技术特征:
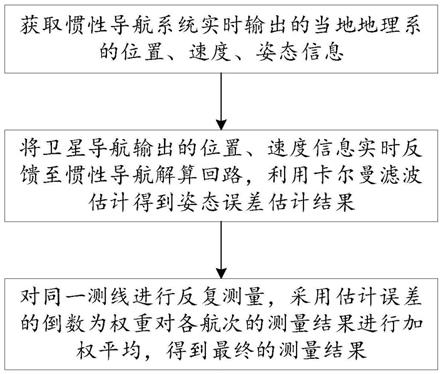
1.一种基于组合导航的矢量重姿态误差测量方法,所述组合导航为惯性/卫星组合导航,其特征在于,包括以下步骤:s1,获取惯性导航系统实时输出的当地地理系的位置、速度、姿态信息;所述地理系为以载体位置为原点,以当地地理北向为y轴、地理东向为x轴、地理天向为z轴的正交坐标系;s2,将卫星导航输出的位置、速度信息实时反馈至惯性导航解算回路,利用卡尔曼滤波估计得到姿态误差估计结果。2.根据权利要求1所述的方法,其特征在于,所述的利用卡尔曼滤波估计得到姿态误差估计结果,包括:利用当前时刻对应的状态转移矩阵以及前一时刻的状态向量得到当前时刻状态向量的预测结果;利用当前时刻对应的状态转移矩阵以及前一时刻协方差矩阵计算当前时刻协方差矩阵的预测结果;根据量测噪声向量、当前时刻协方差矩阵的预测结果以及量测矩阵计算卡尔曼滤波增益;利用当前时刻状态向量的预测结果、当前时刻测量得到的量测向量以及卡尔曼滤波增益计算当前时刻的状态向量。3.根据权利要求2所述的方法,其特征在于,所述当前时刻对应的状态转移矩阵根据惯性导航前一时刻与当前时刻的输出解算得到。4.根据权利要求2所述的方法,其特征在于,所述的利用卡尔曼滤波估计得到姿态误差估计结果,还包括:更新协方差矩阵,进入下一周期的滤波解算。5.根据权利要求4所述的方法,其特征在于,所述协方差矩阵更新方法如下式所示:p
k
=(i-k
k
h)p
k/k-1
式中,p
k
为k时刻协方差矩阵,i表示单位矩阵,k
k
表示k时刻卡尔曼滤波增益,h表示量测矩阵,p
k/k-1
为k时刻协方差矩阵预测结果。6.根据权利要求1所述的方法,其特征在于,还包括:s3,对同一测线进行反复测量,采用估计误差的倒数为权重对各航次的测量结果进行加权平均,得到最终的测量结果。7.一种基于惯性/卫星组合导航的矢量重力测量装置,其特征在于,包括:惯性导航系统、卫星导航系统、处理模块;所述处理模块用于获取惯性导航系统实时输出的当地地理系的位置、速度、姿态信息,将卫星导航输出的位置、速度信息实时反馈至惯性导航解算回路,利用卡尔曼滤波估计得到姿态误差估计结果。8.一种电子设备,其特征在于,包括:存储器,用于存储计算机软件程序;处理器,用于读取并执行所述计算机软件程序,进而实现权利要求1-6任一项所述的一种基于组合导航的矢量重姿态误差测量方法。9.一种非暂态计算机可读存储介质,其特征在于,所述存储介质中存储有用于实现权利要求1-6任一项所述的一种基于组合导航的矢量重姿态误差测量方法的计算机软件程序。
技术总结
本发明涉及一种基于组合导航的矢量重姿态误差测量方法及装置,所述组合导航为惯性/卫星组合导航,本发明实时获取惯性导航系统输出的当地地理系的位置、速度、姿态信息;将卫星导航输出的位置、速度信息实时反馈至惯性导航解算回路,利用卡尔曼滤波估计得到姿态误差估计结果。采用惯性导航、组合导航、滤波最优解估计等技术实现了全天时、全天候、全地形的快速高效矢量重力测量。为地理测绘、导航保障等实际需求提供了便捷、迅速的测量方式。迅速的测量方式。迅速的测量方式。
技术研发人员:肖胜 廖世康 王燕峰 王世博 李锋 刘炬扬
受保护的技术使用者:华中光电技术研究所(中国船舶重工集团公司第七一七研究所)
技术研发日:2021.12.07
技术公布日:2022/4/26
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。