1.本公开涉及车辆的制动控制装置。
背景技术:
2.在专利文献1中,以“提供能够降低制动力对驾驶员的制动操作的响应延迟的制动控制装置、制动控制方法以及制动系统”为目的,记载了“若输入规定的信息,则主活塞32p移动,从而使连接产生制动液压的主缸3的主液压室31p与p系统的轮缸8a、8d的第一液路11p产生基于驾驶员的制动踏板操作的制动液压,而最大行程量比主活塞32p短的副活塞32s移动,从而通过与主缸3不同的液压源(泵7)使连接产生制动液压的主缸3的副液压室31s与s系统的轮缸8b、8c的第一液路11s产生制动液压。规定的信息是表示检测与主缸连接的储液罐中存积的制动液的液位的液面传感器的检测值低于液面降低阈值的信息”。
3.在专利文献1所记载的控制装置中,在产生液面降低的情况下,可能产生车辆的偏转。以下,对其理由进行说明。在该状况下,作为p系统的左前轮、右后轮的轮缸8a、8d根据驾驶员的制动踏板操作而被主缸加压。另一方面,s系统的右前轮、左后轮的轮缸8b、8c被与主缸3不同的液压源(泵7)加压。通常,泵等液压源的加压量比基于驾驶员的制动踏板操作的加压量大。因此,在p系统的轮缸与s系统的轮缸之间产生液压差(结果,产生制动力的左右差),所以车辆朝向右方偏转。在这样的制动控制装置中,期望能够抑制车辆偏转。
4.在专利文献2中,以“提供能够抑制储液部的制动液量的降低的制动器装置、制动系统以及制动器装置的控制方法”为目的,记载了“控制单元100在使轮缸液压pw向零降低的过程中,与使调压阀27从闭阀状态移至开阀状态的定时相比,延迟使遮挡阀21从闭阀状态移至开阀状态的定时以及使连通阀26从开阀状态移至闭阀状态的定时”。在专利文献2的控制装置中,能够抑制储液部(也称为“主储存器”)的制动液量的降低(即,制动液的外部泄漏),但在这样的制动控制装置中,除了抑制制动液量的降低之外,还期望在产生制动液的外部泄漏的情况下,能够适当地确保车辆减速。
5.专利文献1:日本特开2019-085028号
6.专利文献2:日本特开2018-176757号
技术实现要素:
7.本发明的目的在于提供在车辆的制动控制装置中,在产生制动液的外部泄漏的情况下,抑制车辆偏转,并且能够适当地确保车辆减速度的技术。
8.本发明所涉及的车辆的制动控制装置具备:“能够与车辆的制动操作部件(bp)的动作联动地压送制动液(bf)的主缸(cm)”、“被电驱动的流体单元(hu)”、“设置于上述车辆的前轮、后轮(whf、whr),并由上述主缸(cm)、以及上述流体单元(hu)中的任意一方加压的前轮、后轮轮缸(cwf、cwr)”以及“控制上述流体单元(hu)的控制器(ecu)”。而且,上述控制器(ecu)判定在上述制动控制装置中是否产生制动液(bf)的外部泄漏,在产生上述外部泄漏的情况下,通过上述主缸(cm)对上述前轮轮缸(cwf)进行加压,并通过上述流体单元(hu)
对上述后轮轮缸(cwr)进行加压。根据上述结构,避免车辆的偏转,并且可以确保足够的车辆减速度。
9.对于本发明所涉及的车辆的制动控制装置来说,上述流体单元(hu)包含用于执行抑制上述前轮、后轮(whf、whr)的过大的减速滑移的防抱死制动控制的液压调节器(vi、vo),在产生上述外部泄漏的情况下,上述控制器(ecu)禁止针对上述前轮(whf)的上述防抱死制动控制的工作,并允许针对上述后轮(whr)的上述防抱死制动控制的工作。根据上述结构,由于能够充分地活用前轮的制动力,并且抑制后轮的过大的减速滑移,所以适当地确保车辆减速度,可以提高车辆的方向稳定性。
附图说明
10.图1是用于说明车辆的制动控制装置sc的第一实施方式的整体构成图。
11.图2是用于说明外部泄漏控制的处理的流程图。
12.图3是用于说明车辆的制动控制装置sc的第二实施方式的示意图。
具体实施方式
13.<构成部件等的符号、符号末尾的角标>
14.在以下的说明中,如“cw”等那样附加了同一符号的构成部件、运算处理、信号、特性以及值具有同一功能。附加在各车轮所涉及的符号末尾的角标“f”、“r”是表示在车辆的前后方向上,其与哪个方向相关的概括符号。具体而言,“f”是前轮所涉及的符号,“r”是后轮所涉及的符号。例如,在轮缸中,表述为前轮轮缸cwf、以及后轮轮缸cwr。并且,能够省略角标“f”、“r”。此时,各符号表述总称。
15.在连接路hs中,接近主储存器rv的一侧(或者,远离轮缸cw的一侧)被称为“上部”,接近轮缸cw的一侧被称为“下部”。另外,在制动液bf循环的回流路hk中,接近流体泵hp的排出部bt的一侧被称为“上游侧(上游部)”,远离排出部bt的一侧被称为“下游侧(下游部)”。
16.<车辆的制动控制装置的第一实施方式>
17.参照图1的整体构成图,对本发明所涉及的制动控制装置sc的第一实施方式进行说明。在第一实施方式中,在两个系统的流体路(制动系统)中,前轮制动系统bkf与前轮whf的轮缸cwf连接,后轮制动系统bkr与后轮whr的轮缸cwr连接。例如,采用所谓的前后型(也称为“ii型”)的流体路,作为两个系统的流体路。该情况下,前轮制动系统bkf是前轮所涉及的制动系统,前轮液压室rmf与两个前轮轮缸连接。另外,后轮制动系统bkr是后轮所涉及的制动系统,后轮液压室rmr与两个后轮轮缸连接。这里,“流体路”是用于供作为工作液的制动液bf移动的路径,相当于制动配管、流体单元的流路、软管等。
18.在具备制动控制装置sc的车辆中设置制动操作部件bp、旋转部件kt、轮缸cw、主储存器rv、主缸cm、制动操作量传感器ba以及车轮速度传感器vw。
19.制动操作部件(例如,制动踏板)bp是驾驶员为了使车辆减速而操作的部件。通过操作制动操作部件bp,从而调整车轮wh的制动转矩tq,在车轮wh产生制动力。具体而言,在车辆的车轮wh固定旋转部件(例如,制动盘)kt。而且,将制动钳配置为夹持旋转部件kt。
20.在制动钳设置有轮缸cw。通过增加轮缸cw内的制动液bf的压力(制动液压)pw,从而摩擦部件(例如,制动块)被推压至旋转部件kt。由于旋转部件kt和车轮wh被固定为一体
地旋转,所以通过此时产生的摩擦力,在车轮wh产生制动转矩tq。而且,通过制动转矩tq,在车轮wh产生制动力(摩擦制动力)。
21.主储存器(也称为“大气压储存器”)rv是工作液体用的罐,在其内部储藏制动液bf。通过主储存器rv对主缸cm等补给制动液bf。主储存器rv通过高度sk的分隔板sk被划分为三个蓄液部rvf、rvr、rvc。前轮、后轮蓄液部rvf、rvr与前轮、后轮液压室rmf、rmr连接,并对它们供给制动液bf。调压蓄液部rvc经由储存器路hv与流体泵hp连接,供给制动液bf。在主储存器rv内充满制动液bf的状态下,制动液bf的液面在分隔板sk的高度sk之上。因此,制动液bf能够超过分隔板sk而在各蓄液部之间自由地移动。另一方面,若主储存器rv内的制动液bf的量减少,而制动液bf的液面比分隔板sk的高度sk低,则前轮、后轮蓄液部rvf、rvr以及调压蓄液部rvc分别成为独立的蓄液器。在主储存器rv设置检测制动液bf的液面高度sh(相当于“剩余量mb”)的液面传感器sh。
22.主缸cm经由制动杆rd等与制动操作部件bp机械连接。采用串联型的主缸作为主缸cm。在主缸cm的内部,通过主活塞pg以及副活塞ph形成两个液压室(前轮、后轮液压室)rmf、rmr。在未操作制动操作部件bp的情况下,主缸cm的前轮、后轮液压室rmf、rmr与主储存器rv被设为连通状态,使得在制动液bf不足的情况下,补给制动液bf。
23.若制动操作部件bp被操作,则主缸cm内的主、副活塞pg、ph被向前进方向ha推压,从主储存器rv切断液压室rm(=rmf、rmr)。并且,若增加制动操作部件bp的操作,则活塞pg、ph向前进方向ha移动,液压室rm的体积减少,制动液(工作流体)bf从主缸cm排出。若减少制动操作部件bp的操作,则活塞pg、ph向后退方向hb移动,液压室rm的体积增加,制动液bf返回到主缸cm。
24.串联型主缸cm的前轮液压室rmf与两个(左右的)前轮轮缸cwf通过前轮连接路hsf连接。另外,后轮液压室rmr与两个(左右的)后轮轮缸cwr通过后轮流体路hsr连接。前轮、后轮连接路hsf、hsr是流体路,其内部被制动液bf充满。前轮、后轮连接路hsf、hsr在分支部bbf、bbr分支为两个,并与左右的前轮、后轮轮缸cwf、cwr连接。
25.通过制动操作量传感器ba检测驾驶员对制动操作部件(制动踏板)bp的操作量ba。具体而言,采用检测液压室rm内的液压(主缸液压)pm(=pmf、pmr)的主缸液压传感器pm(=pmf、pmr)、检测制动操作部件bp的操作位移sp的操作位移传感器sp以及检测制动操作部件bp的操作力fp的操作力传感器fp中的至少一个,作为制动操作量传感器ba。换句话说,操作量传感器ba是主缸液压传感器pm、操作位移传感器sp以及操作力传感器fp的通称,操作量ba是主缸液压pm、操作位移sp、以及操作力fp的总称。
26.通过车轮速度传感器vw检测各车轮wh的旋转速度、亦即车轮速度vw。在抑制车轮wh的抱死趋势(即,过大的减速滑移)的防抱死制动控制等中采用车轮速度vw的信号。由车轮速度传感器vw检测出的各车轮速度vw被输入到控制器ecu。在控制器ecu中,基于车轮速度vw来运算车体速度vx。
27.《制动控制装置sc》
28.制动控制装置sc由行程模拟器ss、模拟器阀vs、流体单元hu以及控制器ecu构成。
29.为了使制动操作部件bp产生操作力fp而设置行程模拟器(也仅称为“模拟器”)ss。换句话说,通过模拟器ss形成制动操作部件bp的操作特性(操作力fp相对于操作位移sp的关系)。模拟器ss与主缸cm(例如,前轮液压室rmf)连接。在模拟器ss的内部具备模拟器活塞
以及弹性体(例如,压缩弹簧)。若制动液bf从前轮液压室rmf移动到模拟器ss,则通过流入的制动液bf推压模拟器活塞。在模拟器活塞中,通过弹性体向阻止制动液bf的流入的方向施加力,所以在制动操作部件bp被操作的情况下,产生与该操作位移sp相应的操作力fp。
30.在前轮液压室rmf与模拟器ss之间设置有模拟器阀vs。模拟器阀vs是常闭型的电磁阀(开/关阀)。在“开/关阀”中,选择性地实现打开位置和关闭位置。若启动制动控制装置sc,则使模拟器阀vs开阀,使主缸cm与模拟器ss成为连通状态。此外,在前轮液压室rmf的容量与前轮轮缸cwf的容量相比较足够大的情况下,也可以省略模拟器阀vs。另外,模拟器ss也可以与后轮液压室rmr连接。
31.流体单元hu构成为包括:前轮、后轮分离阀vmf、vmr、前轮、后轮主缸液压传感器pmf、pmr、调压单元yc、前轮、后轮联络阀vrf、vrr、前轮、后轮调整液压传感器ppf、ppr、前轮、后轮入口阀vif、vir、以及前轮、后轮出口阀vof、vor。
32.前轮、后轮分离阀vmf、vmr设置于前轮、后轮连接路hsf、hsr。模拟器ss与前轮液压室rmf连接。前轮、后轮分离阀vmf、vmr是具有打开位置和关闭位置的常开型的电磁阀(开/关阀)。在制动控制装置sc启动时,使前轮、后轮分离阀vmf、vmr闭阀,使主缸cm与前轮、后轮轮缸cwf、cwr成为切断状态(非连通状态)。换句话说,通过前轮、后轮分离阀vmf、vmr的关闭位置,使主缸cm与前轮、后轮轮缸cwf、cwr的连接分离。
33.在前轮、后轮分离阀vmf、vmr的上部设置前轮、后轮主缸液压传感器pmf,pmr,以检测前轮、后轮液压室rmf、rmr的液压(主缸液压)pmf、pmr。主缸液压传感器pm(=pmf、pmr)相当于操作量传感器ba,主缸液压pm相当于操作量ba。此外,前轮、后轮主缸液压pmf、pmr实际上相同,所以能够省略前轮、后轮主缸液压传感器pmf、pmr中的任意一个。
34.-调压单元yc(第一实施方式)-
35.对第一实施方式所涉及的调压单元yc进行说明。在调压单元yc中,通过由电动马达mt驱动的流体泵hp形成制动液bf的循环流kn。通过利用调压阀ua对该循环流kn进行节流,从而调整调整液压pp。而且,被调节为调整液压pp的制动液bf供给至前轮、后轮轮缸cwf、cwr。
36.以下,对调压单元yc的详细进行描述。流体泵hp设置于回流路hk。回流路hk是与前轮、后轮连接路hsf、hsr并列地设置的流体路,将流体泵hp的吸入部bs与排出部bt连接。流体泵hp由电动马达mt驱动。将电动马达mt与流体泵hp固定,以使流体泵hp与电动马达mt一体地旋转。若对电动马达mt进行旋转驱动,则在回流路hk中,如虚线箭头所示,产生制动液bf的回流kn(“bt
→
bvf
→
bvr
→
bw
→
bx
→
bs
→
bt”的流路)。这里,“回流”是指制动液bf循环,并再次返回到原来的流路。在回流路hk设置止回阀(也称为“检查阀”),以使制动液bf不倒流。
37.在回流路hk设置调压阀ua。调压阀ua是常开型的线性电磁阀(是连续地调整开阀量的电磁阀,也被称为“比例阀”、“差压阀”)。通过调压阀ua对制动液bf的循环流kn进行节流,以调节调压阀ua的上游部(例如,部位bvf、bvr)的液压pp(称为“调整液压”)。换句话说,流体泵hp排出的制动液bf的压力由调压阀ua调节为调整液压pp。
38.回流路hk在部位bx连接低压储存器rw。低压储存器rw是用于向流体泵hp供给制动液bf的储藏与主储存器rv不同(其它)的制动液bf的罐(蓄液器)。在低压储存器rw的缸内部设置储存器活塞。通过储存器活塞,缸的内部被划分为充满制动液bf的液体室rw(也称为“低压储存器室”)、和充满气体的气体室。在液体室rw的内部收容有压缩弹簧,以朝向气体室推压储存器活塞。
39.低压储存器rw靠近流体泵hp(特别是,吸入部bs)而设置。例如,一体地组装流体单元hu,使得低压储存器rw内置于流体单元hu内。或者,低压储存器rw能够利用较短的配管与流体单元hu连接。换句话说,低压储存器rw(特别是,液体室rw)配置在流体泵hp的附近。因此,能够减少管路阻力等,在制动液压pw增加时,能够提高其响应性。
40.为了使低压储存器rw小型化,回流路hk经由作为流体路的储存器路hv与主储存器rv(特别是,调压蓄液部rvc)连接。在制动初始,从低压储存器rw吸入制动液bf,所以改善制动液压pw的升压响应性。此外,在流体泵hp中,从主储存器rv充分吸入制动液bf的情况下,也可以省略低压储存器rw。
41.调压单元yc的回流路hk与前轮、后轮连接路hsf、hsr通过前轮、后轮联络路hrf、hrr连接。具体而言,前轮、后轮连接路hsf、hsr是连结前轮、后轮连接路hsf、hsr的前轮、后轮分离阀vmf、vmr的下部buf、bur以及流体泵hp的排出部bt的下游部(调压阀ua的上游部)bvf、bvr的流体路。在前轮、后轮联络路hrf、hrr设置前轮、后轮联络阀vrf、vrr。联络阀vr(=vrf、vrr)是具有打开位置和关闭位置的常闭型的开/关阀。在制动控制装置sc启动时,使联络阀vr开阀,使连接路hs(=hsf、hsr)与回流路hk成为连通状态。通过调压单元yc调节为调整液压pp的制动液bf供给至前轮、后轮轮缸cwf、cwr。在前轮、后轮连接路hsf、hsr设置前轮、后轮调整液压传感器ppf、ppr,以检测调整液压pp。
42.在前轮、后轮连接路hsf、hsr中,从分支部bbf、bbr开始下部(接近轮缸cw的一侧)的构成相同。在连接路hs(=hsf、hsr)设置入口阀vi(=vif、vir)。采用常开型的开/关电磁阀,作为入口阀vi。
43.在入口阀vi的下部bg(即,入口阀vi与轮缸cw之间)与减压路hg连接。减压路hg与低压储存器rw(也是“流体泵hp的吸入部bs”)连接。在减压路hg设置出口阀vo(=vof、vor)。采用常闭型的开/关电磁阀,作为出口阀vo。入口阀vi以及出口阀vo总称而称为“液压调节器”。
44.通过控制器(也称为“电子控制单元”)ecu控制电动马达mt以及电磁阀ua、vm、vr、vs、vi、vo。控制器ecu包含安装有微处理器mp等的电路基板、和在微处理器mp中编程的控制算法。控制器ecu经由车载通信总线bs与其它系统的控制器(电子控制单元)网络连接。
45.通过控制器ecu,基于各种信号(ba、pp、vw、sh等)控制电动马达mt以及电磁阀(vm等)。具体而言,基于微处理器mp内的控制算法来运算用于控制电动马达mt的马达驱动信号mt。同样地,运算用于控制电磁阀ua、vm、vr、vs、vi、vo的电磁阀驱动信号ua、vm、vr、vs、vi、vo。然后,基于这些驱动信号(vm、mt等)驱动电动马达以及多个电磁阀。
46.在常用制动时,通过控制器ecu驱动调压单元yc,执行液压伺服控制。这里,“液压伺服控制”是指使实际的前轮、后轮调整液压ppf、ppr(结果,前轮、后轮制动液压pwf、pwr)与基于制动操作量ba等运算出的目标液压pt一致的控制。例如,在液压伺服控制中,决定为目标液压pt随着制动操作量ba的增加而增加,并对向调压阀ua的通电量进行反馈控制,以使目标液压pt与调整液压pp(检测值)的偏差接近“0”。
47.另外,在车轮wh的减速滑移过大的情况下,通过利用控制器ecu控制入口阀vi、出口阀vo(即,液压调节器),来进行防抱死制动控制(也称为“abs控制”)。具体而言,在防抱死
制动控制中,为了减少轮缸cw内的液压pw,而使入口阀vi为关闭位置,使出口阀vo为打开位置。阻止制动液bf从入口阀vi流入,轮缸cw内的制动液bf向低压储存器rw流出,从而减少制动液压pw。另外,为了增加制动液压pw,而使入口阀vi为打开位置,使出口阀vo为关闭位置。阻止制动液bf向低压储存器rw流出,调整液压pp被导入轮缸cw,从而增加制动液压pw。并且,为了保持轮缸cw内的液压(制动液压)pw,而使入口阀vi以及出口阀vo都闭阀。换句话说,通过控制液压调节器vi、vo,能够在各车轮wh的轮缸cw独立地调整制动液压pw(即,制动转矩tq)。
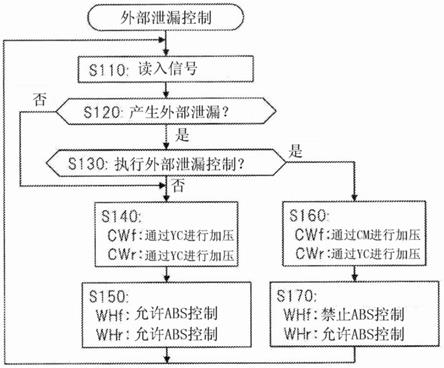
48.<外部泄漏控制的处理>
49.参照图2的流程图,对外部泄漏控制的处理进行说明。这里,“外部泄漏”是指制动液bf从制动控制装置sc泄漏到外部。若产生外部泄漏,则补给制动液bf的不足量的主储存器rv内的液量减少(即,主储存器rv内的制动液bf的液面降低)。由于包含主储存器rv以及轮缸cw的从主储存器rv到轮缸cw为止的流体路(hs、hr等)、电磁阀(vm、ua等)、流体泵hp等的破损而产生外部泄漏,但难以确定在哪个部位产生外部泄漏。“外部泄漏控制”是识别上述的外部泄漏的产生的情况下的控制处理。通过外部泄漏控制确保车辆的减速度以及稳定性。
50.在步骤s110,读入制动操作量ba、调整得液压pp、车轮速度vw、在制动控制装置sc内剩余的制动液bf的量(称为“剩余量”)mb等各种信号。例如,剩余量mb是基于由液面传感器sh检测到的液面高度sh运算出的信号。另外,剩余量mb是与在主储存器rv内剩余的制动液bf的量相关的信号。或者,如后述那样,剩余量mb也可以是基于电动马达mt的旋转角ka(即,调压活塞pc的位移)与调整液压pp的关系运算出的。在步骤s110中读入的信号(mb等)也可以通过经由通信总线bs将由其它控制器运算出的信号发送至控制器ecu来进行获取。
51.在步骤s120中,判定“是否产生制动液bf的外部泄漏”。对于外部泄漏的产生,例如判定“剩余量mb是否是判定规定量mh以下”。这里,判定规定量mh判定规定量mh是用于判定外部泄漏的产生的预先设定的规定值(判定阈值、常数)。例如,在“mb>mh”,在未产生外部泄漏的情况下,步骤s120被否定,处理进入步骤s140。
52.另一方面,在产生制动液bf的外部泄漏的情况下(例如,剩余量mb为判定规定量mh以下的情况下),首先,对驾驶员报告产生外部泄漏。外部泄漏的产生通过视觉(例如,灯的点亮)、听觉(例如,报告声音)、触觉(例如,报告用的振动)等通知给驾驶员。而且,在步骤s120被肯定的情况下,处理进入步骤s130。
53.在步骤s130中,“判定是否执行外部泄漏控制”。例如,基于“制动控制装置sc(主储存器rv等)内的制动液bf的剩余量mb是否是执行规定量mx以下”来进行该判定。这里,执行规定量mx(相当于“规定量”)是预先设定的规定值(阈值、常数)。执行规定量mx被设定为比判定规定量mh小的值(即,“mx<mh”)。由此,在外部泄漏控制开始执行前,对驾驶员报告产生外部泄漏。
54.采用主储存器rv内的制动液面的高度sh,作为执行规定量mx。该情况下,执行规定量mx可以设定为比分隔板sk的高度sk高。通过该设定,能够在蓄液部rvf、rvr、rvc成为单独的蓄液器之前,提早开始执行外部泄漏控制。除此之外,能够通过一个液面传感器sh检测剩余量mb(液面高度sh)。此外,也可以使液面传感器sh的检测部双重化,以确保冗余性。
55.在外部泄漏控制的执行被否定的情况下(例如,“mb>mx”的情况下),步骤s130被
否定,处理进入步骤s140。在外部泄漏控制的执行被否定的情况下(例如,“mb≤mx”的情况下),步骤s130被肯定,处理进入步骤s160。
56.在步骤s140中,由于外部泄漏的产生被否定,所以进行通常的液压伺服控制(后述的“伺服制动”)。换句话说,通过调压单元yc对前轮、后轮轮缸cwf、cwr的液压pwf、pwr进行加压。具体而言,在液压伺服控制中,决定为使分离阀vm闭阀,使联络阀vr开阀,目标液压pt根据制动操作量ba的增加而增加。基于调整液压pp的检测值进行反馈控制,以使调整液压pp接近目标液压pt,并一致。然后,由调压单元yc调节为调整液压pp的制动液bf被供给至前轮、后轮轮缸cwf、cwr。
57.在步骤s150中,一并允许对前轮whf、后轮whr的防抱死制动控制(abs控制)的工作。换句话说,在车轮wh产生过大的减速滑移的情况下,经由液压调节器vi、vo进行通常的防抱死制动控制。
58.在步骤s160、s170中,执行外部泄漏控制。首先,在步骤s160中,通过主缸cm对左右的前轮轮缸cwf的液压(前轮制动液压)pwf进行加压。换句话说,使前轮分离阀vmf开阀,并使前轮联络阀vrf闭阀,仅通过驾驶员的力量(操作力fp)增加前轮制动液压pwf。仅基于驾驶员的力量的制动被称为“手动制动”。另一方面,使后轮分离阀vmr闭阀,并使后轮联络阀vrr开阀,通过流体单元hu的调压单元yc对左右的后轮轮缸cwr的液压(后轮制动液压)pwr进行加压。基于调压单元yc的制动被称为“伺服制动”。
59.在外部泄漏控制中,通过主缸cm对左右前轮whf的制动液压pwf进行加压,通过流体单元hu的调压单元yc对左右后轮whr的制动液压pwr进行加压(通过伺服制动进行加压)是基于以下的理由。此外,在制动控制装置sc中,采用前后型的制动系统(即,前轮、后轮制动系统bkf、bkr),对左右的轮缸cw(=cwf、cwr)赋予相同的液压,所以不产生制动力的左右差。因此,不产生起因于制动力的左右差的车辆偏转。
60.·
在制动液bf从制动控制装置sc泄漏到外部的外部泄漏时,难以确定在前轮、后轮制动系统bkf、bkr的哪一个产生外部泄漏等制动液bf泄漏的部位。
61.·
在制动时,前轮载荷增加,后轮载荷减少,所以设定各种规格,以使得在车辆减速(即,作用于车辆的总制动力)时,前轮制动力的贡献度比后轮制动力的贡献度大。具体而言,前轮轮缸cwf的受压面积相对于主缸cm的受压面积之比、亦即前轮面积比被设定为大于后轮轮缸cwr的受压面积相对于主缸cm的受压面积之比亦即、后轮面积比。另外,前轮旋转部件ktf的有效制动半径被设定为大于后轮旋转部件ktr的有效制动半径。
62.·
在后轮制动系统bkr产生外部泄漏的情况下,后轮制动力减小,但通过上述的规格设定,并利用手动制动对前轮whf的轮缸cwf进行加压,从而确保足够的前轮制动力。另外,即使在后轮制动系统bkr产生外部泄漏,由于前轮联络阀vrf关闭,所以也抑制前轮制动系统bkf的制动液bf的外部泄漏。
63.·
在前轮制动系统bkf产生外部泄漏的情况下,前轮制动力减小。并且,通过上述的规格设定,在车辆减速时,后轮制动力的贡献度比前轮制动力的贡献度小,所以若利用手动制动对后轮whr的轮缸cwr进行加压,则不能够得到足够的后轮制动力。因此,在外部泄漏控制中,通过利用伺服制动对后轮whr的轮缸cwr进行加压,从而确保足够的后轮制动力。另外,即使在前轮制动系统bkf产生外部泄漏,由于前轮联络阀vrf关闭,所以也抑制后轮制动系统bkr的制动液bf的外部泄漏。
64.在步骤s170中,决定外部泄漏控制所涉及的防抱死制动控制的许可和不许可(允许/禁止)。具体而言,禁止针对前轮whf的防抱死制动控制(abs控制)的工作,并允许针对后轮whr的防抱死制动控制的工作。在外部泄漏控制中,通过主缸cm以手动制动使前轮制动液压pwf增加,并通过伺服制动利用调压单元yc使后轮制动液压pwr增加。该情况下,由于由调压单元yc对后轮制动液压pwr进行伺服控制,所以在作用于车辆整体的总制动力中,与不执行外部泄漏控制的情况(步骤s140的处理的执行)相比较,前轮制动力的贡献度相对降低,后轮制动力的贡献度相对提高。
65.在执行外部泄漏控制时,利用手动制动对前轮轮缸cwf进行加压,使前轮联络阀vrf闭阀,所以若对前轮whf执行防抱死制动控制,则有可能不能够使从前轮轮缸cwf向低压储存器rw排出的制动液bf返回到前轮制动系统bkf,产生前轮制动系统bkf的制动液不足,无法充分获得前轮制动力。因此,在执行外部泄漏控制时,在前轮whf中,禁止执行防抱死制动控制。另一方面,存在若后轮whr产生过大的减速滑移则损害车辆的稳定性的情况,所以针对后轮whr,允许执行防抱死制动控制。即使对后轮whr执行防抱死制动控制,由于后轮联络阀vrr会通过伺服制动而打开,所以也能够使从后轮轮缸cwr向低压储存器rw排出的制动液bf返回到后轮制动系统bkr,不会产生后轮制动系统bkr的制动液不足,不会无法充分获得后轮制动力。由此,在执行外部泄漏控制的情况下,也能够获得足够的车辆减速度,并且确保车辆的方向稳定性。
66.<车辆的制动控制装置的第二实施方式>
67.参照图3的示意图,对本发明所涉及的制动控制装置sc的第二实施方式进行说明。在第二实施方式中,也采用串联型主缸cm,并采用前后型的流体路,作为两个系统的流体路。
68.在第一实施方式的调压单元yc中,在包含流体泵hp的回流路hk中,通过调压阀ua调节调整液压pp。在第二实施方式的调压单元yc中,通过电动马达mt的旋转动力,直接对调整液压pp进行液压伺服控制。除了调压单元yc以外,与第一实施方式所涉及的制动控制装置sc相同,所以对不同点进行说明。
69.-调压单元yc(第二实施方式)-
70.流体单元hu所包含的调压单元yc由电动马达mt、减速机gs、旋转/直动转换机构(例如,丝杠机构)nj、调压活塞pc以及调压缸cc构成。
71.电动马达mt的旋转动力通过减速机gs进行减速,并传递到丝杠机构(相当于“转换”机构)nj。例如,小径齿轮固定于电动马达mt的输出轴。小径齿轮与大径齿轮啮合,其旋转轴固定于丝杠机构(转换机构)nj的螺栓部件oj。丝杠机构(旋转/直动转换机构)nj由螺栓部件oj以及螺母部件mj构成。通过丝杠机构nj将减速机gs的旋转动力转换为调压活塞pc的直线动力。通过丝杠机构nj的螺母部件mj推压调压活塞pc,转换为调压活塞pc的直线动力。采用梯形丝杠等“滑动丝杠”,作为丝杠机构nj。另外,能够采用滚珠丝杠等“滚珠丝杠”,作为丝杠机构nj。
72.调压活塞pc被插入到调压缸cc的内孔,形成“活塞/缸”的组合。具体而言,通过“调压缸cc的内周面、底面”以及“调压活塞pc的端面”形成液压室rc(称为“调压室”)。调压室rc经由前轮、后轮联络路hrf、hrr与前轮、后轮连接路hsf、hsr连接。通过使调压活塞pc移动,从而调压室rc的体积变化。此时,使前轮、后轮联络阀vrf、vrr开阀,并使前轮、后轮分离阀
vmf、vmr闭阀,所以制动液bf不返回到前轮、后轮液压室rmf、rmr,而相对于前轮、后轮轮缸cwf、cwr移动。
73.若电动马达mt被向正转方向旋转驱动,则调压室rc的体积减少,调整液压pp(即,制动液压pw)增加。另一方面,若电动马达mt被向反转方向旋转驱动,则调压室rc的体积增加,制动液bf从前轮、后轮轮缸cwf、cwr返回到调压缸cc。由此,调整液压pp(=pw)减少。此外,在调压室rc内设置复位弹簧(弹性体),在停止对电动马达mt的通电的情况下,调压活塞pc返回到其初始位置。在调压活塞pc返回到初始位置的情况下,调压室rc和调压蓄部rvc经由储存器路hv成为连通状态。在调压室rc内,在制动液bf不足的情况下,从调压蓄部rvc供给制动液bf。此外,与第一实施方式同样地在主储存器rv设置液面传感器sh,以检测液面高度sh。
74.若执行外部泄漏控制,则使前轮分离阀vmf开阀,使主缸cm和前轮轮缸cwf成为连通状态。另外,使前轮联络阀vrf闭阀,使调压缸cc(调压室rc)和前轮轮缸cwf成为非连通状态。另一方面,使后轮分离阀vmr保持为闭阀状态,使后轮联络阀vrr保持为开阀状态,向后轮轮缸cwr供给被调节为调整液压pp的制动液bf。即,通过手动制动使左右的前轮制动液压pwf增加,通过伺服制动使左右的后轮制动液压pwr增加。在第二实施方式所涉及的制动控制装置sc中,也起到上述相同的效果。
75.如第二实施方式所涉及的调压单元yc那样,通过利用电动马达mt的旋转动力使调压缸cc内的调压活塞pc移动来调节调整液压pp被称为“电动缸”。在电动缸中,能够代替液面高度sh(或者,除了液面高度sh之外),基于调压活塞pc的位移与调整液压pp的关系来决定剩余量mb。具体而言,在产生外部泄漏的情况下,制动控制装置sc内的制动液bf的量减少,所以与未产生外部泄漏的情况相比较,相对于调压活塞pc的自初始位置起的位移,调整液压pp变小。换句话说,在调压活塞pc返回到初始位置之前(例如,调压室rc与调压蓄部rvc成为连通状态之前)产生“pp=0”。这里,通过未图示的位移传感器检测调压活塞pc的位移。另外,由于减速机gs、旋转/直动转换机构nj等的规格是已知的,所以也可以基于设置于电动马达mt的旋转角传感器ka的检测结果、亦即旋转角ka进行运算。
76.<其它实施方式>
77.在第一、第二实施方式所涉及的制动控制装置sc中,采用了串联型的主缸cm。本发明也能够应用于采用单一型的主缸cm的制动控制装置sc(例如,参照de102017221349a的图1)。换句话说,本发明能够利用于采用前后型的系统作为制动系统的线控制动型的制动控制装置sc。在其它实施方式中,也起到上述相同的效果。
78.<实施方式和作用/效果的总结>
79.在制动控制装置sc中具备:“能够与车辆的制动操作部件bp的动作联动地压送制动液bf的主缸cm”、“被电驱动的流体单元hu”、“设置于车辆的前轮、后轮whf、whr,并由主缸cm以及流体单元hu中的任意一方加压的前轮、后轮轮缸cwf、cwr”、以及“控制流体单元hu的控制器ecu”。而且,在控制器ecu中,判定在制动控制装置中是否产生制动液bf的外部泄漏,并在产生外部泄漏的情况下,通过主缸cm对两个前轮轮缸cwf进行加压(即,进行手动制动)。另一方面,通过流体单元hu(特别是,调压单元yc)对两个后轮轮缸cwr进行加压(即,进行伺服制动)。例如,基于“剩余量mb为规定量(执行规定量)mx以下”来判定“产生外部泄漏”。该控制被称为“外部泄漏控制”。
80.在制动控制装置sc中,采用前后型的制动系统,所以即使进行在“mb≤mx”的条件下执行的外部泄漏控制,也不产生制动力的左右差,不容易产生起因该左右差的车辆偏转。外部泄漏难以确定其产生部位。设定各种规格(轮缸cw的受压面积相对于主缸cm的受压面积、旋转部件kt的有效制动半径、摩擦材料的摩擦系数等),以使得在车辆的减速度(即,车辆的总制动力)中,前轮制动力的贡献度比后轮制动力的贡献度大。因此,通过进行外部泄漏控制,在后轮制动系统bkr产生外部泄漏的情况下,通过利用手动制动对前轮whf的轮缸cwf进行加压,从而确保足够的前轮制动力。另外,即使在后轮制动系统bkr产生外部泄漏,由于前轮联络阀vrf关闭,所以抑制前轮制动系统bkf的制动液bf的外部泄漏。另一方面,在前轮制动系统bkf产生外部泄漏的情况下,通过利用伺服制动对后轮whr的轮缸cwr进行加压,从而确保足够的后轮制动力。另外,即使在前轮制动系统bkf产生外部泄漏,由于前轮联络阀vrf关闭,所以抑制后轮制动系统bkr的制动液bf的外部泄漏。
81.在制动控制装置sc的流体单元hu中包含用于执行抑制前轮whf、后轮whr的过大的减速滑移的防抱死制动控制的入口阀vi、出口阀vo(总称并称为“液压调节器”)。在外部泄漏控制所涉及的防抱死制动控制中,在产生外部泄漏的情况下,禁止针对前轮whf的防抱死制动控制的工作,并允许针对后轮whr的防抱死制动控制的工作。换句话说,执行在步骤s160的外部泄漏控制时,禁止针对前轮whf的防抱死制动控制的工作,并允许针对后轮whr的防抱死制动控制的工作。
82.在执行外部泄漏控制时,利用手动制动对前轮轮缸cwf进行加压,并使前轮联络阀vrf闭阀,所以若对前轮whf执行防抱死制动控制,则有可能不能够使从前轮轮缸cwf向低压储存器rw排出的制动液bf返回到前轮制动系统bkf,产生前轮制动系统bkf的制动液不足,无法充分地获得前轮制动力。因此,在执行外部泄漏控制时,在前轮whf中,禁止执行防抱死制动控制。另一方面,存在若在后轮whr产生过大的减速滑移则损害车辆的稳定性的情况,所以针对后轮whr,允许执行防抱死制动控制。即使对后轮whr执行防抱死制动控制,由于后轮联络阀vrr会通过伺服制动而打开,所以能够使从后轮轮缸cwr向低压储存器rw排出的制动液bf返回到后轮制动系统bkr,不会产生后轮制动系统bkr的制动液不足,不会无法充分地获得后轮制动力。由此,在执行外部泄漏控制的情况下,也获得足够的车辆减速度,并且确保车辆的方向稳定性。
83.在制动控制装置sc中,向主缸cm供给制动液bf的主储存器rv的内部通过分隔板sk被划分为多个蓄液部(rvf、rvr、rvc等)。而且,采用制动液bf的液面高度sh作为剩余量mb,用于外部泄漏控制的执行的阈值亦即规定量mx被设定为比分隔板sk的高度sk大(高)。因此,能够在蓄液部rvf、rvr、rvc成为单独的蓄液器之前,提早开始执行外部泄漏控制。另外,在将液面高度sh用作剩余量mb的情况下,不需要准备多个液面传感器sh,能够通过一个液面传感器sh获取剩余量mb(液面高度sh)。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
