技术特征:
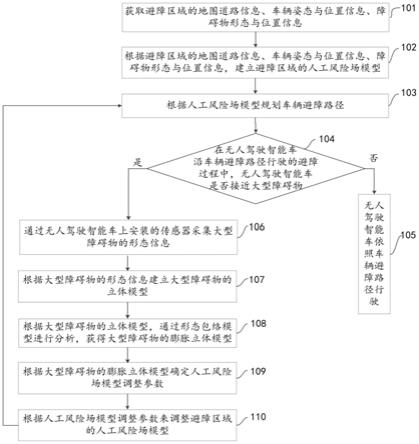
1.一种基于大型障碍物形态信息的车辆避障路径规划方法,其特征在于,包括:获取避障区域的地图道路信息、车辆姿态与位置信息、障碍物形态与位置信息;所述避障区域的地图道路信息包括目标位置;所述车辆姿态与位置信息包括无人驾驶智能车的车辆位置;所述障碍物形态与位置信息包括大型障碍物的障碍物位置;根据所述避障区域的地图道路信息、车辆姿态与位置信息、障碍物形态与位置信息,建立所述避障区域的人工风险场模型;根据所述人工风险场模型规划车辆避障路径;在所述无人驾驶智能车沿所述车辆避障路径行驶的避障过程中,判断所述无人驾驶智能车是否接近所述大型障碍物;若所述无人驾驶智能车未接近所述大型障碍物,所述无人驾驶智能车依照所述车辆避障路径行驶;若所述无人驾驶智能车接近所述大型障碍物,通过所述无人驾驶智能车上安装的传感器采集所述大型障碍物的形态信息;根据所述大型障碍物的形态信息建立大型障碍物的立体模型;根据所述大型障碍物的立体模型,通过形态包络模型进行分析,获得大型障碍物的膨胀立体模型;根据所述大型障碍物的膨胀立体模型确定人工风险场模型调整参数;根据所述人工风险场模型调整参数来调整所述避障区域的人工风险场模型,返回所述根据所述人工风险场模型规划车辆避障路径的步骤。2.根据权利要求1所述的方法,其特征在于,所述根据所述避障区域的地图道路信息、车辆姿态与位置信息、障碍物形态与位置信息,建立所述避障区域的人工风险场模型,具体包括:根据所述避障区域的地图道路信息、车辆姿态与位置信息、障碍物形态与位置信息,建立所述避障区域的人工风险场模型;所述人工风险场模型包括引力势场函数斥力势场函数合力势场函数引力函数斥力函数以及合力函数其中u
att
(q)、u
rep
(q)、u
total
(q)分别表示引力势场、斥力势场、合力势场;f
att
(q)、f
rep
(q)、f
total
(q)分别表示引力、斥力、合力;k
att
、k
rep
分别表示引力势场增益因子、斥力势场增益因子;q、q
g
、q
o
分别表示车辆位置、目标位置、障碍物位置;ρ(q,q
g
)表示q与q
g
间的欧式距离;ρ(q,q
o
)表示q与q
o
间的欧式距离;ρ0表示障碍物的斥力影响范围;n表示障碍物的个数。3.根据权利要求2所述的方法,其特征在于,所述根据所述大型障碍物的立体模型,通过形态包络模型进行分析,获得大型障碍物的膨胀立体模型,具体包括:
根据所述大型障碍物的立体模型,通过形态包络模型进行分析,获得大型障碍物的膨胀立体模型其中,a表示所述大型障碍物的立体模型;b表示结构元素;a
dil
表示所述大型障碍物的膨胀立体模型;(x,y,z)表示所述避障区域的三维坐标点;b
(x,y,z)
表示原点为(x,y,z)的结构元素b。4.根据权利要求3所述的方法,其特征在于,所述根据所述大型障碍物的膨胀立体模型确定人工风险场模型调整参数,具体包括:根据所述大型障碍物的膨胀立体模型a
dil
,采用公式确定膨胀操作的膨胀值d;根据所述膨胀操作的膨胀值d,采用公式k
att
=l
att
(c
att
)
d
、k
rep
=l
rep
(c
rep
)
d
、ρ
o
=l
ρ
(c
ρ
)
d
确定人工风险场模型调整参数;所述人工风险场模型调整参数包括k
att
、k
rep
以及ρ0;其中l
att
、l
rep
、l
ρ
分别表示引力势场倾斜因子、斥力势场倾斜因子、斥力影响范围倾斜因子;c
att
、c
rep
、c
ρ
分别表示引力势场截断因子、斥力势场截断因子、斥力影响范围截断因子。5.一种基于大型障碍物形态信息的车辆避障路径规划系统,其特征在于,包括:信息获取模块,用于获取避障区域的地图道路信息、车辆姿态与位置信息、障碍物形态与位置信息;所述避障区域的地图道路信息包括目标位置;所述车辆姿态与位置信息包括无人驾驶智能车的车辆位置;所述障碍物形态与位置信息包括大型障碍物的障碍物位置;人工风险场模型建立模块,用于根据所述避障区域的地图道路信息、车辆姿态与位置信息、障碍物形态与位置信息,建立所述避障区域的人工风险场模型;避障路径规划模块,用于根据所述人工风险场模型规划车辆避障路径;障碍物判断模块,用于在所述无人驾驶智能车沿所述车辆避障路径行驶的避障过程中,判断所述无人驾驶智能车是否接近所述大型障碍物;车辆行驶模块,用于若所述无人驾驶智能车未接近所述大型障碍物,所述无人驾驶智能车依照所述车辆避障路径行驶;障碍物形态信息采集模块,用于若所述无人驾驶智能车接近所述大型障碍物,通过所述无人驾驶智能车上安装的传感器采集所述大型障碍物的形态信息;障碍物立体模型建立模块,用于根据所述大型障碍物的形态信息建立大型障碍物的立体模型;障碍物膨胀立体模型建立模块,用于根据所述大型障碍物的立体模型,通过形态包络模型进行分析,获得大型障碍物的膨胀立体模型;模型调整参数计算模块,用于根据所述大型障碍物的膨胀立体模型确定人工风险场模型调整参数;模型参数调整模块,用于根据所述人工风险场模型调整参数来调整所述避障区域的人工风险场模型,返回所述根据所述人工风险场模型规划车辆避障路径的步骤。6.根据权利要求5所述的系统,其特征在于,所述人工风险场模型建立模块具体包括:人工风险场模型建立单元,用于根据所述避障区域的地图道路信息、车辆姿态与位置信息、障碍物形态与位置信息,建立所述避障区域的人工风险场模型;所述人工风险场模型
包括引力势场函数斥力势场函数合力势场函数引力函数斥力函数以及合力函数其中u
att
(q)、u
rep
(q)、u
total
(q)分别表示引力势场、斥力势场、合力势场;f
att
(q)、f
rep
(q)、f
total
(q)分别表示引力、斥力、合力;k
att
、k
rep
分别表示引力势场增益因子、斥力势场增益因子;q、q
g
、q
o
分别表示车辆位置、目标位置、障碍物位置;ρ(q,q
g
)表示q与q
g
间的欧式距离;ρ(q,q
o
)表示q与q
o
间的欧式距离;ρ0表示障碍物的斥力影响范围;n表示障碍物的个数。7.根据权利要求6所述的系统,其特征在于,所述障碍物膨胀立体模型建立模块具体包括:障碍物膨胀立体模型建立单元,用于根据所述大型障碍物的立体模型,通过形态包络模型进行分析,获得大型障碍物的膨胀立体模型其中,a表示所述大型障碍物的立体模型;b表示结构元素;a
dil
表示所述大型障碍物的膨胀立体模型;(x,y,z)表示所述避障区域的三维坐标点;b
(x,y,z)
表示原点为(x,y,z)的结构元素b。8.根据权利要求7所述的系统,其特征在于,所述模型调整参数计算模块具体包括:膨胀值计算单元,用于根据所述大型障碍物的膨胀立体模型a
dil
,采用公式确定膨胀操作的膨胀值d;模型调整参数计算单元,用于根据所述膨胀操作的膨胀值d,采用公式k
att
=l
att
(c
att
)
d
、k
rep
=l
rep
(c
rep
)
d
、ρ
o
=l
ρ
(c
ρ
)
d
确定人工风险场模型调整参数;所述人工风险场模型调整参数包括k
att
、k
rep
以及ρ0;其中l
att
、l
rep
、l
ρ
分别表示引力势场倾斜因子、斥力势场倾斜因子、斥力影响范围倾斜因子;c
att
、c
rep
、c
ρ
分别表示引力势场截断因子、斥力势场截断因子、斥力影响范围截断因子。
技术总结
本发明涉及一种基于大型障碍物形态信息的车辆避障路径规划方法及系统。所述方法包括:获取避障区域的地图道路信息、车辆姿态与位置信息、障碍物形态与位置信息,据此建立人工风险场模型并规划车辆避障路径;在无人驾驶智能车沿车辆避障路径行驶的避障过程中,判断智能车是否接近大型障碍物;若是,采集大型障碍物的形态信息并建立立体模型,进而通过形态包络模型进行分析,建立大型障碍物的膨胀立体模型;根据膨胀立体模型确定人工风险场模型调整参数;根据人工风险场模型调整参数来调整避障区域的人工风险场模型。本发明方法能够提高无人驾驶车辆避障过程的安全性,为无人驾驶车辆避障策略的研究提供新的研究思路。辆避障策略的研究提供新的研究思路。辆避障策略的研究提供新的研究思路。
技术研发人员:徐晓明 洪吉超 陈东方 赤骋 胡松 王越 李跃华 李仁政 孙旭东 唐伟 赵磊
受保护的技术使用者:北京格睿能源科技有限公司
技术研发日:2022.01.17
技术公布日:2022/4/22
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。