技术特征:
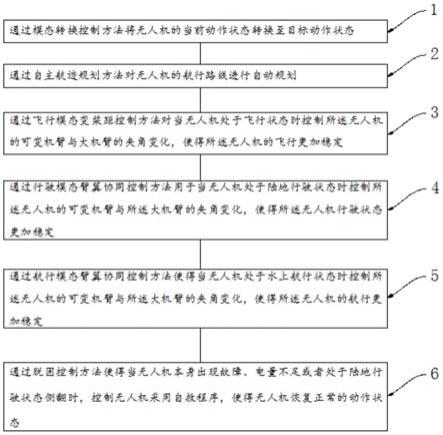
1.一种海陆空三用无人机的控制方法,其特征在于,所述控制方法包括:通过模态识别方法识别所述无人机的动作状态;所述动作状态包括:飞行状态、水上航行状态和陆地行驶状态;通过模态转换控制方法将无人机的当前动作状态转换至目标动作状态;通过自主航迹规划方法对无人机的航行路线进行自动规划;通过飞行模态变桨距控制方法对当无人机处于飞行状态时控制所述无人机的可变机臂与大机臂的夹角变化,使得所述无人机的飞行更加稳定;通过行驶模态臂翼协同控制方法用于当无人机处于陆地行驶状态时控制所述无人机的可变机臂与所述大机臂的夹角变化,使得所述无人机行驶状态更加稳定;通过航行模态臂翼协同控制方法使得当无人机处于水上航行状态时控制所述无人机的可变机臂与所述大机臂的夹角变化,使得所述无人机的航行更加稳定;通过脱困控制方法使得当无人机本身出现故障、电量不足或者处于陆地行驶状态侧翻时,控制无人机采用自救程序,使得无人机恢复正常的动作状态。2.根据权利要求1所述的海陆空三用无人机的控制方法,其特征在于:通过所述模态识别方法识别所述无人机的动作状态包括,依据接收的所述水浸传感器传递的浸水信号,判断所述无人机的动作状态,具体条件如下:s1,若水浸传感器未传回浸水信号,且80
°
≤β-α≤100
°
,则判断无人机处于空中飞行工作模态;所述β为可变机翼与大机臂之间的角度;所述α为大机臂与机体水平面之间的角度;s2若水浸传感器未传回浸水信号,且170
°
≤α β≤190
°
,则判断无人机处于地面行驶工作模态;s3若水浸传感器传回浸水信号,且170
°
≤α β≤190
°
,则判断无人机处于水面航行工作模态;s4若传回的角度信息α、β不满足80
°
≤β-α≤100
°
,或不满足170
°
≤α β≤190
°
,则控制器判断机臂转动角度故障,设置故障代码e0;s5控制控中的寄存器记录工作模态信息。3.根据权利要求1所述的海陆空三用无人机的控制方法,其特征在于,所述模态转换控制方法包括:依据无人机的当前动作状态切换至目标动作状态,若无人机的所述当前动作状态为飞行模态,且所述目标动作状态为行驶模态,则通过如下步骤进行切换:a1控制板确定当前工作模态为飞行模态,判断是否达到路径规划转换时机;a2则飞行器降高、降速,直至万向轮触地;a3降落后电调停机,螺旋桨停止转动;a4步进电机带动转轴一转动,进而调整-5
°
≤α≤5
°
;a5步进电机带动转轴二转动,进而调整175
°
≤β≤185
°
;a6控制板控制电调启动,螺旋桨与可变机臂按照行驶模态臂翼协同控制方法控制无人机地面行驶;若无人机的所述当前动作状态为行驶模态,且所述目标动作状态为飞行模态,则通过如下步骤进行切换,则通过如下步骤进行切换:b1控制板确定当前工作模态为行驶模态,判断是否达到路径规划转换时机;b2无人机通过行驶模态臂翼协同控制方法寻找坡度不高于5
°
的地面停车;
b3步进电机带动转轴二转动,进而调整130
°
≤β≤140
°
;b4步进电机带动转轴一转动,进而调整40
°
≤α≤50
°
;b5控制板通过传感器复检旋翼转轴是否与机体水平面垂直,若垂直,满足起飞条件,若不满足则继续调整角度,使其满足;b6控制板控制电调启动,螺旋桨与可变机臂按照飞行模态变桨距控制方法控制无人机空中飞行。4.根据权利要求1所述的海陆空三用无人机的控制方法,其特征在于,所述模态转换控制方法包括:依据无人机的当前动作状态切换至目标动作状态,若无人机的所述当前动作状态为飞行模态,且所述目标动作状态为航行模态,则通过如下步骤进行切换:c1控制板确定当前工作模态为飞行模态,判断是否达到路径规划转换时机;c2则飞行器降高、降速,直至机体下部触水漂浮;c3控制板控制电调停机,螺旋桨停止转动;c4步进电机带动转轴一转动,进而调整-45
°
≤α≤-35
°
;c5步进电机带动转轴二转动,进而调整175
°
≤β≤185
°
;c6机臂角度调整后,确保螺旋桨整体进入水面下方;c7控制板控制电调启动,螺旋桨与可变机臂按照航行模态臂翼协同控制方法控制无人机海面行驶;若无人机的所述当前动作状态为航行模态,且所述目标动作状态为飞行模态,则通过如下步骤进行切换:d1控制板确定当前工作模态为飞行模态,判断是否达到路径规划转换时机;d2无人机按照航行模态臂翼协同控制方法,使无人机在海面停车;d3步进电机带动转轴二转动,进而调整130
°
≤β≤140
°
;d4步进电机带动转轴一转动,进而调整40
°
≤α≤50
°
;d5无人机暂停动作1—10分钟,至机臂及旋翼上粘黏的液体完全蒸发;d6控制板控制电调启动,螺旋桨与可变机臂按照飞行模态变桨距控制方法控制无人机空中飞行。5.根据权利要求1所述的海陆空三用无人机的控制方法,其特征在于,所述模态转换控制方法包括:依据无人机的当前动作状态切换至目标动作状态,若无人机的所述当前动作状态为飞行模态,且所述目标动作状态为行驶模态,则通过如下步骤进行切换:e1按照航行模态转换为飞行模态的方法将无人机从航行模态转换为飞行模态;e2按照飞行模态转换为行驶模态的方法将无人机从飞行模态转换为行驶模式;若无人机的所述当前动作状态为行驶模态,且所述目标动作状态为飞行模态,则通过如下步骤进行切换:f1按照行驶模态转换为飞行模态的方法将无人机从行驶模态转换为飞行模态;f2按照飞行模态转换为航行模态的方法将无人机从飞行模态转换为航行模式。6.根据权利要求1所述的海陆空三用无人机的控制方法,其特征在于:所述自主航迹规划方法用于对无人机的航行路线进行自动规划,所述自主航迹规划方法包括:g1、确定起始地与目的地,分析航程距离与路径中的地理环境;
g2、若航程距离
×
2<无人机飞行续航最大距离,则采用全程飞行模态完成行动任务;g3、若航程距离<无人机的飞行续航最大距离<航程距离
×
2,则采用全程飞行模态配合目的地充电模式完成行动任务,即从起始地到目的地全过程采用飞行模态工作,飞抵目的地后降落,并进入充电模式利用太阳能补充电能,电能补充完毕后起飞返航;g5、若航程距离远大于无人机的续航最大距离,则进一步判断直线飞行路程中是否经过水面,若存在水面,则可令无人机在水面以航行模态臂翼协同控制方法进行航行,且在航行过程中利用太阳能对电池电能进行补充,根据需求亦可在水面停车,利用太阳能补充电池储存电能,直至抵达目的地并根据需要返程;其中,若直线飞行路程中没有经过水面,则可令无人机在陆地以行驶模态臂翼协同控制方法进行行驶,且在行驶过程中利用太阳能对电池电能进行补充,根据需求亦可在陆地停车,利用太阳能补充电池储存电能;地面行驶条件不好时,可转换为飞行模态越障至地形较好处降落继续地面行驶,直至抵达目的地并根据需要返程。7.根据权利要求1所述的海陆空三用无人机的控制方法,其特征在于:所述通过飞行模态变桨距控制方法控制当无人机处于飞行状态时控制所述无人机的可变机臂与大机臂的夹角变化,使得所述无人机的飞行更加稳定;所述飞行模态变桨距控制方法包括:h1、常规飞行工作模态时,螺旋桨旋转面与机体纵轴垂直,大机臂与机身水平面夹角α为45
°
,可变机臂与大机臂夹角β为135
°
,在变桨距飞行控制方法中,大机臂与机身水平面夹角α保持不变,输入量为可变机臂与大机臂夹角β,设135
°
为飞行模态参考角度,实际δβ=β-135
°
,v为无人机的平飞速度,h为无人机的飞行高度,设置δβ,v,h为变桨距飞行模态的输入信号量;h2、根据不同的飞行器,通过模拟飞行时及飞行实验时有气动参数得到气动模型,设置不同的飞行性能目标,构建不同飞行参数无人机的变桨距控制量c与v、h、δβ之间的关系,此关系可通过神经网络迭代计算得到;h3、建立不同无人机变桨距控制方程,c=f(v、h、δβ);h4、将计算得出变桨距螺旋桨的输出量(桨距的变化量)通过变桨距电机实施在无人机螺旋桨上,得以实现能效更高的飞行动态过程。8.根据权利要求1所述的海陆空三用无人机的控制方法,其特征在于,所述行驶模态臂翼协同控制方法用于当无人机处于陆地行驶状态时控制所述无人机的可变机臂与所述大机臂的夹角变化,使得所述无人机行驶状态更加稳定;所述行驶模态臂翼协同控制方法包括:i1、通过模态识别方法判断此时是否处于地面行驶工作模态,若处于地面行驶工作模态,则可开启行驶模态臂翼协同控制流程;i2、将机臂顺时针编号为一、二、三、四,设置一、二号机臂为拉动臂,提供拉力,三四号机臂为推进臂,提供推力;i3、一号机臂中的可变机臂在水平方向以轴体二为中心转动角顺时针旋转45
°
,即设置β=45
°
,二号机臂中的可变机臂在水平方向以轴体二为中心转动角逆时针旋转45
°
,即设置β=-45
°
,一号机臂旋翼叶片平面与二号机臂旋翼叶片平面为同一平面;i4、三号机臂中的可变机臂在水平方向以轴体二为中心转动角顺时针旋转45
°
,即设置
β=45
°
,四号机臂中的可变机臂在水平方向以轴体二为中心转动角逆时针旋转45
°
,即设置β=-45
°
,三号机臂旋翼叶片平面与四号机臂旋翼叶片平面为同一平面;i5、可采用前驱驱动、后驱驱动和四驱模式三种前进模式:所述前驱驱动:仅由一二号机臂旋翼正转产生的拉力带动无人机前进;所述后驱驱动:仅由三四号机臂旋翼反转产生的推力带动无人机前进;所述四驱模式:由一二号机臂旋翼正转产生的拉力与三四号机臂旋翼反转产生的推力共同作用带动无人机前进;无人机的转向控制,通过调整同侧机臂的δγ的值,即同时调整推进臂或拉动臂的δγ,且转向一致、大小相同,来带动无人机地面行驶时的转向。9.根据权利要求1所述的海陆空三用无人机的控制方法,其特征在于,所述航行模态臂翼协同控制方法用于当无人机处于水上航行状态时控制所述无人机的可变机臂与所述大机臂的夹角变化,使得所述无人机的航行更加稳定;所述航行模态臂翼协同控制方法包括:j1、通过模态识别方法判断此时是否处于水面航行工作模态,若处于水面航行工作模态,则可开启航行模态臂翼协同控制流程;j2、将机臂顺时针编号为一、二、三、四,设置一、二号机臂为拉动臂,提供拉力,三四号机臂为推进臂,提供推力;j3、一号机臂中的可变机臂在水平方向以轴体二为中心转动角顺时针旋转45
°
,即设置δγ1=45
°
,二号机臂中的可变机臂在水平方向以轴体二为中心转动角逆时针旋转45
°
,即设置δγ2=-45
°
,一号机臂旋翼叶片平面与二号机臂旋翼叶片平面为同一平面;j4、三号机臂中的可变机臂在水平方向以轴体二为中心转动角顺时针旋转45
°
,即设置δγ3=45
°
,四号机臂中的可变机臂在水平方向以轴体二为中心转动角逆时针旋转45
°
,即设置δγ4=-45
°
,三号机臂旋翼叶片平面与四号机臂旋翼叶片平面为同一平面;j5、可采用前驱驱动、后驱驱动和四驱模式三种前进模式;所述前驱驱动:仅由一二号机臂旋翼正转产生的拉力带动无人机前进;所述后驱驱动包括:仅由三四号机臂旋翼反转产生的推力带动无人机前进;所述四驱模式包括:由一二号机臂旋翼正转产生的拉力与三四号机臂旋翼反转产生的推力共同作用带动无人机前进;j6、无人机的转向控制,通过调整同侧机臂的δγ的值,即同时调整推进臂或拉动臂的δγ,且转向一致、大小相同,来带动无人机水面航行时的转向。10.根据权利要求8所述的海陆空三用无人机的控制方法,其特征在于:所述脱困控制方法用于当无人机本身出现故障、电量不足或者处于陆地行驶状态侧翻时,控制无人机采用自救程序,使得无人机恢复正常的动作状态;所述脱困控制方法包括:k1、当无人机自身电量低于百分之二十时,此时无人机控制板进行模态识别,若识别自身处于水面航行或地面行驶工作模态,则就地停车,太阳能电池板进行充电,若识别自身处于空中飞行工作模态,则进行模态转换动作,调整为地面行驶状态或海面航行状态,然后停车,太阳能电池板进行充电;k2、地面行驶工作模态若因地形问题导致侧翻,则无人机可进行模态转换动作,将地面行驶工作模态转换为空中飞行工作模态,并起飞,将侧翻的姿态调整成飞行姿态,短暂拉起机身越障后转换为地面行驶工作模态,继续工作;k3、e0报错的故障时,无人机自动重启,恢复初始状态,继续检测机臂角度能否达标,若依然不符合标准,则判断无人故障,不具备执行行动任务;若无人机在行动任务过程中出线
e0故障,且通过重启恢复初始状态依然无法解决该故障,则无人机向控制中心发出呼救信号,并传输位置信号,等待控制中心救援。
技术总结
本发明提供一种海陆空三用无人机的控制方法,所述无人机包括:旋翼、可变机臂、大机臂、机体、起落架、万向轮和控制器;旋翼包括旋翼叶片、旋翼转轴、伺服系统;伺服系统包括电子调速器、电机,大机臂包括转轴一;旋翼通过旋翼转轴安装在可变机臂一端,可变机臂的另一端与大机臂的一端通过转轴连接,大机臂另一端通过转轴一与机体连接,机体内部设置控制器,机体下方对称设置至少一对起落架,起落架下方安装万向轮,机体为发泡防水材料制备。可广泛应用于飞行器技术领域。行器技术领域。行器技术领域。
技术研发人员:雷安旭 詹志明 董蕴源
受保护的技术使用者:江汉大学
技术研发日:2021.10.26
技术公布日:2022/4/26
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。