用于气体再流通系统中的烟雾去除的系统和方法
1.相关申请的交叉引用
2.本技术要求于2019年5月23日提交的美国临时专利申请序列号62/851950的优先权,其全部内容通过引用结合于此。
技术领域
3.本公开涉及用于微创外科手术的气体再流通系统。
背景技术:
4.由于更短的恢复时间、更短的手术持续时间和更低的成本,微创外科手术(包括内窥镜外科手术,比如腹腔镜、关节镜、内窥镜、胸腔镜外科手术)在外科环境中变得越来越普遍。微创外科手术通常是通过在患者体内人工制造的小开口或入口插入器械来进行的。
5.在腹腔镜外科手术中,气体通过由导气针在腹部形成的人工开口注入腹膜腔。通常,注射的气体类型是co2气体,尽管两种或更多种气体的混合物或不同的气体也可能是合适的,这取决于外科手术。在腹腔镜手术中,co2气体用于扩张气腹,从而为外科医生可视化器官和操纵外科器械和内窥镜创造空气空间。co2气体通过吹气装置在压力下注入腹膜腔。美国专利号6299592和美国专利序列号62/037893中描述了适用于本技术的吹气装置的示例,它们在此全部引入作为参考。
6.首先扩张气腹后,将带有摄像头(连接到监视器)的内窥镜插入腹腔,以观察腹腔内部,尤其是手术空间。内窥镜通常在手术过程中保持插入。也可以形成其他开口,以提供进入腹腔的其他外科器械。
7.在诸如腹腔镜手术的微创外科手术过程中,用于切割、烧灼、消融或蒸发腹部内的组织的器械会产生外科烟雾,这可能对患者造成健康风险,并且如果一些或全部外科烟雾逸出到手术室,还可能对外科医生和手术室中的其他人造成健康风险。如本文所用,术语“手术烟雾”包括但不限于可能含有毒素、颗粒物质、刺激物、活细胞和病毒、水蒸气和其他污染物的气体或气溶胶。手术烟雾也会影响外科医生通过内窥镜中的摄像头进行观察。由于co2气体在低于体温的情况下进入腹腔,摄像机镜头上的雾化或冷凝也会进一步加剧这种对视觉的损害。损害可视化可能会干扰手术过程,并对患者的健康造成风险。此外,损害可视化还可能导致手术的延迟,特别是在涉及远程执行的机器人辅助外科手术的手术中。
技术实现要素:
8.在一方面,用于内窥镜外科手术的气体再流通系统包括与气体输入连接流体连通的第一管,其中第一管可连接到可插入腹膜腔的手术设备。第二管与气体输出连接流体连通,其中第二管也可连接到可插入腹膜腔的手术设备。该系统还包括泵,该泵具有马达,以将气体通过第一管从腹膜腔抽吸到气体输入连接中,并将气体排出气体输出连接并通过第二管排放到腹膜腔中。烟雾检测传感器位于沿着由第一管、泵和第二管限定的气体流动路径的位置,并且配置成测量气体中存在的烟雾量。该系统还包括控制器,该控制器配置为从
烟雾检测传感器接收表示检测到的烟雾量的输出信号。控制器还配置成响应于检测到的烟雾量来调节泵的马达的速度。可以提高马达速度,以便更快地从腹膜中清除烟雾,并通过气体再流通系统中的一个或多个过滤机构更快地过滤气体。
9.在其他方面,气体再流通系统还可以包括气体排出路径,当烟雾量上升到可由再流通系统中的过滤器管理的阈值以上时,该气体排出路径绕过再流通系统以更快地去除烟雾。烟雾检测传感器可以位于第一管、第二管或泵中或沿着第一管、第二管或泵。在泵包括可拆卸泵筒的应用中,传感器可以放置在可拆卸泵筒上或内部。诸如电化学、光学和光电传感器的不同传感器技术可以在烟雾检测传感器中实现。烟雾检测传感器可以通过有线连接或无线方式与气体再流通系统的控制器或泵通信。
10.通过研究以下附图和详细描述,其他系统、方法、特征和优点对于本领域技术人员来说将是或将变得显而易见。所有这些附加的系统、方法、特征和优点都应包含在本说明书中,在本发明的范围内并受所附权利要求的保护。
附图说明
11.图1是气体再流通系统的实施例的说明性示例。
12.图2是气体再流通系统的实施例的示意性示例。
13.图3是气体流通泵筒的实施例的示例截面图。
14.图4是气体流通泵筒的实施例的另一示例截面图。
15.图5a-5d是气体流通泵筒的实施例的示例。
16.图6a-6d是气体流通泵筒的实施例的另一示例。
17.图7a-7h是气体流通泵筒的一部分的实施例的示例。
18.图8a-8e是气体流通泵的实施例的示例。
19.图9是气体再流通系统的框图。
20.图10a和10b是气体流通泵筒和马达之间的联接方法的实施例的示例。
21.图11a-11f是在气体再流通系统中使用的连接元件的实施例的示例。
22.图12是在气体再流通系统中使用的连接元件的实施例的截面图。
23.图13是在气体再流通系统中使用的连接元件的另一实施例的截面图。
24.图14是在气体再流通系统中使用的旁通阀的实施例的示例。
25.图15a和15b是在气体再流通系统中使用的湿气阱的实施例的示例。
26.图16a和16b是在气体再流通系统中使用的湿气阱的另一实施例的示例。
27.图17a-17c是用于气体再流通系统的外壳的实施例的示例。
28.图18a和18b是用于气体再流通系统的外壳的另一实施例的示例。
29.图19a和19b是用于气体再流通系统的外壳的另一实施例的示例。
30.图20a-20f是用于气体再流通系统的外壳的另一实施例的示例。
31.图21a-21h是气体流通泵筒的实施例的另一示例。
32.图22a和22b是气体流通泵筒和马达之间的联接方法的另一实施例的示例。
33.图23a-23f是气体流通泵筒和马达之间的联接方法的另一实施例的示例。
34.图24a和24b是在气体再流通系统中使用的三通阀的实施例的示例。
35.图25a和25b是在气体再流通系统中使用的三通阀的另一实施例的示例。
36.图26是具有烟雾检测和通风能力的气体再流通系统的实施例的示意性示例。
37.图27示出了在图26的系统中使用的烟雾检测传感器。
38.图28示出了图27的烟雾检测传感器的替代实施例。
39.图29是图26的气体再流通系统的替代实施例的示意图。
40.图30是可用于图29的气体再流通系统中的具有光电烟雾传感器的气体泵筒的实施例。
41.图31示出了可用于图30的气体泵筒的烟雾传感器中的光电检测器阵列。
42.图32示出了用于气体再流通系统的电化学烟雾检测器。
43.图33是可用于图29的气体再流通系统中的具有电化学烟雾传感器的气体泵筒的实施例。
44.图34示出了可以与图33的可拆卸泵筒连接的马达外壳。
45.图35是图22a的马达组件的替代实施例,可与图34的马达外壳一起使用,并被修改为具有电连接器以接收图33的气体泵筒。
46.图36是图33的气体泵筒的替代实施例。
47.图37示出了位于气体再流通泵管组的输入公鲁尔阀中的烟雾传感器。
48.图38示出了位于气体再流通泵管组的输出公鲁尔阀中的烟雾传感器。
49.图39示出了基于烟雾检测标准调节泵的速度以改变图26或29的系统中烟雾去除速率的方法。
50.图40示出了用于在图26的系统中的气体再流通路径和抽吸排气路径之间切换的阀。
51.图41示出了基于在气体中检测到的烟雾量来调节图26的系统中的气体再流通速度或者可替代地从气体再流通系统中排出气体的方法。
具体实施方式
52.本公开涉及一种用于在外科手术过程中再流通注射到腹膜腔中的气体的系统。该系统包括容积式泵,用于去除气体并将气体注入腹膜腔,以去除手术过程中在腹膜腔内产生的烟雾。
53.为了解决在外科手术过程中从腹膜过滤或去除烟雾的挑战,本文描述了用于检测烟雾量并基于检测到的烟雾量自动调节过滤和再流通气体过程的系统和方法。所描述的系统和方法可以对处理腹膜内产生的烟雾的去除提供快速响应,这不需要手动调节或干预,并且与手术类型无关。
54.在不同的实施方式中,根据本发明的气体再流通系统将感测气腹内的烟雾密度和数量,并将该信息与腔内的可见性关联。任何类型的烟雾检测传感器例如使用光传感技术的传感器都可以用来确定烟雾的浓度。此外,传感器可以放置在气腹内,或者在用于co2(或其他气体类型)排出或流通的管的管线中。然后,系统可以使用确定的烟雾密度来增加或减少腹膜腔内的co2运动,以快速去除烟雾。
55.本公开提供了一种安全成本有效的气体再流通系统,其具有无需消毒即可重复使用的部件。该成本有效的系统利用控制器而不是传感器来监控泵运行并检测故障。该系统能够实现高的去除和注射流速,例如每分钟4至10升,这确保了任何手术烟雾从外科医生的
视野中快速有效地去除,同时最小化腹膜腔中的任何压力变化。
56.参考图1,示出了气体再流通系统100的实施例。气体再流通系统100可以包括流通泵105、主输入套管针110、副输出套管针115、输入管120和输出管125。输出管125可以包括过滤器和/或湿气阱130。输入管120和输出管125可以类似于由northgate技术公司制造的吹气管组。
57.气体再流通系统100可以与吹入系统结合使用,例如在美国专利号6299592和美国专利序列号62/037893中描述,它们在此全部通过引用结合于此。吹入系统可以包括吹入器127、吹入套管针128、将吹入器127连接到吹入套管针128的吹入管129以及气体再流通系统100和吹入器127之间的电子通信线路129。气体再流通系统100可以包括通过通信线路129与吹入器127通信的控制器。诸如启动、停止、流量增加、流量减少或气体再流通控制器的其他功能的信息或命令可以驻留在吹入器127中,并传送给气体再流通控制器。另外或可替代地,气体再流通控制器可以集成到吹入器127中并与其共用。气体再流通系统100和吹气器127可以共用电源、处理器、图形用户界面、加热功能、加湿功能,仅举几个示例。
58.流通泵105通过副输出套管针115、输出管125和过滤器/湿气阱130从患者体内去除气体。阀135可以将副输出套管针115连接到输出管125。当输出管125通过阀135连接到副输出套管针115时,阀135的阀杆可以偏转到打开位置。当阀135从副输出套管针115断开时,阀135的阀杆可以返回到其自然关闭位置。当输出管125连接到副输出套管针115时,阀135可以允许气体流过阀。当输出管125与副输出套管针115断开时,阀135可以防止气体进入输出管125。当输出管125与副输出套管针115断开时,阀135可以自动关闭。阀135可以是鲁尔阀,例如或halkey/品牌的封闭公鲁尔阀。
59.流通泵105还通过主输入套管针110和输入管120将气体注入患者体内。类似于阀135的阀可以连接主输入套管针1 10和输入管120,并且可以在输入管120与主输入套管针110断开时关闭。
60.再流通泵105使气体从腹膜腔再流通,通过过滤器/湿气阱130,并返回腹膜腔。通过输出管125从患者体内去除的气体流速与通过输入管120注射回患者体内的气体流速相同或基本相似。过滤器/湿气阱130可以从气体中去除液体,并且可以从气体中去除颗粒,例如手术烟雾颗粒。过滤器/湿气阱130可以包括容易吸收液体的介质,优选最多15至20毫升液体,并且容易将水分释放到流过或穿过介质的气体中。适合使用的介质包括品牌的材料。介质的尺寸优选为1-2.5英寸长且直径为0.5-2.0英寸,最优选为1.5-2.0英寸长且直径为1-1.5英寸。在一实施例中,介质可以具有锯齿状外表面和中心开口。当放置在过滤器壳体中时,锯齿状外表面限定气体可以在其中流动的多个通道开口,并且中心开口可以填充有包含木炭的棒。当气体通过中心开口时,木炭可以将颗粒物质截留在气体中,同时可以有效地从气体中去除不期望的气味。另外或可替代地,气味去除可以使用其他材料来完成,例如酶材料、醋和水-si-筒,或者气味可以使用香料来掩盖。过滤器/湿气阱130可以允许再流通的气体将水分保持在50-70%相对湿度的范围内。优选地,气体再流通系统100将允许气体再流通进出患者,并且将被动地保持气体的湿度水平,在60-75华氏度之间的正常手术室温下,气体的相对湿度最小为70%。利用气体再流通系统100可以减少或消除吹入器127将额外的co2气体注入腹膜腔的需要,并且还可以在腹膜腔中保持合理的湿度水平,这与添加的co2相反,除非它首先通过气体加温器加湿器(额外的成本),否则它将非常干
燥,通常在0%的相对湿度下。气体再流通不仅将减少0%相对湿度气体的输入,而且还可以防止由吹入器127试图保持腹膜腔中的压力引起的呼吸效应,并防止大量co2气体排放到手术室中。例如,在正常的45分钟胆囊手术过程中,允许每分钟6升泄漏率的被动烟雾去除系统可能会向手术室排放高达270升的co2气体。因此,气体再流通系统100是保持腹膜腔中足够的气体湿度的成本有效的方法。
61.参考图2,示出了气体再流通系统200的实施例。气体再流通系统200可以包括与气体再流通系统100相同的一些部件和操作特性。气体再流通系统200可以包括流通泵205、输入套管针210、输出套管针215、输入管220和输出管225。输出管225可以包括过滤器和/或流体阱230。输入管220可以包括过滤器232。阀235可以将输出套管针215连接到输出管225。阀236可以将输入套管针210连接到输入管220。阀235、236可以与阀135相同的特征操作,例如在断开时自动关闭,并且以与阀135相同的方式操作。
62.流通泵205可以是隔膜泵或任何其他合适的容积式泵,包括筒(cartridge)206和马达207。筒206可以与马达207断开。马达207可以是任何类型的马达。马达207优选地可以是但不限于直流(“dc”)马达。筒206可以被密封,以防止气体从筒206中逸出,除非通过与输入管220和输出管225的连接。筒206可以由多个相互附接的部件构成,例如通过超声波焊接、使用粘合剂、激光焊接、带有或不带有垫圈的机械卡扣连接或任何其他将配合表面结合和密封在一起的已知方法。筒206可以被密封,使得它仅与入口管220和出口管225的开口流体连通。因此,筒206内的气体可以不会与马达207或再流通泵205的其他部分接触。气体再流通系统可以是从患者腹膜腔去除手术烟雾的廉价方法,因为马达207不会因为与来自腹膜腔的气体接触而被污染,因此可以重复使用而不需要消毒。再流通泵205的可能由于与来自腹膜腔的气体接触而被污染的部分,例如筒206,可以是一次性的。
63.当操作时,气体再流通系统200可以从腹膜腔中去除气体,包括手术烟雾,优选以每分钟4-10升的流速,最优选以每分钟6-8升的流速,并且在过滤后,优选以每分钟4-10升的流速,最优选以每分钟6-8升的流速将其注射回腹膜腔中。来自腹膜腔的气体首先通过输出套管针215,通过阀235,并进入输出管225。如果使用炭棒(如上所述)或单独的或集成的活性炭过滤器,气体可以穿过流体阱230,其可以去除由于气体温度变化(即从体温到室温)而形成的冷凝物/液体以及气味。气体然后穿过再流通泵205的筒206。气体可以穿过位于再流通泵205之前或之后的过滤器,例如过滤器230或232。过滤器可以从气体中去除颗粒物质和其他污染物。过滤器优选由在20升/分钟流速下提供不超过12.3mmhg压降的材料制成。气体可以通过输入管220、阀236和输入套管针210注射回腹膜腔。
64.再流通系统200可以包括控制器240以控制马达207的运行。控制器240可以与连接到再流通系统200的吹入器组合或结合使用。控制器240可以是(德州仪器)品牌的控制器。控制器240可用于检测马达207的运行和故障状况和/或气体再流通系统200中的安全问题。控制器240可以检测由马达207汲取的功率量,例如通过测量马达207的电压。控制器240可以基于马达207汲取的功率量来检测或确定气体再流通系统200中已经发生了故障或安全问题。例如,控制器240可以确定如果马达207汲取比预期更多的功率,如通过电压或电流的增加大于预定量所判断的,则故障状况或安全问题发生。如果出现故障状况或安全问题,控制器240可以触发马达207的关闭。使用控制器240来检测气体再流通系统200中的故障状况或安全问题可能比使用传感器更具成本效益。
65.如果阀235和236分别与输出套管针215和输入套管针210断开连接,则阀235和236可以配置成关闭。当阀235与输出套管针215断开时,关闭其可以限制环境空气进入气体再流通系统200的吸入侧。气体再流通系统200中夹带的任何环境空气将通过再流通泵205注入腹膜腔。当阀236与输入套管针210断开时,关闭阀236可以防止气体从腹膜腔排放到周围环境中。
66.关闭阀235或236可以在气体再流通系统200的气体回路中产生压差。压差可增加马达207上的负载,如由马达207汲取的电压或电流的增加所判断的。如果电压或电流的增加高于预定阈值,控制器240可以检测气体再流通系统200中的故障状况或安全问题。控制器240可以在检测到气体再流通系统200中的故障状况或安全问题时触发马达207的关闭。例如,如果阀235和输出管225与输出套管针215断开,阀235将关闭。关闭阀235将导致再流通泵205在封闭管上形成吸力,这将迫使再流通泵205更加努力地工作,并且马达207汲取更多的功率以保持其适当的速度。如果电压或电流增加超过预定值,则由马达207汲取的功率增加可能导致故障状况。一旦检测到由从输出套管针215断开阀235引起的故障状况,控制器240可触发再流通泵205关闭。类似地,如果阀236和输入管220与输入套管针210断开,阀236将关闭。关闭阀236将导致再流通泵205抵靠关闭的管或“死头”泵送,这将迫使再流通泵205更努力地工作,并且马达207汲取更多的功率以保持其适当的速度。如果电压或电流增加超过预定值,则由马达207汲取的功率增加可能导致故障状况。一旦检测到由从输入套管针210断开阀236引起的故障状况,控制器240可触发再流通泵205关闭。因此,气体再流通系统200可以通过使用控制器240监控马达207来监控输出管道225和输入管道220的状态。
67.以类似的方式,气体再流通系统200可以监控输入套管针210和输出套管针215与腹膜腔的连接状态。从腹膜腔移除输入套管针210或输出套管针215将通过改变流通泵的抽吸源或排放源的压力来影响流通泵205和马达207的操作。控制器240可以检测马达207的操作变化,并确定输入套管针210或输出套管针215已经从腹膜腔去除。例如,从腹膜腔去除输入套管针210将降低马达207保持相同速度所需的功率,因为流通泵205将不再被泵送以克服腹膜内压力。控制器240可以检测由马达207汲取的减少的功率,并且确定输入套管针210已经从腹膜腔断开。控制器240然后可以触发流通泵205关闭,以防止气体从腹膜腔进入周围环境。
68.气体再流通系统200可以包括用户界面245,例如计算机,以允许操作者确定或确认气体再流通系统200的状态。例如,如果控制器240因为阀235与输出套管针215断开而关闭再流通泵205,用户界面245可以显示再流通泵205关闭,并且可能的原因是输出管225与输出套管针215断开。操作者可以确认输出管225与输出套管针215断开连接并将其重新连接,以便重新启动在流通泵205。类似地,操作者可以确定是否发生了其他故障情况,例如堵塞、气体路径中的过度限制或气体路径中的泄漏,例如管道断开或损坏。
69.参考图3和图4,示出了在再流通泵中使用的筒306的实施例。筒306可用于再流通泵,例如关于图2描述的再流通泵205。图3和图4示出了筒306的局部剖视图。包括示出气体流动路径的箭头是为了更好地描述筒306的操作。筒306包括到输出管的连接部350,例如图2中的输出管225,其可以连接到腹膜腔。筒306包括到输入管的连接部352,例如图2中的输入管220,其可以连接到腹膜腔。
70.如图3中的箭头所示,来自腹膜腔的气体通过连接部350进入筒306。筒306可以包
括阀354和360。气体通过阀354进入筒306,进入隔膜室356,如图3中的箭头所示。气体从隔膜室356通过阀360流出筒306,如图4中的箭头所示(下面讨论)。阀354和360可以是伞形阀。穿过阀354和360的气体开口362的直径可以在0.05英寸和0.15英寸之间,并且可以优选为0.085英寸的直径。气体开口362可以包括一个以上的同心开口,使得气体开口362的组合面积的大小设置成可以允许不同的流速。例如,开口的尺寸可以设定为流速在4升/分钟至10升/分钟的范围内,第一优选范围为7至8升/分钟。尽管每分钟4-10升的流速是可接受的流量范围,但通过增大或减小筒的尺寸、增大或减小马达冲程长度以改变隔膜腔内产生的体积,或者通过提高马达的速度,可以实现更高或更低的流速。例如,在另一实施例中,10-12升/分钟的第二优选流速范围可以通过调节气体开口尺寸、筒尺寸、马达冲程长度或马达速度中的一个或多个来实现。当实施下文描述的烟雾感测和过滤/排出技术时,10-12升/分钟的较高流速范围可能是优选的。
71.筒306可以包括隔膜室356中的隔膜358。隔膜358远离阀354和360的运动打开阀354,并通过阀354将气体吸入隔膜室356,如图3中的箭头所示。当隔膜358移动远离阀354和360时,阀354可被拉开,阀354和360可以通过输出管从腹膜腔抽取气体并进入隔膜室356,如图3中的箭头所示。当隔膜358移动远离阀354和360时,阀360可被拉关闭,这可以防止气体通过阀360离开或进入隔膜室356。
72.隔膜358朝向阀354和360的运动打开阀360,并推动气体从隔膜室356通过阀360,并通过连接352流出筒306,如图4中的箭头所示。隔膜358朝向阀354和360的运动关闭阀354,这可以防止气体通过连接350被推出隔膜室356。隔膜358朝向和远离阀354和360的往复运动通过输出管中的任何过滤器或液体阱从腹膜腔中抽取气体,并通过输入管将气体推回腹膜腔。
73.图5a-5d、6a-6d和7a-7h示出了用于气体再流通泵例如关于图2描述的再流通泵205的筒的其他示例实施例。图5a-5d、6a-6d和7a-7h中所示的筒的部件和操作特性可类似于上述筒306。
74.图5a示出了筒506的分解图。筒506包括连接550、552、阀554、560、隔膜558和柱塞564。阀554、560可以是伞形阀。连接550可以是进入筒506的气体入口。连接552可以是筒506的气体出口。柱塞564可以朝向阀554、560移动隔膜558,以便通过腹膜腔再流通气体,如上面参照图3和4所述。
75.图5b示出了筒506的非分解透视图。图5c示出了筒506的前视图。图5d示出了筒506的侧视图。
76.图6a示出了筒606的分解图。筒606包括连接650、652、阀654、660、隔膜658和柱塞664。阀654、660可以是伞形阀。连接650可以是进入筒606的气体入口。连接652可以是筒606的气体出口。柱塞664可以朝向阀654、660移动隔膜658,以便通过腹膜腔再流通气体,如上面参照图3和4所述。
77.图6b示出了筒606的非分解透视图。图6c示出了具有示例性尺寸的筒606的前视图。图6d示出了具有示例性尺寸的筒606的侧视图。筒606的部件的尺寸和方向可以根据操作要求而变化。
78.图7a-7h示出了筒706的气体入口/出口部分的多个视图。图7a示出了筒706的气体入口/出口部分的透视图。图7b是筒706的气体入口/出口部分的前视图。图7c是具有示例性
尺寸的筒706的气体入口/出口部分的仰视图。图7d是筒706的气体入口/出口部分的侧视图。图7e是具有示例性尺寸的筒706的气体入口/出口部分的后视图。图7f是具有示例性尺寸的筒706的气体入口/出口部分的侧剖视图。图7g是具有示例性尺寸的筒706的气体入口/出口部分的另一侧剖视图。图7h是筒706的气体入口/出口部分的底部剖视图。筒706的部件的尺寸和方向可以根据操作要求而变化。
79.参考图8a-8e,示出了流通泵805的实施例。流通泵805可以包括筒806、马达807、曲柄组件866、锁定臂868和筒保持器870。再流通泵805的部件和操作特性可以类似于如上所述的再流通泵305。马达807可以通过机械联接而连接到曲柄组件866。马达807可以向曲柄组件866提供旋转运动。曲柄组件866可以将旋转运动转换成往复运动。曲柄组件866的往复运动可以移动筒806内的隔膜,如以上参考图3所述。图8a示出了从再流通泵805拆下的筒806。筒806可以从再流通泵805上拆下,以便对筒806进行消毒或处理。因为筒806可能是再流通泵805中唯一与来自患者腹膜腔的气体接触的部件,所以再流通泵805的其余部件可以在不同的患者身上重复使用,而不会危及患者的安全。筒806可以在与患者一起使用后被消毒或处理,并且新的筒806可被插入再流通泵805中用于下一个患者。
80.图8b示出了插入到流通泵805的筒保持器870中的筒806。筒806可以用锁定臂868固定在再流通泵805内。锁定臂868可以包括突起872,其设计成装配在位于筒806中的凹部874内。在图8d中可以最好地看到突起872。在图8c中可以最好地看到凹部874。如图8f所示,当突起872放置在凹部874中时,筒806可以固定在筒保持器870内。通过压下锁定臂868的端部,然后将筒806从筒保持器870提起,可以将筒806从筒你出去870释放。从再流通泵805固定和释放筒806的方法可以根据操作要求而变化。
81.参考图9,示出了气体再流通系统900的实施例。气体再流通系统900可以包括与图1-8中描述的气体再流通系统相似的部件和操作特性。气体再流通系统900可以包括流通泵905、泵筒906、马达907、输入套管针910、输出套管针915、阀935和936、流体阱930、过滤器932、控制器940、用户界面945和电源976。控制器940可以包括dc马达控制电路978和处理器电路980。用户界面945可以包括带有软件的计算机,例如lab以控制气体再流通系统900的一些或所有部件。
82.气体再流通系统900可以监控施加在马达907上的负载,以便检测气体再流通系统900的故障或安全问题。可以通过测量位于马达907的功率路径中的电阻器两端的电流变化来监控马达907上的负载,例如通过将电阻器连接到a-d转换器来测量电流。电流将随着马达907上的负载变化而变化。电流测量可以实时测量或者可以包括延迟。高于或低于预定值的电流变化可以指示气体再流通系统900存在故障或安全问题,并且可以启动再流通泵905的关闭。软件可以包括在例如控制器940中,以感测电流的变化并启动马达907的关闭。
83.定义故障或安全问题何时发生的预定电流值可以基于气体再流通系统900正常运行时的平均电流。高于平均值的电流测量可指示故障或安全状况,例如断开的阀935或936或连接再流通泵905到患者腹膜腔的管道中的阻塞。例如,如果在正常操作期间当马达907驱动筒906中的隔膜时测量的平均电流是0.3a,则测量的0.4a的电流可以指示将再流通泵905连接到患者腹膜腔的管道中的阻塞,而测量的0.5a的电流可以指示阀935或936之一断开。可以使用其他方法或统计来定义故障或安全状况何时发生,例如通过使用测量电流的方差或与存储的时间模板或频率模板的比较。另外或可替代地,控制器940中的处理器能够
进行快速傅立叶变换,以分析当前测量信号的频率内容。
84.泵筒906和马达907之间的接口ml可以是机械接口。接口ml可以设计成在比外科手术过程中使用气体再流通系统的时间更长的连续时间段内充分运行。例如,如果外科手术的最长时间为4小时,接口ml可以设计为连续运行8小时而没有错误。
85.马达907的速度可被指定为允许以每分钟7升的速率输送co2气体。适用于马达907的马达可以包括品牌的高速马达。马达907的关键操作参数可以是扭矩、速度和故障状况。马达907的工作电流可以多种方式指定,例如正常工作电流、故障电流、充气状态电流和放气状态电流。这些电流值可用于定义马达907何时因故障或安全状况而关闭。
86.接口e1在马达907和dc马达控制电路978之间。接口el中可能有八条线。这八条线可以包括用于马达907的三个驱动相的每个的线、用于三个霍尔传感器拾取器的每个的线、用于给霍尔传感器供电的线以及用于接地的线。这八条线可能为多个马达制造商所共有。
87.接口e3位于dc马达控制电路978和处理器电路980之间。根据速度控制和反馈的方法,该接口可能有多条线。
88.可以使用两种方法来控制马达907的速度:电压和马达的数字控制。使用电压控制的第一种方法将导致处理器电路980通过电位计或脉宽调制信号向控制电路978发送电压。作为参考,在该方法中,可以通过让处理器电路980向马达控制电路提供3.25v的电压来达到马达907的全速。第二种方法包括处理器电路980向马达控制电路978发送数字信号。
89.气体再流通系统900可以检测两种可恢复的故障状态,例如充气故障状态和放气故障状态。可能出现不可恢复的其他故障状态,例如马达907的问题。充气故障状态可以是当气体再流通泵905的吸入侧上的气体回路断开,使得环境空气被吸入气体再流通系统900时,例如如果阀935与输出套管针915断开。这种状态被称为“充气”,因为如果再流通泵905没有关闭,再流通泵905可以用环境空气给患者的腹膜腔充气。如果充气故障状态发生,关闭再流通泵905的替代方案可以是将通过再流通泵905的气体流量减少到少量,以便使泵入腹膜腔的环境空气量最小化。放气故障状态可以是当气体再流通泵905的排放侧上的气体回路断开,使得来自腹膜腔的气体被泵送到周围环境中时,例如如果阀936与输入套管针910断开。这种状态被称为“放气”,因为腹膜腔可能由于气体再流通系统900的气体损失而开始放气。放气故障状态可导致连接到腹膜腔的吹气器的启动,以便在腹膜腔中保持期望的充气水平或压力。
90.气体再流通系统900可以通过用户界面945来控制。用户界面945可以位于气体再流通系统900中和/或连接到气体再流通系统900的计算机中。用户界面可以是软件控制的多模式界面,比如第一模式可以是输出,第二模式可以是控制。在输出模式下,控制器940中的处理器可以输出关于监控马达907的信息。这些信息可以包括马达速度(rpm)、电流(ma)、电压(v)和马达状态。
91.参考图10a-10b,示出了气体再流通系统1000的实施例。气体再流通系统1000可以包括与图1-9中描述的气体再流通系统相似的部件和操作特性。气体再流通系统1000可以包括隔膜致动器1081和马达联接臂1082之间的磁联接,使得当泵筒1006插入位置时,隔膜致动器1081上的磁体被吸引到马达联接臂1082上的磁体。一旦磁体被吸在一起,隔膜致动器1081将上下跟随马达联接臂1082,当马达联接臂1082上下移动时,引起泵筒1006中的泵送动作(如上所述)。磁联接可以是电磁体,其循环打开和关闭以产生和释放隔膜致动器
1081和马达联接臂1082之间的联接,例如用于去除泵筒1006。可替代地,磁联接可以是非电磁体。图10a示出了在隔膜致动器1081插入并联接到马达连接臂1082之前隔膜致动器1081上具有磁体的泵筒1006。图10b示出了插入后的泵筒1006且隔膜致动器1081磁联接到马达联接臂1082。
92.可替代地,不是使用具有曲柄臂的马达来上下移动隔膜致动器1081,而是可以使用振荡磁场来移动附接到或嵌入隔膜致动器1081的磁体,以便上下移动隔膜致动器1081并在泵筒1006中产生泵送动作。另外或可替代地,位于泵筒1006内的弹簧可以提供隔膜的向上运动,而带有曲柄臂的马达可以提供向下运动。这种布置可以消除将隔膜与马达曲柄臂联接的需要。
93.图11a-11f公开了将输入和输出管连接到套管针的阀的实施例,例如阀135、235、236、935和936。图11a中的阀1135可以包括具有可移动部分的可旋转套环,使得当阀1135牢固连接时,阀1135打开以允许气体流动,并且当断开时阻止气体流动。图11a示出了阀1135的分解图,阀1135可以包括公鲁尔锁接头1137,其与母鲁尔接头(未示出)连接并旋转以允许气体流动。阀1135还可以包括连接到输入或输出管的套管和管道连接1138、防止泄漏的o形环以及将其余部件保持就位的部件。图11b示出了阀1135的端视图,图11c示出了阀1135的侧视图。图11d、11e和11f示出了阀1135的剖视图。图11f示出了防止阀1135的公鲁尔锁1137接头部分过度旋转的凸片1139。
94.图12公开了阀1135在开放流动配置中的截面图。图12中的箭头公开了当公鲁尔锁接头1137旋转以允许气体流动时通过阀1135的气体流动路径。当阀1135连接到套管针时,公鲁尔锁接头1137在固定套筒1138内旋转,将公鲁尔锁接头1137中的开口与套筒1138中的开口对准,并允许气体通过。当阀1135断开时,开口变得不对准,并阻碍气体流动。
95.图13公开阀1135处于关闭流动配置的剖视图。图13中的箭头公开当公鲁尔锁接头1137旋转以阻止流体流动时气体流动路径停止在阀1135中。
96.图14公开了气体再流通系统1400的实施例。气体再流通系统1400可以包括与图1-13中描述的气体再流通系统相似的部件和操作特性。气体再流通系统1400可以包括位于输出管1425和输入管1420之间的旁通阀1483。图14中的箭头可以显示气体流动路径。旁通阀可以正常关闭,使得在输出管1425和输入管1420之间没有气体流动路径。当旁通阀1483打开时,它可以产生从输入管1420到输出管1425的气体流动路径,如图14中的箭头所示。从输入管1420到输出管1425的气体流动路径可以在泵筒1406周围产生流通气体回路,其可以限制在泵送循环期间可能产生的下游压力。例如,打开旁通阀1483可以将一部分气体流从泵筒1406转移到输出管1425中,这可以防止旁通阀1483下游的压力增加。旁通阀1483可以是单向泄压阀,例如微型阀或halkey/阀,例如鸭嘴阀或弹簧加载阀。旁通阀1483可以基于旁通阀1483的入口侧或泵筒1406下游的另一位置处存在的压力来选择自动打开。例如,根据应用,旁通阀1483可以选择在低至0.1psi的压力至高于10psi的压力下打开。优选地,当压力大约在0.15psi至0.55psi的范围内时,旁通阀1483打开。
97.图15a-b公开了湿气阱的实施例,例如湿气阱130、230和930。图15a-b中的湿气阱1530可以位于输出管道(未示出)中,在那里气体从患者流向再流通泵(未示出),如图15b中的箭头所示。图15b示出了湿气阱1530的截面图,其包括在湿气阱1530内延伸的管1584。管1584从湿气阱1530的气体入口侧开始,并且可以向湿气阱1530的出口延伸,但可以不接触
湿气阱1530的出口,使得管1584的端部和湿气阱1530的出口之间存在间隙。该间隙可以允许位于气体内的液体在气体到达湿气阱1530的出口之前流出。从气体中去除的液体可以收集在湿气阱1530内。管1584的端部和湿气阱1530的出口之间的间隙的大小可以根据应用而变化。例如,具有较高气体速度的应用可能需要较大的间隙以允许气体中的液体流出,而具有相对较低气体速度的应用可能需要较小的间隙以允许气体中的液体流出。湿气阱1530可以不包括吸收介质来收集湿气阱1530内的液体。湿气阱1530及其部件可以由与液体接触的任何合适的材料构成,例如塑料或金属。
98.图16a-b公开了湿气阱的另一实施例,例如湿气阱130、230、930和1530。图16a-16b中的湿气阱1630可以位于输入管道(未示出)中,在那里气体从再流通泵(未示出)流向患者,如图16b中的箭头所示。图16b示出了湿气阱1630的截面图,该湿气阱1630包括均在湿气阱1630内延伸的输入管1685和输出管1685。输入管1684从湿气阱1630的气体入口侧开始,并且可以向湿气阱1630的出口延伸。输出管1685从湿气阱1630的气体出口侧开始,并且可以向湿气阱1630的入口延伸。输入管1684和输出管1685可以在湿气阱1630内延伸经过彼此,产生如图16b所示的重叠,使得从入口管1684进入湿气阱1630的气体在没有首先流过湿气阱1630的内部的情况下不能直接流入输出管1685。图16b示出入口管1684和出口管1685可以包括弯曲部,使得管的部分重叠,同时入口管1684的入口和出口管1685的出口保持轴向对齐。当气体流过湿气阱1630的内部时,并且在它通过输出管1685流出湿气阱1630之前,气体中的液体可能会流出。从气体中去除的液体可以收集在湿气阱1630中。湿气阱1630可以不包括吸收介质来收集湿气阱1630内的液体。湿气阱1630及其部件可以由与液体接触的任何合适的材料构成,例如塑料或金属。
99.图17a-c公开了气体再流通系统1700的实施例。气体再流通系统1700可以包括与图1-16中描述的气体再流通系统相似的部件和操作特性。气体再流通系统1700可以包括再流通泵外壳1786,其容纳气体再流通系统1700的一些部件,例如再流通泵1705、泵筒1706、马达1707、控制器1740、用户界面1745、电源1776、dc马达控制电路1778和处理器电路1780。
100.图17a公开了筒门打开的气体再流通系统1700,示出了安装在外壳1786内的泵筒1706。图17c是气体再流通系统1700的详细剖视图,示出了泵筒锁定机构1787。泵筒锁定机构1787可包括弹簧1788,球1789位于弹簧1788的一端。弹簧1788可以通过球1789在泵筒1706上施加力,这可以将泵筒1706锁定在外壳1786内。可替代地,弹簧1788可以在没有球1789的情况下直接在泵筒1706上施加力。
101.图18a是气体再流通系统1700的透视图,其中泵筒1706处于预插入位置。图18b是气体再流通系统1700的透视图,其中泵筒1706安装在外壳1786中。
102.图19a是气体再流通系统1700的透视图,其中筒门关闭。图19b是气体再流通系统1700的透视图,其中筒门打开并且没有泵筒1706。
103.图20a-20f公开了筒门关闭时气体再流通系统1700的视图。图20a-20f中所示的尺寸是示例性的并且可以基于气体再流通系统1700的应用来修改。
104.图21a-21h公开了气体再流通系统2100的实施例。气体再流通系统2100可以包括与图1-20中描述的气体再流通系统相似的部件和操作特性。气体再流通系统2100可以包括带有编码连接器2190的泵筒2106。连接器2190可以在美国专利号9283334号中描述,该专利在此引入作为参考。连接器2190能够识别正确的泵筒2106是否连接到再流通泵2105,泵筒
2106是否以前使用过,或者能够选择和设置气体再流通系统2100根据特殊设置例如流速来操作。图21a-21h示出了带有连接器2190的泵筒2106的透视图。
105.图22a-b公开了气体再流通系统2200的实施例。气体再流通系统2200可以包括与图1-21中描述的气体再流通系统相似的部件和操作特性。气体再流通系统2200可以包括允许泵筒2206(未示出)以“盲”方式与马达联接臂2282联接的部件,使得用户可以将泵筒2206插入气体再流通系统外壳2286(未示出)中,而不知道马达联接臂2282的确切位置,也不弯腰查看外壳2286内部以查看马达联接臂2282的位置。图22a示出了从马达联接臂2282的前部延伸的联接轴2291。联接轴2291可以包括锥形端部,以帮助将联接轴2291插入隔膜致动器2281中的相应开口中(图22a-22b中未示出,图5、6、8和21中示出)。隔膜致动器2281可以包括相应的锥形开口(如图21所示)。定位销2292可以从马达联接臂2282的后部延伸。定位销2292可以装配在定位槽2293内。图22b示出了从马达联接臂2282延伸的联接轴2291和定位销2292的详细视图。定位槽2293可以在马达2207的安装座或外壳2286的其他固定部分中找到。当马达2207使马达联接臂2282上下移动时,定位销2292将在定位槽2293中上下移动。定位槽2293将限制定位销2292的侧向运动。因为定位销2292与马达联接臂2282连接,定位销2292的受限的侧向运动将确保马达联接臂2282和联接轴2291保持在大致相同的竖直平面内,而不管马达2207停止时马达联接臂2282位于何处。因此,用户可以容易地将泵筒2206插入外壳2286中,并将隔膜致动器2281与马达联接臂2282联接。
106.图23a-f公开了气体再流通系统2200的部分视图。图23a示出了用于马达2207和马达联接臂2282以及联接轴2291的安装座的前视图。图23b示出了马达2207的安装座以及马达2207、联接轴2291和定位销2292的截面侧视图。图23c示出了分别位于马达联接臂2282的前部和后部的联接轴2291和定位销2292的详细视图。图23d示出了马达2207以及马达2207和定位销2292在延伸穿过定位槽2293时的安装座的侧视图。图23e示出了马达2207以及马达2207和定位销2292在延伸穿过定位槽2293时的后视图。图23f示出了定位销2292在延伸穿过定位槽2293时的详细后视图。
107.图24a-b公开了气体再流通系统2400的实施例。气体再流通系统2400可以包括与图1-23中描述的气体再流通系统相似的部件和操作特性。气体再流通系统2400可包括在腹腔镜手术完成后从患者腹膜腔中排出co2气体的部件。通常,当腹腔镜手术完成时,插入患者体内的套管针上的鲁尔连接被打开,这允许来自患者腹膜腔内的co2气体逸出到手术室中。不希望地,逸出的co2气体没有被过滤,并且可能含有手术过程中残留的雾化的化学物质、颗粒、细菌等。
108.气体再流通系统2400可以包括位于输入管2420中的三通阀2494。输入管2420流向患者。图24a示出了三通阀2494可以位于过滤器2432的下游,使得流过三通阀2494的任何气体已经过滤掉杂质。图24b是气体再流通系统2400的详细视图,示出了三通阀2494、输入管2420、输出管2425和过滤器2432。在外科手术结束时,在再流通管2420、2425被移除之前,并且当再流通泵2405仍在运行时,三通阀2494可以配置成阻止气体流向患者并且允许气体流向手术室。以这种方式,再流通泵2405将利用过滤器2432从患者腹膜腔内泵出co2气体,防止任何污染物离开患者。利用三通阀2494来允许气体流向手术室,而不是简单地将输入管2420与患者断开,通过保持外科手术过程中存在的与患者的所有气体连接,确保只有来自患者的进入手术室的气体首先通过过滤器2432过滤。利用三通阀2494从患者体内去除co2
气体可以降低手术室工作人员的风险,而不需要额外的装置来确保逸出的co2气体的清洁度。
109.图25a-b示出了与输入管道2420隔离的三通阀2494。三通阀2494可以包括两个直列倒钩接头2495,以与输入管2420连接。三通阀2494还可以包括垂直于两个直列倒钩接头2495定向的母鲁尔连接2496。母鲁尔连接2496可用于减压目的,例如将co2气体释放到手术室中。三通阀2494还可以包括旋塞阀2497,其旋转以调节三通阀2494的开放流动路径。如图25所示,通过三通阀2494的闭合流动路径由旋塞阀2497的“关”部分表示。图25a示出了三通阀2494,其配置成允许气体流过两个直列倒钩接头2495,其可以与通向患者的输入管2420连接。图25a可以是再流通功能期间使用的配置。图25a中的三通阀2494的构造可以防止气体释放到手术室中。图25b示出了三通阀2494,其配置成允许气体通过母鲁尔接头2496流出并进入手术室。图25b可以是当气体从患者体内排出时在外科手术结束时使用的配置。图25b中的三通阀2494的配置可以防止气体流向患者。
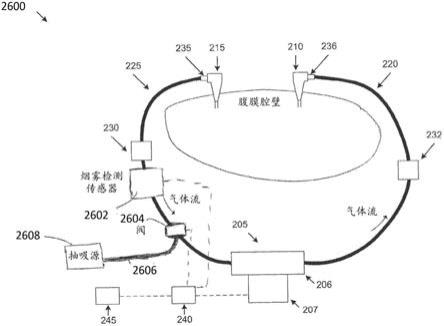
110.现在描述气体再流通系统的另一实施例,其包括对检测到的烟雾含量变化的自动响应,并且可以包括上述1-25的气体再流通系统的任何一个或多个特征。具有烟雾检测的图26的示例性气体再流通系统2600包括许多与图2中描述的气体再流通系统200相同的特征和部件。在图26中,来自图2的类似部件用与图2中相同的标识号来标记。然而,与气体再流通系统200不同,气体再流通系统2600还包括与控制器240通信的烟雾检测传感器2602。此外,如图26所示,包括可由控制器240控制的阀2604,以将气体从离开腹膜的管道输送到流通泵205,或者输送到抽吸排气管2606,其接收来自抽吸源2608的抽吸并将气体和烟雾排放到封闭系统外部的目的地。如下文不同实施方式中所述,在一些实施例中,阀2604、抽吸排气管2606和抽吸源2608可以省略。
111.气体再流通系统2600可以包括烟雾检测机构,其自动开始和停止过滤手术产生的烟雾,或者自动调节过滤速度。烟雾检测传感器2602与控制器240通信,烟雾检测传感器2602可以沿着气体再流通装置和腹膜(如图所示)之间的气体路径定位在气体泵205中,或者甚至定位在腹膜本身中。为了提供用于测量烟雾的受控环境,预期烟雾检测传感器2602可被实现为沿着气体管道离开腹膜的路径的独立传感器,而不是在腹膜中或在srs本身中,然而这些其他位置也是可以考虑的。控制器240可以使用关于由传感器2602检测到的烟雾的量或者量和持续时间的信息,以基于检测到的烟雾的确定量和/或持续时间自动调节泵205中的气体再流通马达的马达207的速度。气体再流通系统2600还可以可选地包括阀2604,其可由控制器240选择性地控制,以在输入和输出管220、225以及包括在其中的气体去除过滤器230、232的封闭系统内的气体再流通之间进行选择;以及抽吸排气管2606,其与抽吸源2608连接,如果烟雾浓度上升到预定最大值以上,该抽吸源2608将快速去除气体和烟雾。许多已知的抽吸源中的任何一种(包括独立的泵或医疗设施中内置的壁挂式抽吸端口)都可以用作抽吸源2608。
112.抽吸源2608可以固定在预定的流速下,或者可以调节到多种流速中的任何一种。在一实施方式中,尽管10-12升/分钟的流速对于抽吸源2608来说是可接受的,但可以设想抽吸源2608能够具有12升/分钟(lpm)的最小流速。在一些实施方式中,当烟雾积聚太快以至于泵无法自行处理时,设想抽吸源的最小流速为15lpm,以提供比马达所支持的更快的流量。在实施方式中,当抽吸源是固定流速源时,抽吸源可以总是开启,或者由控制器240控制
处于开启或关闭状态。阀2604可由控制器240调节,以在抽吸源2608总是开启或者仅在开启和关闭状态之间可控的实施方式中调节施加到被去除的再流通气体的抽吸流速。在其他实施方式中,抽吸源2608可以是可由控制器240调节的可变流速抽吸源。
113.烟雾检测器传感器2602可以是不同类型的烟雾检测器技术。这些不同技术的示例可以包括电化学传感器、色谱、光学或光电传感器、音频传感器或电配对。合适的电化学传感器包括电离烟雾检测器电路,例如使用镅241电离气体并在相邻电极中产生电流的电路。也可以使用许多其他电化学气体传感器中的任何一种,例如可从伊利诺伊州阿灵顿高地的费加罗美国公司获得的费加罗tgs5342或tgs 5541-poo电化学传感器。关于色谱或光电传感器,可以在不同的实施例中实现光学或光电烟雾检测器,其感测来自诸如发光二极管(led)的光源的直接或反射光。音频检测器可被实现为检测操作中的烟雾产生装置(例如烧灼装置)的声音,以触发这里描述的烟雾排出功能。此外,可以使用烟雾产生装置和烟雾排出设备之间的直接电配对,使得烟雾产生装置的操作导致信号被传输到烟雾排出系统,以与外科医生使用烧灼器或其他烟雾产生装置相协调地停止和开始。在一实施例中,只有一种传感器技术可以实现为烟雾传感器。在其他实施例中,可以实现多于一种传感器技术的组合。
114.图27示出了使用光电传感器装置的烟雾检测传感器的一个示例。在图27的实施例中,传感器2702沿着气体流动路径成内联定位,例如邻近输送来自腹膜的气体的管道2703,在管道2703上或管道2703中。传感器包括壳体2704,其包括光源2706,例如红外激光器或明亮的led,其发射穿过气体流动路径的光。紧邻光源2706定位的感光器2708可以放置在色散检测装置中,使得没有光从光源2706以直接路径到达感光器2708。替代地,感光器2708以只能接收来自光源2706的光的角度定位,该光在离开光源之后已经从气体反射。因此,当烟雾进入气体流动路径时,来自光源2706的光被烟雾中的颗粒物质反射到感光器2708,导致感光器产生被传送到控制器240的输出信号。烟雾检测器传感器可以通过有线或无线连接2710将该输出信号传输到控制器240。在不同的实施例中,输出信号可以通过在烟雾检测传感器2702中使用多于一个的感光器2708来捕获更多分散的光来改善。
115.在替代实施方式中,红外光源2706和感光器2708可以定向成彼此直接面对,使得来自光源的直射红外光束到达感光器。在这种直射束布置中,气体流中的任何烟雾将反射一些或全部光,使得较少的光到达感光器2708。控制器240可以使用输出信号幅度来确定气体中存在的烟雾量。在一些实施方式中,传感器2702中的电路可以配置成使得输出信号的幅度随着烟雾浓度的增加而增加。可替代地,已知初始输出信号水平的幅度的减少量可以指示气体流中存在的烟雾量。
116.在色谱/光电传感器布置的又一实施例中,如图28所示,烟雾检测传感器2802可以是基于非色散红外(ndir)原理的双波长/双检测器传感器。这种替代类型的传感器2802也可以适于沿着气体流动路径放置,并且包括壳体2804,其在强宽带光源2806的直接路径中具有两个感光器2808、2809,该光源2806在本文中也可以称为发射器,其产生co2检测所需的波长。例如,在再流通co2气体的系统中,一个感光器2808可以设置为检测被co2气体吸收的4.2μm波长,而第二感光器2809可以设置为检测不受任何气体影响的3.9μm波长,但会受到任何烟雾的颗粒物质的影响。感光器输出的组合然后可以允许控制器240以百万分之一计来确定co2气体的质量。在一可替代实施方式中,感光器2808、2809可以各自包括不同的
薄膜滤光器(tff),其具有波长带通分布,该波长带通分布被调谐以检测烟雾中的构成气体或颗粒中的相应不同的一种,例如一氧化碳。
117.参考图29,烟雾传感器2902可以位于泵205中或附近,而不是位于输入或输出管道中或附近。在利用一个或多个光电发射器和一个或多个光电检测器作为烟雾感测传感器技术的一些实施例中,传感器2902可以位于泵205中,例如位于泵205的可移除筒206中。如图30所示,一个或多个光电发射器3006和多个检测器3008可以邻近筒506定位,使得流通流穿过发射器3006和检测器3008之间的光路3009。发射器3006和检测器3008不与再流通气体流体接触,而是由筒材料隔离,该筒材料至少在邻近光电发射器3006和检测器3008的区域中对光电发射器透射的波长是透明的。与接触流体的传感器相比,传感器与气体的物理隔离可以改善系统的生物不相容性风险。此外,这种隔离可以通过保护传感器免受腐蚀和冷凝水以及手术烟雾的其他化学成分的污染而降低性能,从而提高系统的鲁棒性。图30示出了来自图5的筒506的修改版本,但任何先前示出的泵筒都可被修改以包括这里公开的传感器。
118.用于向传感器的发射器3006和检测器3008供电的电接触可以在筒插入再流通装置的位置进行。将检测器3008定位在再流通泵附近减小了信号传输距离和电磁信号干扰程度。将检测器3008定位在泵的近侧还可以最小化对电线的需求,如果导线在管组内通过,可能会损害流动或生物相容性。此外,将传感器定位在筒处可有助于避免手术空间杂乱和缠绕/绊倒危险,这种危险是较长的布线从位于沿着管距离泵更远的传感器经过管组之外。
119.参考图31,示出了烟雾传感器2902的示例性检测器3008的阵列。传感器的检测器可以各自配备有薄膜过滤器(tff)3001,每个具有波长带通分布,该波长带通分布被调谐以检测烟雾中的构成气体或颗粒中的不同的一种,如上所述。来自这些检测器的相应信号水平由再流通泵控制器合成,允许检测各种气体成分特征和浓度。用于给传感器2902供电的电力可以通过有线连接获得,例如通过布置在可移除筒506上的电触点,其与泵205的壳体上的电触点配合。来自检测器3008的数据信号可以通过有线或无线方式传输到控制器240。例如,可以包括集成电路的印刷电路板组件(pcba)3003电连接到每个检测器3008,或者可以是一系列集成电路,每个专用于相应的一个检测器3008,而用电线不是将数据传送到控制器或烟雾去除系统的其他部分。该pcba可以配置为将信号无线传输回再流通泵和/或泵控制器,以传送光电传感器的本地感测输出。
120.在其他实施例中,传感器2602、2902可以是电化学传感器3200,如图32所示。与光电传感器版本一样,电化学传感器3200可以沿着管定位或位于管中(输出或输入),或者位于泵处。电化学传感器3200可以具有与电化学传感器电路3203电连通的工作电极3201和一个或多个反电极3202。在电化学传感器3200或者至少电化学传感器的电极3201、3202放置在输入管中的实施例中,电化学传感器的工作电极3201与再流通气体流体接触,并且电线可以用于与控制器240和烟雾再流通装置的其余部分电连接。在替代实施例中,可以实现电化学传感器的无线布置,而不是有线版本。例如,无线通信电路可以与电化学传感器集成在一起,而不是用电线将数据传送到控制器或烟雾去除系统的其他部分。类似于上述光电传感器版本,电化学传感器版本的无线通信电路可以是集成电路,或者印刷电路板组件上的分立电路,具有电连接到电化学传感器的嵌入式无线发射器。无线发射器可以配置为将信号无线发送回再流通泵和/或泵控制器上的接收器,以传送电化学传感器3200的本地感测
输出。在不同的实施例中,电化学传感器实施例的有线版本或无线版本可以沿着输入管或输出管放置或放置在输入管或输出管中,或者沿着泵的泵筒放置或放置在泵筒中。例如,电化学传感器3200可以位于泵筒的壁中,例如筒506(图5b)的壁中,其中工作电极3201在管组的近端部分与再流通气体流体接触。电化学传感器3200然后可以在插入位置与泵或气体再流通装置的其他部分电接触。
121.如图33-35所示,电化学传感器3200可以放置在气体再流通泵筒3306的底壁3305中。电化学传感器3200可被定向成工作电极3201朝向筒3306的内部气体接触部分,使得它靠近气体流(用箭头3307示出)。工作电极3201可以在管组的近端部分与再流通气体流体接触,并且传感器的反电极3202(两个电引线)暴露,使得在泵筒3306插入泵中时,与泵中的相应配合垫形成电连接。
122.图34示出了具有气体再流通系统的泵马达的改进的马达组件3500的马达外壳3400,图35示出了从马达外壳3400移除的气体再流通系统的改进的马达组件3500。图34-35中的马达外壳3400和改进的马达组件3500与泵筒3306连接,但示出为没有泵筒3306,以更好地示出对应于泵筒3306的底壁上的电极3201、3202的导电配合垫3401、3402的位置。然后,泵筒3306以与上面图18a中所示的筒1706插入的方式相同的方式可移除地插入到马达外壳和马达组件中。尽管改进的泵外壳3400和改进的马达组件3500示出为上面图19b和22a中所示的泵和马达系统的改进版本,但可以设想可以与可移除的泵筒一起工作的多种不同的泵壳体和再流通系统配置中的任何一种。此外,如图36的示例所示,电化学传感器3200在筒3606上的其他位置也是可以考虑的,例如在筒3606的侧壁上,而不是在图33所示的底部。然后,马达外壳和/或马达组件中的互补配合垫将被重新定位到这些部件中的相应侧壁上。
123.在其他实施方式中,如图37-38所示,烟雾检测传感器比如电化学传感器3200可以放置在气体再流通泵管组的输入公鲁尔阀3701中。以这种方式,工作电极可以在管组的近端部分与再流通气体流体接触。从电化学传感器3200延伸到再流通泵的电线3700可用于将信号从传感器3200电传输到泵。图37示出了输入鲁尔阀3701中的传感器3200接收来自患者的气体,而图38示出了输出鲁尔阀3801中的传感器3200,用于通向患者的气体管线。在不同的实施例中,一个或两个鲁尔阀可以容纳电化学传感器3200或其他类型的烟雾检测传感器。此外,电线3600不是在从传感器3200到泵的管内延伸,而是电线3600可以在鲁尔阀处或附近离开管组,并在管外延伸到泵、泵控制器或其他目的地。将传感器放置在鲁尔连接中可能比烟雾去除系统中的其他位置具有某些优势,包括响应时间减少和/或由于更靠近烧灼位置而灵敏度增加。此外,相对于放置在泵中,这种放置可以延长传感器的寿命,并通过将其与泵的机械振动物理隔离来减少可能的磨损。
124.利用26-38的气体再流通系统,气体再流通系统2600、2900的操作方法描述如下。在第一实施方式中,如图39所示,气体再流通系统的控制器240可以监控烟雾检测传感器2602、2902的输出信号,以检测输出管225中的气体中的烟雾浓度(在3902)。如果检测到的气体浓度大于预定阈值(在3904),则控制器240可以与泵205的马达207通信,以增加气体的流通速度,从而增加从气体中过滤烟雾的速度(在3906)。在一实施例中,在烟雾检测传感器是基于光的传感器(例如用于检测来自诸如发光二极管或激光源的光源的光)的情况下,预定阈值实际上可以是多个阈值,每个与基于因气体中的烟雾引起的光衰减或反射量的不同马达速度变化相关。例如,基于检测到的光衰减/反射,泵205的马达207可以设置为增加的
默认速度,或者如果已经增加,则朝着默认速度减少。
125.在增加气体流通的速度之后,控制器240然后可以检查传感器2602、2902,以查看烟雾浓度是否已经降低到相同(或不同)阈值密度以下(在3908)。控制器可以继续检查烟雾密度的下降,直到其下降到预定阈值以下,然后降低马达速度(在3910)。这个过程可能会重复。控制器240检查传感器2602、2902并将检测到的密度与适当的阈值进行比较的时间可以是连续的,或者可以是预定的规则时间间隔。此外,在一实施例中,泵可以响应于检测到的烟雾浓度而打开或关闭。可替代地,泵205可以配置用于连续操作,并且控制器将马达速度从默认速度增加到更高速度,然后从该更高速度回降到默认速度。在替代实施例中,马达207能够在速度上进行可变调节,超过开或关设置,或者在初始非零速度和更高速度设置之间。在该替代实施例中,控制器240配置成在最小速度和最大速度之间以仅由马达207的速度调节粒度限制的步长,与检测到的烟雾密度(例如从传感器2602、2902接收的输出信号的大小)成正比地改变马达的速度。马达可以是无级变速马达,或者具有控制器可以访问的多个不同速度。
126.在一实施方式中,泵马达速度增加与被再流通的气体中感测到的烟雾的关系可以基于传感器2702、2802中检测到的光衰减量。例如,从默认泵马达速度开始,如果投射到气体中的光的检测衰减为1%或更小,控制器可以不对马达速度进行任何改变。如果检测到的衰减大于1%且小于或等于3%,泵马达速度可增加10%,如果检测到的衰减大于3%且小于或等于10%,泵马达速度可增加25%。最后,在该实施方式中,如果检测到光的衰减大于10%,马达速度可以增加40%。对于气体再流通系统,可以使用的一个默认流速(当检测到小于或等于1%的光衰减时)可以是12升/分钟(lpm),并且基于检测到的烟雾增加的泵马达速度增加了该流速。预计泵马达速度的增加和流速的增加之间的关系将不是线性的,然而控制器240可以设置成将马达速度增加期望的百分比,或者可以进行补偿以调节马达速度,从而在其他实施方式中实现期望的流速增加。在另一实施方式中,默认马达速度或流速可以由用户调节,并且增加的马达速度或流速的范围可以由用户通过控制器定义。
127.在不同的实施例中,控制器240可以实现除了上述瞬时烟雾浓度之外的更复杂的烟雾感测标准。例如,由控制器240执行的图39的开/关或低速/高速决策可以与持续时间因素相结合,例如在检测到的烟雾密度高于或低于相关预定阈值的情况下经过的时间或连续离散测量的次数。因此,可以在步骤3904和3908中修改图29的方法,以要求在触发马达速度增加之前,检测到的(对于步骤3904)烟雾已经在预定水平以上达预定时间。类似地,对于步骤3908,控制器可以配置为仅当烟雾密度和持续时间的组合满足预定的较低阈值时降低马达速度。双因素密度和时间分析也可能导致一系列不同的组合—例如,在较短的持续时间内非常高的烟密度,或者在较长的持续时间内稍低的烟密度,都可能导致控制器提高马达的速度。控制器可被编程为执行存储在其存储器或独立存储器中的代码,以利用内部时钟信号或计数器来处理来自烟雾检测传感器的传感器输出,从而确定是否已经满足用于提高或降低泵205的马达速度的预定阈值要求。类似地,如针对图39的仅烟雾密度实施例所讨论,马达可以具有无级变速调节(或不仅仅是双速调节)能力,烟雾密度和该烟雾密度的持续时间的综合数据可以与该能力一起使用。以这种方式,控制器240可以执行算法或密度和持续时间的预定设置的查找表,以对泵马达207进行变速调节。因此,在外科手术过程中,烟雾检测传感器可以检测腹膜内气体中的烟雾,并且控制器240可以关联检测到的烟雾量来
控制流通速率,以过滤掉气腹内的烟雾,从而始终提供理想的手术区域。烟雾密度(例如光衰减)和泵马达速度或流速的预定或用户可选择的范围可以存储在控制器240内的易失性或非易失性存储器中,或者可由控制器240访问。
128.当检测到烟雾高于特定阈值时,调节泵速以流通或更快地流通气体的实施例可能不总是提供足够快的烟雾去除能力。再次参考图26,系统2600可以可选地包括定位在气体流动路径输出225上的阀2604,以从过滤掉烟雾的关闭的再流通系统切换到排放模式,在该模式下,填充烟雾的气体可以快速分流到抽吸排气管2606,以获得更高的烟雾去除率。
129.如图40所示,阀2604可由控制器240控制,以将阀门4002从将所有气体通过封闭系统再流通路径的管道输送到第二位置(虚线)的位置摆动,在第二位置,气体替代地被转移到抽吸排气管2606。抽吸排气管限定通向抽吸源2608的排气/去除路径,如前所述。可替代地,在替代实施例中,阀2604可以直接从烟雾检测传感器2602接收激活信号,其中直接来自传感器2602的足够高的输出信号导致阀打开抽吸排气路径。图40的示例集中在图26的实施例中,其中烟雾传感器位于管中,然而,图29的实施例(烟雾检测传感器2902在泵或泵筒中)也可以修改为在气体输入或输出管中包括抽吸排气管、阀和抽吸源,类似于图26所示,并且操作如图40所述。
130.如图41所示,在具有气体检测的气体再流通系统2600的一些实施方式中,抽吸排气管2606和阀2604可用于不同水平的烟雾检测,以提供比通过烟雾去除过滤器的再流通泵速度增加时更快的烟雾去除选择。图41示出了在系统2600中去除烟雾,该系统包括封闭气体再流通模式下的可调节气体再流通速度和将填充烟雾的气体排出封闭再流通系统的可选择抽吸排气。该过程的第一步骤是使用气体传感器2602检测气体中的烟雾(在4102)。然后确定是否存在足够的烟雾来启动(在如前所述的开/关实施例中)或增加(在泵总是开启的实施例中,无论是具有有限的速度步长还是无限可变的)泵的马达的速度(在4104)。如果烟雾量足够高以启动或增加泵速度,但没有超过需要使用抽吸排气路径的较高阈值(在4106),则控制器240可以适当地启动或增加泵马达速度(在4108)。如果检测到的烟雾量足以触发较高阈值抽吸路径(在4106),则控制器240将替代地启动阀2604,以通过抽吸源2608排出气体和烟雾,并绕过系统2600的关闭的再流通路径(在4114)。控制器可以使用随后的烟雾传感器2602测量(在4104、4110)来在烟雾量减少时减少或关闭泵马达207(在4112)。
131.如现有烟雾感测实施例中所述,可以使用不同的烟雾测量标准。在一个实施方式中,烟雾量可以是单次瞬时测量。或者,烟雾测量可以是在一段时间内测量的烟雾量的组合,其中使用给定时间内的平均量。此外,不同烟雾密度和这些烟雾密度的相关持续时间的组合可以触发泵马达速度的增加或降低,或者可以满足触发控制器使用吸入排气路径的阈值。
132.参考上面的光衰减和泵马达速度(或流速)的示例,用于打开阀2604以通过抽吸源排出气体的阈值可以是大于为最高马达速度设置而设置的光衰减量(例如,与先前示例中启动最高马达速度的10%衰减相比,阀排出到抽吸源的光衰减为20%)。可替代或组合地,用于启动阀以通过抽吸源排出气体的阈值可以包括感测到的光衰减百分比的阈值持续时间。例如,如果由于气体中的烟雾引起的预定感测光衰减的持续时间超过特定的时间限制,控制器240可以触发阀2604连接抽吸源2608并绕过泵以通过抽吸源排出填充烟雾的气体。
133.还可以设想,关于来自腹膜的气体的其他感测标准可以与气体浓度和/或持续时
间测量组合地或分开地使用。例如,系统2600、2900可以包括温度传感器,其放置在气腹中或者沿着抽吸/过滤管道的路径放置,这将允许实时确定气腹的温度。该温度测量然后可以使控制器根据需要启动气体的运动,以冷却气体。温度传感器可以集成到泵205中,添加到安装在腹腔镜手术中使用的另一仪器上的烟雾检测传感器2602、2902中,或者可以是放置在再流通系统的管道中的独立传感器。温度传感器可用于检测气体中与存在的烟雾量相关的热传递速率差。例如,与无烟二氧化碳相比,填充烟雾的二氧化碳气体的热传递速率可以具有不同的热通量特性。作为更具体的示例,二氧化碳相对于氮气的k因子为0.658,而一氧化碳相对于氮气的k因子为1.00(其中k=l/((气体密度)x(比热系数))。因此,保持流速不变但增加一氧化碳浓度会降低热通量。
134.本文讨论的其他传感器以及预期单独或组合使用的其他传感器技术包括用于检测外科手术烟雾的预期化学成分(例如一氧化碳)的化学感测、声波或超声波传感器、磁传感器、色谱传感器以及使用信号和活动传感器的烧灼装置(例如调谐到烧灼装置在工作时已知发出的独特音频信号的传感器可以在麦克风型传感器处被检测到并用于触发气体再流通系统中泵速的增加)。例如,关于音频传感器,当电外科单元主动烧灼时,其发出(产生)连续的3hz音频音调的电外科单元可被音频接收器电路检测到,该音频接收器电路利用调谐到相同频率的带通滤波。可以测量音调的持续时间来确定烧灼的持续时间。可替代地,可以类似地检测电外科单元,其在烧灼开始时发出3khz的三脉冲音调,然后在烧灼停止时发出另一个,并且可以计算两个三脉冲音调序列之间的时间来确定烧灼的持续时间。烧灼持续时间的最终确定可用于调节马达速度,或者用于调节马达速度并在各自不同的阈值处触发烟雾排出旁路,类似于烟雾密度可如何用于上述烟雾传感器实施例。
135.一个或多个烟雾检测传感器在烟雾去除系统中的不同位置,例如在管道中或沿着管道,在泵或泵筒中或沿着泵筒,或在连接器中,都具有彼此不同的潜在优势。相对于放置在一个鲁尔连接器中,在放置在管道中或沿着管道放置的情况下,优点可以包括当用户手动操纵(断开/连接)鲁尔连接器时减少传感器损坏的可能性,并且减少手术部位的设备数量以提高可用性和人体工程学。此外,相对于放置在泵中而言,放置在管道中或沿着管道放置可以包括与放置在鲁尔连接器中类似的优点,例如由于更靠近烧灼位置而减少响应时间和/或增加灵敏度,并且可以通过将传感器与泵的机械振荡物理隔离来潜在地减少可能的传感器磨损。
136.虽然已经描述了本发明的各种实施例,但对于本领域普通技术人员来说,很明显,在本发明的范围内,更多的实施例和实施方式是可能的。所公开的各种实施例的元件可以组合并适于创建具有实施例的一些或全部操作特性和优点的系统。在本技术中本文公开了任何这样的组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
