技术特征:
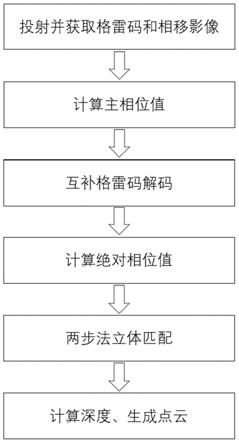
1.一种基于互补格雷码和两步法匹配快速生成点云的方法,其特征在于:所述方法包括以下步骤:步骤1、投影仪投射格雷码图像和相移图像,左相机和右相机拍摄下图像;并分别对左相机和右相机拍摄下的图像进行步骤2-4的处理;步骤2、计算主相位值步骤2、计算主相位值其中,n代表相移图像的数量;i
n
是不同相移图像的像素值;步骤3、互补格雷码解码;步骤1中投射了n 1幅格雷码,投射n级格雷码和一幅额外的第n 1级格雷码组成了互补格雷码,第n 1互补格雷码条纹周期是第n幅格雷码条纹周期的一半;相位周期值k1由gc
1-gc
n
格雷码直接解码得到,k2则是先由gc
1-gc
n 1
格雷码解码得到k
m
,然后由公式(3)得到k2:其中,int(x)表示x向下取整;步骤4、利用主相位值、相位周期值和互补格雷码周期指计算绝对相位值,如下:步骤5、两步法立体匹配;根据上述步骤2-4得到左绝对相位和右绝对相位,以下将根据左绝对相位和右绝对相位进行两步法匹配,具体如下:第一步,像素级别的区间匹配;对于左图中的任何一点p其满足公式(5),则视为其与右图中的p1匹配:φ
r
(x
r
,y)≤φ
l
(x
l
,y)≤φ
r
(x
r
1,y)
ꢀꢀꢀ
(5)其中,φ
l
(x
l
,y)代表左图中p点的绝对相位值,φ
r
(x
r
,y)代表右图中p1点的绝对相位值,φ
r
(x
r
1,y)代表p1右边相邻一点对应的绝对相位值;第二步,亚像素级别的匹配;利用插值进行修正找到亚像素级别的匹配关系,调整作图像素点(x
l
,y)的对应的右图匹配点为(x
l
δ,y),δ的值由公式(6)计算得到:δ表示插值之后得到的点位和原来的点位之间的距离;
步骤6、利用匹配结果和相机内参计算深度,生成点云。2.根据权利要求1所述的一种基于互补格雷码和两步法匹配快速生成点云的方法,其特征在于:所述步骤2中,对公式(1)约定如下:a.分子和分母均不小于0时,位于第一象限(即);b.分子大于0而分母小于0时,位于第二象限(即);c.分子分母均小于0时,位于第三象限(即);d.分子小于0而分母大于0时,位于第四象限(即)。3.根据权利要求1所述的一种基于互补格雷码和两步法匹配快速生成点云的方法,其特征在于:所述步骤中,第一步的区间匹配遵循满足两个原则:a.假设已经确定(x
l
,y)与(x
r
,y)为一匹配点对,则左图中的下一个点(x
l
1,y)的匹配点理应在区间[x
r
,x
r
d],d为正整数,为匹配搜索的第一个范围;b.当在[x
r
,x
r
d]中找不到(x
l
1,y)的匹配点时,则放弃匹配该第一搜索范围,更换成在第二搜索范围区间[x
r
d 1,x
l
1]去搜索匹配点。
技术总结
本发明涉及一种基于互补格雷码和两步法匹配快速生成点云的方法,其使用互补格雷码在解码的源头就对周期错位问题进行校正,相比于传统的周期错位校正方法和最大概率法周期校正方法,其具有更加快速和在解码时就解决周期错位的优势。同时在匹配是使用两步法匹配,不仅加快了匹配的速度,而且采用插值的方法可以得到亚像素级别的空间点云,两种方法的结合极大优化了双目结构光相机三维重建的周期错位和立体匹配慢的两个难点,并还极大提高了点云的精度。的精度。的精度。
技术研发人员:覃宝钻 黄少华 黄朋生 潘桐 周文
受保护的技术使用者:伯朗特机器人股份有限公司
技术研发日:2022.01.14
技术公布日:2022/4/22
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。