减振玻璃体切除术探针
1.优先权声明
2.本技术要求于2019年9月16日提交的、发明人为nathaniel reyes和john r.underwood、名称为“reduced vibration vitrectomy probe[减振玻璃体切除术探针]”的美国临时专利申请序列号62/900,756的优先权权益,特此将其全部内容通过援引并入本文,如同在本文完全和完整地阐述一样。
背景技术:
[0003]
多年来,视网膜眼科手术领域已经取得了许多重大的进展。然而,无论特定的视网膜手术过程如何,通常该手术过程的至少一部分都包括玻璃体切除术。玻璃体切除术是从患者的眼睛中移除部分或者全部的玻璃体。在某些情况下,如果手术仅限于移除混浊的玻璃体,则玻璃体切除术可能构成该手术过程的主要部分。然而,玻璃体切除术也可能伴随有白内障手术、视网膜修复手术、处理黄斑皱褶的手术、或处理许多其他问题的手术。
[0004]
玻璃体本身是透明凝胶,可以通过插入穿过预放于眼睛处的套管的长形探针而去除。更具体地,该探针包括用于移除玻璃体的中央通道。进一步地,该套管提供了结构上的支撑性导管,该支撑性导管策略性地定位于眼睛前部、例如睫状体平坦部处的偏置位置。以此方式,探针可以以避免损伤患者晶状体或角膜的方式引导性地插入眼睛中。
[0005]
不幸的是,移除玻璃体需要比简单地通过探针通道施加真空更加小心。这是因为玻璃体包括胶原原纤维的纤维基质。因此,仅仅对凝胶施加真空会将周围的眼部结构置于危险之中。也就是说,凝胶的纤维性质使得在进入探针内的凝胶上的真空拉力可能转化为对视网膜、视神经或其他脆弱眼部结构的拉力。
[0006]
为了解决这个问题,玻璃体切除术探针被构造成在玻璃体被吸入探针通道时切割玻璃体。以此方式,在该胶状物质上的连续纤维拉力不会转化为对脆弱眼部结构的拉力。而是,玻璃体以众多非常小的切碎段被拉入探针的通道中。通过探针通道中的切割器的往复运动来对玻璃体进行切削或切割。更具体地,该切割器在玻璃体被吸入通道时以切割该物质的方式在用于吸入玻璃体的端口处来回往复运动。以此方式每分钟可以进行大概5,000至10,000次循环的切割,以在移除玻璃体时保护眼睛不受玻璃体的牵拉。事实上,切割器往复运动越快,以较小牵引力发生玻璃体切割的程度就越大。因此,如上所述为患者的脆弱眼睛特征提供的保护程度越大。
[0007]
按照这些思路,这些年来刀具往复运动变得越来越快。因此,玻璃体切除术过程期间对玻璃体上的“牵拉”的担心已经很大程度上被消除。然而,以此方式使切割器往复运动意味着在玻璃体切除术期间,振动通过玻璃体切除术探针而自然平移。因此,手动执行该手术过程的外科医生在狭窄的脆弱的空间中操作探针时面临着与振动相关的干扰的情景。
技术实现要素:
[0008]
披露了一种玻璃体切除术探针。在一个实施例中,该探针包括部件壳体。该壳体的腔室内的隔膜被构造成用于在玻璃体切除术过程期间以至少约2,500次切割/分钟(cpm)的
速率往复运动,其中该往复运动包括隔膜在限定腔室的壁处的重复撞击。第一空气通道和第二空气通道用于使隔膜在其第一侧和第二侧处往复运动,其中这些通道具有至少约0.00275in2的容积以最小化限流,而有助于空气压力小于约50磅/平方英寸(psi)以阻尼该撞击。
[0009]
在另一实施例中,该探针包括具有延伸管的部件壳体,该延伸管定位在其通道中以用于在玻璃体切除术过程期间响应于空气压力的交替供应而往复运动。这有助于切割玻璃体。围绕延伸管的第一密封环对管施加第一压缩载荷,以将通道与引导往复运动的空气压力密封隔离。同时,围绕延伸管的第二密封环对管施加第二压缩载荷,以将通道与真空密封隔离。第二压缩载荷基本上小于第一压缩载荷,以减少用于往复运动的空气压力的量。
附图说明
[0010]
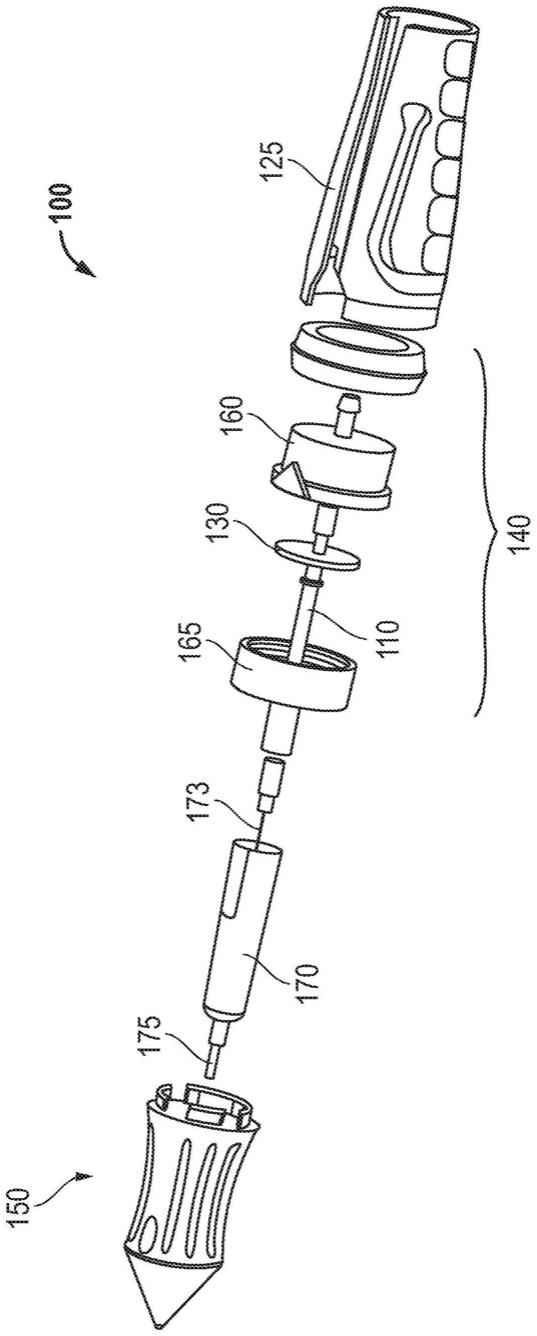
图1是减振玻璃体切除术探针的实施例的分解立体图。
[0011]
图2是组装形式的减振玻璃体切除术探针的立体图。
[0012]
图3a是具有阶梯通道的图2的玻璃体切除术探针的内部后壳体部件的实施例的侧视截面图。
[0013]
图3b是用于使用常规均匀通道的玻璃体切除术探针的现有技术内部后壳体部件的侧视截面图。
[0014]
图4是图3a和图3b的内部后壳体的侧视截面图,该内部后壳体固定到内部前壳体并以减小摩擦的方式容纳延伸管。
[0015]
图5是用图2的玻璃体切除术探针执行的玻璃体切除手术的实施例的概述。
[0016]
图6是在外科手术过程中使用减振玻璃体切除术探针的实施例的总结流程图。
具体实施方式
[0017]
在以下描述中,阐述了许多细节以提供对本披露的理解。然而,本领域技术人员应理解,可以在没有这些特定细节的情况下实践所描述的实施例。进一步地,可以采用许多变型或修改,这些变型或修改仍然由具体描述的实施例所构想。
[0018]
参照特定类型的玻璃体切除术探针外科手术过程来描述实施例。特别地,展示了移除玻璃体以解决玻璃体出血的手术过程。然而,本文中详述的工具和技术可以以各种其他方式使用。例如,如本文中所详述的玻璃体切除术探针的实施例可以用于解决视网膜脱离、黄斑皱褶、黄斑裂孔、玻璃体飞蚊症、糖尿病性视网膜病变或各种其他眼部疾病。无论如何,只要玻璃体切除术探针并有如本文所详述的减振特征,就可以实现可观的益处。
[0019]
现在参考图1,示出了减振玻璃体切除术探针100的实施例的分解立体图。如上所述,为了减振,各种特征被并入到探针100中。例如,握持部件150具备增强的人体工程学结构。具体地说,假设此部件150在玻璃体切除术过程期间与外科医生的手直接接触,提供软触碰特征可以帮助衰减和最小化到达外科医生的振动量。例如,在所示的实施例中,握持部件可以由小于约60肖氏a硬度的常规弹性体构成。这与常规握持部件形成鲜明对比,这些常规握持部件通常是硬质聚碳酸酯包覆成型件。
[0020]
与常规握持部件不同的是,所展示的部件150可以具有小于约0.5英寸的减小的直径。较小的直径结合软触碰握持部件150可以实现较精细的指尖控制,并为手动复杂操纵留
有较大空间。
[0021]
除了握持部件150之外,各种其他减振特征并入到探针100中。例如,坚持较软材料选择的概念,所展示的隔膜130在探针壳体140的壳体部件160、165之间往复运动,而最终驱动切割器173在针175内的移动。在隔膜130的这种往复运动期间,它重复撞击壳体部件160、165中的每一个。更具体地说,隔膜130的离散止动件450可能重复撞击壳体部件160、165,这导致所述振动(参见图4)。然而,在一个实施例中,止动件450由软硅橡胶或小于约60肖氏a硬度的其他合适材料制成。因此,振动可能不仅衰减,而且首先较小程度地产生。
[0022]
继续参考图1,人体工程学外壳125被示出在探针100的一个端部处,在玻璃体切除术过程期间,该端部可以放在外科医生的手上。在探针100的另一端部附近,联接件170被示出为在前壳体部件165之前固定在切割器173上方。然而,在前壳体部件165之后是延伸管110,该延伸管在玻璃体切除术过程期间容纳切割器173。如下文进一步详述,延伸管110被独特地构造成减小往复运动期间的摩擦。结果,以进一步阻尼隔膜130在每个壳体部件160、165处的重复撞击的冲击的方式,减少了使隔膜130和管110往复运动所需的力的量。
[0023]
现在参考图2,以组装形式示出了减振玻璃体切除术探针100的立体图。在此视图中,玻璃体借以被吸入探针100的针175中的端口277被示出在软触碰握持部件150之前。此部件150被固定到壳体140,其中外壳125也装配到壳体140上。因此,从外科医生的角度来看,单一手持式外科手术工具具备减少的振动干扰。
[0024]
就减少外科医生的振动干扰而言,提供了另一特征,该另一特征从探针100的外部视图来看并不明显。具体来说,图3a是具有阶梯通道315的图2的玻璃体切除术探针的内部后壳体部件160的实施例的侧视截面图。也就是说,图1的隔膜130的往复运动是通过以交替方式被引导到隔膜130的任一侧的空气压力来实现的。更具体地说,另外参考图1,通过下腔室330的空气可以被引导到隔膜130的后侧,以向前推动延伸管110并推进切割器173。替代性地,通过上腔室325的空气可以最终被导引到隔膜130的前侧,以最终迫使切割器173背离针175的端部缩回。
[0025]
由于上腔室325中所涉及的附加导引,空气到达隔膜130的相对前侧,常规架构是提供穿过后壳体160的均匀通道327(参见图3b)。然而,对于图3a的实施例,这种类型的通道已经被阶梯通道315替换,以便基本上避免呈现限流。结果,图1的隔膜130可以在较小的空气压力下在向后方向上往复运动,而不会损害往复运动的总速率。例如,在一个实施例中,如所描绘的阶梯通道315允许施加不到50psi,同时仍然实现2,500cpm的往复速率。在一个实施例中,不到15psi可以足以实现大于2,500cpm的速率。由于驱动往复运动的空气压力的这种显著降低,也导致隔膜130在壳体壁处的撞击的相应减少。因此,可以看到在玻璃体切除术期间的分散注意力的振动的附加程度的最小化。
[0026]
如此处和图4所展示,阶梯通道315是隔膜前侧流动路径的一部分,该部分包括具有至少约0.00275in2的容积的上腔室325。然而,与图3b的现有技术相比,主要区别是基本上消除了到达出口300的均匀通道327。也就是说,虽然(d)处的入口和出口300的尺寸在图3b的现有技术和图3a的实施例中可以大致相同,但是后者在到达出口300时没有限流均匀通道327。实际上,设置了阶梯通道315。
[0027]
现在具体参考图4,图3a和图3b的内部后壳体160的侧视截面图被描绘为固定到内部前壳体165并以减小摩擦的方式容纳延伸管110。也就是说,如上所述,隔膜130响应于通
过一个腔室325或另一腔室330的空气压力而交替往复运动。这种往复运动使延伸管110前后移动,从而最终为玻璃体提供切割功能(例如,参见图5的外科手术描绘)。无论如何,以这种方式使用空气压力意味着密封件400、425、475可以围绕管110设置在壳体140内的不同位置处。例如,这可以防止在如图5所展示的手术期间意外地将高压空气引导到患者眼睛550中的潜在灾难性事件。
[0028]
以这种方式使用密封件400、425、475意味着可以引入对管110的往复运动的摩擦阻力。最终,这可能转化为需要利用较高压力以驱动往复运动,这又意味着止动件450产生较高撞击力并且因此产生了较高程度的振动。然而,对于图4所描绘的实施例,此摩擦阻力策略性地减小。更具体地说,图4的实施例承认,只有最前面的密封件475在如图5所描绘的手术期间实际上起到保护患者眼睛550的作用。这是因为如果没有被前密封件475密封(参见图5),则只有如通过上部通道325引导的返回冲程才有可能到达患者眼睛550。其他空气通路由隔膜130本身的前部密封(例如,参见通道330),或者涉及穿过管110的中心的真空,该真空移除玻璃体。如果这些密封件400、425中的任何一个失效,则患者眼睛550不会处于危险中(参见图5)。
[0029]
考虑到这一点,延伸管110、密封件400、425、475和周围架构的实施例可以被构造成在不牺牲患者安全的情况下减小密封件-管界面处的整体摩擦。例如,在一个实施例中,管的外径可以减小到约0.05英寸以下,并且被电抛光,而不改变后密封件400、425的内径的尺寸。类似地,利用低于约70肖氏a硬度的密封件400、425、475可以最小化摩擦。为了患者的安全,较关键的前密封件475的内径可以减小。然而,总的摩擦阻力仍会以降低空气压力和振动产生止动件450的撞击力的方式显著降低,如上文所详述。
[0030]
在上述实施例中,管110外径的变化可以不伴随内径的任何显著变化。例如,在延伸管的常规内径可以是约0.035英寸的情况下,管110可以保持这种相同内径。结果不仅保持了管110在玻璃体吸入中的功能能力,而且提供了较细的管110(例如,直径约0.0010英寸)。结果,提供了较轻的管,这进一步减小了必要的空气压力往复力以及本文所述的止动件450的所得振动撞击。
[0031]
在另一实施例中,减小所述撞击的力和所得振动可以通过减小止动件450行进的距离的量来实现。例如,如所展示的是,在隔膜130居中的情况下,止动件450与其任一侧上的邻近壳体结构之间的距离可以是约0.015英寸,其中总行进距离为0.030英寸。然而,由于止动件450在隔膜130的顶部后部没有流动路径干扰,此距离可以减小,例如,减小到0.005英寸,以使得总行进距离被限制到0.020英寸。因此,来自此止动位置的撞击力和所得振动可以减小。类似地,隔膜130的下部的止动件可以是相反情况,由于流动路径的存在,后侧止动件具有较大行进距离(例如,0.015英寸),但是前侧止动件具有较小行进距离(例如,0.005英寸)。换句话说,通过使每个非流动路径止动件与邻近壳体结构之间的距离比每个流动路径止动件与邻近壳体结构之间的距离短,可以减小止动件行进距离。
[0032]
用于减小管110处的摩擦的附加措施可以包括在密封件400、425、475的内径处放置硅酮润滑剂。这可以包括将这种润滑剂放置在如图1所展示的针175的入口内或入口附近与切割器173界面连接的密封件处。在此类实施例中,密封件400、425、475也可以是经聚对二甲苯涂覆的聚合物或聚四氟乙烯涂层。
[0033]
现在参考图5,展示了用图2的玻璃体切除术探针100执行的玻璃体切除手术的实
施例的概述。在此视图中,利用了图2的玻璃体切除术探针100,该玻璃体切除术探针具有图1的切割器173。在此外科手术过程期间,将针175插入通过预先放置的套管530,然后朝向将要移除玻璃体的区域510引导。具体地,如上所述,施加吸力并且使用端口177来将玻璃体或者其他物质吸入。例如,在所示手术过程中,可能在区域510中发生出血,使得血液与玻璃体一起被吸入端口177。
[0034]
另外参考图1和图4,还如上所述,在此精细的手术过程期间,切割器173在针175内往复运动。这意味着壳体140内的隔膜130重复使切割器173往复运动,可能超过10,000次/分钟。虽然存在这种往复运动以及隔膜130的止动件450在壳体结构处的大量撞击,但是如本文所详述,探针100的各种特征将振动保持在最小。从外科医生的角度来看,并且为了患者的利益,在手术期间,潜在的分散注意力的噪音已经减轻。
[0035]
继续参考图5,所展示的手术包括探针101和光仪器525通过以偏置方式定位在巩膜570处的套管515、530而到达眼睛550中。以此方式,可以避开更脆弱的角膜590和晶状体580。同样地,视神经560和视网膜575也相当脆弱。因此,假设针175能够到达这些脆弱特征,则光仪器525可以用于为外科医生照亮眼睛550的后部与针175的端部两者。
[0036]
现在参照图6,示出了在外科手术过程中使用减振玻璃体切除术探针的实施例的总结流程图。在如图5所展示并且如620所注明插入探针的情况下,如660所示,可以从患者眼睛取出玻璃体。这是通过切割器在探针的针内的往复运动来实现的(参见640)。如680所示,这种往复运动伴随有因往复运动所致的振动的衰减。无论是通过柔软握持、阶梯通道空气压力、延伸管处的减小的摩擦、行进距离缩短的硅橡胶止动件还是各种附加措施,都可以实现可观的益处。
[0037]
上文描述的实施例包括玻璃体切除术探针,该玻璃体切除术探针具有适于从外科医生的角度衰减可能分散注意力的振动的各种特征和改进。在每种情况下,振动的减少都是在不牺牲玻璃体切除术探针的切割器的往复速率的情况下实现的。因此,以不损害探针对手头外科手术过程的有效性的方式实现了减振。
[0038]
已经参考多个不同实施例给出了前面的描述。然而,可以采用上文披露但未详述的其他实施例和/或实施例的特征。此外,与这些实施例有关领域和技术的技术人员将了解,在不有意义地背离这些实施例的原理和范围的情况下,还可以对所描述的结构和操作方法进行其他改变和变化。另外,前述描述不应被解读为仅与所描述和附图中示出的精确结构有关,而应被解读为与所附权利要求相一致并作为对其的支持,所附权利要求具有其最完整和最公正的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。