1.本发明涉及防止水径流和溢流的保护屏障的领域。
背景技术:
2.当从例如河流、湖泊或海洋之类的水体中溢出水时可能发生溢流。在一些情况下,水会漫过堤坝或冲破堤坝,从而导致一些水逸出其常规边界。
3.地表径流(也称为地面径流)可能因区间洪水中雨水在饱和地面上累积而导致。导致的原因可能是土壤容量饱和、雨水到达的速度比土壤能吸收雨水的速度快、或是因为不透水区域(屋顶和路面)将其径流输送到无法吸收所有径流的周围土壤。
4.可以在特定区域周围临时放置屏障,以防止洪水或水径流进入受保护区域。
5.有各种系统能用来制造屏障,以保护房屋(或其它建筑物或地面)免受尤其水或污泥或工业液体的溢流或水径流的风险。
6.有利地,屏障可以由数个模块构成。所述模块可以分开运输并在现场相互组装。以此方式,这些模块使得有可能获得防止地表水流的保护屏障。另外,与单片解决方案相比,这些模块化解决方案更容易拆卸和堆装。
7.此外,在通过将数个模块组装在一起来安设保护屏障后,很难获得模块在面对洪水或水径流时的性能信息。
8.此类信息对于有利地实时了解保护屏障的运行状况和综合性能至关重要。
9.例如,如果水位上升过快或水压过高,则可能有必要预测其它解决方案来加强对区域的保护。无论如何,屏障的机械完整性必须得到保证。
10.本技术促进改进解决方案。
技术实现要素:
11.根据本发明的一个方面,提出一种用于实施防止液体径流和/或溢流的保护屏障(1)的模块(2),所述模块包括:
[0012]-拦挡部件,其适于将液体主体拦挡在位于保护屏障的前侧的前部区域(a),
[0013]-至少一个传感器(6),其适于获取关于模块或关于液体主体的至少一个信息;
[0014]-至少一个安全阀(10),所述安全阀(10)适于根据由传感器获取和提供的信息从关闭状态致动到打开状态。
[0015]
借助于这种布置,可以提供智能保护布置,其中可通过打开一个或多个安全阀来监控和保留/保障保护屏障的机械完整性。在屏障的机械完整性受到危害的情况下,通过安全阀排放一定量的水有利于降低拦挡水对屏障施加的应力。
[0016]
应理解,最好让一些水通过,而不要造成部分或全部保护屏障突然破裂的风险。
[0017]
重要的是应注意,激活/打开安全阀的决定可以在模块本地进行,或者在从各种传感器/模块接收信息的服务器处远程进行。
[0018]
即使保护屏障没有受到危害,也可以执行沿着保护屏障打开一个或多个安全阀,
但其目的是调节保护装置下游的部件。
[0019]
在各种实施例中,可以寻求单独或组合地采用的以下布置中的一种和/或另一种布置。
[0020]
根据一个方面,所推广的模块可适于组装到其它类似模块(2)以实施保护屏障(1),模块(2)通过附接装置(5)彼此组装。此类附接装置可以补偿沿着保护屏障的错位,允许建立弯曲的保护屏障,以及缓解不平坦的地面。
[0021]
根据一个方面,传感器(6)和安全阀(10)安装在附接装置(5)上。因此,基本模块本身仍然是非常简单的机械部件。所有的复杂性都由附接装置产生。实际上,附接装置可以承担水密性功能,对两个相邻模块进行错位补偿,最后用作感测应力和/或其它参数所需的实体以及打开安全阀排水的致动器。
[0022]
根据一个方面,提供优选地布置在可移除地插入到附接装置中的传感器模块(60)上的一个或多个传感器。作为选项,可根据操作需要/要求选择性地安装传感器模块。另外,使用传感器模块,可独立于保护模块的其余部分对传感器进行维修。
[0023]
根据一个方面,模块可包括:
[0024]-底座(3),其适于将模块(2)锚定或压至地面;以及
[0025]-壁(4),其形成拦挡部件且从底座(3)基本上沿竖直方向延伸,并且适于将液体拦挡在保护屏障的前侧。因此,底座和壁中的每一个可以针对其自身功能进行优化,分别针对底座(即,容纳水并提供与地面的良好接触)且进一步针对壁(即,有效拦挡水)。底座和壁可以通过可移除方式附接到彼此。
[0026]
根据一个方面,传感器(6)感测液体主体的高度。关于模块拦挡的液体高度的信息可以是触发打开安全阀的一个重要参数。
[0027]
根据一个方面,传感器(6)感测表示模块的移动的加速度。关于模块滑动(或滑动开始)的信息可以是触发打开安全阀以保护/保留屏障的一个相关参数。
[0028]
根据一个方面,模块包括地理定位装置,例如gps传感器/接收器。由此,无论模块彼此的附接顺序如何,都可以准确地知道每个模块的位置。准确的地理位置可以传输到相邻模块和/或远程服务器。由此,从远程服务器的角度来看,包括多个模块的保护屏障的构造可以从所述多个模块相应的特定地理位置重构。
[0029]
根据一个方面,提供两个安全阀,一个安全阀布置在另一个安全阀之上。因此,有可能通过打开一个安全阀或另一个安全阀或两个安全阀来调节由模块拦挡的液体的排放。例如,通过打开上部阀而不打开下部阀,液体的排放将只涉及被拦挡液体的上部部分。通过打开两个阀,排放流量达到最大。
[0030]
本技术还涉及一种系统,所推广的系统包括:
[0031]-如上文所定义的多个模块(2);以及
[0032]-一个或多个计算机(7、15),其连接到模块(2)的传感器(6),所述计算机适于从传感器(6)接收信息,并输出预期打开一个或多个模块(2)的安全阀(10)的致动信号。
[0033]
关于所述一个或多个计算机,在模块级提供配置成从多个传感器收集各种参数的本地控制单元(7),且另外提供配置成接收由与模块相关联的各种传感器和本地控制单元收集的数据的远程服务器(15)。
[0034]
根据一个方面,可提供负责从多个本地传感器收集值参数的本地控制单元(7);此
类本地控制单元可以根据打开或关闭本地安全阀的基本决策规则做出本地决定。
[0035]
根据一个方面,可另外提供远程服务器。此类远程服务器接收来自大多数或所有拦挡模块的大量数据。远程服务器可以基于大量参数作出决定。远程服务器可以制定打开或关闭各种安全阀的简单的或更复杂的策略,并由本地控制单元实施。
[0036]
根据一个方面,由模块的多个传感器(6)传送的数据经由例如lora
tm
或sigfox
tm
的低功耗无线网络传输到远程服务器。
[0037]
根据一个方面,由模块的多个传感器(6)传送的数据经由例如bluetooth
tm
或zigbee
tm
的短程无线网络传输到远程服务器。
[0038]
根据一个方面,每个模块包括地理定位装置,其中每个模块的当前地理位置被发送到远程计算机,并且所述远程计算机配置成将每个模块的地理位置与关于液体主体液位和加速度数据的信息聚合,并且配置成从中构建保护屏障的当前状态的综合图像。可向负责监控保护屏障整体性能的人类管理人员提供压缩图显示。
[0039]
本技术还涉及一种方法,所推广的方法由用于控制包括如上文所定义的多个模块(2)的保护屏障(1)的方法定义,有利地实时包括至少以下步骤:
[0040]-用一个或多个传感器(6)获取关于保护屏障(1)或被拦挡液体的信息;
[0041]-处理所述信息以确定保护屏障(1)是否可能因液体压力而破裂,
[0042]-作出打开一个或多个安全阀的决定,
[0043]-作出关闭一个或多个安全阀的决定。
[0044]
应理解,上文所提及的决定可由负责管理保护屏障性能的人类个人作出,或替代地或另外可由计算机根据预定义规则作出决定。
[0045]
根据一个方面,每个模块包括地理定位装置,其中每个模块的当前地理位置被发送到远程计算机,并且所述方法还包括:
[0046]-将每个模块的当前地理位置以及关于液体主体液位和加速度数据的信息发送到远程计算机,
[0047]-将每个模块的地理位置与关于液体主体液位和加速度数据的信息进行聚合,
[0048]-在远程计算机处从中构建保护屏障的当前状态的综合图像。
[0049]
借助于此类地理位置的“图片”,可以提高决定的相关性,安全阀应该打开的位置可以更有效地保障保护屏障和/或管理屏障下游和沿线的液体流量。
[0050]
根据一个方面,每当液体主体的高度超过第一预定阈值(hl)或在模块处经历的加速度超过第二预定阈值(al)时,发出打开安全阀的致动信号。这表示可由保护屏障承受的应力极限的示例。
附图说明
[0051]
本发明的其它特征和优点从以下通过非限制性示例并参考附图给出的对其一些实施例的详细描述中呈现,在附图中:
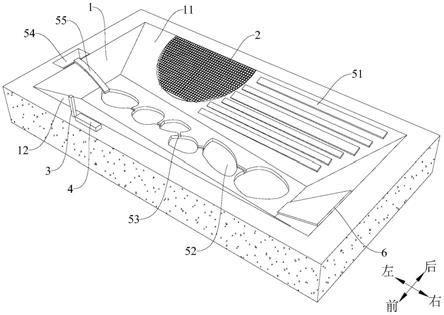
[0052]-图1示出根据本技术的实施例的包括数个模块的保护屏障的示意性后透视图,
[0053]-图2示出本技术模块的侧立面截面图,
[0054]-图3a和3b分别以图解方式示出以堆装配置组装之前和以堆装配置组装之后模块的侧截面图,
[0055]-图4示出本技术模块的前立面图,
[0056]-图5a和5b分别以图解方式示出排空配置和填充溢流液体之后模块的侧截面图,
[0057]-图6以图解方式示出三个组件中的模块,
[0058]-图7以图解方式示出呈堆装配置的两个模块,其中一个布置在另一个顶上以优化存储容积,
[0059]-图8示出功能框图示意图,其图解说明获得关于保护屏障的信息的系统视图,
[0060]-图9示出具有安全阀和传感器模块的一个实施例中的模块的后视图,
[0061]-图10示出包括两个安全阀的附接装置的侧视图,
[0062]-图11示出包括两个安全阀的图10附接装置的前视图,
[0063]-图12示出传感器模块的示例的视图,
[0064]-图13至15示出变型实施例,图13示出堆装配置,图14和15示出工作配置,
[0065]-图16示出浮子/连杆机构系统的控制件的细节,
[0066]-图17单独地示出拦挡板,
[0067]-图18示出从下方看的浮子/连杆机构系统的示例,
[0068]-图19示出进气阀的详细截面图,
[0069]-图20示出进气口区域拦挡板中的孔的详细视图。
具体实施方式
[0070]
在图中,相同参考表示相同或类似的元件,除非另外说明。为清楚起见,一些元件可能有意不按比例表示。
[0071]
系统概述和模块
[0072]
现在参考[图1],其示出保护屏障1。
[0073]
保护屏障1适于拦挡非气态液体,以防止保护屏障1一侧的任何径流或溢流。
[0074]
所谓“非气态液体”,应理解为基本上液体,例如水、污泥之类的或多或少粘性的液体,或工业液体,以下称为液体。
[0075]
保护屏障1可用于多种情况以保护特定区域、建筑物等。
[0076]
在紧急情况下,可以有利地临时安装保护屏障1。
[0077]
保护屏障1可以根据不同的配置进行安装,这可取决于其具体用途。
[0078]
[图1]描述保护屏障1的部分透视图,所述保护屏障沿着主方向x延伸以防止位于或到达表示为a的前部区域的液体进入位于保护屏障1相对侧的表示为b的后部区域。
[0079]
还定义了垂直于主方向x的横向方向y。液体压力主要沿横向轴线y施加。否则,沿轴线x的保护屏障1将区域a与区域b分开。
[0080]
安装保护屏障1的地面基本上平行于包括主方向x和横向方向y的平面延伸。
[0081]
其它配置也是可行的,例如保护屏障1的弯曲或环形实施方案,以允许引导或临时存储液体。地面可以不是平面。
[0082]
因此,模块组件中提供两个或更多个自由度以遵循地面和期望的保护屏障整体形状。
[0083]
保护屏障1包括多个模块2。模块2彼此独立,但可以组装在一起形成保护屏障。
[0084]
一般来说,优选地,模块的大小和重量适合单人操作。实际上,模块2(在不含水的
状态下)的重量小于30kg,优选地小于25kg,稍后将给出更多细节。
[0085]
每个模块2包括至少底座3和壁4。
[0086]
在本文件下文中,壁4也称为“拦挡板”或“拦挡部件”4。类似地,底座3在本文件中也称为“箱”3。
[0087]
底座3适于将模块2锚定或压至地面,使得即使在液体对模块2的前侧施加压力时,模块2也可以保持在适当位置。
[0088]
根据实施例,底座3可以是在平面xy上延伸的液体填充的储罐/箱。底座3与地面接触的表面也可以具有高摩擦系数(或特定的爪布置),以避免或限制模块2在使用过程中的任何移动。
[0089]
根据另一实施例,通过使用例如柱、螺钉等任何锚定构件将底座3锚定至地面。
[0090]
底座3可以是具有矩形或方形基底的平行六面体,但任何其它形状也是可行的。
[0091]
在所示的示例中,底座形成为具有底层30、前壁3a、后壁3b、右壁3c、左壁3d的箱。在所示的示例中,在壁的外侧提供一个或多个凹槽33,其用作工作人员搬运箱的抓握构件。在所示的示例中,在后壁3b的底部提供排水塞35。
[0092]
壁4附接到底座3,并适于将液体拦挡在保护屏障1的前侧,如[图1]上的区域a所示。附接优选地是可拆卸附接配置,如稍后详细描述。
[0093]
壁4在竖直方向z上基本上从底座3延伸。另外,壁4包括通常为矩形的两个相对的面4a、4b。如[图2]所示,一个面4b适于与位于前部区域a中的液体接触。相对的面4a朝向后部区域b定位,后部区域b也称为干燥区。
[0094]
壁4的高度h4可以在60cm与120cm之间,优选地高于70cm,并且更优选地约80cm。更一般地说,壁4的高度充分足以防止任何液体从保护屏障1上方进入。
[0095]
有利地,大约80cm的高度可以拦挡大量的水,并且人们仍然可以步行或跳过屏障;因此,即使安装了此类屏障,也不会阻止人们在必要的情况下通过,因此不会危及人身安全。
[0096]
每个模块可以用hdpe(高密度聚乙烯)等强塑料材料制造。此外,每个模块可以用pvc、pp、abs或任何同等坚固且有成本效益的塑料材料制造。
[0097]
壁和底座可以分开制造,或作为替代方案以单件制造。零件可以通过模塑或旋转模塑获得。
[0098]
关于底座3,底座的重量优选地小于25kg,更优选地小于20kg。
[0099]
关于壁4,壁的重量优选地小于8kg,更优选地小于5kg。
[0100]
因此,当一组操作员安装或卸载此类模块化保护屏障时,无需使用起重机或提升构件。
[0101]
关于外形尺寸,h4表示壁4(拦挡板)在其工作位置的高度,h3表示箱3沿竖直轴线z的高度,
[0102]
l4表示壁4沿x的宽度,l3表示箱3沿x的宽度。e4表示壁4的厚度。d3表示箱3沿y的深度。
[0103]
每个模块2(保护屏障1的端部模块除外;未示出)可以液密方式组装到其它两个紧邻的模块2。
[0104]
所谓“以液密方式组装”,应理解为没有液体可以流过两个模块之间的接合处。
[0105]
[图1]描述其中一个模块2b已组装到相对侧的两个其它模块2a、2c的实施例。已组装的模块2a、2b、2c与其它模块(未示出)一起形成根据主方向x延伸的保护屏障1。
[0106]
为了允许将两个模块2彼此组装,每个模块2可以包括至少一个横向附接装置5。
[0107]
尽管优选的是两个模块之间的机械接口依赖于此类附接装置,但不排除设想其中两个模块直接附接到彼此的解决方案。
[0108]
横向附接装置5可以是柔性、刚性或铰接式元件。其对于水平部分可以包括柔性部分、弯曲部分。横向附接装置5可以由塑料制成。
[0109]
在一个实施例中,附接装置是柔性的,并且允许根据轴y在两个连续模块之间具有不同角位置。
[0110]
在一个实施例中,附接装置是柔性的,并且允许根据轴z在两个连续模块之间具有不同角位置。
[0111]
关于地面不均匀的情况,底座优选地装配有沿x轴边界延伸的密封接头27。
[0112]
横向附接装置5通常为矩形,其在竖直方向z上的长度对应于壁4的高度。
[0113]
关于外形尺寸,h5表示附接装置5在其工作位置的高度,l5表示附接装置5沿x的宽度。e5表示附接装置5沿y的厚度。
[0114]
横向附接装置5通常由柔性材料制成,因此其可变形以适应两个连续模块之间的轻微或严重偏移。两个连续模块之间的偏移可能因地面不平坦而导致,或可能因保护屏障的期望路径而导致,在某些情况下,所述期望路径不是笔直的,而是弯曲的,甚至可能包含直角转弯。两个连续模块之间的偏移也可能因安装过程中模块的定位不准确而导致。
[0115]
两个连续模块之间的偏移可以是围绕z轴的角差,也可以是围绕轴线y的角差。还可以考虑围绕轴线x的角差(沿x轴扭曲);也可以考虑轻微的平移偏移。
[0116]
横向附接装置5的侧面包括将被组装到两个邻近模块2的壁4的紧固构件。为此,横向附接装置5可以与邻近模块2的壁4互锁连接。
[0117]
横向附接装置5与拦挡壁之间的机械接口可以有数种类型。可提供滑块布置。
[0118]
在其中一个零件中,可沿z提供凹槽51,在对应零件中具有互补的突起/凸起52。
[0119]
可在附接装置或壁4任一者中提供楔形榫区段。
[0120]
通过沿竖直方向z滑动,可在拦挡壁中安装横向附接装置5。
[0121]
可在横向附接装置5中提供销,此类销配置成进入设置在拦挡壁中的相应通孔。
[0122]
销可以是蘑菇型,头部比杆大。
[0123]
可提供辅助锁定装置,作为锁定蘑菇型凸耳头部的滑块。
[0124]
可以考虑任何类型的紧密和可锁定接口,用于将横向附接装置5与拦挡壁4接合/连接。
[0125]
横向附接装置5还具有沿x轴边界延伸的密封接头28。密封接头28足够柔性,以补偿工作位置的地面不规则性。
[0126]
当通过横向附接装置5链接在一起时,模块2形成保护屏障1,所述保护屏障防止任何液体从区域a进入区域b。
[0127]
密封接头27布置在壁4的底部。替代地,密封接头27布置在箱的底部。每个密封接头27沿纵轴x后接另一个已提及的设置在横向附接装置5处的密封接头28。
[0128]
数个密封接头27、28沿纵向轴线x一个接一个布置,以便它们沿纵向轴线x一起形
成连续密封。
[0129]
传感器
[0130]
保护屏障1还包括至少一个或数个传感器6。传感器6可用于实时获得关于保护屏障1的性能或拦挡液体的特性的信息。
[0131]
所谓“实时”,应理解为立即或几乎立即,以及至少在使用保护屏障1的过程中。
[0132]
如图9所示,传感器可布置在特定传感器模块60中。传感器模块也可以称为传感器棒/传感器杆/传感器子组件。
[0133]
应注意,传感器组件不一定存在于每个附接装置5或每个模块2上。
[0134]
根据优选配置,传感器模块60可容纳在附接装置5中。然而,传感器模块也可以安装在模块2中的其它位置。
[0135]
传感器6可适于测量不同的信息。
[0136]
根据实施例,传感器6适于测量模块2的移动。
[0137]
所谓“测量移动”,应理解为传感器6可以测量模块2位移的加速度或速度。
[0138]
模块2的此类移动可沿主方向x、横向方向y和/或竖直方向z发生。沿竖直方向z的移动可与底座3移位时地面摩擦产生的振动有关。
[0139]
传感器6可测量模块2的低于20m.s2(米/平方秒)的加速度。
[0140]
根据另一实施例,传感器6适于测量施加在模块2上的压力。此类压力可对应于施加在壁4的面4b上的液体压力。
[0141]
传感器6可以相对于大气压力测量压力。为此,传感器6例如可以是差压传感器,或包括用于测量大气压力的辅助传感器。
[0142]
传感器6可测量模块2上的相对于大气压力低10kpa(千帕)的压力。
[0143]
根据另一实施例,传感器6适于根据竖直方向z测量液位hw(参考图2)。
[0144]
有数种方法可实现此目的。
[0145]
例如,如上文所描述,传感器6可以测量压力以获得关于液位hw的信息。液位hw与压力p之间的关系取决于液体体积重量。此体积重量可近似为水体积重量。为了获得一毫米的分辨率,必须获得至少10pa(帕斯卡)的压力分辨率。
[0146]
液位hw与压力之间的关系取决于液体体积高度。
[0147]
可提供两个压力传感器6a、6b,一个位于模块底部,且另一个位于沿z的预定义高度处。在传感器之间的距离已知的情况下,压差通常表示存在液体/水,并精确表示空气和液体在两个传感器之间的空间中的相应分配。
[0148]
在一个实施例中,模块2可包括地理定位装置。地理定位装置可以是gps传感器和接收器。替代地,地理定位装置可以是伽利略(galileo)或格洛纳斯(glonass)接收器。
[0149]
作为另一示例,传感器6可以是光检测与测距(lidar)模块或雷达模块。可通过比较传感器6发射和接收物理信号之间的飞行时间(tof)或发射和接收相位来计算到液位的距离。
[0150]
作为另一示例,传感器6可以是适于测量液体与空气之间的介电常数的电容式传感器。为此,传感器6包括在液体表面(未示出)附近紧靠彼此设置的多个电极。电路可以测量每个电极对之间产生的电容。
[0151]
根据另一实施例,传感器6适于测量保护屏障1旁边的液体流速。这里,速度涉及液
体沿方向x的纵向速度。
[0152]
上文针对传感器6给出的示例是示例性且非限制性的。另外,保护屏障1可包括适于测量相同或不同类型信息的一个或数个传感器6。
[0153]
如图9和12所示,传感器6可以安装到、更优选地附接到已经提到的传感器模块60,所述传感器模块又插入横向附接装置5中。传感器可以被胶合、焊接或夹持到传感器模块60上。在一个传感器出现故障的情况下,可通过仅更换故障传感器或通过更换整个传感器模块(稍后将离线维修)来进行维护,而无需拆卸保护屏障,即使其正在工作。
[0154]
浮子/连杆机构/填充
[0155]
作为另一示例,模块2可以包括浮子,所述浮子适于通过保留在液体表面而相对于模块2在竖直方向z上移动。提供进气口,所述进气口是将箱的内部区域与箱的外部区域连通的通道。进气口39、49被布置成使液体进入箱中。
[0156]
留在箱中的液体的重量连同箱坚固的下面并且在将锚定杆放入锚定孔中(见下文)的情况下一起起到锚定作用。
[0157]
提供与进气口配合的进气阀19,其可以选择性地打开进气口或关闭进气口。进气阀具有配置成与阀座接触的柱塞18和圆形主体16。阀座可以包括与环形支撑件17a对接的软平环17。
[0158]
在本技术的一个实施例中,阀经由控制机构通过布置在箱内部空间的浮子8选择性控制。
[0159]
所述控制机构形成为凸轮14和连杆机构9。
[0160]
连杆机构具有附接到浮子的第一端91,优选地轴颈附接件(轴线a8)。轴线a8处连杆机构第一端的附接件靠近浮子8的重心。
[0161]
浮子由密度低于1的材料制成,使得确保浮子8具有良好的浮力;例如,聚氨酯的膨胀泡沫。
[0162]
如图5a和5b所示。第二端92经由表示为95的轴承可旋转地附接到箱的前壁3a。与连杆机构9刚性连接的另一零件96用作推动或拉动进气阀19的活塞端部的凸轮。轴承95处的此轴颈支架围绕轴线a9平行于x。
[0163]
如图16、18、19所示,连杆机构具有凸轮14所附接到的第二端92。连杆机构的第二端92在轴线a9处可旋转地安装在进气阀19的柱塞18上。此外,可选地,如图所示,连杆机构的第二端92经由销13相对于凸轮14和进气阀19在轴线a7处旋转安装。柱塞18沿轴线a2滑动接收在布置于箱3的前壁3a中的圆柱形轴承38中。
[0164]
根据一个实施例,浮子可在底部设置有凹槽90,用于保护/引导连杆机构9。
[0165]
在所示的示例中,在壁4的侧面4a处提供两个凹槽46,并且在箱3的侧壁3c、3d的顶端提供对应的突起36。
[0166]
可以提供过滤器48,以防止固体物体进入进气阀和进气口。
[0167]
可提供一个或多个额外进气阀,例如,如图4、13、15所示,多达三个进气阀,通过一个或多个额外浮子81以控制此类额外进气阀。
[0168]
控制单元和通信
[0169]
[图8]描述包括各种传感器6a、6b、6c、6d的系统的示意图。
[0170]
传感器6适于将测量的信息发送到控制单元7。控制单元7适于与传感器6连接并存
储先前测量的信息。
[0171]
控制单元7例如是微芯片、微处理器和/或电子存储器,其中适当地安装和互连在柔性或刚性印刷电路板上,并经由有线连接可操作地连接到传感器6。控制单元7适于安装在横向附接装置5上,例如,如上文针对传感器6所描述。与任何远程布置的控制实体或计算机相比,控制单元7是“本地”控制单元。
[0172]
通信耦合器75适于将信息一旦由控制单元7处理就发送到外部装置,例如远程服务器15。通信耦合器75适于安装在横向附接装置5上,例如,如上文针对传感器6所描述。除了通信耦合器之外,还可以提供通信天线74。
[0173]
由于任何网络都能提供足够的带宽,价格低廉,并且在消耗少量能量的同时具有符合要求的通信范围,因此可以建立到远程服务器的通信链路45。以此方式,系统可以实现自主而无需连接到远程能量源。通信耦合器75可以有利地是无线通信耦合器75,例如,实施例如sigfox、lora、蓝牙网状网络、窄带iot(nb-iot)或lte-m等协议的模块。
[0174]
为了向传感器6和控制单元7提供能量,系统可进一步包括一次性或非一次性电池78。电池78可能够向传感器6、控制单元7并且在适当的情况下向存储器和通信模块供电。电池78优选地适于在不充电的情况下供电数小时。电池78适于安装在横向附接装置5上,例如,如上文针对传感器6所描述。
[0175]
鉴于上述,传感器模块60包括一个或多个传感器6、本地控制单元7、电池78和耦合器75,如图12所示。
[0176]
传感器模块60有利地安装在横向附接装置5上。以此方式,在需要更换系统的情况下,只有横向附接装置5可以从保护屏障1上拆下,并用包括一些其它类型的传感器6的其它横向附接装置5替换。
[0177]
因此,保护屏障1易于调整,无需施加特定约束,也无需拆卸/组装整个保护屏障1来设置其它类型的传感器。
[0178]
然而,此实施例是非限制性的,并且传感器模块60可以位于模块2的任何其它零件上,例如模块2的底座3或壁4。
[0179]
安全阀
[0180]
如[图9]、[图10]和[图11]所示,模块2还包括安全阀10。阀10适于允许将液体从保护屏障1的前侧排放或倾卸到后侧,尤其是在保护屏障1的完整性受到威胁/可能受到危害的特定情况下。
[0181]
阀10可以定位到、更优选地附接到横向附接装置5。当保护屏障1前侧的液体过多时,此类排放阀10可尤其适用于处理液体溢出。
[0182]
替代地,阀10可以位于模块2的壁4中。
[0183]
当保护屏障1可能因液体施加的压力过高而破裂时,阀也很有用。因此,使用阀10允许控制液体的排放,而不会发生由于保护屏障1的意外破裂而在保护区b中突然溢流。
[0184]
阀10可以是任何类型,例如闸阀、提升阀、膜式阀、虹膜阀。
[0185]
具体地如[图9]和[图11]所示,横向附接装置5可以包括在竖直方向z上一个在另一个之上的两个安全阀10、101。
[0186]
每个阀10可以通过简单的或双重作用的电机11、11a进行控制,使得阀的开口12可以在打开或关闭位置交替致动,以使液体流过或不流过阀10。在关闭位置,例如盖的关闭元
件可以用液密方式放置在开口12的前方。
[0187]
本发明还涉及有利地实时控制保护屏障1的方法。
[0188]
在第一步骤,获取关于保护屏障1或关于拦挡液体的信息。
[0189]
在第二步骤,由单元控制件7或远程服务器处理此信息。
[0190]
在第三步骤,可以基于获取的信息致动安全阀10,以便将一些液体从保护屏障的一侧排放到另一侧。
[0191]
更具体地,如果信息显示存在保护屏障可能无法抵抗的风险(因为液位施加的液体压力过高,使得保护屏障可能破裂),则阀10会被致动至处于打开位置。
[0192]
在一个具体实施例中,远程计算机15耦合到超过50个传感器,保护屏障的长度可长达超过500米。
[0193]
用于控制保护屏障1的方法有利地实时包括至少以下步骤:
[0194]-用一个或多个传感器6获取关于保护屏障或被拦挡液体的信息;
[0195]-处理所述信息以确定保护屏障是否可能因液体压力而破裂,或者是否需要排放一些液体以平衡下游流量,
[0196]-作出打开一个或多个安全阀的决定,
[0197]-作出关闭一个或多个安全阀的决定。
[0198]
应理解,上文所提及的决定可由负责管理保护屏障性能的人类个人作出,或替代地或另外可由计算机根据预定义规则作出决定。
[0199]
根据一个方面,每个模块包括地理定位装置,其中每个模块的当前地理位置被发送到远程计算机,并且所述方法还包括:
[0200]-将每个模块的当前地理位置以及关于液体主体液位和加速度数据的信息发送到远程计算机,
[0201]-将每个模块的地理位置与关于所述液体主体液位和所述加速度数据的信息进行聚合,
[0202]-在所述远程计算机处从中构建所述保护屏障的当前状态的综合图像。
[0203]
借助于此类地理位置的“图片”,可以提高决定的相关性,安全阀应该打开的位置可以更有效地保障保护屏障和/或管理屏障下游和沿线的液体流量。
[0204]
根据一个方面,每当液体主体的高度超过第一预定阈值(hl)或在模块处经历的加速度超过第二预定阈值(al)时,发出打开安全阀的致动信号。这表示可由保护屏障承受的应力极限的示例。
[0205]
壁/底座耦合
[0206]
根据具体图2、3a、3b所示的一个方面,针对拦挡板相对于箱的相应组装提供两种主要配置。首先,提供用于拦挡板的工作位置,其中拦挡板配置成在箱的前部部分可拆卸地附接到箱,以便将液体主体拦挡在保护屏障的前部区域。
[0207]
因此,拦挡板的基准面p基本上竖直布置,并且适于将液体拦挡在保护屏障的前侧a。
[0208]
其次,提供堆装位置,在所述位置,拦挡板的基准面基本上水平布置(表示为p'),并且拦挡板在背部/后部部分可拆卸地固定/附接到箱。
[0209]
更准确地说,如图14所示,在拦挡板上提供左卡扣配合突起和右卡扣配合突起41、
41a、41b,每个卡扣配合突起配置成分别接收在布置于箱3中的至少一个左固定凹槽42和至少一个右固定凹槽43中。
[0210]
表示为42、42a、42b的左右固定凹槽用于工作位置,而表示为43、43a、43b的左右固定凹槽用于堆装位置。
[0211]
左右卡扣配合突起中的每一个形成为至少一个弹性舌片41a。
[0212]
为了优化相应大小与堆装能力,可考虑拦挡板的高度h4基本上等于箱的横向长度d3。出于同样的目的,可考虑拦挡板的宽度l4基本上等于箱的宽度l3。
[0213]
我们注意到,在箱的后部部分34处,箱的后部部分是倾斜的。当屏障呈现曲率中心位于后侧中(干燥区b)的整体曲率时,这是有益的。
[0214]
根据一个实施例,在箱中提供配置成接收锚定杆73的两个竖直孔37。屏障的环境操作可能需要将部分或所有模块以机械方式锚定到地面。在这种情况下,操作员可以将锚定杆73插入竖直孔37中的一个,并将锚定杆73向下击入地面。孔37的内部区域相对于箱的其余部分是液密的。
[0215]
根据另一实施例,进气阀19不是由浮子布置控制,而是由可从远程服务器远程控制的致动器控制。致动器可以是伺服电机、电磁阀或可以选择性打开或关闭进气阀的任何装置。
[0216]
借助于此预配,预期能控制每个模块2的箱3的填充。另外,借助液位传感器6a、6b,本地控制单元7或远程服务器15可以知道在每个箱中液体填充的液位。由此,结合来自传感器6的数据,一个或多个计算机(7和/或15)可以使进气阀打开或使进气阀关闭。远程服务器15可以根据保护屏障的整体性能以及锚定需求作出决定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。