1.本发明涉及一种底架,尤其涉及一种自动校准光源的光伏电板底架。
背景技术:
2.太阳能是人类取之不尽用之不竭的可再生能源,随着社会对节能减排的重视,传统能源所体现的不可重复利用有限性,在长期的能源战略中具有重要地位,将太阳能转换为电能,光伏发电系统变得必不可少。
3.专利申请cn214014141u,公开日为20210820。公开了一种便于安装的光伏支架,属于光伏发电装置技术领域,一种便于安装的光伏支架,包括底架和光伏板,底架左端固定连接有两个滑杆,两个滑杆上端均固定连接有限位块,两个滑杆侧壁上均滑动连接有套筒,两个套筒左端安装有同一个转轴,转轴侧壁上固定连接有固定板,固定板上端固定连接有支撑块,光伏板和支撑块为螺栓连接,两个滑杆侧壁上均安装有锁紧机构,底架右端固定连接有两个第二支架,它可以实现通过滚轮支撑和抬升机构将光伏板抬升至支架的预订安装位置,有效减轻了工作人员的工作负担,提升了光伏板的安装效率,同时便于对光伏板的拆卸和维护。虽然该装置便于对光伏板的拆卸和维护,但是由于太阳随着时间变化,照射的角度也会随之变化,导致光伏板工作效率降低,且光伏板长时间处于室外,容易堆积灰尘或杂物。
4.因此需要设计一种自动调整光伏板位置,不影响工作效率,且方便清理的自动校准光源的光伏电板底架,以解决现有技术问题。
技术实现要素:
5.为了克服由于太阳随着时间变化,照射的角度也会随之变化,导致光伏板工作效率降低,且光伏板长时间处于室外,容易堆积灰尘或杂物的缺点,本发明提供一种自动调整光伏板位置,不影响工作效率,且方便清理的自动校准光源的光伏电板底架。
6.本发明通过以下技术途径实现:一种自动校准光源的光伏电板底架,包括有支撑底箱、固定底板、旋转座、第一光电传感器、第二光电传感器、立式转轴、安装底箱、光伏电板、驱动机构和支撑机构,支撑底箱底部固接有固定底板,支撑底箱中间转动式设有立式转轴,立式转轴下部固接有旋转座,旋转座前侧面左部固接有第一光电传感器,旋转座前侧面右部固接有第二光电传感器,立式转轴顶端固接有安装底箱,安装底箱内通过螺栓的方式安装有光伏电板,立式转轴与支撑底箱之间设有用于提供动力的驱动机构,安装底箱与旋转座之间设有用于支撑保护的支撑机构。
7.进一步说明,驱动机构包括有伺服电机、驱动蜗杆和从动蜗轮,支撑底箱右侧面后部固接有伺服电机,支撑底箱后部转动式设有驱动蜗杆,驱动蜗杆右端与伺服电机的输出轴连接,立式转轴下部固接有从动蜗轮,从动蜗轮与驱动蜗杆啮合。
8.进一步说明,支撑机构包括有防尘顶罩、限位块、固定套筒、伸缩连杆和支撑弹簧,
安装底箱上部固接有用于遮雨防尘的防尘顶罩,安装底箱前侧面下部左右对称固接有限位块,旋转座顶部后部左右对称铰接式设有固定套筒,固定套筒内滑动式设有伸缩连杆,伸缩连杆与安装底箱转动连接,伸缩连杆底端与固定套筒内部之间设有支撑弹簧。
9.进一步说明,还包括有用于防尘保护的防尘机构,防尘机构包括有固定短柱、防尘布、横移立块、第一定位块、第二定位块、铁质滑动齿条、定位磁架、固定导轨、换向轴、从动齿轮、传动皮带组件、第三定位块、定位皮带组件、第一连接架、第一复位导杆、第一复位弹簧、开槽转轴、涡卷弹簧和固定横杆,安装底箱后侧面上部左右对称固接有固定短柱,安装底箱左右两侧都固接有第一复位导杆,第一复位导杆上滑动式设有横移立块,第一复位导杆上绕有第一复位弹簧,第一复位弹簧一端与横移立块连接,第一复位弹簧另一端与安装底箱连接,左右两侧横移立块前部之间设有固定横杆,固定横杆中部固接有用于遮挡的防尘布,支撑底箱中部固接有固定导轨,固定导轨上滑动式设有第一定位块,第一定位块与旋转座固定连接,固定导轨上滑动式设有第二定位块,第二定位块位于第一定位块后侧,第二定位块也与旋转座固定连接,固定导轨左部滑动式设有铁质滑动齿条,支撑底箱内中部固接有定位磁架,定位磁架位于固定导轨外侧,旋转座左部中间转动式设有换向轴,换向轴左部固接有从动齿轮,从动齿轮与铁质滑动齿条啮合,立式转轴上部转动式设有第三定位块,第三定位块左部与换向轴右部之间连接有传动皮带组件,传动皮带组件由两个皮带轮和皮带组成,一个皮带轮安装于第三定位块左部,一个皮带轮安装于换向轴右部,皮带绕于两个皮带轮之间,安装底箱后侧面右部与第三定位块之间连接有定位皮带组件,定位皮带组件由三个皮带轮和皮带组成,一个皮带轮安装于第三定位块右部,两个皮带轮转动式安装于安装底箱后侧面右部,皮带绕于三个皮带轮之间,定位皮带组件前部固接有第一连接架,第一连接架与右方横移立块连接,左右两侧固定短柱上部之间转动式设有开槽转轴,防尘部与开槽转轴固定连接,固定短柱内部与开槽转轴外部之间绕接有涡卷弹簧。
10.进一步说明,还包括有用于限位的夹紧机构,夹紧机构包括有夹紧块、第二连接架、海绵底架、限位弹簧、定位滑块、受力圆盘、限位立柱、第二复位弹簧、限位开槽板、定位横杆、第二复位导杆和第三复位弹簧,安装底箱内间隔滑动式连接有四个第二连接架,第二连接架外侧固接有夹紧块,夹紧块能与光伏电板接触,夹紧块上滑动式设有用于缓冲的海绵底架,夹紧块外侧面与海绵底架外部之间绕接有两根限位弹簧,安装底箱内部间隔固接有四根第二复位导杆,第二复位导杆上滑动式设有定位滑块,相邻定位滑块与第二连接架固定连接,第二复位导杆上绕有第二复位弹簧,第三复位弹簧一端与定位滑块连接,第三复位弹簧另一端与安装底箱连接,安装底箱中间滑动式设有两根限位立柱,两根限位立柱顶端之间固接有受力圆盘,受力圆盘与光伏电板接触,限位立柱底部与安装底箱内部之间设有第二复位弹簧,受力圆盘后侧面左右对称固接有限位开槽板,竖向同侧定位滑块之间固接有定位横杆,限位开槽板套于定位横杆上,限位开槽板与定位横杆滑动连接。
11.进一步说明,还包括有用于清理的清洁机构,清洁机构包括有清洁海绵柱、第一压力传感器、导向框、水泵、进水管、补液管、储液桶和出液管,横移立块前部之间转动式设有用于清理光伏电板的清洁海绵柱,安装底箱左部下侧固接有第一压力传感器,安装底箱下部固接有导向框,安装底箱上部左侧固接有水泵,防尘顶罩内侧面固接有出液管,出液管与水泵之间连接有进水管,安装底箱后侧面左上部固接有用于储水的储液桶,储液桶与水泵连通,储液桶上部连接有补液管。
12.进一步说明,还包括有用于吸附固定的吸附机构,吸附机构包括有第二压力传感器、u型导气管、吸附软罩和气泵,安装底箱内中部固接有第二压力传感器,安装底箱内中部固接有u型导气管,u型导气管上间隔连通有四个吸附软罩,吸附软罩能够吸附光伏电板,安装底箱上部中间固接有气泵,气泵与u型导气管连通。
13.进一步说明,还包括有电控箱,电控箱安装于支撑底箱右部前侧,电控箱内包括有开关电源、电源模块和控制模块,开关电源为该自动校准光源的光伏电板底架供电,电源模块上通过线路连接有电源总开关,控制模块和电源模块通过电性连接;控制模块上连接有ds1302时钟电路和24c02电路;第一压力传感器、第二压力传感器、第一光电传感器和第二光电传感器都与控制模块电性连接,伺服电机、水泵、气泵和定位磁架都与控制模块通过外围电路连接。
14.与现有技术相比,本发明其显著进步在于:1、本发明的第一光电传感器和第二光电传感器分别检测到两处光源强度不一致,第一光电传感器和第二光电传感器同时发出信号,控制模块接收信号后控制伺服电机工作,从而安装底箱正转带动光伏电板正转进行校准光源,如此,自动调整光伏板位置,不影响工作效率。
15.2、本发明在防尘机构的作用下,左右两侧横移立块通过固定横杆带动防尘布向下拉伸,如此,可更好对光伏电板进行防尘保护。
16.3、本发明在清洁机构的作用下,清洁海绵柱上下移动对光伏电板进行清理,同时,水泵通过进水管使得出液管开始喷水,清水也就对光伏电板进行清理,进而废水通过导向框排出,如此,可避免光伏电板上残留灰尘。
附图说明
17.图1为本发明的立体结构示意图。
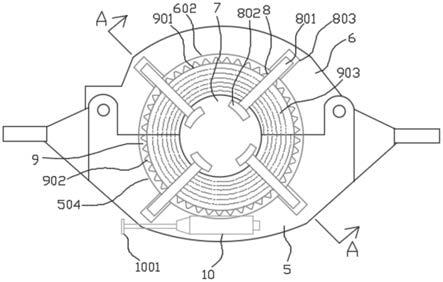
18.图2为本发明的第一种部分立体结构示意图。
19.图3为本发明的驱动机构的立体结构示意图。
20.图4为本发明的支撑机构的部分立体结构示意图。
21.图5为本发明的第二种部分立体结构示意图。
22.图6为本发明的防尘机构的第一种部分立体结构示意图。
23.图7为本发明的防尘机构的第二种部分立体结构示意图。
24.图8为本发明的防尘机构的第三种部分立体结构示意图。
25.图9为本发明的夹紧机构的第一种部分立体结构示意图。
26.图10为本发明a部分的放大示意图。
27.图11为本发明的夹紧机构的第二种部分立体结构示意图。
28.图12为本发明b部分的放大示意图。
29.图13为本发明的第三种部分立体结构示意图。
30.图14为本发明的清洁机构的第一种部分立体结构示意图。
31.图15为本发明的清洁机构的第二种部分立体结构示意图。
32.图16为本发明的吸附机构的立体结构示意图。
33.图17为本发明的电路框图。
34.图18为本发明的电路原理图。
35.图中零部件名称及序号:1-支撑底箱,2-固定底板,3-旋转座,4-电控箱,41-第一光电传感器,42-第二光电传感器,5-立式转轴,6-安装底箱,7-光伏电板,8-驱动机构,81-伺服电机,82-驱动蜗杆,83-从动蜗轮,9-支撑机构,91-防尘顶罩,92-限位块,93-固定套筒,94-伸缩连杆,95-支撑弹簧,10-防尘机构,101-固定短柱,102-防尘布,103-横移立块,104-第一定位块,105-第二定位块,106-铁质滑动齿条,107-定位磁架,108-固定导轨,109-换向轴,1010-从动齿轮,1011-传动皮带组件,1012-第三定位块,1013-定位皮带组件,1014-第一连接架,1015-第一复位导杆,1016-第一复位弹簧,1017-开槽转轴,1018-涡卷弹簧,1019-固定横杆,11-夹紧机构,111-夹紧块,112-第二连接架,113-海绵底架,114-限位弹簧,115-定位滑块,116-受力圆盘,117-限位立柱,118-第二复位弹簧,119-限位开槽板,1110-定位横杆,1111-第二复位导杆,1112-第三复位弹簧,12-清洁机构,121-清洁海绵柱,122-第一压力传感器,123-导向框,124-水泵,125-进水管,126-补液管,127-储液桶,128-出液管,13-吸附机构,131-第二压力传感器,132-u型导气管,133-吸附软罩,134-气泵。
具体实施方式
36.以下结合说明书附图进一步阐述本发明、并结合说明书附图给出本发明的实施例。
37.实施例1一种自动校准光源的光伏电板底架,如图1-图4所示,包括有支撑底箱1、固定底板2、旋转座3、第一光电传感器41、第二光电传感器42、立式转轴5、安装底箱6、光伏电板7、驱动机构8和支撑机构9,支撑底箱1底部固接有固定底板2,支撑底箱1中间转动式设有立式转轴5,立式转轴5下部固接有旋转座3,旋转座3前侧面左部固接有第一光电传感器41,旋转座3前侧面右部固接有第二光电传感器42,立式转轴5顶端通过螺栓的方式连接有安装底箱6,安装底箱6内通过螺栓的方式安装有光伏电板7,立式转轴5与支撑底箱1之间设有驱动机构8,驱动机构8可实现提供动力,安装底箱6与旋转座3之间设有支撑机构9,支撑机构9可实现对光伏电板7进行支撑。
38.如图2和图3所示,驱动机构8包括有伺服电机81、驱动蜗杆82和从动蜗轮83,支撑底箱1右侧面后部通过螺栓的方式连接有伺服电机81,支撑底箱1后部转动式设有驱动蜗杆82,驱动蜗杆82右端与伺服电机81的输出轴连接,立式转轴5下部固接有从动蜗轮83,从动蜗轮83与驱动蜗杆82啮合。
39.如图2和图4所示,支撑机构9包括有防尘顶罩91、限位块92、固定套筒93、伸缩连杆94和支撑弹簧95,安装底箱6上部通过螺栓的方式连接有用于遮雨防尘的防尘顶罩91,安装底箱6前侧面下部左右对称通过螺栓的方式连接有限位块92,限位块92可实现进行卡位,旋转座3顶部后部左右对称铰接式设有固定套筒93,固定套筒93内滑动式设有伸缩连杆94,伸缩连杆94与安装底箱6转动连接,伸缩连杆94底端与固定套筒93内部之间设有支撑弹簧95。
40.人们按下电源总开关,将本装置上电,首先操作人员通过螺栓将光伏电板7安装于安装底箱6上,限位块92可对光伏电板7卡位,且伸缩连杆94通过支撑弹簧95对安装底箱6进行支撑,支撑弹簧95起到缓冲作用,第一光电传感器41和第二光电传感器42同时对太阳光源进行监控,如第一光电传感器41和第二光电传感器42分别检测到两处光源强度不一致,
第一光电传感器41和第二光电传感器42同时发出信号,控制模块接收信号后控制伺服电机81工作,伺服电机81带动驱动蜗杆82正转,驱动蜗杆82正转带动从动蜗轮83正转,从动蜗轮83正转带动立式转轴5正转,立式转轴5正转带动安装底箱6正转,安装底箱6正转带动光伏电板7正转,光伏电板7正转进行校准光源,同理,第一光电传感器41和第二光电传感器42分别检测到两处光源强度一致,第一光电传感器41和第二光电传感器42再次同时发出信号,控制模块接收信号后控制伺服电机81停止,驱动蜗杆82停止通过从动蜗轮83带动立式转轴5正转,安装底箱6也就停止带动光伏电板7正转,从而如处于晚上时,第一光电传感器41和第二光电传感器42分别检测不到光源强度,第一光电传感器41和第二光电传感器42同时发出信号,控制模块接收信号后控制伺服电机81反转复位,安装底箱6也就带动光伏电板7反转复位至初始位置,进而控制模块控制伺服电机81停止。
41.实施例2在实施例1的基础之上,如图5-图8所示,还包括有防尘机构10,防尘机构10包括有固定短柱101、防尘布102、横移立块103、第一定位块104、第二定位块105、铁质滑动齿条106、定位磁架107、固定导轨108、换向轴109、从动齿轮1010、传动皮带组件1011、第三定位块1012、定位皮带组件1013、第一连接架1014、第一复位导杆1015、第一复位弹簧1016、开槽转轴1017、涡卷弹簧1018和固定横杆1019,安装底箱6后侧面上部左右对称通过螺栓的方式连接有固定短柱101,安装底箱6左右两侧都固接有第一复位导杆1015,第一复位导杆1015上滑动式设有横移立块103,第一复位导杆1015上绕有第一复位弹簧1016,第一复位弹簧1016一端与横移立块103连接,第一复位弹簧1016另一端与安装底箱6连接,左右两侧横移立块103前部之间设有固定横杆1019,固定横杆1019中部固接有防尘布102,防尘布102可实现遮挡光伏电板7,支撑底箱1中部通过螺栓的方式连接有固定导轨108,固定导轨108上滑动式设有第一定位块104,第一定位块104与旋转座3固定连接,固定导轨108上滑动式设有第二定位块105,第二定位块105位于第一定位块104后侧,第二定位块105也与旋转座3固定连接,固定导轨108左部滑动式设有铁质滑动齿条106,支撑底箱1内中部固接有定位磁架107,定位磁架107位于固定导轨108外侧,旋转座3左部中间转动式设有换向轴109,换向轴109左部固接有从动齿轮1010,从动齿轮1010与铁质滑动齿条106啮合,立式转轴5上部转动式设有第三定位块1012,第三定位块1012左部与换向轴109右部之间连接有传动皮带组件1011,传动皮带组件1011由两个皮带轮和皮带组成,一个皮带轮安装于第三定位块1012左部,一个皮带轮安装于换向轴109右部,皮带绕于两个皮带轮之间,安装底箱6后侧面右部与第三定位块1012之间连接有定位皮带组件1013,定位皮带组件1013由三个皮带轮和皮带组成,一个皮带轮安装于第三定位块1012右部,两个皮带轮转动式安装于安装底箱6后侧面右部,皮带绕于三个皮带轮之间,定位皮带组件1013前部通过螺栓的方式连接有第一连接架1014,第一连接架1014与右方横移立块103连接,左右两侧固定短柱101上部之间转动式设有开槽转轴1017,防尘部与开槽转轴1017固定连接,固定短柱101内部与开槽转轴1017外部之间绕接有涡卷弹簧1018。
42.如图5、图9、图10、图11和图12所示,还包括有夹紧机构11,夹紧机构11包括有夹紧块111、第二连接架112、海绵底架113、限位弹簧114、定位滑块115、受力圆盘116、限位立柱117、第二复位弹簧118、限位开槽板119、定位横杆1110、第二复位导杆1111和第三复位弹簧1112,安装底箱6内间隔滑动式连接有四个第二连接架112,第二连接架112外侧固接有夹紧
块111,夹紧块111能与光伏电板7接触,夹紧块111上滑动式设有海绵底架113,当夹紧块111向内移动对光伏电板7限位时,海绵底架113可实现起到缓冲作用,夹紧块111外侧面与海绵底架113外部之间绕接有两根限位弹簧114,安装底箱6内部间隔固接有四根第二复位导杆1111,第二复位导杆1111上滑动式设有定位滑块115,相邻定位滑块115与第二连接架112固定连接,第二复位导杆1111上绕有第二复位弹簧118,第三复位弹簧1112一端与定位滑块115连接,第三复位弹簧1112另一端与安装底箱6连接,安装底箱6中间滑动式设有两根限位立柱117,两根限位立柱117顶端之间固接有受力圆盘116,受力圆盘116与光伏电板7接触,限位立柱117底部与安装底箱6内部之间设有第二复位弹簧118,受力圆盘116后侧面左右对称通过螺栓的方式连接有限位开槽板119,竖向同侧定位滑块115之间固接有定位横杆1110,限位开槽板119套于定位横杆1110上,限位开槽板119与定位横杆1110滑动连接。
43.初始时,涡卷弹簧1018和第一复位弹簧1016处于拉伸状态,当本装置上电后,控制模块控制定位磁架107通磁,定位磁架107对铁质滑动齿条106进行吸附,当伺服电机81正转时,旋转座3正转带动换向轴109正转,换向轴109正转带动从动齿轮1010正转,从动齿轮1010正转通过铁质滑动齿条106自正转,从动齿轮1010自正转带动换向轴109正转,换向轴109正转带动传动皮带组件1011正转,传动皮带组件1011正转带动第三定位块1012正转,第三定位块1012正转带动定位皮带组件1013正转,定位皮带组件1013正转带动第一连接架1014向上移动,第一连接架1014向上移动带动右方横移立块103向上移动,左右两侧横移立块103向上移动使得防尘布102折叠复位,涡卷弹簧1018和第一复位弹簧1016不断在收缩复位,从而从动齿轮1010正转至铁质滑动齿条106最大行程,因涡卷弹簧1018和第一复位弹簧1016的作用,左右两侧横移立块103通过固定横杆1019完全带动防尘布102折叠复位,如旋转座3再次正转带动第一定位块104正转,第一定位块104正转与铁质滑动齿条106接触,由于定位磁架107对铁质滑动齿条106磁力小于摩擦力,第一定位块104正转会带动铁质滑动齿条106缓慢正转,从而如处于晚上时,第一光电传感器41和第二光电传感器42分别检测不到光源强度,第一光电传感器41和第二光电传感器42同时发出信号,控制模块接收信号后控制伺服电机81反转复位,从动齿轮1010反转通过铁质滑动齿条106开始自反转,左右两侧横移立块103通过固定横杆1019带动防尘布102向下拉伸,涡卷弹簧1018和第一复位弹簧1016被拉伸,同理,从动齿轮1010反转至铁质滑动齿条106最大行程,如旋转座3继续反转通过第二定位块105带动铁质滑动齿条106反转复位,光伏电板7反转复位至初始位置,进而控制模块控制伺服电机81停止,如此,可更好对光伏电板7进行防尘保护。
44.当通过螺栓将光伏电板7安装于安装底箱6上时,光伏电板7与受力圆盘116接触,光伏电板7使得受力圆盘116向后移动,第二复位弹簧118被压缩,受力圆盘116向后移动带动限位开槽板119向后移动,限位开槽板119向后移动带动定位横杆1110向内移动,定位横杆1110向内移动带动定位滑块115向内移动,第三复位弹簧1112被拉伸,定位滑块115向内移动带动第二连接架112向内移动,第二连接架112向内移动带动夹紧块111向内移动,夹紧块111向内移动带动海绵底架113向内移动,海绵底架113向内移动对光伏电板7进行限位,限位弹簧114起到缓冲作用,从而人们将光伏电板7拆卸下时,光伏电板7与受力圆盘116脱离,因第二复位弹簧118的作用,光伏电板7带动限位开槽板119向前移动复位,且第三复位弹簧1112的作用,定位滑块115通过第二连接架112带动夹紧块111向外移动复位,海绵底架113也就向外移动复位,如此,可避免光伏电板7产生移动。
45.实施例3在实施例1和实施例2的基础之上,如图13-图15所示,还包括有清洁机构12,清洁机构12包括有清洁海绵柱121、第一压力传感器122、导向框123、水泵124、进水管125、补液管126、储液桶127和出液管128,横移立块103前部之间转动式设有清洁海绵柱121,清洁海绵柱121可实现清理光伏电板7,安装底箱6左部下侧固接有第一压力传感器122,安装底箱6下部通过螺栓的方式连接有导向框123,安装底箱6上部左侧通过螺栓的方式连接有水泵124,防尘顶罩91内侧面固接有出液管128,出液管128与水泵124之间连接有进水管125,安装底箱6后侧面左上部固接有储液桶127,储液桶127可实现储存适量清水,储液桶127与水泵124连通,储液桶127上部连接有补液管126。
46.如图13和图16所示,还包括有吸附机构13,吸附机构13包括有第二压力传感器131、u型导气管132、吸附软罩133和气泵134,安装底箱6内中部固接有第二压力传感器131,安装底箱6内中部固接有u型导气管132,u型导气管132上间隔连通有四个吸附软罩133,吸附软罩133能够吸附光伏电板7,安装底箱6上部中间固接有气泵134,气泵134与u型导气管132连通。
47.首先操作人员通过补液管126往储液桶127内加入适量清水,当横移立块103向上移动时,横移立块103带动清洁海绵柱121向上移动,清洁海绵柱121向上移动对光伏电板7进行清理,从而横移立块103带动清洁海绵柱121向下移动复位,清洁海绵柱121向下移动再次对光伏电板7进行清理,同时,左方横移立块103向下移动复位与压力传感器接触,第一压力传感器122发出信号,控制模块接收信号后控制水泵124工作3秒,水泵124通过进水管125使得出液管128开始喷水,清水也就对光伏电板7进行清理,进而废水通过导向框123排出,3秒后,控制模块控制水泵124停止,如此,可避免光伏电板7上残留灰尘。
48.当通过螺栓将光伏电板7安装于安装底箱6上时,光伏电板7与受力圆盘116接触,光伏电板7使得受力圆盘116向后移动,第二复位弹簧118被压缩,受力圆盘116向后移动挤压第二压力传感器131,第二压力传感器131发出信号,控制模块接收信号后控制气泵134开始工作,气泵134通过u型导气管132使得吸附软罩133对光伏电板7进行吸附,人们将光伏电板7拆卸下时,光伏电板7与受力圆盘116脱离,因第二复位弹簧118的作用,受力圆盘116向前移动复位与第二压力传感器131脱离,第二压力传感器131再次发出信号,控制模块接收信号后控制气泵134停止,吸附软罩133也就停止对光伏电板7进行吸附,如此,可更好对光伏电板7进行限位。
49.如图1、图17和图18所示,还包括有电控箱4,电控箱4安装于支撑底箱1右部前侧,电控箱4内包括有开关电源、电源模块和控制模块,开关电源为该自动校准光源的光伏电板7底架供电,电源模块上通过线路连接有电源总开关,控制模块和电源模块通过电性连接;控制模块上连接有ds1302时钟电路和24c02电路;第一压力传感器122、第二压力传感器131、第一光电传感器41和第二光电传感器42都与控制模块电性连接,伺服电机81、水泵124、气泵134和定位磁架107都与控制模块通过外围电路连接。
50.最后,有必要说明的是:上述内容仅用于帮助理解本发明的技术方案,不能理解为对本发明保护范围的限制;本领域技术人员根据本发明的上述内容所做出的非本质改进和调整,均属本发明所要求保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。