1.本发明属于调压自动控制技术领域,尤其涉及一种移相调压电路的控制系统及其控制方法。
背景技术:
2.现有移相调压电路控制方法在出现工频输入电压瞬时异常时,不能保证使输出电压平稳恢复,极易使负载过压损坏。
3.如图1所示,当过零检测与工频电压过零点同步,移相触发正常,输出电压稳定;
4.当输入电源连接不良或电源不稳定,会出现瞬时电压异常,如图2中t1到t2时刻,造成过零检测与实际工频电压过零点不同步而失误,最终使可控硅移相角也与工频电压相位不同步,造成可控硅导通时间过长,如图2中t3时刻开始产生输出过压,使负载承受过压冲击而损坏;
5.当输入电源出现异常时,由于电源中间出现不连续,会造成输出电压跌落;即使过零检测到正确点,如图3中的t2时刻,由于输出电压跌落下降,而pid调节输出量依然是电源出现异常前的调节值,设定值没变,但是测量的反馈值出现变小,误差变大,pid则会加大调节量,如图3中t3时刻,加剧了可控硅导通时间延长,pid调节会出现输出超调,依然造成输出过压冲击。
技术实现要素:
6.本发明的目的在于克服现有技术的不足之处,提供了一种移相调压电路的控制系统及其控制方法,该发明可有效解决出现工频输入电压瞬时异常时,移相调压电路不能保证使输出电压平稳恢复,极易使负载过压损坏的技术问题。
7.本发明解决其技术问题是可以通过以下技术方案实现:
8.一种移相调压电路的控制系统,包括工频电源输入模块、可控硅整流电路、输出滤波电路、可控硅触发电路、过零检测电路、电压反馈电路,数字pid调节电路。
9.工频电源输入模块与工频电源连接,输入工频电源;可控硅触发电路与可控硅整流电路连接,向可控硅元件发出触发信号,实现直流电压输出;输出滤波电路用于过滤输出电压谐波,提高输出电压质量;过零检测电路用于计算有效过零信号周期上下限值,判断过零检测信号是否为有效过零检测,并将有效信号传输至数字pid调节电路;电压反馈电路与数字pid调节电路连接,用于检测输出电压值,并将输出电压值传送至数字pid调节电路;数字pid调节电路与可控硅触发连接,采用pid控制方法调整触发信号,实现输出电压修正。
10.一种移相调压电路的其控制方法,包括以下步骤:
11.步骤s1工频电源输入过零检测:
12.通过过零检测电路检测工频输入电压过零点与过零检测信号是否同步,
13.如果过零检测信号与工频输入电压过零点同步时,移相触发正常,输出电压稳定;
14.如果过零检测信号与工频输入电压过零点不同步时,输出电压不稳定,说明工频
电压瞬时异常,进行步骤s2;
15.步骤s2计算有效过零信号周期上下限值ta和tb:
16.依据输入工频交流电源频率的上限值f
max
和下限值f
min
,分别计算出有效过零信号周期上下限值ta和tb,
17.有效过零信号周期上限值:
18.式中f
max
为工频交流电源频率上限值
19.有效过零信号周期下限值:
20.式中f
min
为工频交流电源频率下限值;
21.步骤s3检测过零信号,测量与上一次过零信号时间间隔值td:
22.数字pid调节电路包含对检测的过零信号进行识别,每次检测到过零信号,测量出与上一次过零信号的时间间隔值td;
23.步骤s4过零信号判定:
24.比较td是否在ta和tb之间,当td不在ta和tb之间时,判定过零信号无效,则设置电源异常信号,停止输出移相触发;循环等待有效过零检测,当连续测量到2-5次td在ta和tb之间时,判定过零信号有效;
25.步骤s5输出电压修正:
26.当连续测量到2-5次判定过零信号有效,即td在ta和tb之间时,依据当前测量的反馈电压值v
x
计算出对应在工频正弦波上的相位值r
x
,修正pid调节输出值为r
x
,同时将pid调节的当前设定值等于v
x
,开始进行移相调节输出;当输出电压稳定后,再将pid调节的设定值按适合速度逐渐增加到等于原先设定值,并取消电源异常信号;这样输出电压将会从v
x
逐渐增大到原先设定值,最终完美实现输出电压无过冲的平稳恢复。
27.较佳的,反馈电压值v
x
对应工频交流电源上的相位值r
x
:
[0028][0029]
式中f为工频交流电源额定频率,em为工频交流电源峰值电压。
[0030]
较佳的,步骤s5中计算反馈电压值v
x
对应工频交流电源上的相位值r
x
,采用比例关系方式。
[0031]
较佳的,步骤s5中pid控制计算公式为:
[0032]
pid=k
p
×
e(k) ki×
∑e(k) kd×
[e(k)-e(k-1)]
[0033]
式中k
p
为比例系数;ki为积分系数;kd为微分系数;
[0034]
e(k)为当前误差值(反馈电压与设定电压的误差值);
[0035]
e(k-1)为上一次误差值;
[0036]
∑e(k)为e(k)及以前的累积积分和。
[0037]
较佳的,k
p
、ki、kd系数使用原有系统技术默认系数即可,不做改变,当电压异常时,所述∑e(k)进行动态修正。
[0038]
较佳的,∑e(k)进行动态修正,包括以下步骤:
[0039]
步骤r1
[0040]
依据当前测量的反馈电压值v
x
计算出对应在工频正弦波上的相位值r
x
,修正pid调
节输出值为r
x
,
[0041]
使pid=r
x
做本次输出,同时将∑e(k)=r
x
做后续计算;
[0042]
步骤r2
[0043]
同时将pid调节的当前设定值等于v
x
,开始进行移相调节输出;
[0044]
将设定电压=v
x
[0045]
即是:e(k)当前误差值(反馈电压与v
x
的误差值)。
[0046]
较佳的,步骤s5中的适合速度,依据负载功率不同,使设定电压按照每秒增加10v-30v电压速度增加,直到等于原先设定值。
[0047]
本发明的优点和积极效果是:
[0048]
该方法可以在工频输入电源出现瞬时异常时,能够实时检测出异常过零信号及时停止移相输出,并且在实时跟踪识别出正确电源过零信号后,依据反馈的实时电压修正恢复后的移相调节值,使输出电压无过冲平稳的恢复到原始值,确保了对负载无过压冲击风险,减少经济损失。
附图说明
[0049]
图1是移相调压电路在工频输入电压正常时的工作波形图。
[0050]
图2是现有移相调压电路在电压瞬时异常时的工作波形图。
[0051]
图3是现有移相调压电路在电压出现中间不连续时的工作波形图。
[0052]
图4是本发明的移相调压电路的控制系统结构示意图。
[0053]
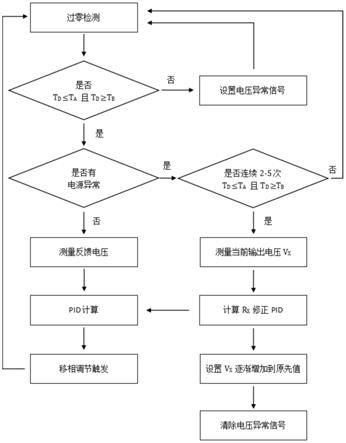
图5是本发明的移相调压电路的控制方法的方法流程图。
[0054]
图6是本发明在工频输入电压异常时的工作波形图。
具体实施方式
[0055]
下面结合附图并通过具体实施例对本发明作进一步详述,以下实施例只是描述性的,不是限定性的,不能以此限定本发明的保护范围。
[0056]
实施例:
[0057]
如图4所示,移相调压电路的控制系统包括:工频电源输入、可控硅整流电路、输出滤波电路、可控硅触发电路、过零检测电路、电压反馈电路,数字pid调节电路。
[0058]
工频电源输入模块与工频电源连接,输入工频电源;可控硅触发电路与可控硅整流电路连接,向可控硅元件发出触发信号,实现直流电压输出;输出滤波电路用于过滤输出电压谐波,提高输出电压质量;过零检测电路用于计算有效过零信号周期上下限值,判断过零检测信号是否为有效过零检测,并将有效信号传输至数字pid调节电路;电压反馈电路与数字pid调节电路连接,用于检测输出电压值,并将输出电压值传送至数字pid调节电路;数字pid调节电路与可控硅触发连接,采用pid控制方法调整触发信号,实现输出电压修正。
[0059]
如图5所示,图中ta为有效过零信号周期上限值;tb为有效过零信号周期下限值;td为每次过零检测电路检测到过零信号时,测量出与上一次过零信号的时间间隔值;v
x
为电压反馈电路测量的反馈电压值,r
x
为工频正弦波上的相位值。
[0060]
本发明的移相调压电路控制方法,包括以下步骤,
[0061]
步骤s1工频电源输入过零检测:
[0062]
通过过零检测电路检测工频输入电压过零点与过零检测信号是否同步,
[0063]
如图1所示,如果过零检测信号与工频输入电压过零点同步时,移相触发正常,输出电压稳定;
[0064]
如果过零检测信号与工频输入电压过零点不同步时,输出电压不稳定,说明工频电压瞬时异常,进行步骤s2;
[0065]
步骤s2计算有效过零信号周期上下限值ta和tb:
[0066]
依据输入工频交流电源频率的上限值f
max
和下限值f
min
,分别计算出有效过零信号周期上下限值ta和tb,
[0067]
有效过零信号周期上限值:
[0068]
式中f
max
为工频交流电源频率上限值
[0069]
有效过零信号周期下限值:
[0070]
式中f
min
为工频交流电源频率下限值;
[0071]
步骤s3检测过零信号,测量与上一次过零信号时间间隔值td:
[0072]
数字pid调节电路包含对检测的过零信号进行识别,每次检测到过零信号,测量出与上一次过零信号的时间间隔值td;
[0073]
步骤s4过零信号判定:
[0074]
(1)比较td是否在ta和tb之间,当td不在ta和tb之间时,判定过零信号无效,则设置电源异常信号,停止输出移相触发,即td>ta或td《tb时,数字pid调节电路识别为无效过零信号,返回过零检测继续等待下次过零识别;如图6中t1时刻,由于过零信号的识别判断会检测出t1到t2之间的过零信号为无效,pid调节电路已不再向后执行,设置电源异常信号,循环等待下次有效过零信号;
[0075]
(2)当判定过零信号为无效过零信号后,循环等待有效过零检测,当连续测量到2-5次td在ta和tb之间时,即td≤ta且td≥tb,判定过零信号有效。本实例取2次作为示例,如图6中的t3时刻则为有效开始过零信号,完美避开电源异常的波形时间段,取2次识别值满足最小识别计算,此值取较大值可以更好容错不同电源异常。
[0076]
步骤s5输出电压修正:
[0077]
连续测量到2-5次判定过零信号有效,即td在ta和tb之间时,依据当前测量的反馈电压值v
x
计算出对应在工频正弦波上的相位值r
x
,修正pid调节输出值为r
x
,同时将pid调节的当前设定值等于v
x
,开始进行移相调节输出;当输出电压稳定后,再将pid调节的设定值按适合速度逐渐增加到等于原先设定值,并取消电源异常信号。
[0078]
如图6中的t3时刻识别为有效过零信号,由于电源中间异常出现不连续,输出电压出现跌落下降,此时通过反馈测量出当前电压,如图6中的t4时刻对应的v
x
,按以下公式通过v
x
计算出对应此电压在输入交流电压波形上对应的相位值r
x
,然后修正当前pid输出值为r
x
,并且将pid的当前设定值修正为v
x
,这样pid计算输出的初始值则为r
x
,而且在输入交流电压上r
x
相位对应的电压为v
x
,这样开始调节输出,保证了输出电压是稳定在v
x
电压值,不会出现过压冲击,然后再通过适合速度将pid的设定值逐渐增加到等于电压异常前的原先设定值,并取消电源异常信号,这样输出电压将会从v
x
逐渐增大到原先设定值,实现输出电压的平稳恢复。
[0079]
较佳的,本实施例中,反馈电压值v
x
对应工频交流电源上的相位值r
x
:
[0080][0081]
式中f为工频交流电源额定频率,em为工频交流电源峰值电压。
[0082]
较佳的,本实施例中,步骤s5中计算反馈电压值v
x
对应工频交流电源上的相位值r
x
,可以采用比例关系方式计算。
[0083]
较佳的,本实施例中,步骤s5中pid控制计算公式为:
[0084]
pid=k
p
×
e(k) ki×
∑e(k) kd×
[e(k)-e(k-1)]
[0085]
式中k
p
为比例系数;ki为积分系数;kd为微分系数;
[0086]
e(k)为当前误差值(反馈电压与设定电压的误差值);
[0087]
e(k-1)为上一次误差值;
[0088]
∑e(k)为e(k)及以前的累积积分和。
[0089]
较佳的,本实施例中,k
p
、ki、kd系数使用原有系统技术默认系数即可,不做改变,当电压异常时,所述∑e(k)进行动态修正。
[0090]
较佳的,本实施例中,∑e(k)进行动态修正,包括以下步骤:
[0091]
步骤r1
[0092]
依据当前测量的反馈电压值v
x
计算出对应在工频正弦波上的相位值r
x
,修正pid调节输出值为r
x
,
[0093]
使pid=r
x
做本次输出,同时将∑e(k)=r
x
做后续计算;
[0094]
步骤r2
[0095]
同时将pid调节的当前设定值等于v
x
,开始进行移相调节输出;
[0096]
将设定电压=v
x
[0097]
即是:e(k)当前误差值(反馈电压与v
x
的误差值)。
[0098]
较佳的,本实施例中,步骤s5中的适合速度,依据负载功率不同,使设定电压按照每秒增加10v-30v电压速度增加,直到等于原先设定值。
[0099]
本发明可以在工频输入电源出现瞬时异常时,能够实时检测出异常过零信号及时停止移相输出,并且在实时跟踪识别出正确电源过零信号后,依据反馈的实时电压修正恢复后的移相调节值,使输出电压无过冲平稳的恢复到原始值,确保了对负载无过压冲击风险,减少经济损失。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
