在不植入硬件的情况下建立颈椎稳定的装置及方法
1.相关申请案的交叉参考
2.本专利申请案的公开内容涉及2017年7月11日申请的美国专利申请案15/646,615的公开内容,所述案的全部内容以引用的方式并入本文中。
背景技术:
3.古代医生首次认识到颈椎是人类病理重要部位的历史节点在时间的迷雾中已不可考。史密斯纸草文稿(smith papyrus)展现埃及医生在中央王国周期期间意识到颈部的病理,且证据表明此文件可已自来甚至更早的文明的医生的作品复制。
4.如今,颈椎疼痛及相关症状是患者访问健康照护提供者的最普遍原因之一以及用于脊柱选择性手术的最普遍部位中的一者。另外,这些非常频繁地是机动车辆事故及其他国内i平民创伤之后的主要申诉,且可能是所述情形中的主要诉讼原因。颈椎疼痛是与劳工创伤赔偿相关联的共同申诉以导致数十亿美元的健康照护、伤残抚恤金及丧失生产力。无法忽视此类创伤困扰军事人员及特定来说操作超音速飞机的飞行员;在此情形中,我们常说对于此类飞行员,其“仅是时间问题”直到其经历cs-6退化。显然,在美国以及进入新千年的科技最先进国家,此是非常主要问题。
5.本论点还受以下事实支持:存在每年仅在美国执行的超过50,000个颈前路融合。主要后路程序可新增高达25,000个额外案例。此外,数百万患者遭受慢性颈部疼痛。此盛行还招致大量替代疗法于此广大患者人口传播。
6.存在针对慢性颈部i椎骨疼痛的起源的很多疗法,但更多已建立的假设是此“轴向”疼痛表示两个或两个以上椎骨之间的异常运动的元素,所谓的“微不稳定性”的综合症。另外,就此“微不稳定性”问题来说,其理论上充当脊柱融合的主要指示;如果我们相信综合症是过量运动的结果,那么显然,片段的成功融合及因此消除所有移动应解析问题。不幸地,对于尚未完全阐明的原因,此不总是解析为真。
7.为更佳理解脊柱生物动力与轴向疼痛之间的关系,科学家及研究脊柱的医生已开发称为“运动片段”的范例。此是指包括任何两个相邻椎骨连同相关联的椎间盘、小面关节、相关联的韧带、肌腱、肌肉以及神经元素的单元。
8.鉴于范例及认识到头两个颈椎的特殊解剖,可理解此范例可用于理解颈椎的病理状态。还可了解本文所公开的装置可如何获益于诊断以及治疗观点两者。此可由审查已用于颈椎中的脊柱仪器使用进一步增强。
9.增强颈椎融合手术的仪器使用已在过去三十年急剧演进。足够令人感兴趣地是,颈椎的治疗的仪器使用由哈德拉(hadra)在1891年引入,该年其将c6的棘突连接到c7;然而,尽管哈德拉未使用融合移植来互补于仪器使用,但据报告,此程序极度成功。稍后,其(哈德拉)引入用于治疗博特氏(pott's)病的此技术的修改。
10.脊柱融合性质(再次用于治疗博特氏病)由希布斯在1911年引入,且在自此之后的世纪中,在美国以及整个世界,此程序已自身建立为最普遍执行的选择性手术中的一者。尽管最初引入希布斯程序用于治疗腰椎,但最终,还对于颈椎引入融合。
11.到1942年,融合与脊柱后路仪器使用的组合演进。该年,罗杰斯(rogers)引入通过目标棘突中的钻孔传递线及使用来自髂骨棱的骨移植物补充线的技术。此技术由怀特希尔(whitehill)、本泽尔(benzel)及其他人进一步修改。
12.波尔曼(bohlman)引入借此不仅棘突联机而来自髂骨棱的长形骨移植物也联机的技术。小面固定在1977年首先由卡拉汉(callahan)引入,提出可通过通过其的小面及线钻探的孔最终稳定构造。此大幅用于腰椎,尽管报告一些颈部小面融合情况。
13.在1983年,卡荷尔(cahill)引入实际上组合先前技术与小面布线的卡拉汉教示的变型。依据由哈德拉描述的古典技术,卡荷尔在目标运动片段的尾椎的棘突周围传递线。这些线的其他端通过通过侧片钻探的孔,如由卡拉汉所描述。
14.在其在1950年代开始的里程碑式工作中,哈林顿(harrington)提出一种在椎叶的边缘下传递且接着来自长杆的钩的系统。主要引入此系统以校正脊柱侧凸曲率,但负责引入包含颈椎的亚椎叶钩。本文所公开的发明过程利用类似于由哈林顿教示的钩方法的亚椎叶组件。
15.用于后路稳定的另一方法在1980年代中期由哈里法克斯(halifax)大学的外科医生引入以教示一对弯曲金属板可在目标运动片段的颅椎的椎叶的上边缘周围传递,其中一对“镜像”弯曲板安置于尾椎的椎叶的下边缘周围。这些板的后端经配置以由螺丝彼此固定,其还提供板对骨的充分压缩。尽管此技术在实践中得到短暂普及,但在此点很少使用,且基本上仅具有历史意义。
16.侧片螺丝由在1980年代早期由罗伊-卡米尔(roy-camille)引入,且表面上以一种或另一种形式在2015年变成颈后路稳定方法选择。已引入允许后颈稳定、颈胸部稳定及甚至后颈胸系统的瓦卢斯(varlous)系统。此手术需要广泛曝光且无法使用最小侵入式技术执行;此类mis技术因很多原因(尤其是减少并发症、较短住院周期及手术后疼痛管理的减少需要)而在如今的健康照护环境中已变得越来越期望。另外,需要螺丝的极精确位置以使螺丝准确、有效以及最小化对神经根或脊椎动脉的显著创伤的机会。后者较少但是极其严重的并发症且已知导致脊椎动脉切割、中风及甚至脊髓的梗塞。
17.因此及对于所有前述原因,非常需要可利用最小侵入式程序稳定颈椎且不侵害皮质骨或引起对骨膜的实质创伤的装置。此很重要,因为很多最近研究已展现骨的创伤或环形纤维化可加速退化过程。此装置将通过推论及暗示不仅在植入方面完全可逆还对无目标运动片段的解剖及功能实质影响。如本文所提供,此装置将是独特、有用、新颖及不明显。
技术实现要素:
18.本书面描述使用实例公开本发明,其包含最佳模式且还使所属领域的技术人员能够实践本发明(包含制造及使用任何装置或系统及执行任何并入方法)。本发明的可专利范围当前由本发明的描述界定且将由技术方案进一步界定。
19.本发明的主要目的是提供独特、有用、新颖及不明显装置及装置借此稳定目标颈椎运动片段的下后方以固定片段的使用方法。此装置应在下文称为颈部微创系统(cmis),因为其经设计以使用微创外科技术植入。
20.在优选实施例中,cmis应由外科级钛制造。替代地,此cmis可由外科级不锈钢或任何金属(包含(但不限于)钴、镍、铬、钼)的合金或其他材料(包含镍钛合金、碳纤维、聚酯或
聚酰胺、陶瓷、peek)、有机材料(例如骨)或任何其他已知或被证明本技术可接受的材料制造。
21.优选实施例包括依序固定到一或多个颈目标运动片段的侧椎叶的锚;接着,连接元件使这些锚彼此耦合以稳定构造及消除任何微运动。在优选实施例及所有替代实施例中,这些构造通常将双侧固定。另外,在所有实施例中,目标运动片段的头尾尺寸可通过沿连接元件应用分散或压缩来调整。
22.在优选实施例中,这些椎叶锚固定到侧椎叶的内部或尾下面。如以下“附图说明”节中所审查,这些椎叶锚由亚椎叶颚夹及背侧颚夹构成。所述亚椎叶颚夹具有薄板状前端,其经设计以暗藏于目标椎叶下方、黄韧带背侧及占据最小空间以不威胁脊髓或其他小管内神经结构。所述背侧颚夹抵靠所述目标椎叶的下后方。这些颚夹不可逆地耦合到定位于所述锚的后端处的轮轴,其正交于所述锚的长轴;作为此耦合到所述轮轴的间接结果,所述颚夹有效地彼此耦合。此轮轴是朝向彼此牵引所述颚夹因此固定到所述椎叶的致动器的部分。类似地,如果期望移除,那么可释放所述颚夹,且所述锚从骨移除。
23.这些颚夹的配置是基本上半卵形,如从侧面观察;另外,每一颚夹的前端可具有经配置以不穿透皮质骨而仅提供对于目标骨表面增加摩擦的小、非尖齿的有限阵列。一旦所述颚夹在适当位置,是紧含于所述锚的后端处的关节连接机构内的固定螺丝。此充当迫使所述两个颚夹朝向彼此的致动器。接着,使用连接元件将所述致动器彼此耦合。在优选实施例中,引起所述颚夹牵引在一起的所述固定螺丝具有:前端,其通过前颚夹;轴,其桥接两个颚夹;及后端,其由外科医生致动。所述最后端具有接着与水平杆连续的垂直延伸部。
24.在优选实施例中,所述连接元件是其中所述前端具有又具有中心长形孔径的平坦区域的杆状实施例。所述前端与中心轴状部分连续,其又与具有固定到所述背侧颚夹的鞍部的后端连续。在优选及其他实施例中,所述连接元件的所述前端安置于所述颅骨锚的所述螺丝的所述后端上的此水平杆上。连接元件(主要是连接元件的前端处的中心孔径的长形配置)的配置允许目标运动片段的分散或压缩。
附图说明
25.本发明的详细描述可通过参考特定实施例进行,使得可理解本发明的特征,一些实施例说明于附图中。然而,应注意图式仅说明本发明的特定实施例,且因此不被视为限制其范围,因为本发明的范围涵盖其他同样有效实施例。图式未必按比例;一般强调说明本发明的特定实施例的特征。在图式中,相同元件符号用于指示各种视图中的相同部分。因此,对于本发明的进一步理解,连同图式阅读时,可参考以下详细描述,其中:
26.图1展示骨性颈椎的前视图。
27.图2是骨性颈椎的右侧视图。
28.图3展示骨性颈椎的后视图。
29.图4揭示典型颈椎的横轴(俯视)图。
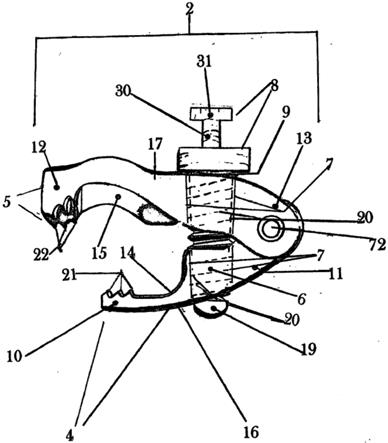
30.图5是隔离椎叶锚的侧视图。
31.图6展现具有位于左c5椎叶上的椎叶锚的脊柱的剖视/半切图。
32.图7展示将椎叶锚耦合到另一椎叶锚的连接元件的正视图。
33.图8是其中杆状连接元件将颅骨椎叶锚耦合到尾锚的cmis的优选实施例的侧视
图。
34.图9a/b展现助于外科医生确定切口部位的优选及替代模板。
35.图10描绘展示用于选择切口部位的优选方法的后透视图。
36.图11说明抵靠后椎叶的定位针。
37.图12a/b/c包含用于产生皮肤切口的仪器的前视图、侧视图及正视图。
38.图13a到e展现解剖后颈肌的仪器的各种视图。
39.图14a/b检查使包括目标运动片段的椎骨彼此分散的装置的正视图及分解图。
40.图15是将图14a及b中的分散装置插入适当位置的仪器的正视图。
41.图16a到e展示经放置及接着扩展以实现所要效应的病理及干扰装置。
42.图17a到h显示用于促进植入cmis的收缩系统。
43.图18a/b描绘制备椎叶以接纳锚的仪器的侧视图及解剖自由的黄韧带的侧剖视图。
44.图19是植入仪器的正视图。
45.图20展示植入仪器的分解图。
46.图21说明所植入的颅骨椎叶锚。
47.图22a/b展现所植入的尾椎叶锚及固定到颅骨锚的连接元件。
48.图23是展示连接两个相邻椎叶锚及稳定目标运动片段的cmis的优选实施例的后视图。
49.图24揭示后视图中所展示的横跨三个椎骨的两层构造。
50.图25展示耦合到锚中的每一者因此稳定系统的连接元件的替代实施例。
51.图26是将连接元件耦合到椎叶锚的另一替代实施例。
52.图27说明已具有容置将椎叶锚耦合到另一椎叶锚的连接元件的摇台的椎叶锚的替代实施例的正视透视图。
53.图28展现已具有摇台实施例的椎叶锚的连接元件。
54.图29描绘其中在图27到28中的替代实施例中彼此耦合的椎叶锚的构造。
55.图30a/b/c是展示其中摇台已提供到由杆耦合的锚的实施例的视图。
56.图31是连接元件及其如何耦合到锚的替代实施例。
57.图32a到d描绘图31中所见的替代系统的各种正视、分解图。
58.图33描绘图31中的替代实施例中的两个椎叶锚的耦合。
59.图34展示图31中的替代实施例的多层构造。
60.图35描绘利用杆连接元件的图31中的替代实施例的多层构造。
61.图36a说明其中连接元件的基座固定于杯内且接着旋转到适当位置以与相邻锚耦合的实施例的正视图;图36b展现图36a中所提供的替代配置的多层实施例。
62.图37是图36a、b中检查的实施例的变型的侧视图。
63.图38揭示描绘产生于锚及由独特耦合元件耦合的延伸部的替代实施例的侧视图。
64.图39a显示用于图38中所展示的变型的多层实施例中的锚的侧视图;图39b展现用于图38中所展示的变型的多层实施例中的锚的组装多头尾尺寸构造。
65.图40是具有产生于锚的螺纹延伸部及经配置以与这些延伸部耦合的连接元件的另一替代实施例的侧视图。
66.图41展示耦合多个头尾尺寸流锚的图40中的替代实施例的侧视图。
67.图42说明图40检查的实施例的另一变形的侧视图。
68.图43是利用螺纹延伸部以耦合构造的实施例的另一变形的侧视图。
69.图44a/b揭示具有非常低轮廓的替代实施例的侧视图。
70.图45展现颚夹锚定向为面对彼此的替代实施例。
具体实施方式
71.本发明涉及脊柱手术的一般领域,且具体来说,本发明涉及一种装置及借此独特、有用、新颖及不明显稳定夹双侧固定到至少两个相邻颈椎的后骨表面的使用方法,且一旦定位,连接元件双侧固定到颅骨夹及尾夹,因此消除目标运动片段的任何运动。
72.本发明的此简要描述希望根据一或多个说明性实施例仅提供文所公开的标的物的概述。预期这些说明性实施例最终将根据将使用最终将依据本技术案提交的非临时申请案公开的技术方案。提供此简要描述以以简化形式引入下文在详细描述中进一步描述的概念的说明性选择。此简要描述不希望识别标的物的关键特征或基本特征,也不希望用作为有助于确定标的物的范围。标的物不受限于解决背景中所述的任何或所有缺点的实施方案。
73.本发明可通过利用手术中荧光透视或一些其他手术中成像技术i计算机导航的微创后路方法植入以指导此手术方法。需要对这些图像的常规关注以确保识别及稳定正确目标层。
74.在实现充分麻醉(全面i区域i局部)之后,在侧目标椎叶上完成有限切口。切口的部位可随机选择;替代地,其可与图9alb及10中描述的独特模板系统指示。切口自身可使用标准解剖刀实现;替代地,下方的“描述本发明的图像的详细描述”节i特别是段落119到123中完全公开且图11及12a到c中说明独特、有用、新颖及不明显皮肤切口装置。
75.接着,独特、双边缘解剖装置用于使用沿天然平面划分肌肉。在识别目标椎叶的尾下面之后,沿其中椎叶锚的后颚夹待紧固的椎叶上的部位完成额外亚骨膜解剖。此在下文中说明于图13a到e及段落124到129中。
76.遭受退化疾病的患者中常见的是展现丧失椎间高度。此观察与本发明的相关性是此高度丧失通常导致增加椎叶的增加“挤压”,其将减少对椎叶的尾边缘的接取。
77.此可通过使目标运动片段分散而改善。由于此是后路方法,因此此通过使两个棘突彼此分散而最佳解决。此可使用标准椎叶扩张器实现。
78.替代地,脊柱运动片段牵张器提供为装置的系统的部分以植入本发明。此装置介入棘突之间且接着扩展以产生更佳手术区。此展现于图14a/b以及15及16a到d中及段落131到137中。
79.尽管利用mis方法,但仍期望最佳曝光。为此,已提供经特别设计用于颈部mis程序的mis牵开器。读者再次参考图17a到hi段落141到150关于配置的具体细节及本牵开器的使用方法。
80.接着,镀足解剖器在黄韧带与椎叶的下侧之间产生平面。引入植入仪器,所述植入仪器的前端可逆地与椎叶锚耦合。此仪器最初将颅骨椎叶锚导引到目标椎叶上以系紧固定螺丝,因此将锚固定到椎叶。此程序在尾层级重复,且连接元件的前端在颅骨锚的螺丝的后
端处的水平杆上通过。螺丝旋转近似四分之一匝以将连接元件锁定在适当位置。几乎每次,颈椎将双边稳定。本发明经设计以稳定一或多个目标颈部运动片段,其中层级使用相同技术增加以耦合额外层级。
81.替代实施例
82.我们可设想本发明的多个替代实施例;本文公开这些替代实施例的最明显实施例。所属领域的技术人员可设想及提供其他实施例;此类实施例以引用的方式包含于本发明的精神及范围内。
83.在优选实施例中,连接元件在制造时固定到所提出的尾锚的背侧下面。在第一组替代实施例中,连接元件耦合到椎叶锚的方式中存在变动。系统必须克服的挑战是锚在层级之间的无缝耦合以适应角度及由椎骨在层级之间的细微差异产生的耦合点的高度的微小变动。
84.在此替代实施例中,连接元件的后端基本上相同于前端使得还存在提供到后端的长形孔径。此可依类似于颅骨锚的方式安置于尾椎叶锚的水平杆上;接着,两个水平杆锁定连接元件的前端及后端。在任何此实施例中,分散或压缩可由于连接元件的端处的长形孔径而完成。在此实施例中,杆可在植入时“预负载”于锚中的一者上,连接元件可为添加到构造的弯曲自由及单独元件。
85.此实施例的另一变形还利用在两端上具有孔径而无水平杆的连接元件。
86.因此,在此实施例中,连接元件的端定位于两个猫的固定螺丝的头部下。由于螺丝抵靠目标椎叶致动,连接元件同时固定在适当位置。
87.可设想实施例,其中延伸部产生于[优选地]尾锚的背侧表面;此与与摇台的前端不可逆地耦合的球体/半球连续。此耦合的几何形状赋予摇台上的多轴移动,其将批判性地指定此摇台适应椎叶锚在层级之间对准的细微变异的能力。
[0088]
杆定位于具有前端、延伸轴及后端的摇台内。前端基本上相同于优选实施例中的前端,其具有含中心孔径的平坦区域。此与接着连接到后端的实心轴连续,后端略微放大使得其无法前进通过摇台。在主要i非部署位置中,连接元件经定位使得大部分杆尚未通过摇台安置。固定螺丝定位于摇台内以将杆维持在其初始位置中以及一旦部署将杆锁定在最终位置中。
[0089]
一旦两个锚固定到其相应椎叶,锚植入仪器接合杆的后端以推动杆直到前端由稳定[头]锚的配对物植入仪器捕获。接着,杆的前端中的孔径通过将孔径安置于水平杆上而固定到螺丝的后端以将构造锁定在适当位置。此实施例的变型仅提供摇台到两个摇台及稳定构造的杆。
[0090]
还可设想其他更复杂实施例。在下文所说明的一个此实施例中,存在包含不可逆地耦合到锚的背侧颚夹的背侧下面且与背侧下面连续的c夹实施例的椎叶锚的修改。此夹由螺纹螺栓或类似机构系紧以将杆固定于夹内。此杆的前端具有安置于又在[据推测颅骨]相邻层级处产生于固定螺丝的后端的螺栓背侧延伸部上的圆形孔径。对于多个层级,此实施例可通过重复本文所描述的片段耦合机构而延伸。
[0091]
此实施例的替代方案利用单个杆实施例以在每一层级处耦合到椎叶锚以预期类似于上述段落中所描述的夹的夹将用于每一层级。
[0092]
在替代实施例中,杆具有包装于带颈承窝内的球形后端以使杆具有有限运动范围
且因此允许杆适应待稳定的两个相邻椎骨之间的失准。此理想上定位于尾锚的头端,其中接纳摇台提供到颅骨锚的尾端。在主要、非部署位置中,杆引导向后;一旦两个锚固定到椎叶,杆旋转到摇台中且接着使用锁定螺栓i螺母固定在适当位置。
[0093]
另一替代实施例公开产生于沿每一椎叶锚的背侧下面的点的螺纹柱。接着,锚通过使用可在头尾方向上调整的连接杆或板状元件彼此耦合。此调整准许杆或板的长度在锁定于适当位置之前略微调整。
[0094]
可预期连接元件的又一实施例,其中延伸部产生于每一锚且尾部或颅骨引导,但仅具有足以横跨运动片段的部分的长度。在此实施例中,这些不完整桥接连接器接着耦合于两个锚之间的中部中。在此方案中,充当多层构造中的中间锚的锚将具有将在颅骨方向及尾方向两者上引导的耦合臂。
[0095]
在前述的变型中,锚各自具有杆状延伸部以及接纳组件两者以与来自另一层级的杆状延伸部耦合。应了解在此实施例中,所述杆状延伸部将颅骨引导,其中接纳组件位于锚的尾下面上。然而,其中延伸部尾引导及接纳端口的适当重新定位的布置也在本技术案的精神及范围内。显然,相同实施例的均匀应用将必需以实现所要稳定化。此实施例可更难以固定在适当位置,因为此实施例不解释层级之间的变动。
[0096]
可设想实现相同目标及目的的其他实施例且所述实施例在本发明的精神及范围内。在此实施例中,连接元件的前端及后端各自具有终接开放式配置的轴。接着,这些轴由适应椎骨之间的位置中的差异的耦合元件连接在中间。在将锚所得在适当位置之前,开放式配置在螺丝的轴周围通过,此后连接元件的端固定于锚的背侧表面与螺丝的头部之间。
[0097]
在另一变型中,提供经配置以固定到椎叶的颅骨下面以及尾下面的锚。就正式头尾尺寸而言,在此实施例中,这些锚的布置及放置的顺序有手术目的有关。因此,如果手术的目标是使(若干)目标运动片段分散,那么锚固定到头椎叶的尾下面,而其他锚固定到尾椎叶的头下面。此配置将有利于分散。
[0098]
相反地,如果外科医生授权压缩,那么将锚放置于头椎叶的颅骨下面上同时将另一锚固定到尾椎叶的尾下面将是有利配置。在这两个配置中,这些锚的耦合由前述公开内容中说明的任何数目个连接元件实现。
[0099]
可考虑上文所公开的实施例的组合。例如,配置将是在一端处具有孔径且在另一端处具有开放式实施例的连接元件。此实施例将通过孔径安置接着锁定的锚的固定螺丝;在完成螺丝的系紧之前,开放式配置定位于相邻锚的螺丝的后端下。
[0100]
当然,应理解可设想本文所呈现的所述各种实施例的组合且可能由所属领域的技术人员设想i预期。所有此类实施例及变型及自衍生物全部包含于本发明的精神及范围内。
[0101]
图式的详细描述
[0102]
如果读者具有骨解剖学及骨解剖学的各种陆标与关键软组织结构的关系的基本理解,那么将最佳理解本发明。这些图像是骨性颈椎的表示,因为本发明的目的是固定到目标椎骨。然而,此认识到关键天然及软组织结构尚未引入这些图式中且不管其排除,这些结构必须在本发明的植入过程内说明。尽管这些软组织结构(除椎间盘之外)未在本文中说明,然而,所述图将充分展现关键软组织(例如脊髓及神经)与骨解剖学的关系。当有关时,这些结构将在这些初始图中以名称指涉。
[0103]
展现于这些图像上的陆标在植入cmis中至关重要。重要的是认识到颈椎是脊柱内
的解剖异常的最普遍部位。当计划使用cmis的手术时,必须识别及考虑此类异常。必须认识到在特定例子中,一旦识别,此类异常可表示使用cmis的相对i绝对禁忌。另外,这些图像不包含肌腱、血管或神经结构,就使用此装置的指示或禁忌而言,所有结构可为至关重要。
[0104]
因此,转到图1中的骨性颈椎99的前视图,可看见按惯例命名i编号为c1到c7的7个骨或椎骨。为了说明本技术案,这些将显示对应于c1 100到c7 106的数字100到106。c1到c2 100到101复合物的独特解剖可部分在此视图中了解且结合其他视图可更完全理解。应注意不同于其他颈椎,c1不必具有扩展前椎体。此外,来自c2的延伸部椎骨,可看见齿突107(也称为齿)延伸于c1 100的前弓166上方。由此异常解剖布置产生的机构在侧视图及后视图中最佳理解且更完全阐明于以下图2及3中。另外,我们还应注意具有脊椎动脉通过其传输的c1 170的横纹孔的c1 167的双向横突。再次在图3中最佳看见此重要血管结构的进程。接着,横突167与在以下后视图i图3中最佳看见且与枕骨的髁状突关节连接以产生颅颈结(图中未展现)的上小面168连续。此视图展现颈椎的其他特征,包含c1 114到c7 120的双边侧片及c2 141、c3 142、c4 143、c5 144、c6 145及c7 146的双边横突。这些横突具有图4的横轴视图中最佳看见的沟槽,这些沟槽经配置以传输离开中枢神经系统且引导到上肢的神经根。此透视图中最佳看见的另一有关特征是椎间盘关节的前下面,其中c2到c3(不存在c1到c2盘关节)枚举为149且c6到c7空间枚举为153。盘关节明显是软组织结构但由于其提供的视觉连续性且因为这些结构因这些是退化疾病的主要部位而极其重要而包含于这些视图中。
[0105]
图2是展现解剖的额外特征的骨骼化颈椎的右侧视图。我们应想起此图像仅展现其中存在双侧对称的例子中的右侧结构。特定来说,我们应注意脊柱的曲率;此说明展示称为颈部脊柱前弯的理想曲线,其中颈椎在c1与c7之间向前弓起,其中最大偏心率的点在c4到c5处。丧失此正常曲率或甚至更严重地,脊柱向后弯曲的曲率反转(称为“驼背”的情况)是通常影响脊柱的病理学的成分,且外科医生通常将试图恢复此曲率且依此方式恢复颈椎的“平衡”。在此视图中还看见扩展前椎体,其存在于所有但是第一颈椎c1 100中。此椎骨更诗意地称为阿特拉斯(atlas)以纪念希腊神话中举起世界的主角;依模拟方式,c1举起头部的“球状物”。在胚胎阶段中,c1椎体与其骨环的其余部分分离且尾迁移以接合c2 101的顶部以变成齿突107。c2 101还且实际上更普遍称为阿克萨斯(axis)或阿特拉斯及其“乘客”头部围绕其枢转的点;齿突107主要构成骨枢轴点。此为健康个人提供颈上的头部的旋转能力。可看见椎体118到113以及棘突128到134。应进一步注意,在每一层级处,小面关节135到140表示椎骨彼此的后关节连接;应认识到,c1 168的上小面与枕骨髁状突关节连接,因此促成还广泛称为颅颈结的枕颈结(图中未说明)。应进一步理解,c7 106的内下面促成颈胸结(图中也未说明)。另外,可见横突141到146在c2到c7处前外侧突出。在论述以上图1时,已提及这些横突从在由椎骨的解剖布置产生的中央管中可见的脊髓传输颈部神经根。
[0106]
进一步的细节见于为骨性颈椎99的后视图的图3中。注意此图是非常重要,因为此图上注明用于植入cmis的相关解剖学。如上文所说明,第一颈椎c1 100及第二颈椎c2 101在其解剖配置上是独特的。此已从前透视图以及侧透视图观察及论述,且可从此角度进一步了解独特解剖学。然而,在此图像中,我们可更完全了解齿突107与c1 100的前弓166的下后方的关系。另外,我们可更佳地了解c1 100的双边上小面关节168的配置及c1的横突167内的横纹孔170的位置。对于滋润脑干及小脑的循环至关重要的脊椎动脉通过这些孔。在此
之后,动脉向后引导,且接着在通过硬脑膜及其关键颅内功能的前沿c1椎叶121的上边缘双边通过沟槽171。大棘突129及c2的椎叶122是用于确定例如颈部手术期间切口的放置的问题的重要陆标。在此视图中,颈椎c3到c7 102到106的其余部分的形态大致类似,包含棘突130到134、椎叶123到127、侧片114到120及双边小面关节135到140。我们认识到,就在继续横向及过渡到侧片114到120之前,椎叶123到127从棘突130到134的基部继续,在所述点处,椎叶123到127在a-p维度上相当倾斜,但在其侧面中较水平。应注意,在过渡点处,侧片114到120彼此悬伸(称为“挤压”,参考图14到16),其将使得最难以插入椎叶锚。因此,在植入cmis时,椎叶123到127的过渡点(例如双侧c4 124及cs 125椎叶)对于cmis 1的附接较理想。
[0107]
如俯视透视图观察,图4,“典型”颈椎(此将从c3到c6非常类似)的横轴图允许读者进一步了解相关骨形态以及其与关键软组织结构的关系。c5椎骨104说明于图4中,但所描述的陆标理解为反映c3到c6椎骨以及小修改c7的任何者的解剖。再次,为了定向,患者的正面位于页面的顶部,且背面位于底部。患者的右侧将位于观察者的右侧。扩展锥体111可概念上认识为前稳定组件。在锥体111的侧面上看见钩突158,其用于强化与定位为优于此的椎骨的关节连接。进一步横向发现横突154,其在此视图上可注明为比我们可基于其他视图了解更复杂。由双边开放箭头指示的神经孔是传输颈部神经根的管。这些产生于[所有重要]脊髓且沿横突154中的沟槽从中央管156前侧行进以离开进入邻近于脊柱的软组织中,最终促成肱神经丛。还应注意传输脊椎动脉的横突孔159。特定来说,脊椎动脉及神经根的位置使用侧片螺丝的放置使患者经受显著风险。实际上是横突复合物的组件的椎根157用于将前结构连接到后弓,因此产生中央管156。后弓包括产生经检查的椎骨的上小面关节及下小面关节的侧片118。另外,椎叶125及中线棘突132完成后弓。中央管156含有负责传输所要信息到大脑及从大脑传输所有信息且其完整性对于移动运动及很多基本功能是强制的脊髓175(此视未展示)是必须考虑将任何手术机器植入此脊柱区域中的最关键结构。另外,还必须避免对脊椎动脉或神经根的损伤,因为损伤带来基本上有害后果。此视图特别有助于展示椎叶125产生于棘突132的基部且当椎叶横向移动时最初在a-p平面中呈现相当陡峭角度。接着,当继续横向以变成侧片118时,椎叶变得更水平。用于植入椎叶锚的理想位置是位于过渡点处,因为此为从脊髓175侧。此定位是侧片略内侧,其中挤压将排除植入的可能性。此理想位置仅略小于中线与脊柱最侧边缘之间的中途,如后视图中所见。
[0108]
此审查不仅是学术练习。确切来说,准许我们更完全理解本发明的主要及其他目标且以适当角度看待本发明及其目标。已完成审查,其中界定的学术术语将用于公开内容的平衡。
[0109]
展现本发明的图式的详细描述
[0110]
根据惯例,通过研究以下详细描述结合附图的上下文最佳理解本发明,其中相同元件符号是指相同结构。还根据惯例,所说明的结构未必按比例绘制,也不可相对于此类图式开发比例的推断。本文所呈现的实施例及说明是本发明的一般表示,且还不能被解释为限制。
[0111]
因此,将注意力转到图5,其展现由最小两个主要组件组成的椎叶锚2的优选实施例的侧透视图:前或亚椎叶颚夹组件4及后或背侧颚夹组件5。每一颚夹具有在优选实施例中定位于锚2的上i颅端的自由端10、12;另外,两个颚夹耦合于位于锚2的下i尾下面的关节
端11、13处。此耦合部分由关节端的互补几何形状完成,其允许关节端11、13彼此配合。另外,铰接轴18固定两个颚夹4、5的此不可逆耦合。每一颚夹由抵靠椎叶的表面的一侧(即,亚椎叶颚夹4及背侧椎叶锚颚夹5的椎叶侧14、15)进一步特征化。另外,亚椎叶颚夹4的从右侧面向脊管本部且因此称为小管侧16,而背侧椎叶颚夹5具有肌侧17。小齿21、22沿其自由端10、12提供到椎叶侧14、15。这些齿具有经特殊设计以不穿透骨的表面而经设计以仅增加表面积且产生摩擦的圆形钝前端,因此提供较大固持。固定螺丝6充当致动器以将颚夹4、5固定到目标椎叶。在优选实施例中,螺丝6从后颚夹5的关节端13的肌侧17安置以传输通过颚夹4、5中的关节端11、13中的管道7、通过两个颚夹4、5的耦合及传输到前颚夹4的关节端11中。可看见螺丝的最前端19沿亚椎叶颚夹4的微管侧。此螺丝6的头部8定位于管道7的背侧下面的螺纹沟槽9内,其中螺纹20当然存在于整个管道7中。螺丝6的头部或后端8应注意的另一特征是来自螺丝的最下后方的整块背侧延伸部30。接着,此背侧延伸部30终接于称为锁定杆31的杆处,其与背侧延伸部30连续及与之成为整体。这些结构用于将连接元件3锁定在适当位置。
[0112]
锚2固定到如图6(半切、非中线矢状视图)中所展示的目标椎叶。前4(点状)及后5(点状)颚夹抵靠c5椎骨的示范性目标椎叶125固定。关键的是认识到前颚夹4的薄尺寸组合其相对于椎叶125的定向的略微成角度位置无限减少由亚椎叶颚夹4侵入脊管156中的机会。此由所利用的技术进一步减少,且我们可看见脊髓175[在此区域中所考虑的最关键结构]不应依任何方式干涉或受扰。在抵靠椎叶放置锚之后,系紧螺丝6以迫使颚夹4、5朝向彼此,将锚2固定到椎叶125上。此提供系统所需附接强度。应再次注意颚夹4、5上的齿21、22恰抵靠骨的表面,但不穿透皮质骨本身。还应注意前面是c5 104椎骨的锥体111。应认识到除本文所描述的优选实施例之外,其他类似实施例将明显,尤其对于所属领域的技术人员。此类实施例将包含其中锚2将固定到任何椎叶的上侧面而非下侧面(其将接着改变颚夹组件4、5的配置)的实施例。当然,所有此类实施例将在本技术案的精神及范围内。
[0113]
图7中看见耦合锚的连接元件3的正视透视图。此处可看见在优选实施例中,此元件3是整块且包括头端74、轴状中央部分76及后端77。元件3通过后端77中的锁定机构与尾锚的后颚夹耦合。此通过提供与连接元件3的最后端连续及与之成为整体的外壳机构78完成。此机构78及又连接元件自身可抵靠背侧颚夹的肌肉下面。另外,此机构78引起且与向前延伸且具有经配置以使背侧颚夹的侧并列的内表面82的夹持臂81成为整体。可移动组件79具有具体来说通过通过接着与已提供到外壳机构78的最背侧下面的腔室87连续的基本上矩形孔径84可滑动地与外壳机构78耦合的水平组件85。接着,此水平组件85与夹持臂83连续且与之成为整体,其中内表面86经配置以抵靠沿来自固定夹81的背侧颚夹的相对侧向前延伸的锚。这两个夹持臂81、83朝向彼此位移,且背侧颚夹固定于夹持臂81、83之间以将连接元件3固定到锚。接受将连接元件3锁定于锚2的颚夹5上的所要位置上的固定螺丝88的管道89位于在外壳机构78的最北侧下面。此将由颅骨锚与尾锚之间的距离确定且将连接元件3耦合到颅骨锚。此由展现平坦、在优选实施例中基本上矩形但可为任何配置且具有孔径75的独特区域的前端74的配置完成。耦合通过将孔径75安置于锁定杆31上且使螺丝旋转来完成;因此,连接元件3的前端74将同时固定而颚夹4、5固定到椎叶。
[0114]
在任选变型中,此连接元件可在其整个长度上分成两个半部以经配置以充当可使此连接元件的前端处的孔径的尺寸扩展或收缩的致动器。替代地,在实施例的任何者中,连
接元件还可由由可调节连接元件的头尾长度的单独元件耦合的颅骨及尾片段构造,因此解释此尺寸的变异。这些将在下文中说明。
[0115]
图8是cmis 1的完全组装优选实施例的后透视图。观察者的左侧是由连接元件3耦合到尾椎叶锚2a的头椎叶锚2。这些锚2、2a中的每一者由隐藏于目标椎叶的尾端下面的前颚夹4、4a特征化。前颚夹4、4a及后颚夹s、sa由轴18、18a耦合;通过系紧螺丝6、6a,迫使每一对颚夹(4、s i 4a、sa)朝向彼此,因此将椎叶固定于颚夹之间。接着,连接元件3的前端74中的孔径7s(隐含,未展示)安置于螺丝6的后端的水平杆31上。颚夹4、4a、s、sa已抵靠骨固定;然而,需要螺丝6的单个额外四分之一匝以将水平杆31(在端视为实心圆且在初始位置视为点状轮廓)定位于适当位置的水平杆31的前端74。此由水平杆31上方所见的弯曲箭头指示。连接元件3的尾端77由夹持臂81、83耦合到尾锚2a的后颚夹sa。此由接合待朝向夹持臂81位移直到这些抵靠尾锚2a的后颚夹sa牢固固定的夹持臂83的图7中所描述的外壳机构78完成。接着,部署外壳机构78的固定螺丝88以将构造锁定在适当位置。可设想替代实施例,其中将连接元件夹持到尾锚2通过使用夹持配置来完成。在另一替代实施例中,连接元件3是尾锚的组件。在此配置中,前端74必须在杆的致动之前通过安置于水平杆31上而协商到适当位置且借此将连接元件3锁定在适当位置。在本文所公开的优选及替代实施例中,如果不相同,那么最终实施例将看起来非常类似,尽管这些各种实施例的组装不同;其全部通过将椎叶锚2、2a、2b固定到目标椎叶且接着由连接元件3连接锚而稳定目标运动片段。下文指定及说明替代实施例,但应认识到这些不排他且所属领域的技术人员可设想完成这些目标及目的的其他实施例,因为可设想超出所指定的明显变型。所有此类实施例在本发明方法及装置的精神及范围内,且在本技术案的精神及范围内。
[0116]
cmis利用通过组合手术中成像及解剖理解将表面陆标与次表面结构相关而完成的微创手术(mis)方法植入。此导致精确手术切口直接位于锚将固定到其的椎叶上点上,其是其中椎叶从较陡峭部分过渡到更水平部分的点,如以上图3及4中所描述。此点是近似中线与目标椎骨的稍后几乎边缘之间的距离的40%到45%。为将锚的前颚夹隐藏到其理想位置,曝露必须不太横向或脊柱的稍后几乎下面将防止植入。确切来说,此颚夹必须通过椎叶间空间的侧面引入。切口的位置可通过使用独特、有用、新颖及不明显导引模板80预测,其优选实施例展现于图9a中。此模板80理想地是在已经完成区域的无菌制备及覆盖之后放置于手术区(俯卧患者的颈部的背面)上的三个无菌、透明、无色塑料可丢弃片90、200的群组。这些片中的每一者已使用由不透射线材料制成的可见暗线浸渍。这些组件的第一者,中线模板90是长、薄片,其中不透射线的线仅是用于指示中线的笔直i中断线201。外科医生使用荧光分析识别中线,接着使模板90的荧光镜像与棘突对准。一旦外科医生已实现此,鉴于中线标志肉眼及荧光均可见,易于看见指示中线的皮肤参考点。接着将模板80的第二组件200带入手术区。此对片具有脊柱的侧边缘的轮廓92、93以及沿内侧边缘的一组对应孔径94以可能识别用于放置定位针的理想部位。
[0117]
在展现模板的替代实施例的图9b中,单片充当模板202。再次,可见暗不透射线基椎叶已用于产生颈椎的关键解剖陆标的轮廓,如p-a荧光投影的可见。具体来说,模板包含对应于棘突91的图像,其建立关键中线陆标以及指示脊柱92(左)及93(右)的最侧边缘的一系列线。提供一系列线以调整不同患者中所见的颈部的侧面的变化大小。另外,存在对应于从左移动到右的线92、93的一系列孔径94、95、96,其用于指示导引针的位置及轨迹,及最终
切口的部位。每一侧上的使用3个线i 3组孔径的说明仅是示范性性,且可使用任何数目个此类特征。为了简单,线的数目应对于孔径的数目,但此实施例并非排他预期格式。当然,任何及所有此类实施例将在本发明的精神及范围内。
[0118]
图10是其中模板80的优选实施例在颈椎的骨解剖之后叠加的适当位置的俯卧患者的头部及颈部的视图。此表示p-a投影中的荧光镜像,且通过使中线模板90与棘突的中部对准建立中线。另外,识别横向模板200上的线92、93通过使模板200横向或内侧移动而精确地与脊柱的侧边缘对准,由开放箭头所展现。此系统将允许外科医生能够通过最佳最小切口实现理想植入。由于脊柱的大小在个人之间变动,因此脊柱相对于中线的侧边缘的位置也将改变。此关系在确定切口的(若干)部位时较为关键,如先前所公开。在替代实施例中,脊柱的侧边缘并非由单个线而由解释大小的可变性的一系列不透射线的线划界以提供外科医生侧脊柱边缘的若干可能位置及其与中线的关系。外科医生将理想地匹配中线及侧边缘的实际放射线外观与模板上的最接近外观,且接着利用与侧边缘有关的孔径;因此,如果中间线是与侧脊柱边缘最相关联的线,那么中间孔径95将是最适当孔径以接受定位针97。因为具有异常身体型态的患者可不符合由孔径预测的部位,因此外科医生在检查图像时必须确定且将切口放置为稍小于中线与侧边缘之间的半途,其将总是导致出色定位。理想切口将在与兰格(langer)线一致的水平或内外侧平面中制造。此将导致最可接受化妆效应以及最佳功能后果。然而,垂直切口当然还将可接受且与本发明方法的精神及范围一致。
[0119]
一旦已识别本部孔径,那么导引针97通过其间,且另一荧光镜像确认放置,如此侧视图中所展现。在此图中,为了说明,针97已定位于c5 125的左椎叶。针97已具有钝前端98;钝前端98的优点是如果针不完全放置及引入椎叶间空间il中,那么钝前端不可能容易穿透位于硬脑膜背侧的黄韧带,脊髓的上覆膜。显然,此钝针将不能够穿透皮肤、皮下组织sc或背侧筋膜df。因此,最初引入稍大口径的尖端针99,且深入到背侧筋膜df。此针较短以[再次]不穿透椎叶间空间。理想上,较尖锐引入针99定位为更紧密配合于钝定位针97的外部,其中外锐针99的前端202恰在筋膜df下方延伸且内钝针97延伸到骨,其中前端98已抵靠椎叶间空间il的侧边缘处的c5椎叶125的下侧或尾下面。在实施例中,除将由[不透射线]金属(例如不锈钢)构成的前端98之外,定位针97由[可透射线]硬塑料制造。仅使尖端不透射线将使前端的手术中成像可视化显著更容易。这些针97、99的两者展现于图11中。还展现钝针97的后端207以及锐针99的后端208。钝针97的后端207可逆地耦合到针97,使得移除后端207。此将允许外锐针从手术区移除,因此允许皮肤穿透装置203安置于钝针97上。
[0120]
在放置定位钝针97之后,有限水平或垂直切口居中于针上。切口可使用标准手术刀实现;替代地,提供使用目的特定于实现此目标的独特、有用、新颖及不明显装置,且描绘于图12a中的前视图中。此皮肤进入装置203具有前端204、复杂中心区域及后端,且结合钝针利用。前端204是已具有与经设定尺寸以容纳钝针的通道205(此中心通道205安置于钝针上)的孔径209的中心投影以加工切口放置于理想位置中。形成通道205的入口的圆形最前端209相当尖锐,因为此表面将形成最初切口。接着,尖锐边缘210沿形成前端204的突出的侧双边延伸,这些尖锐边缘使切口自由引入针99产生的穿刺双边延伸。接着,此切口由自中心通道205双边延伸的内侧及外侧翼206的尖锐侧211进一步扩展。此产生理想大小切口,其中相等切口产生于针道的两侧上。正视图中看见拇指托架212及手柄213。
[0121]
图12b,展现装置203的特定方面的侧视图,包含手柄213的细节及此配置如何导致
装置213的致动。我们可看见具有其尖锐前缘209的前端204、前端204的尖锐侧210以及同侧翼206的尖锐边缘211。另外,我们还了解拇指托架212及手柄213。手柄213的后端处发现指数曲线214,其在插入期间进一步稳定装置203。
[0122]
可在展示装置安置于定位针97上的图12c中的正视图中了解皮肤进入装置的致动。前端204将位于适当位置使得轮辋209将产生居中于由前端204的尖锐侧210延伸的针道周围的切口,其由装置203的翼206的尖锐侧211进一步延伸。为插入装置203,外科医生的拇指放置于拇指托架212上,其中稳定手指位于曲线内部。接着,外科医生向下推动拇指且装置将跟踪针迹及恰通过背侧筋膜的层级以曝露背侧颈肌且对于下一步骤制备手术区。在实施例中,可想象整个装置完全可弃;在另一实施例中,具有相关联的尖锐、刀状边缘的外侧翼206可弃,而中心部分是永久、可再使用实施例。
[0123]
接着,外科医生打开后颈肌且使之从目标椎叶脱离,因此曝露骨目标区域。此可以多种方式完成,且本文公开使用是目的特定肌肉分裂i分割装置的独特、有用、新颖及不明显装置。所述装置215说明于图13a到e中,且最初展现于正视图13a中的非部署位置中。装置215包括两个基本上长形主要组件,颅向组件216及尾向组件217。这些中的每一者又基于前端218、222、轴219、223及后端220、224,其中两个组件与轴221不可逆地耦合于交点处;此定位为正交于两个组件216、217的长轴。此交点产生两个组件216、217可围绕其旋转的剪形枢轴点机构。在实施例中,此耦合经弹簧负载以将装置维持在非部署位置中。
[0124]
在图13b,部署位置中的装置215的正视图中更佳看见前端218、222是从轴219、223的偏压处产生的踏板。此偏压成角度远离颅骨组件216的轴219i后端220。在手术区内的功能位置中,此将向前成角度(远离外科医生)。踏板前端218的最前缘226变窄到尖锐边缘,其在分裂肌肉椎叶及从骨分割肌肉附属物中有用。轴连接前端218与后端220。轴221依相交方式将颅骨元件216耦合到尾元件217以当组件216、217致动时产生杠杆i移动臂。后端220、224具有手指i拇指握把228、229以助于外科医生致动仪器215。
[0125]
尾组件217更佳见于图13b中且包括前端222、轴223及后端224。如在颅骨组件216中,尾组件217的前端222是从与轴223的结的偏压处产生的踏板,但在此例子中,偏压经配置使得踏板向后成角度(朝向外科医生)。由于装置215的两个组件216、217具有基本上相同长度,因此,当装置215位于非部署位置中时,两个前端218、222基本上彼此对准。尽管这两个踏板的偏压相对于轴219、223极性相反,但踏板的角度描述基本上互补,因此这些踏板218、222可部分彼此叠加,如从图13a中暗示的非部署位置中的侧透视图所见。此配置将促进最初插入肌肉纤维中。此踏板222的最前缘227再次暗示尖锐边缘227。后端还具有握把229。还应注意两个轴219、223在超出轴221的点处略微发散,使得后端220、224在非部署位置中发散,如侧透视图中所见。
[0126]
图13b中可看见装置通过使用手指i拇指握把228、229上的数字压力大体上朝向彼此操纵后端220、224来致动。此因此两个组件216、217围绕轴线枢转以迫使前端218、219远离彼此,如由实心箭头所指示。可设想围绕轴产生移动臂的前端及厚度的其他实施例,且当然在本发明的精神及范围内。
[0127]
在图13c(手术区的后视图)中,看见后颈肌纤维在头尾方向上定向。此视图展现装置215的致动。因此,非部署装置215的前端218、222被视为隐藏于这些肌肉纤维“肌肉”中的实线。由后端220、224上的手动压力部署此(由中断线产生的“虚幻”图像指示)引起轴219、
223及前端218、222变得发散以沿解剖平面解剖纤维。此扩张组织而非切割组织以使流血及对组织的损害最小化,同时曝露上椎叶及下椎叶的目标骨表面。棘突sp划界中线。稍后几乎椎叶的“挤压”描绘为sh。
[0128]
图13d(展示部署装置215的后视图)是用于了解前端218、222(由开放箭头指示)的并排清扫动作的最佳有利观点导致自已在此说明中标记的背侧椎叶的附属物剥离肌肉i骨膜。如果显著软组织保留,那么此步骤由于椎叶锚不易固定到椎叶而属关键。然而,前端218、222相对于轴219、223的角度的优点最佳见于由图13e提供的侧视图中,其中可看见由于这些结构沿其头尾轴线向后成角度,因此这些角度基本上模仿椎叶的角度。因此,前端218、222可制备相邻椎叶以接纳锚。
[0129]
在此点处,评估可展示椎叶间空间可由上覆另一椎叶的椎叶的“挤压”大幅减小。此可显著延迟依防止损伤方式植入cmis的能力;外科医生可选择分散目标运动片段以减少挤压效应且更清楚地展现椎骨的[目标]尾边缘。
[0130]
当然,此可由包含标准椎叶牵张器的若干不同机构完成。然而,本技术案中还公开独特、有用、新颖及不明显椎骨牵张器。此装置290包括颅骨片段291及尾片段292,如正视图图14a中所展现及分解图图14b中进一步说明。每一片段具有前端及后端;颅骨片段291的前端293是经设计以抵靠颅骨棘突的尾下面的基部的扩展配置。颅骨片段291的后端294是经设计以安置于尾片段292的前端296中的通道298内的基本上活塞状;此后端294具有经设计以抵靠通道298内的波纹297的波纹295。此由指示此耦合的虚线暗示。这些[波纹]产生棘轮机构,其经设计以在定位于椎骨之间期间维持分散装置290的位置。尾片段292的后端具有经配置以抵靠尾棘突的基部的两个突出299、300。后端的突出299、300弯曲i引导稍向后以在最终位置之后更佳接合尾椎的目标区域。图14b中的分解图更佳展现由波纹产生的棘轮机构。
[0131]
图15是定位牵张器装置290的仪器301的正视图。此经设计使得在mis程序期间牵张器290可从一侧进路定位。
[0132]
从图15中的正视透视图观察,仪器301具有基本上s形形状,且包含前端302、中心轴部分303及后端304。仪器301的致动器是包括主动臂312及不动臂311的后端304。主动臂312与中心轴303的可旋转外部分310连续,接着与前端302的主动臂306连续。类似地,后端304的不动臂311与与不动臂305连续的不动中心轴309连续。主动臂306具有可逆地与颅骨片段耦合的多个这样的延伸部308;不动臂304还具有稳定后端的多个延伸部307。
[0133]
抵靠不动臂311压缩后端304的主动臂312使此致动平移到中心轴303的螺旋可旋转组件310,其具有与不动轴309的张力关系。此引起前端302的主动臂306从不动305(笔直箭头)臂分散。牵张器290负载到这些壁306、305上,且部署及定位。可任选地利用弹簧负载机构。由于牵张器290的部署,因此存在导致棘间空间的放大的运动片段的分散。
[0134]
图16a i b是展示示范性性运动片段的正常(16a)及病理(16b)后元件的正视图。最重要特征是图16a中所见的[正常]椎叶间空间il,其明确提供对颅骨椎叶的下边缘的侧面的手术接取。使用相同视图,图16b展现患病片段的外观,其中大幅减小椎叶间空间il源自“挤压”效应sh;此大幅减少对下椎叶边缘的接取以妨碍cmis的放置。此装置的目的将是分散运动片段的椎骨以恢复i重新打开il及使理想放置可行。
[0135]
图16c说明牵张器290的应用于受“挤压”sh影响的示范性性运动片段及减小椎叶
间空间il。牵张器290的颅骨片段291使用仪器301的移动臂306稳定而不动臂305稳定尾片段292。仪器301i牵张器290复合物的前端302通过最初使其椎骨表面定位为抵靠尾棘突的颅骨下面。仪器301从一侧进路通过且旋转以沿曲线路径(未展示)头侧安置仪器301i牵张器290直到颅骨片段291的扩展前端293抵靠上棘突(开放箭头的点状轮廓)且尾片段292抵靠下棘突。仪器301的部署迫使扩展前端293牢牢按压脑棘突而突出299、300抵靠下棘突。
[0136]
装置290的插入及扩展导致运动片段的分散,如图16d中所见。鲜明地可见前端293定位为抵靠脑棘突的后中段(虚线)。看见尾片段292的突299、300定位为抵靠尾棘突的侧。随着椎叶边缘le的曝露,椎叶间空间il现宽了若干毫米以促进cmis的植入。在cmis双边位于最终位置中之后,移除牵张器290。图16e展示其中颅骨片段291具有分叉端的装置290a的替代实施例以展现固定于脑棘突周围的突出293x i 293y。尾片段292基本上相同于标准实施例中所见的尾片段。
[0137]
尽管此程序利用“微创手术”(mis)技术,但期望曝露锚将固定到其的椎叶的有限区域。此曝露可使用标准牵开器系统(包含经设计用于mis脊柱程序的套管系统)实现。这些包含在包含美国专利8,602,982的多个专利中由迈尔斯(miles)教示以及由迪波托(dipoto)、史密斯(smith)、福利(foley)a及其他人教示的技术。
[0138]
在试图实现此收缩的需要及目标时,很多先前技术存在问题。us 5,954,635及其他中由福利及史密斯教示的套管系统的主要关注是当前可用的手术接取套管的配置基本上全部是圆形。然而,此手术程序的主轴在头尾方向上;这些套管特定来说内外位地接合比必需较大的手术区。mis套管接取系统(例如由迪波托(dipoto)等人在us 7,766,930中教示)可扩展,且理论上可经配置到手术区的轴线,但一般将太大而无法与cmis一起使用。相同情况适用于由马修斯(matthews)等人在us 6,206,826中教示的技术。
[0139]
收缩/获得手术曝露的另一关注是椎叶的内侧面的[陡]角,因为角与棘突的基部连续。此可相当尖锐使得一些牵开器系统可以此角度旋转。
[0140]
此方案的理想牵开器是适应内侧椎叶角度、选择性地提供头尾曝露、最初定位于折叠实施例中且接着扩展仅足以曝露目标区域的牵开器系统。另外,理想牵开器由基本上可透射线的硬塑料或其他物质制造以不对成像产生假影。当然,易用性是先决条件。
[0141]
为此,本文公开独特、有用、新颖及不明显牵开器系统230。此展现于展示系统包括内侧叶片231及外侧叶片232的图17a中的侧视图中;这些连接到颅骨关节复合物233及尾关节复合物234。这些又包括可逆地耦合到中心轴向销237的[颅骨]内侧238及外侧239枢转叶片以及再次可逆地与中心轴向销255耦合的[尾]内侧248及外侧249枢转叶片。关键地,内侧叶片231是包括主叶片235及可收缩到主叶片235中的次叶片236的复杂结构;此特征的优点将在以下图17h中阐明。波纹262促成下文在图17f、17g中描述的机构,一旦放置于适当位置,机构将牵开器及叶片锁定在适当位置。在内侧叶片及外侧叶片的基部处,可任选地提供与肌肉介接且维持牵开器的位置的一系列小踏板260、283。
[0142]
此牵开器的部署由主要(图17b)及部署位置(图17c)中的装置的俯视图最佳了解。如将由外科医生看见,牵开器230最初定位于主要i折叠i非部署位置中使得颅骨233及尾234关节复合物完全折叠,托架246、254、267及271定位为靠近彼此接近的内侧231及外侧232牵开器叶片的中间。此配置允许牵开器230隐藏于已分裂为每段落124到129及图13a到e的肌肉纤维mf之间。接着,牵开器230部署i敞开以通过致动关节复合物233、234如图17c中
最大化曝露,其引起颅骨238、239及尾248、249枢转叶片重新定位(由实心箭头指示)。此又迫使内侧231及外侧232叶片变得发散且产生必需曝露。我们应注意椎叶间空间il及椎叶边缘le在手术区中;由于两个尾椎叶边缘曝露,因此此将适应单层cmis的放置。
[0143]
图17d是颅骨内侧叶片238的正视图,示范性关节复合物233、234的叶片及进一步说明其功能。此处应注意此整块结构具有前端、扩展中心叶片状片段及后端。前端具有与可逆地与来自内侧叶片的延伸部耦合的圆形柱243连续的延伸部242,此耦合产生显现牵开器可在内外位平面中重新定位的机构。叶片维持收缩软组织的位置。后端具有具有容纳销以组装颅骨关节复合物233的中心孔径241的圆形延伸部240。
[0144]
图17e中所说明的颅骨关节复合物233包括中心轴向销237,其通过使销237通过内侧及外侧枢转叶片238、239的后端处的延伸部240、269中的孔径而可逆地、可旋转地耦合到叶片238、239。来自这些叶片的前端的延伸部242、250终接于将可逆地与内侧及外侧叶片231、232的组件耦合的圆形柱243、251中,此耦合对于牵开器的移动性至关重要。
[0145]
尾关节复合物234是颅骨复合物的镜像;此展现于图17f中的分解图中。内侧248及外侧249枢转叶片分别包含具有中心轴向销255通过其安置(由黑色箭头所指示)的孔径257及262的多个延伸部256及261来与这些叶片耦合以允许围绕此销旋转。另外,当不再通过移除此销而需要时,牵开器可拆卸,其接着释放叶片且准许快速移除组件。叶片248、249的前端上的延伸部258、263与与内侧及外侧叶片耦合的圆形柱259、264连续。
[0146]
可滑动、棘轮机构对于牵开器的部署至关重要。图17g(主叶片255的头侧半部的内表面的侧视图)中审查此机构的实例。我们应注意具有一系列波纹284的水平定向管道247。在此实例中,此管道247是笔直,此几何形状由来自叶片表面的整块延伸部288完成。可滑动元件是不可逆地由上边缘285及下边缘286耦合到管道247的[颅骨]托架246。此特征在沿管道247的进程的头尾方向上促进托架246的移动,如由大开放箭头所指示。更关键地,最初将此类托架定位于管道的中间促进用于插入的收缩的最大折叠;使托架朝向管道i叶片的端平移随部署发生。托架246还具有与管道247的波纹284介接的波纹(位于其底面上i未展示)以产生在定位牵开器之后将托架246锁定在适当位置的棘轮机构。延伸部245产生于托架246且终接于经配置具有腔室287(鲜明地展示为由中断线划界)的圆柱体244中。此腔室287在颅骨内侧枢转叶片(图中也未展示)的前端上容纳柱,因此可逆地与此叶片耦合。此耦合赋予此腔室287内的柱的旋转移动,此旋转的自由由圆柱体244下方的圆形实心箭头说明。当部署牵开器时,此旋转适应内侧枢转叶片的变化角度。此整个机构完成包含牵开器重新配置及将牵开器锁定在适当位置的能力的本发明的目的。
[0147]
此牵开器230的另一关键特征是由具有准许次叶片236可滑动地重新定位于其中的开槽室的主叶片235构成的内侧叶片231的独特配置,如展示应用于示范性cs椎骨的图17h中的前i横轴透视图中所见。此叶片236还可具有一或多个弯曲踏板260。可设想多个其他实施例,将在本发明的精神及范围内考虑所有实施例。
[0148]
此可调整尺寸促进牵开器的手术中放置。内侧元件231易于由次叶片236的垂直可调整性定位。根据例如个人解剖、外科医生偏好及其他因素的因素,牵开器230的精确位置通常可变。整块叶片可不正确地设定大小,其可引起所使用的牵开器系统中的不平衡。相反地,如此处所展现,当定位内侧叶片231时,可根据当其朝向棘突上升时椎叶的角度适当地调整。还如图17h中所见,外侧元件232不需要此等级的可调整性,且包括单个叶片。内侧231
及外侧232元件分别与内侧238及外侧239枢转叶片耦合,其又产生由中心轴向销237锁定的相交延伸部240、242。
[0149]
作为下一步骤,黄韧带必须从椎叶的下侧分割以接纳椎叶锚的前颚夹。提供图18a中所展示的独特、有用、新颖及不明显韧带释放仪器320以实现此。此仪器提供于可安全地隐藏于椎叶下的弯曲前端321内而无需担心“插入”管及刺激神经元素。前端进一步由抵靠背侧椎叶的隆起悬伸保护以进一步确保不存在最前端的“插入”。仪器320从前端321通过轴322到后端323连续;后者是由外科医生使用以操纵仪器320的手柄。图18b是展示释放黄韧带lf的附属物的前端321的代表性椎叶lam的半截面。通过轻轻摆动手柄323,对等移动传输到前端321以允许其抵靠椎叶且接着沿椎叶的前面移动以在椎叶与黄韧带lf之间开发一平面。
[0150]
在本文所公开的优选及大多替代实施例中,通过植入双边椎叶锚及将这些锚与连接元件耦合而将用于稳定脊椎的此独特、有用、新颖及不显眼系统固定到目标运动片段。为实现这些目的,下文已知为植入仪器44的装置承担多个功能,包含将锚引导到抵靠椎叶的理想位置、系紧固定螺丝及将连接元件耦合到锚。图19(仪器44的后视图)及图20(正视分解图)中公开此仪器。尽管图19揭示此仪器44具有总前端45、中心轴46及后端47,但进一步检查展现此为具有中心套管针48、内套管49及外套管50的复杂仪器44。此外套管50还具有前端52、中心轴53及后端54,其中前端52具有对于实现本发明的目标较为关键的两个额外特征:首先,连接元件通过其安置以与所植入的锚耦合的剖面51;其次,呈现内侧55及外侧56抓握臂以实现仪器44的主要任务(即,在植入期间稳定椎叶锚)。为此,椎叶锚可“压入配合”于抓握臂之间,且在植入期间固持在适当位置。在图19中,应注意,内侧抓握臂55的内表面设定轮廓以容纳椎叶锚的前颚夹。当锚的螺丝系紧以使锚的螺丝朝向彼此传动时,锚的总轮廓减少,因此松弛压入配合。一旦锚固定地附接到目标椎叶,移除仪器44以将锚留在其所要位置中。在优选实施例中,抓握臂55、56经配置以在与椎叶的角度一致的偏压(如图19i 20中所展现)下固持锚,因此使植入更有效。用于将锚固持在适当位置的其他更机械复杂实施例可由所属领域的技术人员创造及预期;所有此类实施例将在本发明的精神及范围内。
[0151]
锚通过系紧固定螺丝而附接到椎叶,其迫使颚夹朝向彼此以将椎叶抓握于颚夹之间。在优选实施例中,此通过将水平杆系紧在螺丝的最后端来完成;其还可通过提供具有可由扳手旋转的配置(例如俯视图上的六边形轮廓)的螺丝的后端的周长来完成。显然,还可设想这些技术的组合。植入仪器44的此功能由图20(植入仪器44的分解图,其展示中心套管针48具有经配置以接合水平杆的前端66、轴件67及后端i手柄68)中描绘的中心套管针48完成。前端66通过内套管49的中心通道43安置(如由小十字箭头所指示)以定位前端66以接合水平杆。一旦锚定位为抵靠椎叶,套管针48的后端68致动来转动前端66以系紧螺丝。此将引起颚夹朝向彼此移动且在目标椎叶上产生固定抓握。仪器内的阈值序列将产生第一及第二声;就第一可听声音而言,水平杆将在大体上头尾方向上定向,且理想地定位以接合连接元件的前端。随着所述前端的接合,水平杆旋转另一近似90
°
,且听见确信系统锁定的第二可听声音。指示水平杆的位置还可由套管上的外部标志实现。事实上,所属领域的技术人员可预期用于完成此目标的其他及不同系统;所有此类实施例并入本发明的精神及范围内。
[0152]
植入仪器44还捕获连接元件的前端且将其固定到固定螺丝的后端。此由还具有前端69、轴组件70及后端71的内套管49实现,还见于图20中。此套管49定位于组装仪器44中的
外套管50内,如由大开放箭头所指示,其中前端69位于外套管50的剖面51背侧。此前端69经配置以捕获连接元件的平坦前端且重新定位前端使得水平杆可通过前端中的孔径安置,所述杆接着旋转以将连接元件拉到适当位置,如图22中将展现。
[0153]
图21是展现定位颅骨椎叶锚2的植入仪器44的前颈部运动片段的左侧的侧视图。锚2使用稍前偏压可逆地与前端45的抓握臂55、56耦合以使锚有利地与沿其尾侧引入的目标椎叶的偏压对准。亚椎叶颚夹4隐藏于椎叶下面以准备依上述段落152的所描述的方式将颚夹4、5固定在适当位置。中心套管针48的后端68将用于致动将锚2锁定在适当位置的螺丝的固定。
[0154]
接着,尾锚2a以相同方式固定到尾椎叶cdl lam。接着,连接元件3(展示为中断线轮廓)耦合两个锚2、2a以形成右侧cmis 1构造,如图22a中的后视图中所展示。在将尾锚2a传递到适当位置之后,固定螺丝6a系紧且移除植入仪器。在所述点处,可滑动地连接到尾锚2a的背侧颚夹sa的连接元件3的外壳机构78可在头尾方向上平移以适应连接元件3的前端74通过已植入颅骨锚2的植入仪器44的外套管50的剖面51。一旦前端74在理想位置中,外科医生可通过压缩或分散来调整头尾尺寸;接着,锁定连接元件的外壳机构78的固定螺丝88以将连接元件3固定在适当位置。
[0155]
下一及最终步骤是将连接元件3固定在适当位置。此说明于是图22a中所展示的cmis 1的放大图的图22b中;放大准许连接元件3的前端74通过其捕获及固定到颅骨锚2的机构的更佳说明。在优选实施例中,连接元件3可滑动地耦合到尾锚2a的后颚夹sa。在优选实施例中,此通过提供是由此外壳机构的可移动元件79致动的夹持机构的外壳机构78来完成,其一起形成在背侧颚夹sa周围通过的两个夹持臂。一旦连接元件的前端74已滑动到所要位置,固定螺丝88系紧以维持连接元件3的位置。已具有孔径75(展示于中断线的轮廓及实心圆中)的连接元件的前端74已通过植入仪器44的剖面51,且现经定位使得孔径75可安置于锚内的固定螺丝6的后端8上。然后仪器44内的内套管49通过手动推动其后端71而被致动,引起其分叉前端69向前推动前端74以将孔径75安置于螺丝6的后端8处的水平杆31上;在所述点处,中心套管针的后端68致动i手动旋转以引起套管针48的前端66接合随后旋转直到杆将连接元件3的前端74锁定在适当位置的水平杆31。请注意连接元件3展示为中断线轮廓以阐明促成颅骨锚的锁定机构的其他结构。另外,颅骨锚的背侧颚夹5的前端展示为双中断线以区分其与其他结构。接着,植入被视为完成。应了解使用取决于特定实施例的修改,本图及若干先前图式中所描述的植入技术基本上表示将用于已公开及以下图式中说明的所有后续实施例中的技术。
[0156]
图23是展示连接两个相邻椎叶锚及稳定目标运动片段的右侧cmis 1的优选实施例的后视图。患者位于俯卧位置中。段落142到149中说明的牵开器230维持曝露,其中页面的顶部表示手术区的顶部,且患者的右侧位于页面的右侧上。颅骨锚2的背侧颚夹5位于cmis 1的顶部,其中颅骨椎叶cr lam的颅轮缘见于颚夹5的上边缘上方。在此优选实施例中,颅骨锚2不需要相关联的连接元件。螺丝的后端的水平杆31可见于横向位置中,其中杆的边缘捕获尾侧延伸以与连接元件3的后端77处的尾锚2a耦合的连接元件3的前端74。再次,将锚2a锁定到尾椎叶cdl lam的尾缘看见锚2a的背侧颚夹sa连同固定螺丝6的后端处的水平杆31。亚椎叶颚夹4、4a已先前传递到相应椎叶。
[0157]
还预期多层构造。图24揭示椎叶锚2b已植入再次在后视图中展示的原始构造的尾
椎中的另一层级。构造1通过添加到尾端而最容易延伸。当如此时,额外锚2b的连接元件3a与现存构造内的最尾锚2a耦合。再次,应注意在每一层级处,前端74、74a的孔径75、75a安置于每一层级处的固定螺丝(6b是此投影中可见的唯一螺丝)的后端处的水平杆31、31a上;具体来说,孔径75、75a的配置使得水平杆31、31a可通过其孔径的长轴安置,但当螺丝旋转使得水平杆31、31a定向为正交于孔径75、75a的长轴,水平杆31、31a的端将悬伸连接元件3、3a的前端74、74a的侧。
[0158]
图25展示连接元件23(具体来说连接元件23的后端)的替代实施例。我们应想起在优选实施例中,此后端是与构造的尾锚的背侧颚夹耦合的夹状配置;优选实施例的前端是具有中心孔径的平坦片段。在此替代实施例中,连接元件23具有“镜像”,终端片段41、42中的每一者配置为具有相同于优选实施例中的前端的孔径(此视未展示)的平坦片段。一旦固定锚2、2a,连接元件23经定位使得水平杆31、31a通过孔径安置且旋转以抵靠背侧颚夹5、sa锁定构造。当前凸曲线提供到连接元件(例如在本文的图中)时,螺丝6a的后端sa可如所说明修改以容纳元件23的后端42。
[0159]
图25中所公开的替代连接元件23可与固定螺丝6、6a的后端的替代实施例一起利用,如图26中的侧视图中所展现。因而,这些螺丝6、6a不具有优选实施例中所见的垂直延伸部或水平杆;确切来说,螺丝6、6a终接于古典“螺丝头”实施例24中。在此实施例中,螺丝已在植入之前通过连接元件23的终端41、42中的两个孔径(通常称为“预负载”),其授权锚2、2a必须植入为单元。另外,易于明白所属领域的技术人员可预期另一修改,其中螺丝的头部将修改,因此准许连接元件的后端安置于螺丝的后端上或其他实施例及螺丝的后端与连接元件之间的关系。可在本文中预期所有此类修改,且与本发明的精神及范围一致,且当然将包含于本技术案内。
[0160]
图27是说明其中球32产生于背侧颚夹5z的颅骨下面12z的背侧表面17z的椎叶锚[图28中的2z]的替代实施例的正视图;此球32不可逆地及可旋转地与又容置将此锚2z耦合到更颅骨锚的连接元件(图28中所见)的摇台18耦合。还可在此实施例中预期半球。此摇台18是具有包装球32的前端35的整块结构,即在摇台18多轴移动之后赋予的关节连接,如由开放箭头所指示。此移动准许在附接到相邻椎叶之后由于细微解剖变动的锚的对准的微小改变的调解。
[0161]
摇台18具有含基部26、外侧壁27及内侧壁28的中心通道37。此通道37容置连接元件25的替代实施例,其经定位以在植入时部署于摇台18内。我们应注意摇台18的最背侧与螺帽29耦合。通道37的最背侧的内表面33、34具有螺纹(部分显明地展示);螺帽29的前端36也是螺纹,且随着连接元件25的令人满意的定位,部署螺帽29以将连接元件25固定在适当位置。
[0162]
再次认识到维持可设想本发明的精神及范围的这些实施例的变动。此类实施例可包含将上文所公开的螺纹放置于摇台的外部或内表面上而非内表面上,其接着通过使用螺母来部署。在另一实施例中,摇台的壁将在摇台的最背侧彼此连续,因此提供更大固定性到将通过摇台的此整块下面安置的中心锁定螺丝。
[0163]
如从图28中的侧透视图观察,连接元件25在植入期间含于摇台18内。此元件25可笔直或“优选地”具有略前凸曲线,如图中所展现。尽管此图展现侧透视图,但连接元件25旋转以展现其独特配置。我们应注意包含基本上相同于以上图7、8中所公开的优选实施例的
前端的前端39的连接元件25的组件,因为当前实施例还由理想上是矩形但当然可为任何几何配置的平坦配置。此又具有再次理想上是相同于前端39自身的形状但可为任何配置的复现的中心孔径40。孔径40是将椎叶锚彼此固定的锁定机构的关键组件,恰如优选实施例中所描述。在理想实施例中,期望连接元件25的横截面为圆形使得其可易于通过摇台18安置,但任何其他几何配置在本发明的精神及范围内。将尾椎叶锚2z固定到其目标椎叶之后,连接元件25从其原始位置前进直到其前端39在上层级处固定到锚2。连接元件25的后端37稍放大以充当无意使连接元件25前进出摇台18外的挡块。此图中还看见前颚夹4z、耦合轴72z、固定螺丝6z及前4z颚夹及后5z颚夹的齿21z、22z及连接元件25的中心部分38。
[0164]
图29进一步说明图27到28中所公开的替代实施例。在此侧透视图中,我们应注意连接元件25已头侧前进直到前端39位于一位置中使得其孔径40安置于固定螺丝的后端的水平杆31上;接着,水平杆31旋转90
°
以抵靠螺丝的后端锁定连接元件25的前端39。接着,连接元件25通过将固定帽29系紧到摇台18中而尾侧固定以将连接元件25的后端37固定在适当位置。摇台18可被视为尾锚2z的背侧颚夹5z的组件,其已抵靠尾椎叶固定。因此,可注意图27到29中所公开的实施例将依独特、有用、新颖及不明显方式稳定目标运动片段。
[0165]
图30a、b中看见另一替代实施例;在图30a中,我们应注意展示类似于优选实施例中的公开的锚的锚330、330a的侧视图,因为锚各自具有亚椎叶颚夹331、331a及背侧颚夹332、332a,其通过致动固定螺丝333、333a而抵靠椎叶固定。然而,产生于背侧颚夹332、332a且经设计以容纳稳定构造的连接杆340的喇叭形对象334、334a区分这些锚。在图30a中,我们鲜明地看见由锁定螺丝343、343a锁定于喇叭形对象334、334a内的连接杆340。喇叭形对象334的特定方面更清晰地展现于展示产生托架341i球339复合物的背侧颚夹332的图30b中。喇叭形对象334的前端338可逆地耦合到球339以赋予喇叭形对象334上的多轴移动,如弯曲箭头所展现。此允许实施例适应颈椎的变化几何形状。图30b还展现内侧335[335a]及外侧336[336a]壁又产生经设计以容纳连接杆340的通道337[337a]。在将锚330、330a固定到椎叶之后,杆340插入通道337[337a]中。这些通道337[337a]的内部通过经配置以与锁定螺丝343[343a]的前端344[344a]上的螺纹互补的螺纹347[347a];这些前端344[344a]通过喇叭形对象334[334a]的后端345[345a]安置,且由将杆固定在适当位置的螺丝起子固定到适当位置。此以独特、有用、新颖及不明显方式稳定目标运动片段。
[0166]
当然预期及使用额外锚330b实现及在图30c中说明此实施例的多层反复。当然,将利用较长杆340且将其传递到与额外锚330b相关联且固定在适当位置的喇叭形对象334b的通道337b中以稳定构造。尽管本文展示两层构造,但使用相同原理及反复,可设想c2与胸脊柱之间的任何数目个层级的构造。当然,可由所属领域的技术人员设想及预期这些实施例的变型;当然,所有此类变型在本发明的精神及范围内。
[0167]
图31中的侧视图中描绘以独特、有用、新颖及不明显稳方式稳定目标运动片段的cmis的另一替代实施例。在此变型中,锚350再次具有亚椎叶颚夹351以及背侧颚夹352,其由枢轴353可逆地耦合且由捕获椎叶的固定螺丝354被迫朝向彼此。另外,应注意固定螺丝354的后端355是螺纹,其允许后端接受与固定到更尾侧层级的锚耦合。另外,可看见外壳机构356由与锁定螺母358一起控制外壳机构356的耦合设备(此视图中未见)组件的锁定螺丝357固定到背侧颚夹352。此设备可滑动地与连接元件361的后端362耦合以显现此元件可定位于多个平面中,其再次使cmis适应于解剖变动。
[0168]
描绘锚350(32a i b i c)的组件的正视分解图以及整个实施例的图32a到d中预期图31中公开的实施例的复杂性。在图32a中,描绘亚椎叶颚夹351及固定螺丝354,其中亚椎叶颚夹351具有经配置以与背侧颚夹铰接的背侧延伸部366。如图32b及d中所说明。背侧延伸部366中的孔径377接纳铰接轴以与背侧颚夹352耦合,再次见于图32b及d中。此耦合赋予由固定螺丝354致动的颚夹351、352上的移动的前后侧轴线,固定螺丝354的前端379最初通过背侧颚夹且接着通过亚椎叶颚夹351中的孔径368安置。螺丝354的其他特征包含后端355及其轴经配置以与产生于本文所说明的主体尾侧的锚的连接元件的前端耦合的六边形部分381。此图中还看见位于亚椎叶颚夹351上的小齿389。
[0169]
图32b说明与锁定螺丝357(其接着将背侧颚夹352耦合到外壳机构(图32c))耦合的背侧颚夹352。背侧颚夹352的前端385具有锁定螺丝357通过其安置的通道371;定位销373通过跨通道371通过的前端385处的孔径372以及尾侧的孔径386,此销373将锁定螺丝357维持在适当位置。背侧颚夹352的尾端376具有固定螺丝定位为通过其的凹口378,如图32d中所见。使亚椎叶颚夹351与背侧颚夹352耦合的轴353通过背侧颚夹352的尾端376中的孔径360安置,且在通过亚椎叶颚夹(图32d)的背侧延伸部之后,此轴353接着固定到孔径380,其维持颚夹351、352的耦合。
[0170]
图32c中描绘外壳机构356及连接元件361。外壳机构356的特征包含锁定螺丝通过其安置的中心通道370(参见图32d),其中锁定螺母358的螺纹前端369将螺母358固定到通道370的背侧,其中螺母358内的通道382将接纳锁定螺丝。定位销367将通过外壳机构356中的尾孔径387及颅骨孔径388以在组装期间固定锁定螺丝。连接元件361耦合到具有经致动以最佳定位元件361的耦合设备375的外壳机构356。此通过抵靠锁定螺丝的前端系紧固定螺母358实现,其引起耦合设备375使后端362及连接元件361的轴363的至少部分安置于其中的通道383变窄,且可在使通道383变窄之前重新定位。一旦变窄,连接元件361锁定到适当位置,其中元件361的前端364耦合到构造的更颅骨锚,其中颅骨锚的螺丝的后端通过固定螺母365的通道384内的内部螺纹安置且与内部螺纹介接。在成功定位之后,固定螺母365系紧,因此稳定目标运动片段。
[0171]
图32a到c中说明的组件的组装到锚350的完整实施例展现在图32d中。颚夹351、352的耦合通过将亚椎叶颚夹351的背侧延伸部366插入背侧颚夹352的凹口378中来完成,如由弧形中断线所指示。还指示通过背侧颚夹352中的孔径360且[据推测]一旦此在适当位置通过背侧延伸部366中的通道377的轴353,且最终轴353的前端再次固定到背侧颚夹中的孔径380,因此强迫耦合。在至少一个实施例中,轴353使用“压入配合”固定到孔径380中。固定螺丝354通过背侧颚夹352中的凹口378安置且最终安置于亚椎叶颚夹351中的孔径368中,如由由向下箭头突出显示的中断线所指示。此布置定位螺丝354使得在致动螺丝354之后,颚夹351、352被迫朝向彼此,其如先前所公开将锚固定到椎叶。锁定螺丝357通过背侧颚夹352的通道371且到外壳机构356的通道370中,如由使用向上箭头突出显示的中断线所指示。定位销373通过背侧颚夹352中的孔径372将螺丝357固定在适当位置。此螺丝357的前端359通过外壳机构375的通道370安置,且安置于锁定螺母358的通道382中以将背侧颚夹352锁定到外壳机构375。一定位销367用于在张力下维持螺丝357。如先前所公开,随着系紧螺母358,固定连接元件361。在将此固定在适当位置之前,头尾尺寸可通过压缩或分散构造来调整,且一旦完成此且位于令人满意的位置,固定外壳机构356的固定螺母358,因此在所要
位置中捕获连接元件。
[0172]
图31、32a到d中公开的实施例的完整构造描绘为固定到图33(c3到c7脊柱片段的右侧后斜视图)中的颈椎。此展现具有固定到c5及c6椎叶的右侧锚350、350a的构造390,其中连接元件361a稳定运动片段。当实际上减少时,与更颅骨锚350相关联的连接元件361将不并入正常构造中,因为其可干扰构造上的椎叶(在此实例中,c4右侧椎叶)的移动。另外,最终反复将配置尾锚350a使得其将不具有干扰构造尾侧的椎叶的尾悬伸。此图仅具说明性,且将预期在诊所实践中,构造可能将双边植入。
[0173]
可预期图31中的替代实施例的多层构造,且隔离状态中的此构造的侧视图展示于图34中。每一连续锚350、350a、350b、350c、350d由连接元件361a到d依相同于单片段实施例中所见的方式耦合到更颅骨锚。
[0174]
图35描绘图31中呈现的锚350的替代实施例的隔离、多层构造的侧视图;然而,此配置利用连接到锚350、350a到d的单个杆连接元件391且因此稳定构造。当然,可由所属领域的技术人员设想及预期这些实施例的变型;当然,所有此类变型在本发明的精神及范围内。
[0175]
在另一实施例400中,锚401、401a再次包括亚椎叶颚夹402、402a、背侧颚夹403、403a、由轴411、411a耦合及由通过若干对颚夹402、403及402a、403a的尾侧安置且迫使颚夹朝向彼此的固定螺丝404、404a致动的这些对锚,因此依基本上等效于本文所公开的先前实施例的方式将锚401、401a固定到椎叶。另外,如在一些先前实施例中,锚内的螺丝404、404a的关系使得当螺丝404、404a带到各种位置中时,了解一系列可听滴答声。如图36a(此实施例的正视图)中所说明,此实施例的不同特征是连接元件405,其在此替代实施例中包括前端406、中心部分407及后端408;此连接元件405的部署提供以独特、有用、新颖及不明显方式稳定目标运动片段的装置400。连接元件405的前端406基本上平坦及扩展,且在配置上是椭圆形或矩形。其具有中心孔径409,且在配置上类似于图7、8、22a、22b、23中所公开以及图25、29中所公开的替代实施例中所见的连接元件的优选实施例。在此实施例中,在通过致动固定螺丝404而将颅骨锚401固定到目标椎叶之后,第一可听滴答声展示锚几乎完全固定,其中提供到螺丝404的后端412的水平杆413位于理想位置中(沿头尾轴线定向)以接受连接元件405的前端406上的孔径409,其将预期与更尾锚401a相关联。此实施例的中心特征是连接元件405的后端408,其是不可逆地锚定于产生于背侧颚夹403a的肌肉表面416a的杯形承窝415内的球形配置。此配置赋予连接元件405上的多轴移动。杯形承窝415的周长中的缺陷417a支持角的范围内的此耦合以适应解剖及放置中的轻微变动。接着,连接元件通过推动由弧形中断线划界的进程来部署以在固定螺丝404的水平杆413上传递孔径409。正常头尾尺寸可实现为孔径409的配置的功能,其在所述尺寸中较大。此准许外科医生应用实现最佳头尾位置的压缩/分散,接着,在所述点处,水平杆413旋转到最终位置。在所述点处,致动承窝415的周长内的一或多个螺丝418以防止旋转以实现构造的正式锁定及稳定。还应注意颅骨锚401的背侧颚夹403经修改使得其不具有承窝,因为[更]颅骨连接元件不(明显)需要。在本文未说明的此实施例的变型中,提供无连接元件的承窝。另外,这些杯形承窝经设计使得连接元件的前端可插入已具有如果未来需要头侧延伸部那么准许前端“按扣到”适当位置的配置的杯中。
[0176]
图36b中描绘其中连接元件依此方式旋转到适当位置的隔离多层实施例。再次,头
顶锚401不具有连接元件机构。否则,在连续尾侧方向上,锚401a、401b、401c由于由水平杆413、413a、413b锁定的连接元件405、405a、405b的部署而耦合到更多颅骨锚。再次,在致动之后防止球旋转的一或多个螺丝418在承窝415a、415b、415c中的每一者的周长内。当然,可由所属领域的技术人员设想及预期这些实施例的变型;当然,所有此类变动在本发明的精神及范围内。
[0177]
在图37中的侧视图中检查此实施例520的变型。如图中所展现,再次存在由螺丝522、522a致动以再次抵靠目标椎叶固定的颅骨锚521及尾锚521a。然而,不同于迄今所公开的实施例,此经独特特征化,因为不存在耦合这些锚521、521a以稳定构造的不同连接元件。确切来说,每一锚具有包括长形前端527、527a及位于护套承窝523、523a内的球形后端526、526a的长形、整块半连接器525、525a。此布置赋予半连接器525上的多轴移动。在定位锚521、521a之后,半连接器经重新定位使得最前端528、528a彼此接近,因此产生“模块”连接元件。接着,耦合元件529使用提供到元件529以及最前端528、528a的螺纹或“冷焊”、“压入配合”或技术中已知及可接受的任何其他方法完成构造。作为最终步骤,螺丝524、524a抵靠球525、525a系紧以防止旋转。
[0178]
可设想多接头实施例,其中此实施例420的侧视图展现于图38中。此处,应注意锚421、421a再次具有亚椎叶颚夹422、422a、由轴424、424a耦合及由依相同于本技术案中先前所公开的所有锚的方式抵靠椎叶固定的固定螺丝425、425a致动的背侧颚夹423、423a。赋予用于稳定目标运动片段的此独特、有用、新颖及不明显稳方法的鉴别特征是连接复合物430产生于颅骨锚421耦合到产生于尾锚421a的连接复合物430a的方式,每一者是另一者的“镜像”且朝向彼此,且由中心稳定接头427耦合,因此稳定构造420。
[0179]
每一连接复合物430、430a包括垂直片段431、431a及水平片段432、432a。突出433、433a(叠加中断线)产生于背侧颚夹423、423a的背侧表面426、426a且配合到垂直片段431、431a内的腔室434、434a中。这些结由与突出433、433a的外表面上的螺纹及垂直片段431、431a介接的螺纹定位连接器435、435a调节。这些耦合提供外科医生调整构造的垂直高度的能力以及内外位旋转以适应解剖变动。接着,水平片段432、432a与中心稳定接头427耦合。在此说明中,颅骨水平片段的前端436渐缩且传递到尾水平延伸部432a的前端436a中的腔室中;中心稳定接头427基本上是圆柱形,其中螺纹中心通道428(由一系列对角线定向阴影圆指示)再次经配置以与水平片段432、432a上的螺纹缠绕。中心稳定接头427可独立引入或可可滑动地耦合到水平片段中的一者及重新定位。在另一实施例中,中心稳定接头427足够长以与两个水平片段的前端耦合。不管实施例,中心稳定接头427可满足外科医生在头尾尺寸(即,分散i压缩)中的要求且构造420完整。耦合(包含冷焊、压入配合、使用固定螺丝等等)的任何其他方式全部在本发明的精神及范围内。垂直片段及水平片段的正交关系并不绝对;任何角关系或任何其他配置(包含单个弧形配置)在本技术案的精神及范围内。
[0180]
图39a/b审查图38中显示的实施例的多层实施例。应注意此实施例提供展示存在颅骨延伸部441及尾延伸部442的图39a中说明的中间锚440。这些各自具有垂直片段443、444及水平片段445、446;垂直延伸部具有接受产生于背侧颚夹458的背侧突出449、450的腔室447、448,这些结由定位连接器451、452调节。水平片段445、446是耦合到相邻锚的点,且具有独特组件以实现此。再次,配置可变动;在此图中,应注意颅骨水平片段445具有腔室454,其中尾水平片段446具有经设计以安置于此腔室中的延伸部455;然而,这些可反转,或
两个片段可具有延伸部。还应注意在此说明中中心稳定接头427可滑动及不可逆地耦合到颅骨水平片段445。凸缘453提供到水平片段445的最前端以防止接头427从端滑落。我们可设想此片段与互补片段配合,其中接头427接着在锁定构造之前可滑动地重新定位。如图39b中所展示,这些锚440、440a彼此耦合,以及使用颅骨430、441及尾430a、442延伸部延伸部以及中心稳定接头427、427a、427b以相同于上述的方式与尾锚421及尾锚421a耦合。可预期延伸于任何数目个片段上的构造。
[0181]
在图40中,看见类似于图38、39中公开的一些特征的实施例460。此侧投影展示耦合到包括颅骨元件464及尾元件465的中心定位器463的相同颅骨锚461及尾锚461a。这些包括垂直片段468、469及水平片段466、467,由片段(在此情况中,466)的前端可滑动地耦合的后者可定位地插入另一稍大前端的腔室内。使用精确头尾定位,锁定螺母470将构造460固定在适当位置,再次产生模块连接元件463。具有安置于垂直耦合器474、475(垂直片段的这些组件由点刻指示)中的前端472、473的垂直片段468、469;耦合器是经配置以与锚461、461a上的背侧突出462、462a上的螺纹缠绕的可旋转螺纹圆柱体471、471a。垂直片段及背侧突出的此配置控制垂直尺寸(解剖地,前后侧尺寸);另外,垂直片段可沿内外位轴线旋转,所有片段适应解剖中的变动。一旦最终位置由外科医生实现,中心定位器463通过将水平锁定螺丝470及垂直锁定螺丝476、477而锁定,因此以独特、有用、新颖及不明显方式稳定构造460。
[0182]
图41说明图40中描绘的构造的多层构造460a的侧投影。再次提供一系列相同锚461、461(a到z);此外,实施例460a具有扩展中心定位器480,其中此定位器480的颅骨元件485及尾元件486与具有含接受颅骨485及尾486元件的水平片段487、488的前端的中心通道483的水平定向片段482的基本上“t状”中间元件481耦合,这些由固定螺丝489、490锁定在适当位置。中间元件481的垂直组件484是固体及整块,且引导到中间锚461a的垂直耦合器476中(耦合器内的垂直片段由点刻指示)。一旦此由锁定螺丝494a固定,那么水平片段487、488在可滑动地定位水平片段之后固定使得垂直片段492、493可安置于颅骨锚461及尾锚461b的垂直耦合器474、475中(挤压于耦合器内)以使用锁定螺丝494、494a、494b锁定垂直片段,因此完成构造460a。应注意水平片段487、488具有前凸曲线,其在多层构造中可能必需。在较大构造中,预期附件连接杆将定位于两个中间元件481、481a到z之间。据推测,构造可包含由悬吊字母指示的所需尽可能多的中间锚及元件。
[0183]
图42中描绘其中螺纹背侧突出产生于锚的实施例500的另一变形,其中侧视图展示基本上标准锚501、sola,其中螺纹突出503、503a从固定螺丝502、502a的最背侧延伸。模块连接元件504的独特、有用、新颖及不明显配置包括颅骨510及尾511组件,其中这些组件可滑动地耦合使得组件(在此实例中颅骨组件510)的自由边缘512安置于提供到另一组件511的扩展中心腔室513以可滑动地调整头尾尺寸。接着,组件由固定螺丝514锁定。连接元件504的每一组件510、511具有球形耦合器505、506可逆地保留在其内的摇台515、516以提供耦合器显著运动范围。这些耦合器505、506具有安置于自由端509、509a上的螺纹腔室507、508(由中断线框定),如由箭头指示,其中球505、506由特殊仪器(未展示)旋转直到构造在适当位置。接着,固定螺丝517、517a将整个构造500锁定在适当位置。我们可设想除这些螺丝之外使用固定螺母或替代这些螺丝使用螺母。当然,可预期多层实施例且多层实施例在本发明的精神及范围内。
[0184]
图43(其中修改锚531、531a不包含固定螺丝的构造530的侧视图)中设想及展示此概念的甚至更完全变型。替代地,锚531、531a由目的特定修改植入仪器(未展示)抵靠椎叶稳定而模块连接元件534的独特、有用、新颖及不明显设计稳定构造530。连接元件534具有颅骨535及尾536延伸部,各自具有又具有容置关节球539、540的摇台537、538的耦合端543、544。固定螺丝541、542与所述球539、540连续及与之成为一整体;此配置赋予球539、540及因此螺丝541、542限制运动范围。螺丝541、542通过锚531、531a内的管道532、532a安置;此动作同时锁定锚531、531a且稳定构造530。构造530还可沿头尾轴线调整。此可调整性源于延伸部535、536的自由端547、548的耦合,其中延伸部(在椎叶情况中尾延伸部)的自由端具有容纳颅骨延伸部535的自由端547处的延伸部550的腔室549存在于其内的扩展自由端;此扩展助于锁定延伸部。端547、548可相对于彼此可滑动地重新定位,且因此头尾可调整性。一旦实现所要位置,锁定螺丝551将连接元件534固定在适当位置。
[0185]
图44a描绘侧视图,最佳透视以了解由本说明书中所公开的实施例的任何者的最低前后轮廓特征化的替代实施例560的独特特征。此通过公开复杂连接元件562以与锚561、561a的头顶571下面及尾底572下面独特耦合来完成,通过仔细查看图44b中的放大最佳理解元件562。此展现连接元件562具有后端563及前端567。后端563是整块但具有两个下面,与连接延伸部564相连续的球形基座565。连接延伸部564自身具有接受及可滑动地耦合连接元件562的前端567的调整杆568的位于自由端566内的接纳室,其调整头尾直径且接着由中间固定螺丝574锁定。球形基座565不可逆地保留于是尾锚561a的头顶下面571的组件的承窝570内,如图44a、b两者中可见。此配置在连接元件562适应解剖变动之后赋予多轴移动范围。一旦完成连接元件562的所要定向,部署尾固定螺丝575。连接元件的前端567的最前端下面569展现放大部,其接着安置于外壳腔室576中且使用颅骨固定螺丝573锁定。尽管在此描绘中,球形端565耦合到尾锚561a,但当然可预期表示配置的反转的实施例且实施例在本发明的精神及范围内。
[0186]
我们可继续设想其他实施例。在图45中,替代实施例580展示固定到目标运动片段的颅椎的薄椎叶的颅骨下面的椎叶锚581,其与本说明书中所公开的典型方式形成鲜明对比。接着,此锚581由杆状连接元件583耦合到以以上所要实施例中所公开的标准方式固定到尾椎的薄椎叶的椎叶锚582。这些锚581、582中的每一者具有类似于图30a到c及段落166、167中所公开的摇台584、585。例如所述实施例中的摇台,本文的摇台584、585具有由线展现的中央通道586、587。这些通道586、587的基座经配置以容纳连接元件583;另外,这些通道584、585的壁具有螺纹以与提供到固定螺栓588、589的外表面的螺纹介接。这些螺栓588、589在摇台584、585内的中断线中勾勒,其中螺栓588、589的后端位于摇台584、585的顶部。为完成构造,连接元件583定位于通道内且使用固定螺帽588、589锁定以稳定构造580。
[0187]
重要的是认识到可设想及预期上文所呈现的实施例的组合,且将在本技术案的精神及范围内考虑所呈现的实施例的任何组合。
[0188]
反复及实施例以其一般格式呈现,但应认识到阅读及变得了解本文所呈现的发明的其他人及特定来说所属领域的一般技术人员可开展及展现当面对这些公开内容时明显的其他实施例;显然,所有类似实施例及反复在本发明的精神及范围内。
[0189]
前述仅被视为说明本发明的原理。另外,由于所属领域的技术人员易于想到多种修改及改变,因此不被视为期望使本发明受限于所展示及描述的精确构造及操作。尽管已
描述优选实施例,但细节可在不背离当申请后续非临时申请案时由权利要求书描述的本发明的情况下改变。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。