技术特征:
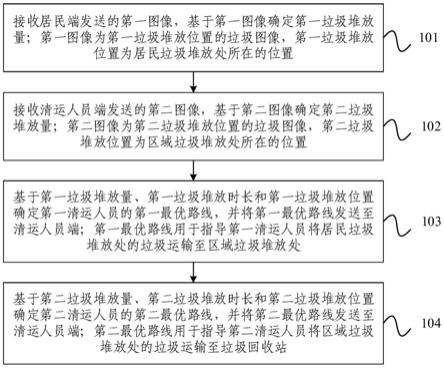
1.一种垃圾回收调度方法,其特征在于,应用于服务器设备,包括:接收居民端发送的第一图像,基于所述第一图像确定第一垃圾堆放量;所述第一图像为第一垃圾堆放位置的垃圾图像,所述第一垃圾堆放位置为居民垃圾堆放处所在的位置;接收清运人员端发送的第二图像,基于所述第二图像确定第二垃圾堆放量;所述第二图像为第二垃圾堆放位置的垃圾图像,所述第二垃圾堆放位置为区域垃圾堆放处所在的位置;基于所述第一垃圾堆放量、第一垃圾堆放时长和第一垃圾堆放位置确定第一清运人员的第一最优路线,并将所述第一最优路线发送至所述清运人员端;所述第一最优路线用于指导所述第一清运人员将居民垃圾堆放处的垃圾运输至区域垃圾堆放处;基于所述第二垃圾堆放量、第二垃圾堆放时长和第二垃圾堆放位置确定第二清运人员的第二最优路线,并将所述第二最优路线发送至所述清运人员端;所述第二最优路线用于指导所述第二清运人员将区域垃圾堆放处的垃圾运输至垃圾回收站。2.根据权利要求1所述的垃圾回收调度方法,其特征在于,还包括:接收所述清运人员端发送的居民垃圾分类的判断结果;基于所述判断结果对居民积分进行调整,并将调整结果发送至所述居民端。3.根据权利要求1所述的垃圾回收调度方法,其特征在于,还包括:接收所述居民端发送的第三图像;所述第三图像为居民上传的待投放垃圾的垃圾图像;将所述第三图像输入至垃圾种类识别模型中,获得所述垃圾种类识别模型输出的垃圾分类指导信息;其中,所述垃圾种类识别模型是基于样本垃圾图像及预先确定的垃圾种类标签训练后得到的,所述垃圾分类指导信息用于指导居民对待投放垃圾进行垃圾分类;将所述垃圾分类指导信息发送至所述居民端。4.根据权利要求1所述的垃圾回收调度方法,其特征在于,所述基于所述第一图像确定第一垃圾堆放量,包括:将所述第一图像输入至垃圾堆放量检测模型中,获得所述垃圾堆放量检测模型输出的所述第一垃圾堆放量;其中,所述垃圾堆放量检测模型是基于样本垃圾图像及预先确定的垃圾堆放量标签训练得到的;所述基于所述第二图像确定第二垃圾堆放量,包括:将所述第二图像输入至所述垃圾堆放量检测模型中,获得所述垃圾堆放量检测模型输出的所述第二垃圾堆放量。5.根据权利要求1所述的垃圾回收调度方法,其特征在于,所述基于所述第一垃圾堆放量、第一垃圾堆放时长和第一垃圾堆放位置确定第一清运人员的第一最优路线,包括:确定第一垃圾堆放量超出第一预设阈值的第一垃圾堆放位置为所述第一清运人员的第一类必经位置;确定第一垃圾堆放时长超出第一预设时长的第一垃圾堆放位置为所述第一清运人员的第二类必经位置;基于所述第一类必经位置和所述第二类必经位置,确定预计清运时长最短的路线为所述第一最优路线;所述基于所述第二垃圾堆放量、第二垃圾堆放时长和第二垃圾堆放位置确定第二清运
人员的第二最优路线,包括:确定第二垃圾堆放量超出第二预设阈值的第二垃圾堆放位置为所述第二清运人员的第三类必经位置;确定第二垃圾堆放时长超出第二预设时长的第二垃圾堆放位置为所述第二清运人员的第四类必经位置;基于所述第三类必经位置和所述第四类必经位置,确定预计清运时长最短的路线为所述第二最优路线。6.一种垃圾回收调度方法,其特征在于,应用于清运人员设备,包括:接收服务器端发送的第一清运人员的第一最优路线,所述第一最优路线用于指导所述第一清运人员将居民垃圾堆放处的垃圾运输至区域垃圾堆放处;接收所述第一清运人员上传的第二图像并发送至所述服务器端;所述第二图像为区域垃圾堆放处的垃圾图像;接收所述服务器端发送的第二清运人员的第二最优路线,所述第二最优路线用于指导所述第二清运人员将区域垃圾堆放处的垃圾运输至垃圾回收站。7.根据权利要求6所述的垃圾回收调度方法,其特征在于,还包括:接收所述第一清运人员的第一输入,所述第一输入用于对居民垃圾分类结果进行判断;将居民垃圾分类的判断结果发送至服务器端。8.一种垃圾回收调度方法,其特征在于,应用于居民设备,包括:接收居民上传的第一图像并发送至服务器端,所述第一图像为居民垃圾堆放处的垃圾图像,用于确定所述居民垃圾堆放处对应的垃圾堆放量。9.根据权利要求8所述的垃圾回收调度方法,其特征在于,还包括:接收所述服务器端发送的居民积分的调整结果,所述居民积分用于表征居民垃圾分类结果的准确性。10.根据权利要求9所述的垃圾回收调度方法,其特征在于,还包括:接收居民上传的第三图像并发送给所述服务器端,所述第三图像为待投放垃圾的垃圾图像;接收所述服务器端发送的垃圾分类指导信息,所述垃圾分类指导信息用于指导居民对待投放垃圾进行垃圾分类。
技术总结
本申请提供一种垃圾回收调度方法,包括:接收居民端发送的第一图像,基于第一图像确定居民垃圾堆放处的第一垃圾堆放量,第一图像为居民垃圾堆放处的垃圾图像;接收清运人员端发送的第二图像,基于第二图像确定区域垃圾堆放处的第二垃圾堆放量,第二图像为区域垃圾堆放处的垃圾图像;基于第一垃圾堆放量、第一垃圾堆放时长和第一垃圾堆放位置确定第一清运人员的第一最优路线,并发送至清运人员端,指导第一清运人员将居民垃圾堆放处的垃圾运输至区域垃圾堆放处;基于第二垃圾堆放量、第二垃圾堆放时长和第二垃圾堆放位置确定第二清运人员的第二最优路线,并发送至清运人员端,指导第二清运人员将区域垃圾堆放处的垃圾运输至垃圾回收站。至垃圾回收站。至垃圾回收站。
技术研发人员:赵玥 周希博 刘雷 张鹏翀
受保护的技术使用者:北京林业大学
技术研发日:2022.01.11
技术公布日:2022/4/26
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。