技术特征:
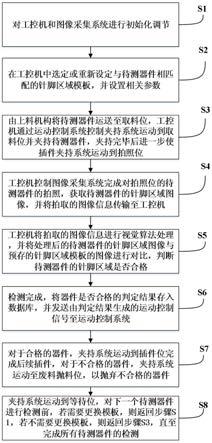
1.一种异型元器件的针脚检测方法,其特征在于,采用包括工控机(1)、运动控制系统(3)、图像采集系统(4)及夹持系统(5)的异型元器件的针脚检测装置,且包括如下步骤:s1、对工控机(1)和图像采集系统(4)进行初始化调节;s2、在工控机(1)中选定或重新设定与待测器件相匹配的针脚区域模板,并设置相关参数;s3、由上料机构将待测器件运送至夹持系统(5)的取料位,工控机(1)通过运动控制系统(3)控制夹持系统(5)运动到取料位并夹持待测器件,夹持完毕后进一步使夹持系统(5)运动到拍照位;s4、工控机(1)控制图像采集系统(4)完成对拍照位的待测器件的拍照,获取待测器件的针脚区域图像,并将拍取的图像信息传输至工控机(1);s5、工控机(1)将拍取的图像信息进行视觉算法处理,并将处理后的待测器件的针脚区域图像与预存的针脚区域模板的图像进行对比,根据对比结果来判断待测器件的针脚区域是否合格;s6、检测完成,将器件是否合格的判定结果存入数据库,并发送由判定结果生成的运动控制信号至运动控制系统(3);s7、对于合格的器件,工控机(1)通过运动控制系统(3)控制夹持系统(5)运动到插件位完成后续插件,对于不合格的器件,工控机(1)通过运动控制系统(3)控制夹持系统(5)运动至废料抛料位,以抛弃不合格的器件;s8、工控机(1)控制运动控制系统(3)将夹持系统(5)运动到等待位,以等待对下一个待测器件的检测,对下一个待测器件进行检测前,若需要更换针脚区域模板,则返回步骤s1,若不需要更换针脚区域模板,则返回步骤s3,直至完成所有待测器件的检测。2.根据权利要求1所述的异型元器件的针脚检测方法,其特征在于,步骤s5具体包括:s51、首先使用均值滤波算法对针脚区域的图像信息进行平滑、降噪处理,再进行灰度形态学开运算处理,然后对开运算处理后图像信息进行灰度值线性变换;s52、若图像信息中不存在标示点,则直接进入步骤s53,若图像信息中存在标示点,则对标示点亮斑区域进行面积大小测量、位置偏移检测及点数测量,根据测量结果判断标示点是否合格;s53、使用局部动态阈值分割方法从图像信息中选出初步针脚区域;s54、对步骤s53中选出的初步针脚区域的图像进行开运算处理,以断开图像中针脚边缘与元件底座的粘连区域;s55、若图像信息中不存在合格的标示点,则直接进入步骤s56,若图像信息中存在合格的标示点,则借助标示点辅助定位针脚区域;s56、对初步针脚区域进行感兴趣区域框选,从而精确选出针脚区域;s57、提取步骤s56中获取的针脚区域图像的品质属性数据,并与预设的针脚区域模板图像的相关数据进行对比,当二者的相似度小于预设阈值时,则判定待测器件不合格并结束步骤s5,否则进入步骤s58;s58、针脚区域图像中的每个针脚亮斑区域对应一个针脚,对针脚区域图像中的每个针脚亮斑区域进行区域填充,然后再对填充完成后的每个针脚亮斑区域进行特征提取,并将提取的特征参数与预设的参数阈值进行对比,根据对比结果来判断待测器件是否合格。
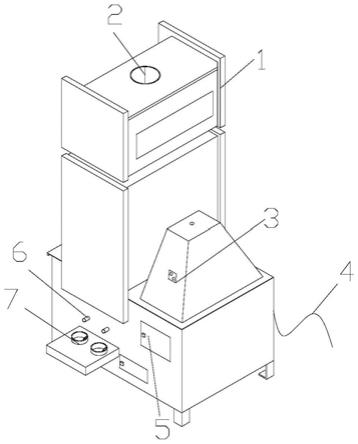
3.根据权利要求2所述的异型元器件的针脚检测方法,其特征在于,步骤s58具体包括:对每个针脚亮斑区域进行区域填充后,计算针脚亮斑区域总数量,并对每个针脚亮斑区域进行矩度测量、面积大小测量及中心坐标偏移量测量;若针脚亮斑区域总数量与预设的数量一致,且测得的每个针脚亮斑区域的距度、面积及中心坐标偏移量分别在预设的距度阈值、面积阈值及中心坐标偏移量阈值的范围内,则判定待测器件合格,否则判定待测器件不合格。4.根据权利要求3所述的异型元器件的针脚检测方法,其特征在于,步骤s2中,先判断工控机(1)内是否存储有与待测器件同类型的针脚区域模板数据,若是则选定相应的针脚区域模板,若否则根据如下步骤来重新设定针脚区域模板:对待测器件执行步骤s3与步骤s4,获取待测器件的针脚区域图像后,工作人员根据处理后的待测器件针脚区域图像进行人工判断,若人工判断待测器件合格,则工控机(1)储存该待测器件的相关数据,并依此建立新的针脚区域模板,再进入步骤s6,若判断待测器件不合格,则直接进入步骤s6。5.一种异型元器件的针脚检测装置,其特征在于,包括工控机(1)、运动控制系统(3)、图像采集系统(4)及夹持系统(5);所述工控机(1)分别与运动控制系统(3)、图像采集系统(4)及夹持系统(5)电连接,所述工控机(1)用于控制其他各系统的工作;所述夹持系统(5)安装在所述运动控制系统(3)上,所述夹持系统(5)用于夹持与放置待测器件,所述运动控制系统(3)用于带动所述夹持系统(5)在一定范围内运动;所述图像采集系统(4)用于采集待测器件的针脚区域图像,并将图像信息传输至所述工控机(1)进行处理;所述异型元器件的针脚检测装置根据权利要求1-4任一项所述的异型元器件的针脚检测方法来完成针脚检测。6.根据权利要求5所述的异型元器件的针脚检测装置,其特征在于,还包括基板(7),所述运动控制系统(3)固定安装在所述基板(7)上;所述图像采集系统(4)包括安装架(4.4)、工业相机(4.3)及线性激光光源(4.5);所述安装架(4.4)的底端固定在所述基板(7)上,所述安装架(4.4)的顶端中部用于作为待测器件的拍照位;所述线性激光光源(4.5)固定安装在所述安装架(4.4)的顶端,且从侧面正对着拍照位;所述工业相机(4.3)位于所述安装架(4.4)的底端,且从底面正对着拍照位。7.根据权利要求6所述的异型元器件的针脚检测装置,其特征在于,所述图像采集系统(4)还包括上料轨道(4.1)及光纤传感器(4.2),所述上料轨道(4.1)固定安装在所述安装架(4.4)上或通过支柱固定安装在所述基板(7)上;所述上料轨道(4.1)的入口端与外部的上料机构相配合,所述上料轨道(4.1)的出口端作为取料位,且所述光纤传感器(4.2)固定安装在取料位的一侧;所述光纤传感器(4.2)用于在检测到待测器件达到取料位时,将信息传输至工控机(1),所述工控机(1)进而通过所述运动控制系统(3)控制所述夹持系统(5)运动至取料位,以完成待测器件的夹持。8.根据权利要求7所述的异型元器件的针脚检测装置,其特征在于,所述夹持系统(5)
包括连接板(5.1)、下行气缸(5.2)、夹取气缸(5.3)及夹爪(5.4);所述连接板(5.1)与所述运动控制系统(3)的末端连接,所述下行气缸(5.2)固定在所述连接板(5.1)上,所述夹取气缸(5.3)位于所述下行气缸(5.2)的下方,所述夹爪(5.4)位于所述夹取气缸(5.3)的下方;所述下行气缸(5.2)用于控制下方的夹取气缸(5.3)及夹爪(5.4)的整体进行上下运动,所述夹取气缸(5.3)用于控制所述夹爪(5.4)完成夹持与放置待测器件的操作。9.根据权利要求8所述的异型元器件的针脚检测装置,其特征在于,所述图像采集系统(4)包括两个工业相机(4.3)、两个线性激光光源(4.5)、两个上料轨道(4.1)及多个光纤传感器(4.2),两个线性激光光源(4.5)分别位于拍照位的左右两侧,两个上料轨道(4.1)相互平行,两个工业相机(4.3)相互平行放置,且两个工业相机(4.3)分别对应于两个上料轨道(4.1)的出口端;所述夹持系统(5)包括两个下行气缸(5.2)、两个夹取气缸(5.3)及两个夹爪(5.4),以形成两套夹持件,且每套夹持件分别工作,当所述夹持系统(5)运动至取料位时,两套夹持件分别与两个上料轨道(4.1)的位置相对应。10.根据权利要求6所述的异型元器件的针脚检测装置,其特征在于,还包括集线器(2)与放置盒(6);所述工控机(1)与所述集线器(2)直接通过数据线连接,所述集线器(2)分别与所述图像采集系统(4)及运动控制系统(3)直接通过数据线连接,所述运动控制系统(3)与所述夹持系统(5)直接通过数据线连接;所述放置盒(6)固定安装在所述基板(7)上方。
技术总结
本发明公开了一种异型元器件的针脚检测方法及装置,其中装置包括工控机、运动控制系统、图像采集系统及夹持系统;工控机用于控制其他各系统的工作;夹持系统安装在运动控制系统上,夹持系统用于夹持与放置待测器件,运动控制系统用于带动夹持系统在一定范围内运动;图像采集系统用于采集待测器件的针脚区域图像,并将图像信息传输至工控机进行处理,工控机根据图像采集系统采集到的图像信息完成针脚检测。本发明大大减轻了工作人员的工作量,也提高了企业的经济效益,并且能够适应多种异型元器件的检测,检测的精度灵活可调,本发明可以灵活的配置在自动化产线上,契合未来智能工厂、无人产线等的建设。无人产线等的建设。无人产线等的建设。
技术研发人员:沈满德 黎文广 周利兵 万仁卓 张法全 廉祥 杨双 吴畏成
受保护的技术使用者:武汉纺织大学
技术研发日:2021.12.10
技术公布日:2022/4/26
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。