端规划完第一清运人员的第一最优路线后,发送至清运人员端。第一最优路线可以在第一清运人员的操作界面上通过地图的方式显示,第一最优路线指导第一清运人员将居民垃圾堆放处的垃圾运输至区域垃圾堆放处。
92.第一清运人员在实际作业过程中,根据第一最优路线执行垃圾回收任务,清运人员设备可以对第一清运人员的行动轨迹进行记录。
93.步骤202、接收第一清运人员上传的第二图像并发送至服务器端;第二图像为区域垃圾堆放处的垃圾图像。
94.具体地,第一清运人员完成垃圾清运任务后,对区域垃圾堆放处的垃圾图像进行拍照上传。清运人员端将第一清运人员上传的第二图像发送至服务器端进行处理。
95.步骤203、接收服务器端发送的第二清运人员的第二最优路线,第二最优路线用于指导第二清运人员将区域垃圾堆放处的垃圾运输至垃圾回收站。
96.具体地,服务器端基于清运人员端发送的第二图像对第二清运人员的清运路线进行规划,确定第二清运人员的第二最优路线。清运人员端接收到服务器端发送的第二清运人员的第二最优路线,可以在第二清运人员的操作界面上通过地图的方式进行显示,第二最优路线指导第二清运人员将区域垃圾堆放处的垃圾运输至垃圾回收站。
97.本技术实施例提供的垃圾回收调度方法,清运人员端根据服务器端分配的最优路线指导清运人员进行垃圾清理运输,其中第二清运人员的第二最优路线基于第一清运人员上传的图像判断垃圾堆放量和垃圾堆放时长后确定,实现了第一清运人员和第二清运人员的按需调度,提高了清运人员的工作效率。
98.可选地,该方法还包括:接收第一清运人员的第一输入,第一输入用于对居民垃圾分类结果进行判断;将居民垃圾分类的判断结果发送至服务器端。
99.具体地,对于清运人员端,除接收服务器端的工作安排外,还通过服务器端与居民端进行信息交互,对居民垃圾分类结果进行判断。
100.当第一清运人员抵达各居民垃圾堆放处时,由于第一清运人员经过垃圾分类专业培训,可以对居民的垃圾分类结果进行准确判断,各居民垃圾堆放处与居民id匹配,清运人员设备根据第一清运人员的定位或第一清运人员选择的居民垃圾堆放处的位置,实现第一清运人员的判断结果与居民id的匹配。
101.第一输入可以是第一清运人员在清运人员设备屏幕上的点选操作等,第一清运人员通过在屏幕上的点选操作选择垃圾分类正确与否。
102.清运人员设备响应于第一清运人员的第一输入,获取第一清运人员对居民垃圾分类正确与否的判断结果,并将判断结果发送至服务器端。由服务器端对居民积分进行调整,并将调整结果发送至对应的居民端。
103.图3是本技术实施例提供的垃圾回收调度方法的流程示意图之三,如图3所示,该方法的执行主体为居民设备,例如移动终端、移动终端中的app等,该方法至少包括以下步骤。
104.步骤301、接收居民上传的第一图像并发送至服务器端,第一图像为居民垃圾堆放处的垃圾图像,用于确定居民垃圾堆放处的垃圾堆放量。
105.具体地,在居民端,在居民完成垃圾投放之后,拍摄居民垃圾堆放处的垃圾图像上传至居民端。居民端接收到第一图像后发送至服务器端进行处理,第一图像将用于确定居民垃圾堆放处的垃圾堆放量。
106.居民在完成垃圾投放后,除上传垃圾图像外,还可以通过操作界面的快捷键,例如“收取”键,实现一键收取,此时无需上传第一图像。服务器端将该居民对应的居民垃圾堆放处设置为第一清运人员的必经位置。
107.本技术实施例提供的垃圾回收调度方法,通过居民端上传垃圾图像的方式,使得居民参与到垃圾回收调度的环节中,使得服务器端可以预先对各居民垃圾堆放处的垃圾堆放量进行判断,从而规划第一清运人员的最优路线,使得对第一清运人员的调度更加合理,提高了第一清运人员的工作效率。
108.可选地,该方法还包括:接收服务器端发送的居民积分的调整结果,居民积分用于表征居民垃圾分类结果的准确性。
109.具体地,在垃圾分类回收的场景下,可以通过积分的方式对居民垃圾分类结果的准确性进行评判。
110.在第一清运人员抵达各居民垃圾堆放处时,对居民垃圾分类结果进行判断并将判断结果上传至清运人员端。第一清运人员是指经过垃圾分类专业培训的清运人员,可以对垃圾分类结果进行准确性判断。
111.服务器端根据清运人员端发送的居民垃圾分类准确性的判断结果对居民积分进行调整,将居民积分的调整结果发送至居民端。例如,当居民垃圾分类准确性判断为“正确”时增加居民积分,当居民垃圾分类准确性判断为“错误”时不改变居民积分或减少居民积分,具体调整方式本技术并不作出限定。居民设备的可视化界面上对居民积分进行展示。
112.本技术实施例提供的垃圾回收调度方法,通过居民积分表征居民垃圾分类结果的准确性,提升居民垃圾分类意识和垃圾分类积极性。
113.可选地,该方法还包括:接收居民上传的第三图像并发送给服务器端,第三图像为待投放垃圾的垃圾图像;接收服务器端发送的垃圾分类指导信息,垃圾分类指导信息用于指导居民对待投放垃圾进行垃圾分类。
114.具体地,在居民投放垃圾之前,可以通过拍照上传等方式将待投放垃圾的垃圾图像上传至居民端设备,居民端设备接收居民上传的第三图像发送给服务器端。
115.服务器端对第三图像进行处理,基于深度学习和图像处理获取垃圾分类指导信息并发送给居民端。垃圾分类指导信息用于指导居民对待投放垃圾进行垃圾分类
116.居民根据居民设备显示的垃圾分类指导信息进行垃圾分类。
117.本技术实施例提供的垃圾回收调度方法,通过图像处理向居民提供垃圾分类指导信息,指导居民正确进行垃圾分类,提高了垃圾分类的准确性,降低了因居民无法准确进行垃圾分类带来的后续回收处理的复杂度。
118.图4是本技术实施例提供的垃圾回收调度系统的结构示意图,如图4所示,该系统至少包括:
119.服务器子系统401和用户子系统402。
120.其中,服务器子系统401包括:后台服务模块4011,用于实现对各项数据的收发,并通过动态规划方法和深度学习方法对各项数据进行处理,并将数据储存于数据库模块4104中。前台管理模块4012,用于提供可视化的网页管理界面,工作人员可通过该模块实现对后台服务模块4011,事务流调度模块4013和数据库模块4014的管理。事务流调度模块4013,用于根据不同使用者的工作权限和工作之间的依赖关系,调度分配各项工作。数据库模块4014,用于实现对各项数据的储存,并可通过前台管理模块4011对各项数据进行增加,删除,修改,查询等操作。
121.其中,用户子系统402包括居民模块4021和清运人员模块4022。居民模块4021用于执行前述以居民端作为执行主体的方法实施例中的各步骤,清运人员模块4022用于执行前述以清运人员端为执行主体的方法实施例中的各步骤。
122.其中后台服务模块4011通过动态规划方法和深度学习方法对各项数据进行处理,具体包括下述内容。
123.基于深度学习技术和图像处理技术,将居民拍摄的垃圾照片输入至垃圾种类识别模型中,输出垃圾分类指导信息。
124.基于深度学习技术和图像处理技术,将居民垃圾堆放处的垃圾照片输入至垃圾堆放量检测模型,输出居民垃圾堆放处的垃圾堆放量。
125.基于深度学习技术和图像处理技术,将区域垃圾堆放处的垃圾照片输入至垃圾堆放量检测模型,输出区域垃圾堆放处的垃圾堆放量。
126.统计居民垃圾堆放处的垃圾堆放量、垃圾堆放时长、垃圾堆放位置,确定第一清运人员需要清理的多个居民垃圾堆放处,并根据所有居民垃圾堆放处的位置规划第一清运人员的第一最优路线。
127.统计区域垃圾堆放处的垃圾堆放量、垃圾堆放时长、垃圾堆放位置,确定第二清运人员需要清理的多个区域垃圾堆放处,并根据所有区域垃圾堆放处的位置规划第二清运人员的第二最优路线。
128.其中事务流调度模块4013中涉及到的不同使用者包括:居民、第一清运人员、第二清运人员、垃圾站管理人员、服务器程序管理人员等。
129.事务流调度模块4013中不同使用者的工作权限和工作内容,可以区分为下述内容。
130.居民:居民信息注册,上传第一图像,上传第三图像。
131.垃圾站管理人员:第一清运人员信息注册,第二清运人员信息注册,给各居民分配第一清运人员,给第二清运人员分配需要清理的区域垃圾堆放处。
132.第一清运人员:开始保洁任务(开始进行垃圾回收处理),结束保洁任务(将所有居民垃圾堆放处垃圾清理至区域垃圾堆放处),开始保洁子任务(对某一居民垃圾堆放处进行清理),结束保洁子任务(结束某一居民垃圾堆放处垃圾清理任务),判断居民垃圾分类的准确性,上传第二图像。
133.第二清运人员:开始垃圾运输任务(开始垃圾回收处理),结束垃圾运输任务(将所有区域垃圾堆放处垃圾运输至垃圾回收站),开始垃圾运输子任务(对某一区域垃圾堆放处进行清理运输),结束垃圾运输子任务(结束某一区域垃圾堆放处垃圾清理任务)。
134.服务器程序管理人员:设置服务器端的第一预设阈值、第二预设阈值、第一预设时
长、第二预设时长,以确定居民垃圾堆放处垃圾是否需要清理,统计第一清运人员需要清理的居民垃圾堆放处,为第一清运人员规划第一最优路线;确定区域垃圾堆放处是否需要清理,统计第二清运人员需要清理的区域垃圾堆放处,为第二清运人员规划第二最优路线。
135.以第一清运人员为保洁员,第二清运人员为垃圾运输车司机,居民端设备为移动终端上的居民垃圾回收app,清运人员设备为便携式电子设备“智能回收宝”为例,对具体流程进行展开。
136.居民注册流程:居民按户在居民垃圾回收app上进行注册,垃圾站管理人员为居民分配保洁员。
137.居民扔垃圾流程:在扔垃圾前,上传第三图像获取垃圾分类指导信息,进行垃圾分类。在扔垃圾后,上传第一图像以供服务器端识别居民垃圾桶的垃圾堆放量,确定是否需要对居民垃圾桶进行清理。当居民在app界面点击“一键收取”按钮时,无需上传第一图像,服务器端确定该居民门口的垃圾桶需要清理。
138.保洁员任务流程:服务器端统计每一保洁员需要清理的居民垃圾桶,为每一保洁员规划第一最优路线。待保洁员工作时间开始,保洁员根据智能回收宝显示的第一最优路线开始保洁任务,抵达各个居民垃圾桶所在位置,开始多个保洁子任务,对居民垃圾分类结果进行判断并上传判断结果,然后对居民垃圾桶进行清理,直至清理完所有的居民垃圾桶,将垃圾运输至区域垃圾堆放处后上传第二图像,结束保洁任务。
139.垃圾运输车司机流程:服务器端统计每一垃圾运输车司机需要清理的区域垃圾堆放处,为每一垃圾运输车司机规划第二最优路线。待垃圾运输车司机工作时间开始,垃圾运输车司机根据智能回收宝显示的第二最优路线开始运输任务,抵达各个区域垃圾堆放处,开始多个运输子任务,对各个区域垃圾堆放处的垃圾进行清理,直至清理完所有区域垃圾堆放处的垃圾并运输至垃圾回收站,结束运输子任务。
140.数据库模块4014中的各项数据包括下述内容。
141.居民信息:居民姓名(居民id),居民垃圾桶位置,居民垃圾分类积分,负责保洁员id等。
142.新增居民或更换保洁员时管理人员可以从前台管理模块4012手动修改,将新增居民id划分给对应保洁员id,或修改居民id对应的保洁员id。
143.居民垃圾记录:居民投放垃圾后,增加居民id,垃圾照片,垃圾照片上传时间。服务器端根据垃圾图像确定垃圾堆放量,增加至居民垃圾记录中。当保洁员收取垃圾时,增加居民垃圾分类判断结果和保洁员清理时间。
144.保洁员信息:保洁员姓名(保洁员id),保洁员负责的居民垃圾堆放处id。
145.保洁员任务记录:每天早上保洁员工作时间开始时,例如早上8点,增加保洁员id,任务id,任务开始时间。当任务结束后,增加任务结束时间。
146.保洁员子任务记录:当保洁员抵达居民垃圾桶时,增加子任务id和子任务开始时间。清理结束后增加子任务结束时间。
147.保洁员轨迹记录:在保洁员的工作时间内,每间隔一定时间增加保洁员的定位信息,包括:保洁员id,任务id,子任务id,当前位置及时间。
148.垃圾运输车司机信息:垃圾运输车司机姓名(垃圾运输车司机id),垃圾运输车司机负责的区域垃圾堆放处id。
149.垃圾运输车司机任务记录:每天早上垃圾运输车司机工作时间开始时,例如早上8点,增加垃圾运输车司机,任务id,任务开始时间。当任务结束后,增加任务结束时间。
150.垃圾运输车司机子任务记录:当垃圾运输车司机抵达区域垃圾堆放处时,增加子任务id和子任务开始时间,清理结束后增加子任务结束时间。
151.垃圾运输车司机轨迹记录:在垃圾运输车司机的工作时间内,每间隔一定时间增加垃圾运输车司机的定位信息,包括:垃圾运输车司机id,任务id,子任务id,当前位置及时间。
152.图5是本技术实施例提供的智能回收宝的界面示意图,如图5所示,智能回收宝作为一种定制化便携式交互电子设备,专供清运人员使用,其可视化界面包括:登录界面501,拍照上传界面502,任务状态界面503,导航界面504。
153.其中,登录界面501可选择清运人员类型(保洁员或垃圾运输车司机)并进行账号登录。
154.拍照上传界面502为第一保洁人员上传区域垃圾堆放处的垃圾图像的界面。
155.任务状态界面503可以查看当前任务状态并进行状态更换。
156.导航界面504为最优路线的地图显示界面。图中圆圈部分表示待清理的垃圾堆放点,对于保洁员为居民垃圾堆放处,对于垃圾运输车司机为区域垃圾堆放处。
157.图6是本技术实施例提供的垃圾回收调度装置的结构示意图之一,如图6所示,该装置应用于服务器设备,至少包括:
158.第一接收模块601,用于接收居民端发送的第一图像,基于第一图像确定第一垃圾堆放量;第一图像为第一垃圾堆放位置的垃圾图像,第一垃圾堆放位置为居民垃圾堆放处所在的位置;
159.第二接收模块602,用于接收清运人员端发送的第二图像,基于第二图像确定第二垃圾堆放量;第二图像为第二垃圾堆放位置的垃圾图像,第二垃圾堆放位置为区域垃圾堆放处所在的位置;
160.第一发送模块603,用于基于第一垃圾堆放量、第一垃圾堆放时长和第一垃圾堆放位置确定第一清运人员的第一最优路线,并将第一最优路线发送至清运人员端;第一最优路线用于指导第一清运人员将居民垃圾堆放处的垃圾运输至区域垃圾堆放处;
161.第二发送模块604,用于基于第二垃圾堆放量、第二垃圾堆放时长和第二垃圾堆放位置确定第二清运人员的第二最优路线,并将第二最优路线发送至清运人员端;第二最优路线用于指导第二清运人员将区域垃圾堆放处的垃圾运输至垃圾回收站。
162.在此需要说明的是,本技术实施例提供的上述垃圾回收调度装置,能够实现上述执行主体为服务器设备的方法实施例所实现的所有方法步骤,且能够达到相同的技术效果,在此不再对本实施例中与方法实施例相同的部分及有益效果进行具体赘述。
163.图7是本技术实施例提供的垃圾回收调度装置的结构示意图之二,如图7所示,该装置应用于清运人员设备,至少包括:
164.第三接收模块701,用于接收服务器端发送的第一清运人员的第一最优路线,第一最优路线用于指导第一清运人员将居民垃圾堆放处的垃圾运输至区域垃圾堆放处;
165.第四接收模块702,用于接收第一清运人员上传的第二图像并发送至服务器端;第二图像为区域垃圾堆放处的垃圾图像;
166.第五接收模块703,用于接收服务器端发送的第二清运人员的第二最优路线,第二最优路线用于指导第二清运人员将区域垃圾堆放处的垃圾运输至垃圾回收站。
167.在此需要说明的是,本技术实施例提供的上述垃圾回收调度装置,能够实现上述执行主体为清运人员设备的方法实施例所实现的所有方法步骤,且能够达到相同的技术效果,在此不再对本实施例中与方法实施例相同的部分及有益效果进行具体赘述。
168.图8是本技术实施例提供的垃圾回收调度装置的结构示意图之三,如图8所示,该装置应用于居民设备,至少包括:
169.第六接收模块801,用于接收居民上传的第一图像并发送至服务器端,第一图像为居民垃圾堆放处的垃圾图像,用于确定居民垃圾堆放处对应的垃圾堆放量。
170.在此需要说明的是,本技术实施例提供的上述垃圾回收调度装置,能够实现上述执行主体为居民设备的方法实施例所实现的所有方法步骤,且能够达到相同的技术效果,在此不再对本实施例中与方法实施例相同的部分及有益效果进行具体赘述。
171.可选地,本技术实施例还提供一种服务器设备,包括处理器,存储器,存储在存储器上并可在处理器上运行的程序或指令,该程序或指令被处理器执行时实现上述以服务器设备为执行主体的垃圾回收调度方法实施例的各个过程,且能达到相同的技术效果,为避免重复,这里不再赘述。
172.可选地,本技术实施例还提供一种清运人员设备,包括处理器,存储器,存储在存储器上并可在处理器上运行的程序或指令,该程序或指令被处理器执行时实现上述以清运人员设备为执行主体的垃圾回收调度方法实施例的各个过程,且能达到相同的技术效果,为避免重复,这里不再赘述。
173.可选地,本技术实施例还提供一种居民设备,包括处理器,存储器,存储在存储器上并可在处理器上运行的程序或指令,该程序或指令被处理器执行时实现上述以居民设备为执行主体的垃圾回收调度方法实施例的各个过程,且能达到相同的技术效果,为避免重复,这里不再赘述。
174.需要说明的是,本技术实施例中的电子设备包括上述的移动电子设备和非移动电子设备。
175.图9是本技术实施例提供的清运人员设备的硬件结构示意图,如图9所示,该服务器设备包括但不限于:射频单元901、网络模块902、音频输出单元903、输入单元904、传感器905、显示单元906、用户输入单元907、接口单元908、存储器909、以及处理器910等部件。
176.本领域技术人员可以理解,服务器设备900还可以包括给各个部件供电的电源(比如电池),电源可以通过电源管理系统与处理器910逻辑相连,从而通过电源管理系统实现管理充电、放电、以及功耗管理等功能。图9中示出的清运人员设备结构并不构成对清运人员设备的限定,清运人员设备可以包括比图示更多或更少的部件,或者组合某些部件,或者不同的部件布置,在此不再赘述。
177.应理解的是,本技术实施例中,输入单元904可以包括图形处理器(graphics processing unit,gpu)9041和麦克风9042,图形处理器9041对在视频捕获模式或图像捕获模式中由图像捕获装置(如摄像头)获得的静态图片或视频的图像数据进行处理。显示单元906可包括显示面板9061,可以采用液晶显示器、有机发光二极管等形式来配置显示面板9061。用户输入单元907包括触控面板9071以及其他输入设备9072。触控面板9071,也称为
触摸屏。触控面板9071可包括触摸检测装置和触摸控制器两个部分。其他输入设备9072可以包括但不限于物理键盘、功能键(比如音量控制按键、开关按键等)、轨迹球、鼠标、操作杆,在此不再赘述。存储器909可用于存储软件程序以及各种数据,包括但不限于应用程序和操作系统。处理器910可集成应用处理器和调制解调处理器,其中,应用处理器主要处理操作系统、用户界面和应用程序等,调制解调处理器主要处理无线通信。可以理解的是,上述调制解调处理器也可以不集成到处理器910中。
178.其中,处理器910用于接收服务器端发送的第一清运人员的第一最优路线,第一最优路线用于指导第一清运人员将居民垃圾堆放处的垃圾运输至区域垃圾堆放处;
179.用户输入单元907用于接收第一清运人员上传的第二图像并发送至服务器端;第二图像为区域垃圾堆放处的垃圾图像;
180.处理器910还用于接收服务器端发送的第二清运人员的第二最优路线,第二最优路线用于指导第二清运人员将区域垃圾堆放处的垃圾运输至垃圾回收站。
181.用户输入单元907还用于接收第一清运人员的第一输入,第一输入用于对居民垃圾分类结果进行判断。
182.处理器910还用于将居民垃圾分类的判断结果发送至服务器端。
183.此外,本技术还提供一种计算机程序产品,计算机程序产品包括计算机程序,计算机程序可存储在非暂态计算机可读存储介质上,计算机程序被处理器执行时,计算机能够执行上述各方法所提供的垃圾回收调度方法,例如,该方法包括:
184.接收居民端发送的第一图像,基于第一图像确定第一垃圾堆放量;第一图像为第一垃圾堆放位置的垃圾图像,第一垃圾堆放位置为居民垃圾堆放处所在的位置;接收清运人员端发送的第二图像,基于第二图像确定第二垃圾堆放量;第二图像为第二垃圾堆放位置的垃圾图像,第二垃圾堆放位置为区域垃圾堆放处所在的位置;基于第一垃圾堆放量、第一垃圾堆放时长和第一垃圾堆放位置确定第一清运人员的第一最优路线,并将第一最优路线发送至清运人员端;第一最优路线用于指导第一清运人员将居民垃圾堆放处的垃圾运输至区域垃圾堆放处;基于第二垃圾堆放量、第二垃圾堆放时长和第二垃圾堆放位置确定第二清运人员的第二最优路线,并将第二最优路线发送至清运人员端;第二最优路线用于指导第二清运人员将区域垃圾堆放处的垃圾运输至垃圾回收站;
185.或,接收服务器端发送的第一清运人员的第一最优路线,第一最优路线用于指导第一清运人员将居民垃圾堆放处的垃圾运输至区域垃圾堆放处;接收第一清运人员上传的第二图像并发送至服务器端;第二图像为区域垃圾堆放处的垃圾图像;接收服务器端发送的第二清运人员的第二最优路线,第二最优路线用于指导第二清运人员将区域垃圾堆放处的垃圾运输至垃圾回收站;
186.或,接收居民上传的第一图像并发送至服务器端,第一图像为居民垃圾堆放处的垃圾图像,用于确定居民垃圾堆放处对应的垃圾堆放量。
187.此外,本技术还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现以执行上述各方法提供的垃圾回收调度方法,例如,该方法包括:
188.接收居民端发送的第一图像,基于第一图像确定第一垃圾堆放量;第一图像为第一垃圾堆放位置的垃圾图像,第一垃圾堆放位置为居民垃圾堆放处所在的位置;接收清运
人员端发送的第二图像,基于第二图像确定第二垃圾堆放量;第二图像为第二垃圾堆放位置的垃圾图像,第二垃圾堆放位置为区域垃圾堆放处所在的位置;基于第一垃圾堆放量、第一垃圾堆放时长和第一垃圾堆放位置确定第一清运人员的第一最优路线,并将第一最优路线发送至清运人员端;第一最优路线用于指导第一清运人员将居民垃圾堆放处的垃圾运输至区域垃圾堆放处;基于第二垃圾堆放量、第二垃圾堆放时长和第二垃圾堆放位置确定第二清运人员的第二最优路线,并将第二最优路线发送至清运人员端;第二最优路线用于指导第二清运人员将区域垃圾堆放处的垃圾运输至垃圾回收站;
189.或,接收服务器端发送的第一清运人员的第一最优路线,第一最优路线用于指导第一清运人员将居民垃圾堆放处的垃圾运输至区域垃圾堆放处;接收第一清运人员上传的第二图像并发送至服务器端;第二图像为区域垃圾堆放处的垃圾图像;接收服务器端发送的第二清运人员的第二最优路线,第二最优路线用于指导第二清运人员将区域垃圾堆放处的垃圾运输至垃圾回收站;
190.或,接收居民上传的第一图像并发送至服务器端,第一图像为居民垃圾堆放处的垃圾图像,用于确定居民垃圾堆放处对应的垃圾堆放量。
191.以上所描述的装置实施例仅仅是示意性的,其中作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部模块来实现本实施例方案的目的。本领域普通技术人员在不付出创造性的劳动的情况下,即可以理解并实施。
192.通过以上的实施方式的描述,本领域的技术人员可以清楚地了解到各实施方式可借助软件加必需的通用硬件平台的方式来实现,当然也可以通过硬件。基于这样的理解,上述技术方案本质上或者说对现有技术做出贡献的部分可以以软件产品的形式体现出来,该计算机软件产品可以存储在计算机可读存储介质中,如rom/ram、磁碟、光盘等,包括若干指令用以使得一台计算机设备(可以是个人计算机,服务器,或者网络设备等)执行各个实施例或者实施例的某些部分的方法。
193.最后应说明的是:以上实施例仅用以说明本技术的技术方案,而非对其限制;尽管参照前述实施例对本技术进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本技术各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
