1.本发明属于激光测距设备领域,尤其涉及一种单线激光雷达探头及激光雷达。
背景技术:
2.目前激光雷达对低反射率的材质的探测精度较差,在对低反射率探测时容易出现探测数据错误现象。且目前市场上的激光雷达及单线激光雷达探头在同一空间存在多台同类设备同时工作时,容易出现因相互干扰而出现不可预估的异常甚至失效的现象;
3.目前市场上有效探测距离8m以上的单线激光雷达探头,大部分已使用光学器件对激光视场角调制到
±
0.1
°
~
±2°
。其实际功耗均在0.3w以上,其主要功耗来自发射端激光光源。在无人机、扫地机、机器人等需要电池供电的设备,其功耗占比较大。
技术实现要素:
4.为了解决上述技术问题,本发明的目的之一在于提供一种结构简单,且测距精确度高且灵敏度佳的单线激光雷达探头。
5.为了实现上述目的,本发明的技术方案如下:一种单线激光雷达探头,包括壳体、激光发射模块和激光接收模块,所述壳体竖向设置,且其上端间隔凹设有第一安装孔和第二安装孔,所述激光发射模块嵌装在所述第一安装孔的内底部,其上端具有激光发射头,所述激光发射头用以向上发射激光光束,所述激光接收模块嵌装在所述第二安装孔的内底部,其上端具有激光接收探头,所述激光接收探头用以接收反射回来的激光光束,所述第一安装孔的孔口处设有光学组件,所述光学组件用以调节所述激光发射头所发射激光光束的光斑大小,所述第二安装孔的空口处设有滤光组件,所述滤光组件用以滤除干扰光线。
6.上述技术方案的有益效果在于:如此可利用光学组件对激光发射头所发出的激光光束的光斑大小进行调节,而滤光组件可避免可见光或及其他不需要的红外光进入到第二安装孔内以影响测量精度。
7.上述技术方案中所述光学组件为第一光学透镜、光栅组件、反射镜或光学棱镜中的一种或多种组合而成。
8.上述技术方案的有益效果在于:如此可根据需要灵活的对光学组件进行配置,以对激光发射头所发出的激光光束的光斑大小进行调整。
9.上述技术方案中所述滤光组件为滤光片或第二光学透镜。
10.上述技术方案的有益效果在于:其滤光效果好,且可根据需要滤除对测距精度存在影响的干扰光。
11.上述技术方案中所述第一安装孔内位于所述激光发射模块的上端水平设有第一吸光垫环,所述激光发射头位于所述第一吸光垫环的内孔处,所述第二安装孔内位于所述激光接收模块的上端水平设有第二吸光垫环,所述激光接收探头位于所述第二吸光垫环的内孔处。
12.上述技术方案的有益效果在于:如此可避免激光光束在第一安装孔和第二安装孔
内反射而导致测量精度降低甚至失效。
13.上述技术方案中所述第一安装孔和/或第二安装孔的横截面均为圆形,且其孔径由上向下逐渐减小或由两端向中部收腰至逐渐减小。
14.上述技术方案的有益效果在于:如此可对激光光束的发射角度进行收缩或增大,也可对部分光线进行准直。
15.上述技术方案中所述第一安装孔和第二安装孔的孔壁均涂布一层镜面涂层。
16.上述技术方案的有益效果在于:如此可提高第一安装孔和第二安装孔的反射性能,并且能够将反射回来的激光信号更有效地聚焦到激光接收模块,从而进一步的提高整个单线激光雷达探头的探测精度。
17.上述技术方案中还包信号解码及解调模块和信号加密及调制模块,所述激光发射模块与所述信号加密及调制模块电连接,所述信号加密及调制模块用以与外部控制器电连接,所述激光接收模块与所述信号解码及解调模块电连接,所述信号解码及解调模块用以与外部控制器电连接。
18.上述技术方案的有益效果在于:可通过信号解码模块中的带通滤波器对电信号进行除噪处理,同时可对脉冲信号的长度,每个脉冲周期的间隔、频率、占空比进行识别,以进一步的提高其精确度。
19.本发明的目的之二在于提供一种可360
°
测量的激光雷达。
20.本发明的另一技术方案如下:一种激光雷达,包括外部控制器和多个如上所述的单线激光雷达探头,多个所述单线激光雷达探头环向间隔均匀的设置,且多个所述单线激光雷达探头凹设有第一安装孔和第二安装孔的一端均相互背离,多个所述单线激光雷达探头均与所述外部控制器电连接。
21.上述技术方案的有益效果在于:如此可由多个单线激光雷达探头共用一个外部控制器,并共同组成一个可360
°
探测且探测精度高的激光雷达。
附图说明
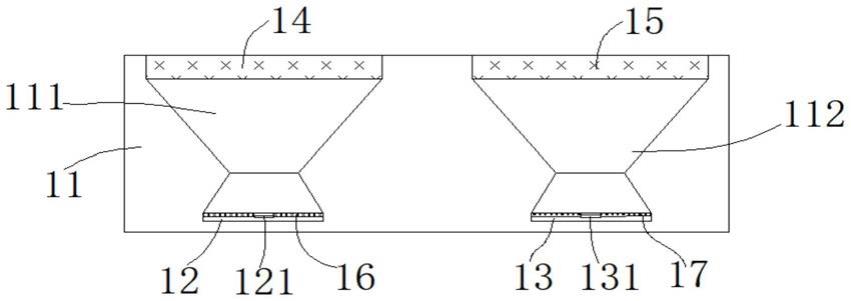
22.图1为本发明实施例1所述单线激光雷达探头的结构简图;
23.图2为本发明实施例1所述单线激光雷达探头的另一结构简图;
24.图3为本发明实施例1中所述激光光束在光学组件中的光路图;
25.图4为本发明实施例2中所述激光雷达的结构简图。
26.图5为本发明实施例1中激光接收模块及信号解码模块的电路连接图;
27.图6为本发明实施例1中激光发射模块及信号加密模块的电路连接图;
28.图中:1单线激光雷达探头、11壳体、111第一安装孔、112第二安装孔、12激光发射模块、121激光发射头、13激光接收模块、131激光接收探头、14光学组件、141光学透镜、142反射镜、143光栅组件、15滤光组件、16第一吸光垫环、17第二吸光垫环。
具体实施方式
29.以下结合附图对本发明的原理和特征进行描述,所举实例只用于解释本发明,并非用于限定本发明的范围。
30.实施例1
31.如图1或图2所示,本实施例提供了一种单线激光雷达探头,包括壳体11、激光发射模块12和激光接收模块13,所述壳体11竖向设置,且其上端间隔凹设有第一安装孔111和第二安装孔112,所述激光发射模块12嵌装在所述第一安装孔111的内底部,其上端具有激光发射头121,所述激光发射头121用以向上发射激光光束,所述激光接收模块13嵌装在所述第二安装孔112的内底部,其上端具有激光接收探头131,所述激光接收探头131用以接收反射回来的激光光束,所述第一安装孔111的孔口处设有光学组件14,所述光学组件14用以调节所述激光发射头121所发射激光光束的光斑大小,所述第二安装孔112的空口处设有滤光组件15,所述滤光组件15用以滤除干扰光线,如此可利用光学组件对激光发射头所发出的激光光束的光斑大小进行调节,而滤光组件可避免可见光或及其他不需要的红外光进入到第二安装孔内以影响测量精度。其中,激光发射模块和激光接收模块均为现有技术,在此不作赘述。
32.上述技术方案中所述光学组件14为第一光学透镜、光栅组件、反射镜或光学棱镜中的一种或多种组合而成(形成光路以将激光光束经常处理后射出),如此可根据需要灵活的对光学组件进行配置,以对激光发射头所发出的激光光束的光斑大小进行调整,其中第一光学透镜可以是凸透镜、凹透镜、tir透镜或菲涅尔透镜,具体如图3所示,所述光学组件14可由第一光学透镜141、反射镜142和光栅组件143共同组成。
33.上述技术方案中所述滤光组件15为滤光片或第二光学透镜(凸透镜、凹透镜、tir透镜或菲涅尔透镜),当然优选的为滤光片,其滤光效果好,且可根据需要滤除对测距精度存在影响的干扰光。
34.上述技术方案中所述第一安装孔111内位于所述激光发射模块12的上端水平设有第一吸光垫环16,所述激光发射头121位于所述第一吸光垫环16的内孔处,所述第二安装孔112内位于所述激光接收模块13的上端水平设有第二吸光垫环17,所述激光接收探头131位于所述第二吸光垫环17的内孔处,如此可避免激光光束在第一安装孔和第二安装孔内反射而导致测量精度降低。
35.上述技术方案中所述第一安装孔111的横截面均为圆形,且所述第一安装孔111的孔径由上向下逐渐减小或所述第一安装孔111的孔径由两端向中部收腰至逐渐减小,如此可对激光光束的发射角度进行收缩或增大。也可对部分光线进行准直。
36.其中,第一安装孔和第二安装孔的孔内壁可涂布一层镜面涂层以提高其对激光光束的反射效果,另外所述第二安装孔的孔径也可由上向下逐渐减小或所述第二安装孔的孔径由两端向中部收腰至逐渐减小。
37.上述技术方案中还包信号解码及解调模块和信号加密及调制模块,所述激光发射模块12与所述信号加密及调制模块电连接,所述信号加密及调制模块用以与外部控制器电连接,所述激光接收模块13与所述信号解码及解调模块电连接,所述信号解码及解调模块用以与外部控制器电连接,通过信号解码模块中的带通滤波器对电信号进行除噪处理,以进一步的提高其精确度。
38.如图5所示,所述信号解码及解调模块包括前置放大电路、自动增益控制电路、第一控制电路、带通滤波器和解调电路,其中,前置放大电路和自动增益控制电路用于对激光接收模块转换出来的电信号进行放大;带通滤波器用于将放大后的信号进行滤波,其可以过滤掉来自阳光背景和其他灯光产生干扰信号;解调电路将把带通滤波器输出的信号调制
成发射端发出的加密脉冲信号。
39.如图6所示,所述信号加密及调制模块包括第二控制电路、信号发生器电路和调制模块电路,其中,信号发生器电路可自主产生脉冲信号,第二控制电路和调制模块电路可控制信号发生器产生脉冲信号长度及每个脉冲周期的间隔、频率及占空比。
40.增益效果及测试条件:
41.在第一安装孔(111)和第二安装孔(112)最大直径10mm且均未使用任何光学组件及滤光片的条件下,使用额定功耗0.2w、额定辐射强度65mw/sr中心波长940nm的激光光源,激光发射端电压1.7v,限流电阻15kr,即激光光源最大功耗约0.11mw,有效视场角度
±8°
,接收模块最低响应辐照度0.12mw/m2时,对反射率70%的物体有效探测距离达65cm,黑色abs电脑机箱及普通透明玻璃(反射率10%左右)有效探测距离达55cm,对黑色毛毯(反射率3%左右)有效探测距离达40cm,对直径6mm白色十字螺丝刀刀杆的有效探测距离为45cm;在将限流电阻改为1.5kr,即激光光源最大功耗约1.1mw时,对反射率70%的物体有效探测距离达8m,对普通透明玻璃(反射率10%左右)有效探测距离达7m。
42.实施例2
43.如图4所示,本实施例提供了一种激光雷达,包括外部控制器和多个如实施例1所述的单线激光雷达探头1,多个所述单线激光雷达探头1环向间隔均匀的设置,且多个所述单线激光雷达探头1设有第一安装孔111和第二安装孔112的一端均相互背离,多个所述单线激光雷达探头1均与所述外部控制器连接,如此可由多个单线激光雷达探头共同组成一个可360
°
探测且探测精度高的激光雷达,其中,所述单线激光雷达探头的个数是不低于四个,具体个数可根据单个激光发射模块12覆盖的范围自行设计,此时多个单线激光雷达探头相对静止,且其测距范围围合形成360
°
区域。
44.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。