用于使平面外感测加速度计偏移最小化的微机电系统结构
1.优先权请求
2.本技术主张于2020年4月7日所提交的题为“用于使平面外感测加速度计偏移最小化的微机电系统结构(mems structure for offset minimization of out-of-plane sensing accelerometers)”的美国非临时申请序列号16/842,619的优先权,该美国非临时申请序列号16/842,619是2019年11月4日提交的题为“偏移抑制电极(offset rejection electrodes)”的美国专利申请序列号16/673,602的部分继续申请并要求其优先权,该美国专利申请序列号16/673,602是2018年3月8日提交的题为“偏移抑制电极(offset rejection electrodes)”的美国专利申请序列号15/916,105(现为美国专利第10,466,268号)的继续申请,该美国专利申请序列号15/916,105是2015年5月15日提交的题为“偏移抑制电极(offset rejection electrodes)”的美国专利申请序列号14/714,149(现在是美国专利第9,952,252号)的分案申请。此外,本专利申请主张于2020年4月7日提交的题为“用于使平面外感测加速度计的偏移最小化的微机电结构(mems structure for offset minimization of out-of-plane sensing accelerometers)”的美国非临时申请序号16/842,619和2019年9月11日提交的题为“用于使平面外感测加速度计的偏移最小化的微机电结构(mems structure for offset minimization of out-of-plane sensing accelerometers)”的美国临时专利申请序号62/898,887的优先权。本技术也与2017年5月31日提交的美国专利申请序列号15/609,757(现为美国专利第10,295,558号)有关,该美国专利申请序列号15/609,757是2015年5月15日提交的题为“偏移抑制电极(offset rejection electrodes)”的美国专利申请序列号14/714,149(现在是美国专利第9,952,252号)的部分继续申请。上述申请的全部内容通过参考而纳入本文。
技术领域
3.所揭露的主题涉及微机电系统(microelectromechanical system;mems)感测器,更具体地说,是涉及利用偏移抑制电极(offset rejection electrode)的微机电系统感测器。
背景技术:
4.微机电系统(mems)感测器会经受各种不期望的力,这些力可能来自微机电系统/互补金属氧化物半导体(cmos)管芯的制造、管芯的封装、在温度下的操作、冲击条件(shock condition)、用户组装以及其他许多因素。这些力会导致非理想条件,如微机电系统感测器和嵌入式感测参考平面之间的平行对准偏差。
5.微机电系统加速度计的偏移最小化和衬底变形抑制通常通过微机电系统感测器设计考量(例如,锚设计(anchor design)、锚放置(anchor placement)、电极放置和图案、工艺改进等)来解决。然而,微机电系统加速度计的偏移稳定性是一项关键的挑战,由于所有市场细分(如消费者、汽车、工业等)的规格限制都在紧缩,而且压力测试也变得更加激进。例如,需要对于不同类型的外部负载(如温度、应变等)改善偏移稳定性,以便在现有市
场上实现新应用,或使基于微机电系统的惯性感测器适用于新的市场细分。
6.因此期望提供改进这些与其他缺点的微机电系统感测器。以上所描述的缺点仅是为了提供对传统实施方式的一些问题的概述,并非是详尽无遗。传统实施方式和技术的其他问题,以及在此描述的各个态样的相应益处,在阅读以下描述后会更加了解。
技术实现要素:
7.以下呈现了对本说明书的简化概要,以提供对本说明书的基本理解。此概要不是对说明书的广泛概述,它的目的不是为了确定说明书的关键或重要内容,也不是为了划定说明书的任何实施方案的特定范围,或权利要求的任何范围。它的唯一目的是以简化的形式呈现规范的一些概念,作为稍后以呈现更详细描述。
8.本发明揭露一种用于减少微机电系统感测器中的偏移的系统和方法。在第一态样中,该系统是微机电系统感测器,其包括感测参考平面、耦合到感测参考平面相的至少一个锚、耦合到至少一个锚的至少一个检测质量,其中至少一个检测质量中的一个在外部激励下移动,一图案的感测元件耦合于感测参考平面与至少一检测质量之间,以检测垂直于感测参考平面的运动,其中该图案的感测元件共享至少三个极性反对称轴,以及一信号处理电路用以组合该图案的感测元件,从而提供与外部激励成比例的输出。
9.在第二态样中,感测参考平面被两个轴划分,在感测参考平面上形成四个象限,并且该图案的感测元件在四个象限的每个象限中包括至少三个感测元件。
10.在第三态样中,一种方法提供如上述第一和第二态样所述的微机电系统感测器。
11.在另一个非限制性态样中,进一步的非限制性实施例提供示例性微机电系统结构和设备,其特征在于一个或多个具有关于与弹簧或弹性耦合轴正交的轴对称的感测微机电系统结构、与电极图案的其中一个对称轴对齐的弹簧或弹性耦合轴、不同数量的参考电极和感测电极、具有至少两个对称轴(其中一个沿着弹簧或弹性耦合的轴)的参考微机电系统结构和/或在弹簧或弹性耦合轴下方的参考结构。
12.下面将更详细地描述这些和其他实施例。
附图说明
13.参照附图进一步描述各种非限制性实施例,其中:
14.图1图示了根据实施例的理想和非理想微机电系统感测器条件的横截面图;
15.图2a图示了具有根据实施例的具有一图案的感测元件的微机电系统感测器的衬底部分的横截面图;
16.图2b示出了根据实施例的具有一图案的感测元件的微机电系统感测器的衬底部分的俯视图;
17.图2c示出了根据实施例的微机电系统感测器的微机电系统装置;
18.图3a示出了根据另一实施例的具有一图案的感测元件的微机电系统感测器和对应的微机电系统结构的俯视图;
19.图3b示出了根据实施例的使用电极图案的微机电系统感测器的微机电系统加速度计结构;
20.图4示出了根据另一实施例的具有一图案的感测元件的微机电系统感测器的俯视
图;
21.图5示出了根据另一实施例的具有一图案的感测元件的微机电系统感测器的俯视图;
22.图6示出了根据另一实施例的具有一图案的感测元件的微机电系统感测器的俯视图;
23.图7描绘了针对如本文所述的示例性微机电系统设备的参考微机电系统结构的另一个非限制性实施例的各个态样;
24.图8描绘了针对另一示例性实施例的感测微机电系统结构的进一步非限制性态样;
25.图9描绘了针对根据本文所述的示例性实施例的示例性弹性耦合的进一步非限制性态样;
26.图10描绘了针对如本文所述的示例性设备的感测电极的非限制性实施例的各个态样;
27.图11显示了针对示例性设备的参考电极的非限制性实施例的进一步态样;
28.图12描绘了如本文所述的示例性设备的进一步非限制性态样;
29.图13显示了针对电极配置的示例性设备的进一步非限制性态样;
30.图14描绘了根据本文所述的进一步非限制性实施例的示例性参考微机电系统结构的各个态样;
31.图15描绘了根据其他非限制性实施例的示例性微机电系统感测结构的进一步非限制性态样;以及
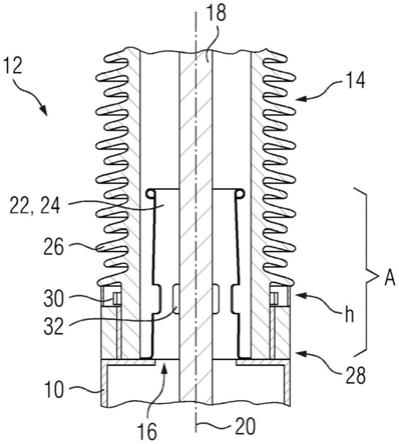
32.图16描绘了根据本文所述的各个态样的倾斜z轴平面外感测微机电系统加速度计的示例性实施例。
具体实施方式
33.虽然提供了简要的概述,但在此描述或描绘本公开的某些态样是为了说明而不是限制。因此,由所揭露的设备、系统和方法所建议的公开实施例的变体旨在被包含在本文所揭露的主题范围之内。呈现以下的描述是为了使本领域的普通技术人员能够制造和使用各种公开的实施例,并且是在专利申请及其要求的背景下提供。对优选实施例和本文所描述的通用原理和特征的各种修改,对于本领域的技术人员来说是很容易看出来的。因此,所公开的主题并不打算局限于所示的实施例,而是要符合与本文所述的原理和特征一致的最宽范围。
34.微机电系统(mems)指的是使用类似半导体工艺制造的一类微尺度装置,并表现出诸如移动或变形的能力之类的机械特性。微机电系统经常(但并非总是)与电信号相互作用。微机电系统装置可以指实现为微机电系统的半导体装置。微机电系统装置包括机械元件,并且可选地包括用于感测的电子元件。微机电系统装置包括但不限于微尺度陀螺仪、加速计、磁力计和压力感测器。
35.在一个实施例中,一微机电系统感测器包括一微机电系统装置、一感测参考平面、以及将微机电系统装置连接到感测参考平面的锚。在微机电系统感测器的制造和操作过程中,微机电系统感测器可能会经受到不期望的力。这些不期望的力包括但不限于来自微机
电系统/互补金属氧化物半导体芯片的制造和封装、在超温度下的操作、冲击条件和用户组装的应力,这些应力都会导致非理想的条件,如微机电系统装置和感测参考平面之间的平行对准(parallel alignment)的偏差。
36.在微机电系统装置和感测参考平面之间的平行对准中存在至少两个独立的不期望偏差。首先,锚上的剪切力导致该锚相对于感测参考平面倾斜。其次,弯曲力导致感测参考平面相对于微机电系统装置弯曲。因此,感测参考平面和微机电系统装置之间的间隙z(x,y)随x和y位置而变化,并且根据以下等式从锚中心描述为线性函数和非线性曲率分量:
37.z(x,y)=gap r(x,y) curv(nl(x,y));其中gap=理想的初始平行间隙,r(x,y)是旋转,curv(nl(x,y))是曲率(curvature)的数学描述,可以是多项式、三角级数、幂级数或类似的非线性函数或级数。
38.图1图示了根据一个实施例的理想和非理想微机电系统感测器条件的横截面图100。在一个实施例中,该微机电系统感测器至少包括微机电系统装置、感测参考平面、和将微机电系统装置耦合到感测参考平面的锚。在图100中,理想条件102显示微机电系统装置和感测参考平面之间的平行对准。在图100中,第一非理想条件104显示了由于至少一个表面(如图所示的微机电系统装置和/或感测参考平面)的不期望的线性倾斜而导致的平行对准偏差。在图100中,第二非理想条件106显示了由于至少一个表面(如图所示的感测参考平面和/或微机电系统装置)的不期望的曲率而导致的平行对准偏差。
39.根据所公开的主题的系统及方法提供具有感测参考平面的微机电系统感测器,该感测参考平面包括一图案的感测元件(电极)以改善偏移抑制。该图案的感测元件可以是多个电极图案,以减少因微机电系统装置与感测参考平面之间的平行对准的偏差而造成的偏移。感测参考平面通过锚连接到微机电系统装置。微机电系统装置包括连接于锚和检测质量(proof mass)之间的弹簧。多个电极图案中的每个电极皆位于诸如互补金属氧化物半导体衬底的感测参考平面上。在微机电系统装置/互补金属氧化物半导体衬底管芯配置中,检测质量和位于互补金属氧化物半导体衬底(或感测参考平面)上的多个电极其中之一形成一平行板电容器。
40.为了更详细地描述所揭露主题的特征,现在请参考以下结合附图的描述。
41.图2a示出了具有根据一实施例的具有一图案的感测元件的微机电系统感测器的衬底部分的截面图202的图200。该截面图202显示了包括微机电系统装置250的微机电系统感测器,该微机电系统装置250透过锚210耦合到感测参考平面260,从而在微机电系统装置250和感测参考平面260之间产生间隙。在截面图202中,aa描绘了感测参考平面260的高度。在一个实施例中,该微机电系统装置250是微机电系统结构和微机电系统加速度计中的任一种。
42.图2b示出了根据一实施例的具有一图案的感测元件的微机电系统感测器的衬底部分的俯视图204的图270。该俯视图204显示了aa的俯视图,其导致包括正电极和负电极的该图案的感测元件的顶面。该俯视图204包括微机电系统感测器的锚210、正电极220、222、224和226、负电极230、232、234和236、以及由虚线表示的四个极性反对称轴240、242、244和246。在图2a和图2b中,锚210的形状是圆形,以对应于也是圆形的该图案的感测元件的形状。
43.在一个实施例中,微机电系统装置250包括连接于锚210和检测质量之间的弹簧。
在一外力作用下,检测质量在z轴上移动,该外力包括但不限于加速度、磁力、科里奥利力(coriolis)、压力和许多其他外力。该图案的感测元件包括交替的正电极和负电极220-226和230-236,并连接在微机电系统装置250和感测参考平面260之间。正电极感测元件220-226检测正向运动,负电极感测元件230-236检测负向运动。在一个实施例中,电极感测元件220-226和230-236的形状是环形扇区。
44.图2c图示了根据一实施例的微机电系统感测器的微机电系统装置。在图2c中,微机电系统装置类似于图2a的微机电系统装置250,并且是微机电系统z轴加速度计。在一个实施例中,该微机电系统装置250进一步包括,第一组弹簧(260-263)和第二组弹簧(270-273)、感测质量280-283、和检测质量290。该感测质量280-283分别透过第二组弹簧270-273连接到锚210。该感测质量280-283分别透过第一组弹簧260-263连接到检测质量290。感测质量280-283分别由正电极220、222、224、226以及负电极230、232、234、236分别检测。
45.在一个实施例中,该微机电系统装置250在正( )z轴平面外加速度(out-of-plane acceleration)下导致检测质量290在负(-)z轴方向移动。偏转的检测质量290推动第一组弹簧260-263,从而使感测质量280-283分别围绕第二组弹簧270-273旋转。这导致正电极220、222、224和226与每个感测质量280-283之间的间隙减小,并且也导致了负电极230、232、234和236与感测质量280-283之间的间隙增大。
46.在一实施例中,在非理想条件下的该微机电系统装置250的行为类似于微机电系统装置104和106所描述的平板一样。电极图案204具有感测微机电系统装置250在z轴加速度下的偏转特性,但也拒绝图1中微机电系统装置104和106所描述的微机电系统装置250的非理想运动。
47.在本实施例中,该电极感测元件220-226和230-236形成差动感测架构(differential sensing scheme)。例如,该差动感测架构使在感测元件220、222、224和226上方的间隙减少,在感测元件230、232、234和236上方的间隙增加。因此,仅当每对正电极感测元件220-226和负电极感测元件230-236与微机电系统装置250之间的间隙由于检测质量的移动而改变时才检测到运动。因此,使用该图案的感测元件(电极)的差动架构,该检测质量以引起可检测的运动的路径中移动。每个感测元件220-226和230-236的中心与锚210的中心具有共同的距离。如前所述,感测元件220-226和230-236有四个极性反对称轴240-246。在另一个实施例中,该图案的感测元件被设计成有三个或更多的对称轴。
48.在图2b的俯视图204中,正感测元件(电极)220-226中的每一个具有与对应的负感测元件(电极)230-236相同的从锚中心到电极中心的距离。因此,在该轴的两侧有任何相同的移动都会导致正和负电极有相等的间隙移动,因为当正和负电极一起移动时,不会产生净输出。
49.因此,垂直于轴240,该负感测元件236具有与该正感测元件222相同的距离(因此电极236与垂直于轴240的电极222相对应),该负感测元件230具有与该正感测元件220相同的距离(因此电极230与垂直于轴240的电极220相对应),该负感测元件232具有与该正感测元件226相同的半径(因此电极232与垂直于轴240的电极226相对应),并且该负感测元件234具有与该正感测元件224相同的距离(因此电极234与垂直于轴240的电极224相对应)。以垂直于轴240为中心的任何运动、旋转、曲率或其任何组合都会导致正感测元件220-226以类似于负感测元件230-236的方式运动,从而以差动感测架构产生无净输出和零偏移。
50.在图2b的俯视图204中,正感测元件(电极)220-226中的每一个具有与垂直于轴242的对应的负感测元件(电极)230-236相同的距离。换句话说,每个对应的正和负电极从任何一点到轴242都有相同的距离。而且,从每个正感测元件220-226的中心到锚210的中心的距离与从每个对应的负感测元件230-236的中心到锚210的中心的距离相同。
51.因此,垂直于轴242,该负感测元件230具有与正感测元件226相同的距离(因此电极230与垂直于轴242的电极226相对应),负感测元件236具有与正感测元件220相同的距离(因此电极236与垂直于轴242的电极220相对应),负感测元件232具有与正感测元件224相同的距离(因此电极232与垂直于轴242的电极224相对应),负感测元件234具有与正感测元件222相同的距离(因此电极234与垂直于轴242的电极222相对应)。以轴242为中心的任何运动、旋转、曲率或其任何组合都会导致正感测元件220-226以类似于负感测元件230-236的方式移动,从而以差动感测架构产生无净输出和零偏移。
52.在图2b的俯视图204中,正感测元件(电极)220-226中的每一个具有与垂直于轴244的对应的负感测元件(电极)230-236相同的距离。换句话说,每个对应的正和负电极从任何一点到轴244都有相同的距离。另外,从每个正感测元件220-226的中心到锚210的中心的距离与从每个对应的负感测元件230-236的中心到锚210的中心的距离相同。
53.因此,垂直于轴244,该负感测元件230具有与正感测元件224相同的距离(因此电极230与垂直于轴244的电极224对应),该负感测元件236具有与正感测元件226相同的距离(因此电极236与垂直于轴244的电极226对应),该负感测元件232具有与正感测元件222相同的距离(因此电极232与垂直于轴244的电极222相对应),该负感测元件234具有与正感测元件220相同的距离(因此电极234与垂直于轴244的电极220相对应)。以轴244为中心的任何运动、旋转、曲率或其任何组合都会导致正感测元件220-226以类似于负感测元件230-236的方式移动,从而以差动感测架构产生无净输出和零偏移。
54.在图2b的俯视图204中,正感测元件(电极)220-226中的每一个具有与垂直于轴246的对应的负感测元件(电极)230-236相同的距离。换句话说,每个对应的正和负电极从任何一点到轴246都有相同的距离。而且,从每个正感测元件220-226的中心到锚210的中心的距离与从每个对应的负感测元件230-236的中心到锚210的中心的距离相同。
55.因此,垂直于轴246,该负感测元件230具有与正感测元件222相同的距离(因此电极230与垂直于轴246的电极222对应),该负感测元件236具有与正感测元件224相同的距离(因此电极236与垂直于轴246的电极224对应),该负感测元件232具有与正感测元件220相同的距离(所以电极232与垂直于轴246的电极220相对应),而负感测元件234具有与正感测元件226相同的距离(所以电极234与垂直于轴246的电极226相对应)。以轴246为中心的任何运动、旋转、曲率或其任何组合,都会导致正感测元件220-226以类似于负感测元件230-236的方式移动,从而以差动感测架构产生无净输出和零偏移。
56.图3a示出了根据另一实施例的具有一图案的感测元件和对应的微机电系统结构的微机电系统感测器的俯视图300。该俯视图300显示了包括正电极和负电极的该图案的感测元件的顶面。俯视图300包括微机电系统感测器的锚310、正电极320、322、324和326、负电极330、332、334和336、以及由虚线表示的四个极性反对称的轴340、342、344和346。在图3a中,锚310的形状是方形的,以对应于同样是方形的该图案的感测元件的形状。
57.在一个实施例中,图3a的微机电系统感测器包括通过锚310耦合到感测参考平面
的微机电系统装置,从而在微机电系统装置和感测参考平面之间产生间隙。该微机电系统装置包括连接在锚310和检测质量之间的弹簧。响应于外力,该检测质量在z轴上移动,该外力包括但不限于加速度、磁场、科里奥利力或压力的外力。该图案的感测元件包括在感测参考平面上交替的正电极和负电极320-326和330-336。
58.在本实施例中,感测元件320-326和330-336形成差动感测架构。因此,只有当每对正电极感测元件320-326和负电极感测元件330-336与微机电系统装置之间的间隙因检测质量的移动而发生变化时才检测到运动。当感测加速度时,对于每个电极对(例如,对于正感测电极320和负感测电极330),该检测质量朝相同的方向移动相同的量。因此,使用该图案的感测元件(电极)的差动感测架构,该检测质量以引起可检测的运动的形状移动。感测元件320-326和330-336中的每一个的中心与锚310的中心具有共同的距离。如前所述,感测元件320-326和330-336具有四个反极性对称的轴340-346。在另一个实施例中,该图案的感测元件被设计为具有三个或更少和五个或更多的对称轴。
59.在图3a的俯视图300中,正感测元件(电极)320-326中的每一个具有与垂直于轴340的对应的负感测元件(电极)330-336相同的距离。换句话说,每个对应的正和负电极从任何一点到轴340都有相同的距离。而且,从每个正感测元件320-326的中心到锚310的中心的距离与从每个对应的负感测元件330-336的中心到锚310的中心的距离相同。
60.因此,垂直于轴340,该负感测元件336具有与正感测元件326相同的距离(因此电极336与垂直于轴340的电极326相对应),该负感测元件330具有与正感测元件324相同的距离(因此电极330与垂直于轴340的电极324相对应),该负感测元件332具有与正感测元件322相同的距离(因此电极332与垂直于轴340的电极322相对应),该负感测元件334具有与正感测元件320相同的距离(因此电极334与垂直于轴3440的电极320相对应)。以垂直于轴340为中心的任何锚旋转、曲率或其任何组合导致正感测元件320-326以与负感测元件330-336类似的方式移动,从而以差动感测架构产生无净输出和零偏移。
61.在图3a的俯视图300中,正感测元件(电极)320-326中的每一个具有与垂直于轴342的对应的负感测元件(电极)330-336相同的距离。换句话说,每个对应的正和负电极从任何一点到轴342都有相同的距离。另外,从每个正感测元件320-326的中心到锚310的中心的距离与从每个对应的负感测元件330-336的中心到锚310的中心的距离相同。
62.因此,垂直于轴342,该负感测元件330具有与正感测元件326相同的距离(因此电极330与垂直于轴342的电极326相对应),该负感测元件336具有与正感测元件320相同的距离(因此电极336与垂直于轴342的电极320相对应),该负感测元件332具有与正感测元件324相同的距离(所以电极332与垂直于轴342的电极324相对应),以及负感测元件334具有与正感测元件322相同的距离(所以电极334与垂直于轴342的电极322相对应)。以轴342为中心的任何运动、旋转、曲率或其任何组合,都会导致正感测元件320-326以类似于负感测元件330-336的方式运动,从而以差动感测架构产生无净输出和零偏移。
63.在图3a的俯视图300中,正感测元件(电极)320-326中的每一个具有与垂直于轴344的对应的负感测元件(电极)330-336相同的距离。换句话说,每个对应的正和负电极从任何一点到轴344都有相同的距离。另外,从每个正感测元件320-326的中心到锚310的中心的距离与从每个对应的负感测元件330-336的中心到锚310的中心的距离相同。
64.因此,垂直于轴344,该负感测元件330具有与正感测元件324相同的距离(因此电
极330与垂直于轴344的电极320相对应),该负感测元件336具有与正感测元件326相同的距离(因此电极336与垂直于轴344的电极326相对应),该负感测元件332具有与正感测元件322相同的距离(所以电极332与垂直于轴344的电极322相对应),以及负感测元件334具有与正感测元件320相同的距离(所以电极334与垂直于轴344的电极320相对应)。以轴344为中心的任何运动、旋转、曲率或其任何组合都会导致正感测元件320-326以类似于负感测元件330-336的方式运动,从而以差动感测架构产生无净输出和零偏移。
65.在图3a的俯视图300中,正感测元件(电极)320-326中的每一个具有与垂直于轴346的对应的负感测元件(电极)330-336相同的距离。换句话说,每个对应的正和负电极从任何一点到轴346都有相同的距离。而且,从每个正感测元件320-326的中心到锚310的中心的距离与从每个对应的负感测元件330-336的中心到锚310的中心的距离相同。
66.因此,垂直于轴346,该负感测元件330具有与正感测元件322相同的距离(因此电极330与垂直于轴346的电极322对应),该负感测元件336具有与正感测元件324相同的距离(因此电极336与垂直于轴346的电极324对应),该负感测元件332具有与正感测元件320相同的距离(所以电极332与垂直于轴346的电极320相对应),而负感测元件334具有与正感测元件326相同的距离(所以电极334与垂直于轴346的电极326相对应)。以轴346为中心的任何运动、旋转、曲率或其任何组合都会导致正感测元件320-326以类似于负感测元件330-336的方式移动,从而以差动感测架构产生无净输出和零偏移。
67.图3b示出了根据一实施例的使用电极图案的微机电系统感测器的微机电系统加速度计结构350。该微机电系统加速度计结构350类似于图2a中的微机电系统装置250。在微机电系统感测器的正平面外加速度下,检测质量360围绕扭转弹簧370和375在负rx方向上旋转。相对于感测平面,这导致正感测电极320和322之间的间隙减少,负感测电极334和332之间的间隙增加。在一个实施例中,电极324、326、330和336被刚性地连接到锚上,并且不会因微机电系统感测器的加速度而产生间隙变化。一信号处理器将电极320-326和330-336组合起来,以输出与感测器加速度成比例的信号。
68.在图3b中,在微机电系统感测器的锚旋转下,如图1的第一非理想条件104所示,所有的电极320-326和330-336都连接到锚,并且以类似于图3a中所描述的平板的群组围绕轴340、344和346运动。信号处理器组合电极320-326和330-336,并且如果锚旋转(anchor rotation)或感测参考平面曲率以轴340-346为中心,则不产生净输出。在本实施例中,电极320、322、332和334用于检测微机电系统感测器的加速度,而电极320-326、330-336用于抑制由锚旋转或感测参考平面曲率引起的偏移。
69.图4示出了根据另一实施例的具有一图案的感测元件的微机电系统感测器的俯视图400。俯视图400显示了包括正电极和负电极的该图案的感测元件的顶面。俯视图400包括微机电系统感测器的锚410、正电极420、422和424、负电极430、432和434、以及由虚线表示的三个反极性对称的轴440、442和444。在图4中,锚410的形状是圆形的,以对应于也是圆形的该图案的感测元件的形状。
70.在一个实施例中,图4的微机电系统感测器包括通过锚410耦合到感测参考平面的微机电系统装置,从而在微机电系统装置和感测参考平面之间产生间隙。微机电系统装置包括连接在锚410和检测质量之间的弹簧。在一外力作用下,该检测质量在z轴上移动,该外力包括但不限于加速度、磁场、科里奥利力、压力和许多其他的外力。该图案的感测元件包
括交替的正和负电极420-424和430-434,并连接在微机电系统装置和感测参考平面之间。正电极感测元件420-424感测正向运动,负电极感测元件430-434感测负向运动。
71.在本实施例中,该感测元件420-424和430-434形成一差动感测架构。因此,只有当正电极感测元件420-424相对于负电极感测元件430-434移动时才会检测到运动。使用该图案的感测元件(电极)的差动感测架构,该检测质量以引起可检测的运动形状移动。每个感测元件420-424和430-434的中心与锚410的中心具有共同半径。如前所述,感测元件420-424和430-434具有三个反极性对称的轴440-444。
72.在图4的俯视图400中,正感测元件(电极)420-424中的每一个具有与垂直于轴440的对应的负感测元件(电极)430-434相同的距离。换句话说,每个对应的正和负电极从任何一点到轴440都有相同的距离。另外,从每个正感测元件420-424的中心到锚410的中心的距离与从每个对应的负感测元件430-434的中心到锚410的中心的距离相同。
73.因此,垂直于轴440,该负感测元件430具有与正感测元件420相同的距离(因此电极430与垂直于轴440的电极420相对应),该负感测元件432具有与正感测元件424相同的距离(因此电极432与垂直于轴440的电极424相对应),以及负感测元件434具有与正感测元件422相同的距离(因此电极434与垂直于轴440的电极422相对应)。以轴440为中心的任何运动、旋转、曲率或其任何组合导致正感测元件420-424以类似于负感测元件430-434的方式移动,从而以差动感测架构产生无净输出和零偏移。
74.在图4的俯视图400中,正感测元件(电极)420-424中的每一个具有与垂直于轴442的对应的负感测元件(电极)430-434相同的距离。换句话说,每个对应的正和负电极从任何一点到轴442都有相同的距离。而且,从每个正感测元件420-424的中心到锚410的中心的距离与从每个对应的负感测元件430-434的中心到锚410的中心的距离相同。
75.因此,垂直于轴442,该负感测元件434具有与正感测元件420相同的距离(因此电极434与垂直于轴442的电极420对应),该负感测元件432具有与正感测元件422相同的距离(因此电极432与垂直于轴442的电极422对应),以及负感测元件430具有与正感测元件424相同的距离(因此电极430与垂直于轴442的电极424对应)。以轴442为中心的任何运动、旋转、曲率或其任何组合都会导致正感测元件420-424以类似于负感测元件430-434的方式运动,从而以差动感测架构产生无净输出和零偏移。
76.在图4的俯视图400中,正感测元件(电极)420-424中的每一个具有与垂直于轴444的对应的负感测元件(电极)430-434相同的距离。换句话说,每个对应的正和负电极从任何一点到轴444的距离都相同。而且,从每个正感测元件420-424的中心到锚410的中心的距离与从每个对应的负感测元件430-434的中心到锚410的中心的距离相同。
77.因此,垂直于轴444,负感测元件434具有与正感测元件424相同的距离(因此电极434与垂直于轴444的电极424相对应),该负感测元件430具有与正感测元件422相同的距离(因此电极430与垂直于轴444的电极422相对应),并且该负感测元件432具有与正感测元件420相同的距离(因此电极432与垂直于轴444的电极420相对应)。以轴444为中心的任何运动、旋转、曲率或其任何组合,都会导致正感测元件420-424以类似于负感测元件430-434的方式运动,从而以差动感测架构产生无净输出和零偏移。
78.图5示出了根据另一实施例的具有一图案的感测元件的微机电系统感测器的俯视图500。俯视图500显示了包括正电极和负电极的两个独立图案的感测元件的顶面。俯视图
500包括微机电系统感测器的锚510、第一图案中的正电极520、522、524和526、第一图案中的负电极530、532、534和536、第二图案中的正电极570、572、574和576、第二图案中的负电极560、562、564和566、以及由虚线表示的四个反极性对称的轴540、542、544和546。在图5中,锚510的形状是圆形的,以对应于两个独立图案的感测元件的形状,这两个独立图案也是圆形的。在另一个实施例中,这两个图案的感测元件相互配合工作,因此相互依赖。
79.在图5中,第一图案的感测元件包括交替的正电极520-526和负电极530-536,以类似于图2b的俯视图204中的该图案的感测元件(220-226和230-236)的方式工作。此外,第二图案的感测元件包括交替的正电极570-576和负电极560-566,其工作方式与图2b俯视图204中的该图案的感测元件(220-226和230-236)类似,但增加了额外的灵敏度水平,以进一步减少使用双差动感测架构(dual differential sensing scheme)的偏移。本领域的普通技术人员很容易理解到,第一和/或第二图案的感测元件的电极可以被重新组织,这会在所公开揭露的主题范围内。
80.图6示出了根据另一实施例的具有一图案的感测元件的微机电系统感测器的俯视图600。俯视图600显示了一图案的感测元件的顶面,该图案的感测元件包括四个象限中的正电极和负电极,四个象限被虚线表示的两个轴640(y轴)和642(x轴)划分。顶视图600包括微机电系统感测器的锚610、第一象限(左上)的正电极620-621和负电极630-631、第二象限(右上)的正电极622-623和负电极632-633、第三象限(左下)的正电极624-625和负电极634-635、以及第四象限(右下)的正电极626-627和负电极636-637。
81.在图6中,正电极620-627具有以锚610的中心为中心的“w”形,负电极630-637具有以锚610的中心为中心的“m”形。负电极630-637与正电极620-627交织在一起,以形成该图案的感测元件,从而减少由不良条件引起的偏移。
82.由于图6的该图案的感测元件,以轴642为中心的任何旋转都不会产生净输出和零偏移,因为正电极620-623与负电极630-633共用相同的距离(距离定义为电极中心与轴之间的垂直距离),并且正电极624-627与负电极634-637共用相同的距离。沿着轴642的任何曲率都不会产生净输出和零偏移,因为距离正电极620-623与负电极630-633的距离相同,正电极624-627与负电极634-637的距离相同。同样,任何沿轴640的曲率都不会产生净输出和零偏移,因为正电极620-621和624-625与负电极630-631和634-635的距离相同,而正电极622-623和626-627与负电极632-633和636-637的距离相同;而任何垂直于轴640的旋转都不会产生净输出和零偏移,因为正电极620-621和624-625与负电极630-631和634-635共用相同的距离,而正电极622-623和626-627与负电极632-633和636-637共用相同的距离。
83.在一个实施例中,电极630和631被结合成一个电极,电极624和625被结合成一个电极,电极632和633被结合成一个电极,电极626和627被结合成一个电极。
84.在第一实施例中,微机电系统感测器包括感测参考平面、耦合到感测参考平面的至少一个锚、以及耦合到该至少一个锚的至少一个检测质量,其中该至少一个检测质量中的一个在外部激励下移动。微机电系统感测器进一步包括位于感测参考平面上或耦合在感测参考平面和至少一个检测质量之间的一图案的感测元件(或感测电极),以检测感测参考平面的法线上的至少一个检测质量的运动,其中该图案的感测元件共享至少三个极性反对称的轴。微机电系统感测器还包括信号处理电路以组合该图案的感测元件,从而提供与外部激励成比例的输出。在一个实施例中,该输出是该图案的感测元件的正感测元件和负感
测元件之间的差。
85.在一个实施例中,至少一个检测质量透过至少一个弹簧耦合到至少一个锚。在一个实施例中,该图案的感测元件共用一个、两个、三个、四个和五个或更多的极性反对称的轴中的任何一个。在一个实施例中,每个感测元件的质心与至少一个锚的中心具有共同的距离。在一个实施例中,该图案的感测元件包括感测电极,在每个电极和至少一个检测质量之间形成可变电容器。
86.在一个实施例中,该图案的感测电极包括交替的正电极和负电极,并且在另一个实施例中,正电极和负电极不是交替的,而是可以包括两个或更多的正电极和/或两个或更多的负电极彼此相邻。在一个实施例中,该图案的感测电极包括交替的至少三个正感测电极和至少三个负感测电极。
87.在一个实施例中,每个负感测元件/电极具有与每个正感测元件/电极相同的面积,在另一个实施例中,每个负感测元件/电极具有与每个正感测元件/电极基本相同的电极面积。在一个实施例中,感测电极是电容感应、压阻感应和磁感应电极中的任何一种。在一个实施例中,每个感测电极的中心位于圆形、矩形、正方形、六边形、八边形和其他多边形中的任何一个的周长上,感测电极本身是圆形、矩形、正方形、六边形、八边形、环形扇形和多边形中的任何一个。
88.在一个实施例中,微机电系统感测器进一步包括在感测参考平面上的第二图案的感测元件,以检测至少一个检测质量相对于感测参考平面的运动,其中该第二图案的感测元件的每个感测元件共用至少三个极性反对称的轴,并且进一步其中该第二图案的感测元件的每个感测元件的质心与至少一个锚的中心共用第二共同距离。在另一个实施例中,微机电系统感测器包括多个感测元件图案,这些感测元件在彼此之上或彼此相邻地耦合以进一步减少偏移。
89.在第二实施例中,该微机电系统感测器的感测参考平面被两个轴(第一轴和第二轴)划分,在感测参考平面上形成四个象限,并且该图案的感测元件包括在四个象限的每个象限中的至少三个感测元件,以检测至少一个检测质量相对于感测参考平面的运动。在这个实施例中,微机电系统感测器包括耦合到感测参考平面的至少一个锚和耦合到该至少一个锚的至少一个检测质量,其中该至少一个检测质量之一在外部激励下移动。四个象限中的每一个都包括两个具有第一极性的外部感测电极和两个具有第二极性的内部感测电极。第一极性与第二极性相反,并且四个象限中的每个象限中的至少三个感测元件存在极性反对称性。
90.在一实施例中,在四个象限中的每个象限中,相对于第一轴或第二轴之一,最近的感测元件和最远的感测元件是第一极性的,在最近的感测元件和最远的感测元件之间,有至少一个第二极性的感测元件。在一个实施例中,第一极性与第二极性相反,四个象限中关于第一轴或第二轴中的至少一个存在极性反对称。在一个实施例中,至少一个锚的中心与第一轴和第二轴的交点重合。在一个实施例中,四个象限的每个象限中的至少三个感测元件的质心与第一轴或第二轴中的至少一个具有共同的距离。在一个实施例中,第一和第二极性之间的感测元件面积基本相同。
91.在一实施例中,该图案的感测元件包括第一图案和第二图案,其中第一图案是以至少一个锚为中心的m形极性图案,并且第二图案是以至少一个锚为中心的w形极性图案。
在一个实施例中,四个象限的每个象限中的至少四个感测元件的至少一部分在一条直线上,而在另一个实施例中,四个象限的每个象限中的至少四个感测元件的至少一部分在非直线和/或方向上。
92.至少四个感测元件中具有相反极性的的感测元件与对称线之一共用共同的距离。在一个实施例中,至少四个感测元件的形状是圆形、矩形、方形、六边形、八边形和多边形中的任何一种。在另一个实施例中,感测参考平面不被划分为任何象限,而该图案的感测元件则是包括两组至少四个感测元件,它们位于同一轴上并在至少一个锚的相对侧上。
93.如上所述,根据所揭露的主题的系统(微机电系统感测器)和方法利用感测参考平面上感测元件(电极)的多个图案来减少由于各种不期望的力而发生的微机电系统感测器的微机电系统装置与感测参考平面之间平行对准偏差的不利影响。平行对准中的偏差导致偏移,并且多个图案中的每一个都不产生净输出,并且透过利用抵消检测到的旋转和/或曲率类型的力的多个感测架构来改善偏移抑制(提供零或减少的偏移)。
94.此外,根据其他描述的实施例中,本主题揭露提供了微机电系统加速度计结构和设备,该结构和设备被配置为减少由微机电系统结构所锚定的表面或衬底的变形所产生的不期望的信号,这可以改善平面外感测微机电系统加速度计的偏移稳定性。例如,如上所述,在微机电系统惯性感测器中,例如在电容式微机电系统加速度计中,偏移(在没有施加外部加速度时的不期望的输出信号)主要由构成微机电系统装置的衬底的变形产生。在对平面外方向的加速度敏感的微机电系统加速度计的示例性情况中,当发生衬底变形时不产生任何信号的目的可以透过多种方式解决。所公开的主题提供了进一步的非限制性实施例,其采用了抑制此类不期望的信号的示例性态样。
95.所揭露的主题提供了平面微机电系统结构,其可以透过锚点(anchor point)悬挂在与微机电系统衬底相关的平面表面上方,如上文关于图2a-2b的描述。在非限制性态样中,示例性的微机电系统结构和设备可以包括参考微机电系统结构,以测量感测微机电系统结构的锚变形,如下文进一步描述。在进一步的非限制性态样中,参考微机电系统结构和感测微机电系统结构可以透过一个或多个弹簧(例如,感测弹簧)连接,其可以统称为弹性耦合,如本文进一步描述的。在另一个非限制性态样中,如本文所述的示例性感测微机电系统结构可以在存在设备变形的情况下与示例性参考微机电系统结构一起移动,而示例性感测微机电系统结构在响应于示例性微机电系统结构和设备上的外力时,进一步经受相对于示例性参考微机电系统结构的移动,如本文进一步所述。
96.在本文所述的示例性微机电系统加速度计中,示例性感测微机电系统结构可以被配置为响应于沿感测轴的外部加速度而产生期望的信号。在倾斜z轴加速度计的进一步非限制性实施例中,该进一步运动是围绕感测弹簧或弹性耦合所在的轴的倾斜运动。
97.在进一步的非限制性态样中,所描述的实施例的特征可以在于电容式感测架构,其中,电容器的第一板可以被配置为位于各自的微机电系统平面结构的表面上,并且其中电容器的相对板可以被配置为位于与第一板的表面平行的平面上(例如,在微机电系统衬底上或与之相邻)。因此,如本文进一步所述,各微机电系统平面结构上的电极可被配置为用于将施加在示例性微机电系统结构和设备上的外部负载转换成电容信息,其中,示例性参考微机电系统结构上的电极可以被配置为补偿否则将会产生的不期望的信号。根据各种非限制性的实施例,示例性的电极可以以圆形方式布置,如本文所进一步描述的。
98.在所述实施例中,根据各种非限制性实施例,所有电极可以具有相同的面积和距锚中心相同的半径,该锚中心位于电极图案的中心。根据进一步的非限制性态样,电极图案的中心对应于示例性参考微机电系统结构被锚定的中心。
99.在其他示例性实施例中,示例性参考微机电系统结构和示例性感测微机电系统结构在另外的非限制性态样中可以是具有交替的叉指臂或环形扇区。在示例性实施例中,示例性参考微机电系统结构和示例性感测微机电系统结构的臂或环形扇区的数量不相同,其中,在更进一步的非限制性态样中,示例性参考微机电系统结构和示例性感测微机电系统结构中的一个具有至少两个以上,该示例性参考微机电系统结构的臂或环形扇区的数量可以与电极的数量无关。
100.根据本文描述的各种实施例,该电极的最小数量可以是6个,但是可以仅以4的增量增加,其中数量(6、10、14、18...)可以允许示例性微机电系统结构或设备关于与感测弹簧或弹性耦合轴正交的轴完全对称。在进一步的非限制性实施例中,示例性参考微机电系统结构可以关于感测弹簧(或弹性耦合)所在的轴对称。如下面进一步描述的,取决于电极的数量(n),参考结构可以关于多达((n 2)/4)个轴对称。
101.根据进一步的非限制性实施例,示例性感测微机电系统结构可以关于与弹簧或弹性耦合轴正交的轴完全对称,并且在更进一步的非限制性态样中,进而可以由平衡感测结构以及不平衡感测结构组成,该平衡感测结构可以是关于弹簧或弹性耦合轴对称,该不平衡感测结构可以具有与弹簧或弹性耦合轴正交的一独特对称轴。根据本文所述的各种非限制性实施例,包括电极的圆形布置的示例性微机电系统结构或设备可以完全抑制沿n/2轴的刚性锚倾斜。
102.因此,图7描绘了针对本文所述的示例性微机电系统设备700的参考微机电系统结构的另一个非限制性实施例的各个态样。在非限制性态样中,示例性微机电系统装置可以包括示例性参考微机电系统结构702,其位于微机电系统衬底(未示出)上方的平面中,如上文关于图2a-2b的描述。在另一非限制性态样中,示例性参考微机电系统结构702可以被锚定(例如,透过锚704)到微机电系统衬底上。
103.图8描绘了针对另一示例性实施例的感测微机电系统结构802的进一步非限制性态样。例如,示例性微机电系统设备700可进一步包括示例性感测微机电系统结构802,该感测微机电系统结构802基本上可位于微机电系统衬底(未示出)上方的平面中,如上文关于图2a-2b的描述。在另一个非限制性态样中,示例性感测微机电系统结构802可以被配置为响应于施加在示例性微机电系统设备700上的外部负载(例如,加速度)而移动。在更进一步的非限制性态样中,示例性参考微机电系统结构702和示例性感测微机电系统结构802可以各自配置为各自的臂组(例如,参考微机电系统结构702的臂组和感测微机电系统结构802的臂组),该臂组布置为围绕参考微机电系统结构702的中心804径向延伸的叉指臂组(例如,参考微机电系统结构702和感测微机电系统结构802的臂组的交替布置),例如,关于图9进一步描述的。在示例性微机电系统设备700的另一个非限制性态样中,感测微机电系统结构802包括平衡感测质量和不平衡感测质量,例如,如下述关于图15的进一步描述。
104.图9描绘了针对根据本文所述的示例性实施例的示例性弹性耦合902的进一步非限制性态样。例如,示例性微机电系统设备700可以进一步包括被配置为将感测微机电系统结构802悬挂在微机电系统衬底(未示出)之上的弹性耦合902,如上文关于图2a-2b的描述。
图9进一步突显围绕参考微机电系统结构702的中心804径向延伸的一示例性的叉指臂组904(例如,参考微机电系统结构702和感测微机电系统结构802的臂组的交替布置)的一部分。
105.图9描绘了示例性微机电系统设备700的另一个非限制性态样,其中,该叉指臂组904(例如,参考微机电系统结构702和感测微机电系统结构802的臂组的交替布置)可以被配置成围绕参考微机电系统结构702的中心804的圆形布置。在示例性微机电系统设备700的另一个非限制性态样中,与参考微机电系统结构702相关联的叉指臂组904的数量可以不同于与感测微机电系统结构802相关联的叉指臂组904的数量。例如,根据另外的非限制性态样,与参考微机电系统结构702相关联的叉指臂组904的数量可以与感测微机电系统结构802相关联的叉指臂组904的数量相差两个叉指臂。在微机电系统设备700的更进一步的非限制性态样中,该弹性耦合902可以基本上沿着参考微机电系统结构702的第一对称轴定向,该第一对称轴基本上在微机电系统衬底上方的平面中与参考微机电系统结构702的中心804相交,例如如上关于图2a-2b所描述的,以及如下关于图14的进一步描述。
106.图10描绘了针对如本文所述的示例性装置的感测电极的非限制性实施方案的各个态样。例如,示例性微机电系统设备700可以进一步包括多个感测电极1002,多个感测电极1002可以定位成与感测微机电系统结构802平行(例如,位于各自微机电系统平面结构的表面上),并且其可以被配置为感测该感测微机电系统结构802的位置,如本文进一步描述。
107.图11示出了针对示例性装置的参考电极的非限制性实施例的进一步态样。例如,示例性微机电系统设备700可以进一步包括多个参考电极1102,多个参考电极1102可以定位成平行于参考微机电系统结构702(例如,位于各微机电系统平面结构的表面上),并且可以被配置为感测微机电系统衬底、微机电系统衬底(未示出)的变形,如上述关于图1、2a-2b等的描述。
108.图12描绘了本文所述的示例性装置的进一步非限制性态样。例如,如上所述,图9进一步突显出围绕参考微机电系统结构702的中心804径向延伸的示例性叉指臂组904的一部分(例如,参考微机电系统结构702和感测微机电系统结构802的臂组的交替布置)。在示例性微机电系统设备700的另一个非限制性态样中,多个参考电极1102中的每一个和多个感测电极1002中的每一个可以与叉指臂组904(例如,参考微机电系统结构702和感测微机电系统结构802的臂组的交替布置)内相应的臂(例如,参考微机电系统结构702或感测微机电系统结构802的臂组中的一个臂)相关联。如图12所示,每个感测电极1002与感测微机电系统结构802的相应臂或环形扇区相关联,而每个参考电极1102与感测参考结构702的相应臂或环形扇区相关联。
109.在示例性微机电系统设备700的另一个非限制性态样中,多个参考电极1102的数量可以与多个感测电极1002的数量不同。在一个非限制性的例子中,在微机电系统设备700的另一个非限制性态样中,多个参考电极1102和多个感测电极1002的总和可以是至少六个。在又一个非限制性例子中,总和由电极的数量n定义,其中n等于6 4x,并且其中x等于零或正整数的选择(例如,6、10、14、18,...)。
110.根据示例性微机电系统设备700的更进一步非限制性态样,感测电极1002和参考电极1102中的一个或多个可以位于微机电系统衬底上方的平面之下,例如上文关于图2a-2b的描述,如图12所示,用虚线表示隐藏。
111.图13显示了针对电极配置的示例性装置的更进一步的非限制性态样。例如,在示例性微机电系统设备700的另一个非限制性态样中,该参考微机电系统结构702可以基本上在微机电系统衬底上方的平面中的参考微机电系统结构702的中心804被锚定(例如,透过锚704)到微机电系统衬底(未示出),如上文关于图2a-2b的描述,如上文关于图2a-2b的描述。此外,在示例性微机电系统设备700的另一个非限制性态样中,多个感测电极1002中的每一个和多个参考电极1102中的每一个的特征可以在于具有基本相同的面积或从锚704的中心延伸等效径向距离中的至少一个,该锚704的中心可以基本上位于参考微机电系统结构702的中心804附近。
112.如图13所描绘的,与感测微机电系统结构802的相应臂或环形扇区相关的每个感测电极1002被配置为对应的环形扇区,而与感测参考结构702的相应臂或环形扇区相关的每个参考电极1102被配置为对应的环形扇区。因此,在一个非限制性态样中,与感测电极1002的环形扇区相关的面积可以与参考电极1102的环形扇区相关的面积基本相同,而没有限制。在图13中描绘的另一个非限制性态样中,每个感测电极1002和每个参考电极1102可以从锚704的中心延伸一等效径向距离(例如,r
reference 1302大约等于r
sense 1304),该锚704的中心可以基本上位于示例性参考微机电系统结构702的中心804附近。
113.图14描绘了根据本文进一步非限制性实施例的示例性参考微机电系统结构702的各个态样。例如,示例性微机电系统设备700可以进一步包括示例弹性耦合902(例如,一个或多个弹簧的布置),该弹性耦合902可以基本上沿着参考微机电系统结构702的第一对称轴1402定向,该第一对称轴1402基本上与参考微机电系统结构702的中心804在微机电系统衬底上方的平面内相交,例如上述关于图2a-2b的描述。在示例性微机电系统设备700的另一个非限制性态样中,示例性参考微机电系统结构702可以在微机电系统衬底上方的平面中关于第二对称轴对称,如上文关于图2a-2b所述。作为非限制性例子,示例性参考微机电系统结构702可以在微机电系统衬底上方的平面中关于第二对称轴对称,如上文关于图2a-2b所述,并且该第二对称轴与第一对称轴1402正交(例如,对称轴1404)。
114.如上文关于图12所述,多个参考电极1102和多个感测电极1002的总和可以由电极的数量n定义,其中n等于6 4x,并且其中x等于零或正整数的选择(例如,6、10、14、18,...)。在另一个非限制性态样中,示例性参考微机电系统结构702可以被配置为具有由((n 2)/4)给出的对称轴的数量。在另一个非限制性态样中,示例性参考微机电系统结构702可被配置为具有位于微机电系统衬底(未示出)上方的平面中的参考微机电系统结构702的对称轴上的叉指臂组904的参考臂或环形扇区,如上述关于图2a-2b的描述。在示例性微机电系统设备700的另一个非限制性态样中,与示例性参考微机电系统结构702相关的对称轴(例如,轴1402、1404、1406、1408等)可以被相等角度分开。
115.图15描绘了根据仍然是其他非限制性实施例的示例性微机电系统感测结构802的进一步非限制性态样。例如,示例性微机电系统设备700可以进一步包括示例性感测微机电系统结构802,该结构可以包括平衡感测质量1502和不平衡感测质量1504。在示例性微机电系统设备700的另一个非限制性态样中,平衡感测质量1502可以在微机电系统衬底(未显示)的上方的平面中至少关于第一对称轴1402对称,如上文关于图2a-2b的描述。在微机电系统设备700的另一个非限制性态样中,不平衡感测质量1504可以至少关于对称轴1404对称,该对称轴1404在微机电系统衬底(未示出)上方的平面中与第一对称轴1402正交,如上
文关于图2a-2b的描述。
116.图16描绘了根据本文所述的各种态样的倾斜z轴平面外感测微机电系统加速度计的示例性实施例。上面所描述的内容包括所揭露的实施例的例子。当然,为了描述所要求保护的主题,不可能描述配置、组件和/或方法的每一种可能的组合,但应该理解,各种实施例的许多进一步组合和排列是可能的。因此,所要求保护的主题旨在包含所有属于所附权利要求的精神和范围内的这种改变、修改和变化。虽然在主题揭露中描述了具体的实施例和实例,以达到说明的目的,但是考虑在这些描述的实施例的范围内的各种修改是可能的。
117.作为非限制性示例,存在可以设计用于偏移稳定性改善的其他配置。以上关于图7-15描述的示例性实施例允许电极上方的微机电系统结构关于与弹簧或弹性耦合轴正交的轴对称,并且参考结构至少关于两个正交轴对称,其中之一是弹簧或弹性耦合轴。
118.所揭露的主题有利于在电极图案上方采用对称微机电系统结构的示例性微机电系统结构和设备中改善偏移,具有多个对称轴以抑制衬底变形,其中两个对称轴是装置所关于而倾斜的轴(在倾斜微机电系统装置结构的情况下)以及其正交的对称轴。
119.所述非限制性实施例设想了基于增加电极数量的微机电系统装置的偏移最小化的进一步改进,但要考虑到工艺限制、微机电系统装置的稳健性、整体结构增益、装置占用面积等,因为补偿电极或参考电极对装置增益没有贡献。因此,为了获得具有相同增益的装置(例如相同面积的感测电极),具有增加的补偿或参考电极的装置将必然更大。
120.如本文所使用的,术语“推断”或“推理”通常指从透过事件、信号和/或数据捕获的一组观察中推理或推断系统和/或环境的状态的过程。例如,推理可以被用来识别特定的上下文或动作,或者可以产生状态的概率分布。推理可以是概率性的,也就是说,根据对数据和事件的考虑,计算出感兴趣的状态的概率分布。推理也可以指用于从一组事件和/或数据中组成更高级别的事件的技术。这种推理会导致从一组观察到的事件和/或存储的事件数据中构建新的事件或动作,无论这些事件是否在接近的时间上相互关联,以及无论这些事件和数据是否来自一个或几个事件和数据来源。
121.此外,本文中使用的“示例”或“示例性”一词是指作为一个例子、实例或说明。此处描述为“示例性”的任何态样或设计不一定被解释为比其他态样或设计更优选或有利。相反,使用“示例性”一词的目的是为了以具体的方式呈现概念。在本技术中,术语“或”的意思是在表示包含性的“或”而不是排他性的“或”。也就是说,除非另有说明,或从上下文中可以清楚看出,否则“x采用a或b”是指任何自然的包含性排列。也就是说,如果x采用了a;x采用了b;或者x同时采用了a和b,则“x采用a或b”在上述任何一种情况下均成立。此外,在本技术和所附权利要求中使用的冠词“一个”和“一”通常应被解释为“一个或多个”,除非另有说明或从上下文中明确指示为单数形式。
122.此外,虽然一个态样可能仅就几个实施例中的一个而被公开,但这样的特征可与其他实施例中的一个或多个其他特征组合,这对于任何给定或特定应用可能是期望的和有利的。此外,在具体实施方式或权利要求书中使用术语“包括”、“具有”、“包含”及其变体和其他类似词语的范围内,这些术语旨在以类似于作为开放过渡词的术语“包括”的方式具有包容性,而不排除任何附加的或其他的元素。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。