空气调节设备
1.本发明是以下专利申请的分案申请:申请号:201910173036.2,申请日:2019年3月7日,发明名称:空气调节设备的室内机
技术领域
2.本发明涉及空气调节设备的室内机,更详细地说涉及包括用于清扫过滤器的过滤器清扫装置的空气调节设备的室内机。
背景技术:
3.空气调节设备的室内机可通过向室内排出与制冷剂进行热交换的空气来调节所需的室内温度。空气调节设备的室内机可向吸入口吸入室内空气并与制冷剂进行热交换之后从吐出口排出进行热交换的空气。
4.空气调节设备的室内机可根据安装位置划分为吊顶式、壁挂式以及直立式。在直立式室内机中吐出口朝向箱体的前方或侧方,而吸入口朝向箱体后方。
5.由于直立式室内机配置为吐出口朝向室内空间,从而配置于箱体的后方的吸入口朝向室内空间的壁面或拐角面。因此,为了过滤异物质而配置于吸入口的过滤器也可以配置于箱体的后方面。
6.直立式室内机因产品的大小、重量或制冷剂管的配置等原因而难以变更安装位置。因此,使用者需要在箱体的后方空间从箱体中更换过滤器或者清扫过滤器。从而存在因用于安装吸入口的的空间限制给使用者带来不便的问题。
7.中国公开专利cn103008289公开了一种吸入口形成于后方的直立式室内机。该专利公开了如下的内容:在形成于室内机的后方的吸入口配置有过滤器,在过滤器的后方配置有过滤器清扫装置,该过滤器清扫装置配置为可在过滤器上上下移动并使异物吸入到过滤器。
8.但是,上述公开的沿上下方向移动的过滤器清扫装置具有仅清扫沿左右方向限定的区域的结构。具有这种结构过滤器清扫装置需要过滤器向左右方向移动的结构以将过滤器的左右方向均清扫。因此,上述中国公开专利公开了变更过滤器在左右方向上的配置位置的结构。
9.另外,如上所述,在过滤器的配置位置在左右方向上变更的结构中,为了使过滤器在有限的左右区域向左右方向移动而要求过滤器变形。因此,中国公开专利公开了过滤器的形状可在左右侧两端变化的结构。
10.因此,存在如果是不能变更过滤器的配置位置或不能改变过滤器形状的结构,则难以应用上述内容的问题。尤其,在包括集尘装置或除臭过滤器的过滤器结构中,过滤器的配置位置或形状变化非常有限,从而存在上述内容难以应用于多种过滤器,并且也难以应用于将多种过滤器一起使用的结构中的问题。
11.另外,上述中国公开专利的过滤器清扫装置公开了以吸入方式去除附着在过滤器上的异物质的内容。过滤器是以化学方式或物理方式过滤游动的异物质的装置,从而无法
仅用空气的流动消除附着状态的异物质。
技术实现要素:
12.本发明需要解决的第一课题是提供一种能够使在室内机的后方保持配置位置和形状的过滤器保持清洁的空气调节设备的室内机。即,提供一种除了使用者能清扫过滤器之外还额外地设置有用于清扫过滤器的额外的过滤器清扫装置,且所述过滤器清扫装置在固定配置的过滤器上上下移动的同时进行清扫的空气调节设备的室内机。
13.为了掸出附着在过滤器上的灰尘的同时在沿上下方向配置的过滤器模块上上下移动,要求过滤器模块具有与过滤器模块保持规定间隔的同时进行移动的结构。并且,由于过滤器清扫装置的荷重会随着过滤器清扫装置内部包括的构件的增多而增加,因此这对过滤器清扫装置与过滤器模块保持规定间隔的同时沿上下方向的移动会产生较大影响。
14.本发明需要解决的第二课题是提供一种过滤器清扫装置能够与沿上下方向配置的过滤器保持规定间隔的同时上下移动的结构。
15.由于附着在过滤器上的异物质是在流入过滤器的过程中被附着的异物质,因此需要从过滤器掸出附着在过滤器上的缝隙之间的异物质的力,另外,从过滤器脱离的异物质有可能会重新流入过滤器,因此需要用于消除该现象的过程。
16.本发明需要解决的第三课题是提供掸出并去除附着在过滤器上的异物质的空气调节设备的室内机。
17.本发明需要解决的第四课题是提供一种使用者可在室内机的前方位置容易地引入或引出配置于室内机的后方的过滤器清扫装置的灰尘桶的空气调节设备的室内机。
18.过滤器清扫装置需要能够执行多个功能的结构,包括容易装拆灰尘桶的结构,以及在灰尘桶安装于过滤器清扫装置的状态下,形成使异物质流向灰尘桶的空气的流动流路的结构。
19.本发明需要解决的第五课题是用简单的结构执行所述多个功能的空气调节设备的室内机。
20.本发明的课题并不限定于以上提及的课题,本领域的技术人员能够通过以下的记载明确理解未被提及到的其他课题。
21.为了解决所述课题,本发明的空气调节设备的室内机包括:吸入口,配置于后方;过滤器模块,配置于吸入口;过滤器清扫装置,在过滤器模块的后方上下移动;以及导轨,用于引导过滤器清扫装置的上下移动,由此沿上下方向移动的过滤器清扫装置可去除附着在过滤器模块是的灰尘。
22.另外,过滤器清扫装置包括用于移动的移动齿轮、引导辊、用于清扫的搅拌器、灰尘桶,灰尘桶配置于搅拌器的下侧并具有可容纳由搅拌器掸出的灰尘的结构,具有引导辊使过滤器清扫装置紧贴于过滤器模块侧并利用搅拌器清扫过滤器模块的结构,从而过滤器清扫装置能够以通过搅拌器的动作而能够去除过滤器模块的异物质的间隔紧贴于过滤器模块并进行移动。
23.所述过滤器清扫装置还包括用于形成气流的吸入风扇,以使因所述搅拌器的旋转而从所述过滤器模块脱离的异物质流入所述灰尘桶,由此能够将从搅拌器脱离的灰尘送到灰尘桶。
24.所述导轨包括:齿轮轨道,形成有与所述移动齿轮啮合的螺纹;以及辊子轨道,配置于所述齿轮轨道的后方,形成供所述引导辊安装的筋结构,由此过滤器清扫装置能够沿导轨稳定地移动。
25.所述齿轮轨道形成于所述导轨的两侧面,所述移动齿轮包括配置为分别与在所述导轨的两侧面形成的齿轮轨道啮合的一对移动齿轮,由此过滤器清扫装置能够稳定地移动。
26.所述辊子轨道在所述导轨的两侧面分别形成于所述齿轮轨道后方,所述引导辊至少包括一对引导辊以分别安装于在所述导轨的两侧面形成的辊子轨道,由此过滤器清扫装置能够在紧贴于过滤器模块的状态下移动。
27.所述引导辊还包括:上部引导辊,在所述移动齿轮的上侧安装为能够沿所述导轨移动,使所述过滤器清扫装置紧贴于所述过滤器模块侧;以及下部引导辊,在所述上部引导辊的下侧安装为能够沿所述导轨移动,使所述过滤器清扫装置紧贴于所述过滤器模块侧,由此过滤器清扫装置能够稳定地在导轨上移动。
28.所述过滤器清扫装置包括:底盖,形成所述过滤器清扫装置的外观,配置为朝向所述过滤器模块;以及外侧盖,形成所述过滤器清扫装置的外观,在所述底盖的后方与所述底盖结合;在所述底盖形成有沿上下方向形成的导轨槽,所述导轨槽能够容纳所述导轨。
29.所述移动齿轮配置于所述底盖的内侧面且配置为一部分通过形成于所述导轨槽的一侧的移动齿轮孔向所述导轨槽凸出,由此过滤器清扫装置能够稳定地在导轨上移动。
30.所述上部引导辊和所述下部引导辊配置于在所述底盖的外侧面向后方凹陷形成的引导辊槽部且配置为一部分向导轨槽凸出,由此过滤器清扫装置能够稳定地在导轨上移动。
31.所述上部引导辊和所述下部引导辊配置于所述移动齿轮的后方,由此过滤器清扫装置能够稳定地在导轨上移动。
32.在所述导轨的上部配置有用于产生磁力的磁力产生部,所述磁力产生部能够限制所述过滤器清扫装置的上侧移动,所述过滤器清扫装置包括用于检测所述磁力产生部的磁力的霍尔传感器,由此能够限制过滤器清扫装置的上侧移动。
33.所述导轨的下侧包括用于限制所述过滤器清扫装置的下侧方向移动的下端板,所述过滤器清扫装置包括用于检测与所述下端板的接触的下端检测传感器,由此能够限制过滤器清扫装置的下侧移动。
34.所述过滤器清扫装置包括搅拌器槽,所述搅拌器槽形成有供所述搅拌器以能够旋转的方式配置的空间,所述搅拌器槽形成有在一侧与所述灰尘桶连通的连通孔,由此利用搅拌器使从过滤器模块脱离的异物质能够向灰尘桶流入。
35.在所述搅拌器槽设置有除尘器,该除尘器沿所述搅拌器的旋转方向配置于所述连通孔的下端并与所述搅拌器的端部接触,由此附着在搅拌器上的异物质掉落并流入连通孔。
36.所述过滤器清扫装置还包括将所述搅拌器槽连接到所述灰尘桶的连接罩体。
37.所述连接罩体引导所述灰尘桶的引入引出,并形成供所述灰尘桶插入的空间,由此能够引导灰尘桶的插入。
38.所述灰尘桶包括磁性部件,所述磁性部件保持所述灰尘桶安装在所述过滤器清扫
装置的状态,由此能够稳定地保持灰尘桶插入的状态。
39.在所述连接罩体配置有灰尘桶固定构件,所述灰尘桶固定构件在所述灰尘桶插入的空间的端部与所述磁性部件存在引力作用,由此能够稳定地保持灰尘桶插入的状态。
40.所述灰尘桶从所述过滤器清扫装置的侧面插入并具有向后方凸出的曲面形状,由此具有能够向前方引出插入于在后方配置的过滤器清扫装置的灰尘桶的结构。
41.所述灰尘桶包括:灰尘桶体,形成用于容纳异物质的空间;上侧盖,配置于所述灰尘桶体的上侧,形成有灰尘桶吸入口;下侧盖,配置于所述灰尘桶体的下侧,形成有吐出口;灰尘桶过滤器,配置于所述下侧盖内侧,用于过滤从所述吐出口吐出的空气中的异物质;以及灰尘桶过滤器安装部,所述灰尘桶过滤器安装于所述灰尘桶过滤器安装部的内部,所述灰尘桶过滤器安装部容纳于所述下侧盖内侧。
42.所述过滤器清扫装置还包括侧刷部,所述侧刷部配置为在所述搅拌器的一侧与所述过滤器模块的端部接触,由此将过滤器模块的外侧端部的异物质也能够去除。
43.本发明的空气调节设备包括:箱体组件,形成外观,形成有用于吸入空气的吸入口;过滤器组件,配置在所述吸入口,去除吸入的空气中的异物质;以及过滤器清扫组件,设置在所述箱体组件的外侧,去除存在于所述过滤器组件的异物质,所述过滤器清扫组件包括:过滤器清扫装置,去除存在于所述过滤器组件的异物质;移动引导件,用于引导所述过滤器清扫装置的移动;以及电源供给装置,用于向所述过滤器清扫装置供给电源,所述移动引导件包括:导轨,包括形成有与所述过滤器清扫装置的移动齿轮啮合的螺纹的齿轮轨道,引导所述过滤器清扫装置的移动;上侧移动限制部,限制沿所述导轨移动的所述过滤器清扫装置的上侧移动;以及下侧移动限制部,限制所述过滤器清扫装置的下侧移动,在所述导轨形成有用于配置所述电源供给装置的电源线的引导槽,在所述引导槽形成有用于配置使空气中的分子离子化的电极的电极孔。
44.所述过滤器组件包括:第一过滤器模块,配置在所述导轨的一侧;以及第二过滤器模块,配置在所述导轨的另一侧。
45.所述第一过滤器模块覆盖所述吸入口的左侧,所述第二过滤器模块覆盖所述吸入口的右侧,所述导轨沿着上下方向延伸。
46.所述第一过滤器模块以及所述第二过滤器模块分别包括集尘过滤部,所述集尘过滤部通过聚集离子化的空气粒子来过滤空气。
47.所述齿轮轨道包括形成在所述导轨的第一侧面的第一齿轮轨道以及形成在所述导轨的与所述第一侧面相反侧的侧面即第二侧面的第二齿轮轨道,所述引导槽形成在所述第一齿轮轨道和所述第二齿轮轨道之间,且在所述导轨的后侧面向前方侧凹陷形成。
48.所述电极配置为不向所述引导槽的外侧方向凸出。
49.所述电极在不妨碍配置于所述引导槽的所述电源线的范围内凸出。
50.本发明的空气调节设备包括:箱体组件,形成外观,形成有用于吸入空气的吸入口;过滤器组件,配置在所述吸入口,去除吸入的空气中的异物质;以及过滤器清扫组件,设置在所述箱体组件的外侧,去除存在于所述过滤器组件的异物质,所述过滤器清扫组件包括:过滤器清扫装置,去除存在于所述过滤器组件的异物质;移动引导件,用于引导所述过滤器清扫装置的移动;以及电源供给装置,用于向所述过滤器清扫装置供给电源,所述移动引导件包括沿着上下方向延伸的导轨,在所述导轨形成有用于配置与所述过滤器清扫装置
连接的电源线的引导槽,所述过滤器组件包括:第一过滤器模块,配置在所述导轨的左侧,覆盖所述吸入口的左侧;以及第二过滤器模块,配置在所述导轨的右侧,覆盖所述吸入口的右侧,在所述引导槽形成有用于配置使空气中的分子离子化的电极的电极孔。
51.所述第一过滤器模块以及第二过滤器模块分别包括集尘过滤部,所述集尘过滤部通过聚集离子化的空气粒子来过滤空气。
52.所述引导槽在所述导轨的后侧面向前方侧凹陷形成。
53.所述过滤器清扫装置包括:罩体,形成所述过滤器清扫装置的外观;一对移动齿轮,以可旋转的方式安装于所述罩体,使所述罩体移动;以及一对齿轮马达,使所述一对移动齿轮分别旋转。
54.所述导轨包括形成在所述导轨的两侧面的一对齿轮轨道,所述一对齿轮轨道以分别与所述一对移动齿轮啮合的方式形成螺纹,所述引导槽配置在所述一对齿轮轨道之间。
55.所述电极配置为不向所述引导槽的外侧方向凸出。
56.所述电极在不妨碍配置于所述引导槽的所述电源线的范围内凸出。
57.其他实施例的具体内容包含在具体实施方式和附图中。
58.根据本发明的空气调节设备的室内机,能够具有如下的一个或一个以上的效果。
59.第一、本发明的室内机包括在沿上下方向配置的过滤器模块上沿上下方向移动的过滤器清扫装置,并且过滤器清扫装置具有以搅拌器和过滤器模块产生摩擦的同时进行旋转的方式去除附着在过滤器模块上的异物质的结构。由于通过搅拌器的摩擦来掸出附着在过滤器模块上的异物质,因此能够清洁地管理过滤器。由此从吐出口吐出去除异物质后的空气,使得能够保持舒适的室内空间。
60.第二、在过滤器清扫装置中,用于使过滤器清扫装置紧贴于过滤器模块的引导辊在导轨上安装为能够旋转,由此过滤器清扫装置能够在过滤器上稳定地上下移动,并且由于能够保持搅拌器与过滤器模块之间的摩擦,从而还能够使过滤器模块保持清洁的状态。
61.第三、利用过滤器清扫装置所包括的除尘器掸出附着在过滤器上的异物质之后,利用吸入风扇向灰尘桶方向吸入掸掉的异物质,由此能够有效地清扫附着在过滤器上的异物质。
62.第四,引入或引出于过滤器清扫装置的灰尘桶具有向后方凸出的形状且供灰尘桶插入的灰尘桶插入孔形成于过滤器清扫装置的侧面,从而能够向前方方向引出灰尘桶,由此使用者能够在室内机的前方轻松地引出配置于室内机后方的过滤器清扫装置的灰尘桶。
63.第五、紧固于底盖内侧的连接罩体形成供灰尘桶插入的空间的同时,还形成流向灰尘桶的流路以及连接到吸入风扇的结构。从而用简单的结构实现稳定的灰尘桶的固定结构和使异物质顺畅地流入灰尘桶。
64.本发明的效果并不限定于以上提及到的效果,本领域的技术人员能够从权利要求书的记载明确理解未被提及到的其他效果。
附图说明
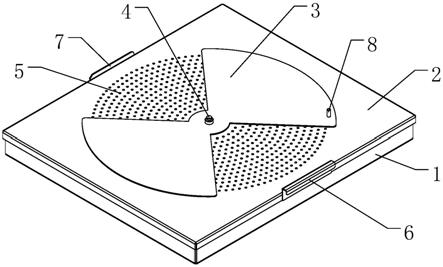
65.图1是本发明一实施例的室内机的前方立体图。
66.图2是本发明一实施例的室内机的后方立体图。
67.图3是本发明一实施例的室内机的侧剖视图。
68.图4是本发明一实施例的箱体组件和门组件的结构的分解立体图。
69.图5是本发明一实施例的去除过滤器清扫装置的状态的室内机的后方立体图。
70.图6是本发明一实施例的移动引导件的上部立体图。
71.图7是图6的沿y1-y1’线剖开的剖视图。
72.图8是本发明一实施例的过滤器清扫装置的后方立体图。
73.图9是本发明一实施例的过滤器清扫装置的后视图。
74.图10是本发明一实施例的过滤器清扫装置的俯视图。
75.图11是本发明一实施例的过滤器清扫装置的后方立体图。
76.图12是本发明一实施例的过滤器清扫装置的主视图。
77.图13是本发明一实施例的过滤器清扫装置的分解图。
78.图14是在图9中去除外侧盖和灰尘桶的状态的后视图。
79.图15是在图14中去除连接罩体的状态的后视图。
80.图16是本发明一实施例的底盖和连接罩体结合的状态的向下视图。
81.图17是本发明一实施例的底盖和连接罩体结合的状态的前方立体图。
82.图18是本发明一实施例的连接罩体的前方立体图。
83.图19是本发明一实施例的连接罩体的后方立体图。
84.图20是本发明一实施例的灰尘桶的立体图。
85.图21是本发明一实施例的灰尘桶的俯视图。
86.图22是本发明一实施例的灰尘桶的仰视图。
87.图23是本发明一实施例的灰尘桶的后视图。
88.图24是本发明一实施例的灰尘桶的分解立体图。
89.图25是将本发明一实施例的灰尘桶体和下侧盖分离的立体图。
90.图26是图25的另一侧面的立体图。
91.图27是用于说明本发明一实施例的灰尘桶体和连接罩体的结合的后视图。
92.图28是图12的沿x1-x1’线剖开的剖视立体图。
93.图29是图12的沿x2-x2’剖开的剖视图。
94.图30是用于说明本发明一实施例的底部和配置于底部的内侧和外侧的电源供给装置的图。
95.图31是用于说明本发明一实施例的过滤器清扫装置沿导轨移动的状态的图。
96.图32是示出本发明一实施例的空气调节设备的主要构成之间的控制关系的框图。
97.图33是示例本发明一实施例的控制部的内部结构的图。
98.图34是示出本发明一实施例的空气调节设备的主要构成之间的控制关系的框图。
99.图35是本发明实施例的清扫模块的内部框图。
100.图36是用于说明在过滤器清扫装置向导轨的上侧方向移动时导轨移动速度的控制或在向导轨的下侧方向移动时导轨移动速度的控制的图。
101.图37是示出本发明实施例的空气调节设备的动作方法的流程图。
102.图38是示出本发明实施例的空气调节设备的动作方法的流程图。
103.附图标记的说明
[0104]ⅰ:箱体组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
11:上部箱体
[0105]
111:吸入口
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12:底部
[0106]
13:下部箱体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
14a、14b:侧面吐出构件
[0107]ⅱ:门组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀⅲ
:送风扇组件
[0108]ⅳ:热交换组件
ꢀꢀꢀꢀꢀꢀꢀꢀⅴ
:加湿组件
[0109]ⅵ:过滤器组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
62a、62b、62c、62d:过滤器模块
[0110]ⅶ:过滤器清扫组件
ꢀꢀꢀꢀꢀꢀꢀ
71:移动引导件
[0111]
711:导轨
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
7121:磁力产生部
[0112]
7122:上端板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
7131:下端板
[0113]
7131a:下端板槽
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
72:过滤器清扫装置
[0114]
721:底盖
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
7211:导轨槽
[0115]
7212:霍尔传感器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
7213a:第一搅拌器槽
[0116]
7213b:第二搅拌器槽
ꢀꢀꢀꢀꢀꢀ
7214:导轨槽部
[0117]
7215a,7215b:辅助辊
ꢀꢀꢀꢀꢀ
7217:电源线固定部
[0118]
72174:引导槽固定部
ꢀꢀꢀꢀꢀꢀ
722:外侧凸起
[0119]
7225:灰尘桶插入孔
ꢀꢀꢀꢀꢀꢀꢀ
723a、723b:搅拌器
[0120]
7231:旋转杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
7232:叶片
[0121]
724a、724b:侧刷部
ꢀꢀꢀꢀꢀꢀꢀ
725a、725b:移动齿轮
[0122]
726a1、726a2、726b1、726b2:引导辊
[0123]
727:灰尘桶
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
7271:上侧盖
[0124]
7272:灰尘桶体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
7273:露出部
[0125]
7274:下侧盖
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
72742:灰尘桶过滤器
[0126]
728:连接罩体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
7281:灰尘桶插入部
[0127]
7282a、7282b:吸入连接管729:吸入风扇
[0128]
7210:下端检测传感器
ꢀꢀꢀꢀꢀ
731:电源线
[0129]
732:电缆卷盘
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
733:电源线盖管
具体实施方式
[0130]
通过下面参照附图详细叙述实施例,会更加明确本发明的优点、特征及其实现方法。然而,本发明不限于以下公开的实施例,可体现为互不相同的多种形状,本实施例仅为了充分公开本发明,并为了向本领域普通技术人员完整地公开本发明的范围而提供,本发明的保护范围仅由权利要求的范围来决定。在整个说明书中相同的附图标记表示相同的构成要素。
[0131]
在整个说明书中,
‘
第一、第二
……’
的表述用于区分构成要素,与构成要素之间的的优先顺序或重要度等无关。附图中标记的上,下,左,右,前以及后的方向标记是为了便于说明,并不限定本发明的范围。因此,若改变基准,则所述方向也可以不同地设定。
[0132]
下面,通过实施例并参照用于说明空气调节设备的室内机的附图,对本发明进行说明。
[0133]
首先,参照图1至图5,概略地对构成本实施例的室内机的组件结构的整体进行说明,并概略地对各个组件的结构进行说明。
[0134]
《整体结构》
[0135]
本实施例的空气调节设备的室内机可包括:箱体组件ⅰ,形成外观,前侧面开口;门组件ⅱ,用于覆盖箱体组件ⅰ的开口的前侧面;送风扇组件ⅲ,配置于箱体组件ⅰ内侧,用于形成空气的流动;热交换组件ⅳ,用于使由送风扇组件ⅲ进行流动的空气与制冷剂进行热交换;过滤器组件ⅵ,用于过滤流向箱体组件ⅰ内侧的空气;过滤器清扫组件ⅶ,用于去除存在于过滤器组件ⅵ的一侧面的异物质;以及加湿组件
ⅴ
,用于向箱体组件ⅰ外部排出加湿的空气。
[0136]
《箱体组件》
[0137]
本实施例的箱体组件ⅰ可包括:上部箱体11,在其后方形成有吸入口111,在内侧形成有用于配置热交换器41的空间;底部12,配置于上部箱体11下侧,形成有用于配置加湿组件
ⅴ
的一部分结构的空间;下部箱体13,用于覆盖底部12的后方和侧方;以及侧面吐出构件14a、14b,配置于上部箱体11与门组件ⅱ之间,形成有用于吐出空气的侧面吐出口141。
[0138]
在上部箱体11的后方,形成吸入口111的部分安装有过滤器组件ⅵ。在上部箱体11的开口的前方配置有门组件ⅱ。上部箱体11配置于下部箱体13的上侧。上部箱体11配置于底部12的上侧。上部箱体11配置于门组件ⅱ的后方。
[0139]
在上部箱体11的内部可形成有用于配置热交换器41、前方送风模块31以及侧方送风模块32a、32b、32c的空间。在上部箱体11的内侧可配置有用于安装热交换器41的热交换器安装构件(未图示)、用于安装前方送风模块31的前方送风模块安装构件(未图示)以及用于安装侧方送风模块32a、32b、32c的侧方送风模块安装构件(未图示)。
[0140]
上部箱体11可在其后方配置有过滤器组件ⅵ。过滤器组件ⅵ包括在上部箱体11后方沿左右方向配置的多个过滤器模块62a、62b、62c、62d。
[0141]
在上部箱体11后方沿左右方向配置的多个过滤器模块62a、62b、62c、62d之间配置有用于引导过滤器清扫装置72的移动的导轨711。在上部箱体11的后方可配置有用于引导过滤器清扫装置72的移动的导轨711。导轨711在上部箱体11后方沿左右方向配置的多个过滤器模块62a、62b、62c、62d的中央,向后方凸出配置。
[0142]
在上部箱体11的后方安装有导轨711的部分可配置有电离部(未图示)。电离部可通过接收高电压来放电,由此使流向吸入口111的空气离子化。
[0143]
上部箱体11配置于侧面吐出构件14a、14b的后方。上部箱体11配置于底部12的上侧。
[0144]
底部12配置于上部箱体11下侧。在底部12的内侧形成有用于配置作为加湿组件
ⅴ
的构成要素的水槽51和加热部52等的空间。在底部12的内侧可配置有供与过滤器清扫组件ⅶ连接的电源线731缠绕的电源供给装置73。
[0145]
底部12可以是前侧面开口的盒子形状。下部箱体13和侧面吐出构件14a、14b的一部分可配置在底部12的外周。在底部12可形成有供与过滤器清扫组件ⅶ连接的电源线731贯通的电源线贯通孔133和供加湿组件
ⅴ
的加湿流路管54贯通的加湿流路管贯通孔(未图示)。在底部12的前侧面可配置有门组件ⅱ。上部箱体11可安装于底部12的上侧。在底部12的上侧可追加安装有用于支撑在底部12上侧配置的结构物的额外的支撑构件121。
[0146]
在底部12的后方可形成有供电源线盖管733贯通的电源线盖管孔122。
[0147]
在上下配置的底部12和上部箱体11相结合的状态下,门组件ⅱ配置于底部12和上
部箱体11的前侧面。
[0148]
下部箱体13可覆盖底部12的侧面和后方。下部箱体13配置于底部12的外侧,能够加强底部12的刚性。在下部箱体13的后方面可配置有用于引导过滤器清扫组件ⅶ的过滤器清扫装置72的移动的导轨711、用于限制过滤器清扫装置72的下侧方向移动的下端板7131以及形成有用于使在底部12内侧与过滤器清扫装置72连接的电源线731向外部露出的电源线孔1312的后方凸出盖131。下端板7131配置于后方凸出盖131的上侧。
[0149]
导轨711和下端板7131可由独立于下部箱体13的另外构件形成。后方凸出盖131是从下部箱体13的后方凸出的结构,在上侧形成有电源线孔1312。电源线孔1312在与形成于下端板7131的下端板槽7131a和形成于导轨711的引导槽7113对应的位置形成。即,电源线孔1312、下端板槽7131a以及引导槽7113可在上下方向上对应的位置配置,以使电源线731稳定地连接。
[0150]
在后方凸出盖131内侧可配置有后述的电源线盖管733的一部分构件,所述电源线盖管733用于使因配置于底部12内侧的电源线731的移动引起的与外部构件之间的摩擦变得最小。
[0151]
从后方凸出盖131的上侧面1311到下部箱体13的上端13a的距离d1可大于后述的过滤器清扫组件ⅶ的过滤器清扫装置72在上下方向上形成的长度d2。
[0152]
在下部箱体13的后方面可形成有供热交换组件ⅳ的制冷剂管(未图示)贯通的制冷剂管孔132。在下部箱体13的后方面可形成有供从外部电源供给电源的电源线贯通的电源线孔1312。
[0153]
侧面吐出构件14a、14b可配置于上部箱体11与门组件ⅱ之间。侧面吐出构件14a、14b可配置于下部箱体13与门组件ⅱ之间。侧面吐出构件14a、14b可覆盖空气调节设备的室内机的侧面的一部分。
[0154]
在侧面吐出构件14a、14b的两侧面可形成有用于向外部吐出由侧方送风模块32a、32b、32c进行流动的空气的侧面吐出口141,所述侧面吐出口141将在后面进行说明。在侧面吐出口141可配置有多个叶片142,用于引导所吐出的空气方向。多个叶片142可与侧面吐出构件14a、14b形成为一体。本实施例的多个叶片142配置为向前方倾斜,由此能够向前方引导向箱体外部吐出空气。
[0155]
《门组件》
[0156]
门组件ⅱ包括:门板21,用于覆盖室内机的前侧面,在一侧形成有前方吐出口22;门移动构件(未图示),用于使门板21向左右方向移动;吐出口盖23,用于开闭在门板21形成的前方吐出口22;以及盖移动构件(未图示),用于使前方吐出口盖23上下移动。
[0157]
本实施例的门移动构件可使门板21在箱体组件ⅰ的前方沿左右方向移动。本实施例的盖移动构件可通过使吐出口盖23移动来开放或闭合前方吐出口22。盖移动构件可使吐出口盖23向前方吐出口22的下侧移动。当前方吐出口22因吐出口盖23移动而开放时,前方送风模块31可向外部露出,所述前方送风模块31将在后面进行说明。前方送风模块31可沿开口的前方吐出口22的前后方向进行移动。
[0158]
在门组件ⅱ还可以包括:用于显示室内机动作状态或用于输入使用者的指令的显示部24;以及用于检测室内空间的条件的相机传感器25。在此,室内空间的条件可包括室内空间的大小、在室内空间的人数、人在室内空间的位置等。
[0159]
考虑到使用者的视线,本实施例的显示部24可配置于前方吐出口22的下侧。本实施例的相机传感器25可配置于门板21的上侧。
[0160]
《送风扇组件》
[0161]
送风扇组件ⅲ包括:用于向室内机的前方吐出空气的前方送风模块31;以及用于向室内机两个侧面方向吐出空气的侧方送风模块32a、32b、32c。本实施例的送风扇组件ⅲ可包括一个前方送风模块31和三个侧方送风模块32a、32b、32c。前方送风模块31和侧方送风模块32a、32b、32c配置于热交换组件ⅳ的前方。
[0162]
前方送风模块31配置于侧方送风模块32a、32b、32c的上侧。前方送风模块31向形成于门板21的前方吐出口22吐出空气。
[0163]
本实施例的前方送风模块31可具有吐出口的朝向向上、下、左、右或者对角方向旋转的结构。因此,在前方送风模块31的吐出口配置于前方吐出口22的前方的状态下,前方送风模块31的用于吐出空气的部分可向上、下、左、右或者对角方向进行旋转,由此可调节所吐出的空气的方向。
[0164]
前方送风模块31可包括前方送风扇311、前方送风马达312以及前方送风扇罩体313。本实施例的前方送风模块31借助前方送风扇311和前方送风罩体313的结构形状使吐出的空气排出至向前很远的距离。
[0165]
侧方送风模块32a、32b、32c配置于前方送风模块31的下侧。本实施例的侧方送风模块32a、32b、32c可以上下配置有多个。各个侧方送风模块32a、32b、32c所吐出的空气可通过侧面吐出口141排出。
[0166]
侧方送风模块32a、32b、32c配置于热交换器41的前方,并可从侧面吐出口141吐出进行过热交换的空气。利用侧方送风模块32a、32b、32c进行流动的空气可通过配置于侧面吐出口141的叶片142流动。
[0167]
《热交换组件》
[0168]
热交换组件ⅳ使流入到上部箱体11内部的室内空气与制冷剂进行热交换。热交换组件ⅳ可包括:用于使与室内空气进行热交换的制冷剂流动的热交换器41;以及制冷剂管(未图示),形成用于使制冷剂流入热交换器41或从交换器41排出制冷剂的制冷剂流路。
[0169]
制冷剂管可包括:供流入到热交换器41的制冷剂流动的制冷剂流入管(未图示);以及供从热交换器41排出的制冷剂流动的制冷剂排出管(未图示)。
[0170]
热交换器41配置于送风扇组件ⅲ的后方。热交换器41配置于吸入口111与吐出口22、141之间,能够使在室内机内部流动的空气进行热交换。热交换器41配置于过滤器组件ⅵ与送风扇组件ⅲ之间。热交换器41可具有与多个侧方送风模块32a、32b、32c和前方送风模块31上下配置的高度对应的长度。
[0171]
热交换器41可配置于上部箱体11的内侧。热交换器41可紧固于在上部箱体11内侧形成的热交换器紧固部。
[0172]
《加湿组件》
[0173]
加湿组件
ⅴ
可向室内机外部吐出加湿的空气。加湿组件
ⅴ
可包括:水槽51,用于存储水;加热部52,接收水槽51的水并进行加热;加湿吐出喷嘴53,形成有用于吐出加热的加湿空气的加湿吐出口(未图示);以及加湿流路管(未图示),用于将在加热部52中加热的加湿空气引向加湿吐出喷嘴53。
[0174]
水槽51和加热部52可配置于底部12的内侧空间。在加湿流路管54的端部形成的加湿吐出喷嘴53可配置于形成侧面吐出口141的部分。因此,通过侧方送风模块32a、32b、32c,向加湿吐出喷嘴54吐出的加湿的空气可与流向侧面吐出口141的空气一起吐出至室内机外部。
[0175]
加湿流路管54可使在配置于底部12内部的加热部52中加热的加湿空气流向加湿吐出喷嘴53。加湿流路管54可连接配置于底部12的加热部52和配置于在上部箱体11所处的高度形成的侧面吐出口141的加湿吐出喷嘴53。
[0176]
《过滤器组件》
[0177]
过滤器组件ⅵ去除向吸入口111流入的空气中的异物质。过滤器组件ⅵ以可移动的方式配置在上部箱体11的后方。过滤器组件ⅵ配置于在上部箱体11的后方形成的吸入口111,能够过滤向吸入口111流入的室内空气。过滤器组件ⅵ以可移动的方式配置于上部箱体11。
[0178]
参照图2,本实施例的过滤器组件ⅵ包括过滤器模块62a、62b、62c、62d,用于去除从吸入口111吸入的空气中的异物质。过滤器组件ⅵ的过滤器模块62a、62b、62c、62d可配置于吸入口111或配置于上部箱体11的侧方面的外侧。
[0179]
本实施例的过滤器组件ⅵ包括:过滤器模块62a、62b、62c、62d,用于去除进行流动的空气中的异物质;过滤器安装构件(未图示),用于安装过滤器模块62a、62b、62c、62d;以及移动构件(未图示),用于变更过滤器安装构件的位置。
[0180]
过滤器模块62a、62b、62c、62d可以是当过滤器模块配置于吸入口时可沿左右形成的过滤器模块的宽度方向引入到过滤器安装构件或从过滤器安装构件引出的结构。
[0181]
本实施例的过滤器模块62a、62b、62c、62d的配置可通过过滤器安装构件和移动构件来变更。即,过滤器模块62a、62b、62c、62d可从配置于在上部箱体11的后方形成的吸入口111的第一位置变更到配置于上部箱体11的侧面的外侧的第二位置。
[0182]
过滤器模块62a、62b、62c、62d在配置于吸入口111的第一位置形成能够使过滤器清扫装置72移动的面。
[0183]
当过滤器模块62a、62b、62c、62d配置于上部箱体11的侧面的外侧时,过滤器模块的宽度方向朝向前方,由此使用者在前方能够轻松地引入或引出过滤器模块。
[0184]
本实施例的过滤器模块62a、62b、62c、62d可包括:第一过滤器模块62a、62b,用于覆盖上部箱体11的吸入口111左侧;以及第二过滤器模块62c、62d,用于覆盖上部箱体11的吸入口111右侧。
[0185]
第一过滤器模块62a、62b可配置为覆盖吸入口111左侧或配置于上部箱体11的左侧面的左侧方。第二过滤器模块62c、62d可配置为覆盖吸入口111右侧或配置于上部箱体11的右侧面的右侧方。
[0186]
当第一过滤器模块62a、62b和第二过滤器模块62c、62d均配置于吸入口111时,形成可使过滤器清扫装置72移动的面。
[0187]
过滤器模块62a、62b、62c、62d可配置为能够拆装于过滤器安装构件。过滤器模块62a、62b、62c、62d能够过滤流向吸入口111的空气中的异物质。本实施例的过滤器模块62a、62b、62c、62d可包括:预滤器621,用于过滤流向吸入口111的空气中的大的灰尘;集尘过滤部(未图示),通过聚集被电离部离子化的空气粒子来过滤空气;以及除臭过滤部(未图示),
用于去除空气中的异味。
[0188]
本实施例的过滤器模块62a、62b、62c、62d安装有预滤器621,且还可以包括安装于过滤器安装构件的过滤器壳体622。在过滤器壳体622沿预滤器621安装的方向形成有多个吸入孔。过滤器壳体622可在安装预滤器621的面上设置有垂直筋6221和水平筋6222。
[0189]
垂直筋6221和水平筋6222彼此形成格子形状能够加强过滤器壳体622的刚性。预滤器621形成为网状,能够过滤从过滤器模块62a、62b、62c、62d流入的空气中的大的异物质。
[0190]
过滤器组件ⅵ的下端部60a可配置于下部箱体13的上侧。过滤器组件ⅵ的下端部60a配置位置比过滤器清扫组件ⅶ的过滤器清扫装置72在沿导轨711进行移动的移动范围内位于最下端时的过滤器清扫装置72的上端72a更靠上侧,关于过滤器清扫装置72将在后面进行说明。
[0191]
在此,过滤器组件ⅵ的下端部60a是指配置于过滤器安装构件61a、61b的下端部和配置于下侧的过滤器模块62b、62d的下端部中更靠下侧配置的部分。因此,如图2所示,过滤器清扫装置72在沿导轨711移动的移动范围内位于最下端时,可变更安装有过滤器模块62a、62b、62c、62d的过滤器安装构件的配置。
[0192]
《过滤器清扫组件》
[0193]
过滤器清扫组件ⅶ可在滤器组件ⅵ后方面沿上下方向移动的同时去除过滤器组件ⅵ外侧的异物质。过滤器清扫组件ⅶ去除附着在过滤器模块62a、62b、62c、62d的预滤器621上的异物质。
[0194]
过滤器清扫组件ⅶ包括:过滤器清扫装置72,在过滤器组件ⅵ后方移动,用于去除附着在过滤器组件ⅵ上的异物质;移动引导件71,用于引导过滤器清扫装置72的移动;以及电源供给装置73,用于向过滤器清扫装置72供给电源。
[0195]
《过滤器清扫组件-移动引导件》
[0196]
下面,参照图5至图7,对本实施例的过滤器清扫组件ⅶ的移动引导件71进行说明。
[0197]
移动引导件71限制过滤器清扫装置72的移动范围。移动引导件71在过滤器清扫装置72的移动范围内引导过滤器清扫装置72的移动。移动引导件71配置于箱体组件ⅰ的后方。移动引导件71配置于上部箱体11和下部箱体13的后方。
[0198]
移动引导件71包括:导轨711,用于引导过滤器清扫装置72的移动;上侧移动限制部712,用于限制沿导轨711移动的过滤器清扫装置72的上侧移动;以及下侧移动限制部713,用于限制沿导轨711移动的过滤器清扫装置72的下侧移动。
[0199]
导轨711配置于上部箱体11和下部箱体13的后方。导轨711在上部箱体11的后方沿上下方向长长地配置。导轨711配置于在上部箱体11的后方左右侧配置的一对过滤器组件ⅵ之间。导轨711可从上部箱体11的上端延伸至配置于下部箱体13的下侧移动限制部713。
[0200]
导轨711可包括:上侧导轨711a,配置在用于配置过滤器模块62a、62b、62c、62d的上部箱体11的后方;以及下侧导轨711b,配置于上侧导轨711a下侧和下部箱体13的后方。
[0201]
上侧导轨711a和下侧导轨711b可以是彼此独立的构件。但是,这仅是一个实施例,上侧导轨711a和下侧导轨711b也可以形成为一个构件。另外,上侧导轨711a可划分为多个。
[0202]
下侧导轨711b配置于下部箱体13的后方,下侧导轨711b的长度可大于过滤器清扫装置72的长度。
[0203]
导轨711包括:齿轮轨道7111a、7111b,形成有与过滤器清扫装置72的移动齿轮725a、725b啮合的螺纹;以及辊子轨道7112a、7112b,供过滤器清扫装置72的引导辊726a1、726a2、726b1、726b2移动。另外,在导轨711形成有用于配置与过滤器清扫装置72连接的电源线731的引导槽7113。
[0204]
导轨711的与箱体组件ⅰ相向的前侧面711a紧固于箱体组件ⅰ。在导轨711的与前侧面711a相反的面即后侧面711b形成有引导槽7113。导轨711在连接前侧面711a和后侧面711b的两侧面配置齿轮轨道7111a、7111b和辊子轨道7112a、7112b。
[0205]
齿轮轨道7111a、7111b可以是齿条形状。另外,与齿轮轨道7111a、7111b啮合的移动齿轮725a、725b可以是小齿轮形状。齿轮轨道7111a、7111b在配置有过滤器模块62a、62b、62c、62d的部分沿上下方向长长地形成。齿轮轨道7111a、7111b可形成在导轨711的两侧面。齿轮轨道7111a、7111b配置于辊子轨道7112a、7112b的前方。
[0206]
辊子轨道7112a、7112b具有从导轨711的后方端部向两侧凸出的筋结构。辊子轨道7112a、7112b配置于齿轮轨道7111a、7111b的后方。辊子轨道7112a、7112b比在齿轮轨道7111a、7111b形成的螺纹的高度更向两侧方向凸出。
[0207]
在导轨711的两侧具备一对齿轮轨道7111a、7111b和一对辊子轨道7112a、7112b。一对辊子轨道7112a、7112b配置于一对齿轮轨道7111a、7111b的后方。一对辊子轨道7112a、7112b分别比一对齿轮轨道7111a、7111b更向两侧方向凸出。因此,从后方观察本实施例的室内机时,齿轮轨道7111a、7111b被辊子轨道7112a、7112b遮挡。
[0208]
辊子轨道7112a、7112b在配置有过滤器模块62a、62b、62c、62d的部分沿上下方向长长地形成。辊子轨道7112a、7112b可形成为具有与齿轮轨道7111a、7111b沿上下形成的长度相同的长度。
[0209]
引导槽7113形成用于配置与过滤器清扫装置72连接的电源线731的空间。引导槽7113在导轨711的后侧面7111b向前方侧凹陷形成。引导槽7113沿导轨711的上下方向长长地形成。引导槽7113的深度大于电源线731的厚度。
[0210]
上侧移动限制部712可限制过滤器清扫装置72的上侧移动。上侧移动限制部712可包括用于产生磁力的磁力产生部7121。作为磁力产生部7121可使用产生磁力的永磁体。磁力产生部7121可从导轨711的上端向下侧隔开规定间隔而配置。磁力产生部7121可配置于导轨711的引导槽7113。磁力产生部7121可产生磁力,以使过滤器清扫装置72的霍尔传感器7212检测到磁力。
[0211]
上侧移动限制部712包括上端板7122,配置于导轨711上端并用于限制过滤器清扫装置72的上侧移动。上端板7122配置于导轨711的上端并与过滤器清扫装置72的上端部相接。上端板7122可通过在导轨711的上端形成与导轨711垂直的面来限制过滤器清扫装置72的移动。
[0212]
从移动引导件71的上端板7122到磁力产生部7121的间隔h1大于从过滤器清扫装置72的上端到霍尔传感器7212的间隔h2。因此,当过滤器清扫装置72向上侧移动时,可通过磁力产生部7121和霍尔传感器7212来限制上侧移动。但是,当霍尔传感器7212发生错误动作时,可通过上端板7122来限制过滤器清扫装置72的移动。
[0213]
下侧移动限制部713包括下端板7131,配置于导轨711下端,用于限制过滤器清扫装置72的下侧移动。下端板7131配置于导轨711的下端并能够与过滤器清扫装置72的下部
相接。下端板7131可与过滤器清扫装置72的下端检测传感器7210接触。
[0214]
下端板7131在导轨711的上端形成与导轨711垂直的面。下端板7131配置于在下部箱体13形成的后方凸出盖131的上侧。
[0215]
下端板7131具有比配置于导轨711的两侧面的导轨711更向两侧方向凸出的结构。但是,在下端板7131形成有下端板槽7131a,以供电源线731从形成于导轨711的引导槽7113的下侧方向贯通。下端板槽7131a形成于引导槽7113的下侧。下端板槽7131a连接引导槽7113和形成在下部箱体13的后方凸出盖131的上侧的电源线孔1312。
[0216]
导轨711可通过额外的紧固部件(未图示)紧固在箱体组件ⅰ的后方。在导轨711形成有用于紧固额外的紧固部件的紧固槽7114。紧固槽7114从形成于导轨711的后方的引导槽7113向前方方向形成。在导轨711可形成有沿上下方向隔开配置的多个紧固槽7114。
[0217]
在导轨711可形成有电极孔7115,该电极孔7115形成用于配置利用放电来使空气中的分子离子化的电极(未图示)的空间。电极孔7115可从形成于导轨711的后方的引导槽7113向前方方向形成。在电极孔7115可配置有电极。电极可配置为不向引导槽7113的外侧方向凸出。电极可在不妨碍配置于导轨711的引导槽7113的电源线731的范围内凸出。
[0218]
《过滤器清扫组件-过滤器清扫装置》
[0219]
下面,参照图8至图29以及图31,对本实施例的过滤器清扫装置进行说明。
[0220]
过滤器清扫装置72以可移动的方式配置于上部箱体11的后方。过滤器清扫装置72可沿导轨711上下移动的同时去除附着在过滤器模块62a、62b、62c、62d的预滤器621上的异物质。
[0221]
下面,参照图8至图29,在过滤器清扫装置72中,以过滤器清扫装置72配置于上部箱体11或下部箱体13的后方时为基准,示出了前、后、左、右、上、下方向。因此,若改变基准,则所述方向关系也会不同。这仅是为了便于说明过滤器清扫装置72,并不限定发明的范围。
[0222]
过滤器清扫装置72包括:罩体721、722,形成外观;移动齿轮725a、725b,以可旋转的方式安装于罩体721、722,用于使罩体721、722移动;齿轮马达7251a、7251b,配置于罩体721、722内侧,用于使移动齿轮725a、725b旋转;引导辊726a1、726a2、726b1、726b2,以可旋转的方式安装于罩体721、722,用于引导罩体721、722的移动;搅拌器723a、723b,以可旋转的方式安装于罩体721、722的一侧,并通过旋转来掸出附着在过滤器模块62a、62b、62c、62d上的异物质;搅拌马达7233,用于使搅拌器723a、723b旋转;灰尘桶727,用于容纳因搅拌器723a、723b的旋转而从过滤器模块62a、62b、62c、62d分离的异物质;连接罩体728,配置于罩体721、722内侧,形成供灰尘桶727插入的空间;吸入风扇729,用于将因搅拌器723a、723b的旋转而从过滤器模块62a、62b、62c、62d分离的异物质吸入到灰尘桶727;以及吸入风扇马达7291,用于使吸入风扇729动作。
[0223]
过滤器清扫装置72还可以包括用于连接连接罩体728和吸入风扇729的吸入风扇连接管7292。
[0224]
罩体721、722形成过滤器清扫装置72的外观。罩体721、722可包括:底盖721,配置为当罩体721、722安装于移动引导件71时朝向过滤器模块62a、62b、62c、62d;以及外侧盖722,配置于底盖721的后方,通过与底盖721结合而在内侧形成用于配置灰尘桶727的空间。
[0225]
底盖721可以是与过滤器模块62a、62b、62c、62d平行的板形状。当过滤器清扫装置72在过滤器模块62a、62b、62c、62d的后方移动时,底盖721可与过滤器模块62a、62b、62c、
62d保持规定的隔开距离。
[0226]
在底盖721形成有导轨槽7211,用于在过滤器清扫装置72可移动地配置于导轨711时供导轨711插入。底盖721整体上呈板形状并在形成导轨槽7211的部分和形成搅拌器槽7213a、7213b的部分可形成有凹陷部。导轨槽7211可形成于将底盖721左右划分的中央。安装于底盖721的引导辊726a1、726a2、726b1、726b2和移动齿轮725a、725b的一部分可露出在导轨槽7211。
[0227]
导轨槽7211沿上下方向形成于底盖721。在导轨槽7211配置有用于检测在导轨711配置的磁力产生部7121的磁力的霍尔传感器7212。霍尔传感器7212可在检测磁力产生部7121的磁力时输出信号。当霍尔传感器7212检测磁力产生部7121的磁力时,过滤器清扫装置72可停止移动。
[0228]
在底盖721形成有用于配置搅拌器723a、723b的搅拌器槽7213a、7213b。在底盖721的导轨槽7211的左侧和右侧形成有一对搅拌器槽7213a、7213b。在底盖721的导轨槽7211的左侧形成第一搅拌器槽7213a,在导轨槽7211的右侧形成第二搅拌器槽7213b。
[0229]
一对搅拌器槽7213a、7213b分别形成从底盖721向后方方向凹陷的槽。底盖721包括搅拌器周面72131,该搅拌器周面72131在形成搅拌器槽7213a、7213b的部分形成从底盖721向后方方向凹陷的槽。底盖721在形成搅拌器槽7213a、7213b的部分包括包围搅拌器723a、723b的外周的搅拌器周面72131;以及使搅拌器723a、723b安装为旋转的安装面72134。
[0230]
搅拌器周面72131可以是向后方方向凸出的呈
‘
u’字形的形状。在搅拌器周面72131的一侧形成有能够与灰尘桶727连通的连通孔72132a、72132b。连通孔72132a、72132b可沿搅拌器周面72131的左右方向配置。连通孔72132a、72132b在沿搅拌器723a、723b的旋转轴形成的搅拌器723a、723b的长度方向上形成。连通孔72132a、72132b形成为在搅拌器周面72131朝向下侧方向。
[0231]
在搅拌器周面72131的一侧可配置有除尘器72135a、72135b,用于掸出附着在搅拌器723a、723b的叶片7232上的异物质。除尘器72135a、72135b配置于在搅拌器周面72131中连通孔72132a、72132b的一侧。除尘器72135a、72135b可配置于在搅拌器周面72131中连通孔72132a、72132b的前方。
[0232]
除尘器72135a、72135b可配置为在搅拌器723a、723b旋转时与搅拌器723a、723b的叶片7232产生摩擦。除尘器72135a、72135b可通过与搅拌器723a、723b产生摩擦来掸出附着在搅拌器723a、723b上的异物质。
[0233]
除尘器72135a、72135b从搅拌器周面72131向配置有搅拌器723a、723b的方向凸出形成。除尘器72135a、72135b为锯齿形状并配置于连通孔72132a、72132b的一侧。除尘器72135a、72135b可以以与连通孔72132a、72132b相同的长度形成。以搅拌器723a、723b的旋转方向为基准,除尘器72135a、72135b可配置于连通孔72132a、72132b的后端。
[0234]
一对搅拌器槽7213a、7213b形成于底盖721的上部。一对搅拌器槽7213a、7213b分别配置于引导辊726a1、726a2、726b1、726b2和移动齿轮725a、725b的上侧。
[0235]
过滤器清扫装置72还包括一对侧刷部724a、724b,配置于一对搅拌器槽7213a、7213b的一侧,用于去除附着在过滤器模块62a、62b、62c、62d上的异物质。在底盖721的一对搅拌器槽7213a、7213b的一侧配置有一对侧刷部724a、724b。一对侧刷部724a、724b可配置
于搅拌器槽7213a、7213b的外侧。一对侧刷部724a、724b可掸出在过滤器模块62a、62b、62c、62d中位于远离导轨711区域的异物质。
[0236]
一对侧刷部724a、724b可划分为配置于第一搅拌器槽7213a的一侧的第一侧刷部724a和配置于第二搅拌器槽7213b的一侧的第二侧刷部724b。第一侧刷部724a配置于在导轨槽7211的左侧配置的第一搅拌器槽7213a的左侧,第二侧刷部724b配置于在导轨槽7211的右侧配置的第二搅拌器槽7213b的右侧。各个第一侧刷部724a和第二侧刷部724b沿上下方向形成的长度小于或等于第一搅拌器槽7213a和第二搅拌器槽7213b沿上下方向形成的长度。多个刷子7241可以沿上下方向配置为等于或小于第一搅拌器槽7213a和第二搅拌器槽7213b沿上下方向形成的长度。
[0237]
在底盖721配置有:使过滤器清扫装置72移动的移动齿轮725a、725b;以及使过滤器清扫装置72紧贴于过滤器模块62a、62b、62c、62d侧的引导辊726a1、726a2、726b1、726b2。移动齿轮725a、725b可以以可旋转的方式安装于底盖721的朝向外侧盖722的内侧面。引导辊726a1、726a2、726b1、726b2可以以能够旋转的方式安装于底盖721的朝向过滤器模块62a、62b、62c、62d的外侧面。移动齿轮725a、725b配置于引导辊726a1、726a2、726b1、726b2的前方。移动齿轮725a、725b配置为比引导辊726a1、726a2、726b1、726b2更与过滤器模块62a、62b、62c、62d相邻。在底盖721可形成有从配置有引导辊726a1、726a2、726b1、726b2的部分向后方凹陷形成的引导辊槽部。
[0238]
在底盖721配置有与在导轨711的两侧面形成的一对齿轮轨道7111a、7111b啮合的一对移动齿轮725a、725b。分别配置于导轨槽7211的左侧和右侧的一对移动齿轮725a、725b的一部分配置为凸出于导轨槽7211。因此,在底盖721的导轨槽7211形成有供移动齿轮725a、725b的一部分贯通的移动齿轮孔7211a。
[0239]
在底盖721形成有分别与形成于导轨711的两侧面的一对辊子轨道7112a、7112b接触的多个引导辊726a1、726a2、726b1、726b2。在多个引导辊726a1、726a2、726b1、726b2中一对配置在移动齿轮725a、725b的上侧而一对配置在移动齿轮725a、725b的下侧。
[0240]
过滤器清扫装置72包括辅助辊7215a、7215b,与过滤器模块62a、62b、62c、62d接触,用于辅助过滤器清扫装置72的上下移动。在底盖721配置有与过滤器模块62a、62b、62c、62d接触的同时进行旋转的辅助辊7215a、7215b。辅助辊7215a、7215b以可旋转的方式配置于底盖721。辅助辊7215a、7215b配置为以与过滤器模块62a、62b、62c、62d所形成的面平行的旋转轴为基准进行旋转。
[0241]
辅助辊7215a、7215b包括:第一辅助辊7215a、7215b,与配置于上部箱体11的左侧的过滤器模块62a、62b、62c、62d接触并进行旋转;以及第二辅助辊7215a、7215b,与配置于上部箱体11的右侧的过滤器模块62a、62b、62c、62d接触并进行旋转。第一辅助辊7215a、7215b和第二辅助辊7215a、7215b可分别在导轨槽7211沿左右方向配置为隔开相同距离。第一辅助辊7215a、7215b和第二辅助辊7215a、7215b可沿在上部箱体11后方以左右配置的过滤器模块62a、62b、62c、62d的垂直筋6221进行移动。
[0242]
在底盖721配置有用于固定电源线731的电源线固定部7217,所述电源线731用于向过滤器清扫装置72供给电源。在底盖721形成有用于配置与电源线731连接的电源部端子7216的电源部端子槽7216a,并配置有用于固定与电源部端子7216连接的电源线的配置的电源线固定部7217。
[0243]
电源线固定部7217防止与沿导轨711移动的过滤器清扫装置72连接的电源线731与导轨711和过滤器模块62a、62b、62c、62d接触或发生干扰。电源线固定部7217可在过滤器模块62a、62b、62c、62d或与导轨711相向的部分,将电源线731固定在底盖721内侧。电源线固定部7217将电源线731沿引导槽7113内侧配置并固定。
[0244]
电源线固定部7217包括:过滤器侧固定部72171、72172,用于防止电源线731向过滤器模块62a、62b、62c、62d方向凸出;轨道侧固定部72173,用于防止电源线731向导轨711方向凸出;以及引导槽固定部72174,用于使电源线731稳定地固定在导轨711的引导槽7113内部。
[0245]
过滤器侧固定部72171、72172包括:过滤器侧固定槽72171,从电源部端子槽7216a向导轨槽7211方向延伸并形成用于配置电源线731的空间;以及过滤器侧固定凸起72172,用于固定配置于过滤器侧固定槽72171的电源线731。本实施例的过滤器侧固定槽72171可从电源部端子槽7216a向导轨槽7211方向水平延伸。过滤器侧固定槽72171在底盖721的与过滤器模块62a、62b、62c、62d相向的面形成。过滤器侧固定凸起72172从过滤器侧固定槽72171的前方端部凸出形成。
[0246]
轨道侧固定部72173包括:轨道侧固定槽72173a、72173b,形成于导轨槽7211的一侧面,形成有用于容纳电源线731的空间;以及轨道侧固定凸起72173c,用于固定配置于轨道侧固定槽72173a、72173b的电源线。
[0247]
轨道侧固定槽72173a、72173b包括:垂直固定槽72173a,连接在过滤器侧固定部72171、72172,并且在与形成于导轨711的侧面方的齿轮轨道7111a、7111b和辊子轨道7112a、7112b相向的部分固定电源线;以及水平固定槽72173b,连接在垂直固定槽72173a,在与形成导轨711的引导槽7113的后方面相向的部分固定电源线。
[0248]
垂直固定槽72173a与过滤器侧固定槽72171垂直地形成,且在与导轨711的侧面相向的导轨槽7211中朝向与导轨711配置的方向相反的方向形成槽。形成于垂直固定槽72173a的轨道侧固定凸起72173c在垂直固定槽72173a的端部凸出,由此防止电源线731从垂直固定槽72173a脱离。
[0249]
水平固定槽72173b形成为与垂直固定槽72173a垂直,并与过滤器侧固定槽72171并排,可形成用于容纳电源线的空间。
[0250]
轨道侧固定部72173防止形成于导轨711的两侧面的齿轮轨道7111a、7111b和辊子轨道7112a、7112b与电源线731发生接触。轨道侧固定槽72173a、72173b是从导轨槽7211的一侧面向内侧方向形成的槽。导轨槽7211是从导轨槽7211的一侧面和后方面向远离导轨711的方向形成的槽。轨道侧固定凸起72173c防止沿轨道侧固定槽72173a、72173b配置的电源线向外部凸出。
[0251]
引导槽固定部72174将从轨道侧固定槽72173b向引导槽7113方向(前方方向)凸出的电源线731固定为沿引导槽7113的下侧方向延伸。
[0252]
引导槽固定部72174将配置于引导槽7113的电源线731固定为沿下侧方向延伸。引导槽固定部72174从导轨槽7211的后方面向导轨711的引导槽7113方向凸出形成。引导槽固定部72174配置于在后方凸出盖131形成的电源线孔1312的上侧。
[0253]
当过滤器清扫装置72沿导轨711上下移动时,引导槽固定部72174配置于在后方凸出盖131形成的电源线孔1312的上侧。因此,即便过滤器清扫装置72沿导轨711上下移动,电
源线731也能够配置在引导槽7113内侧。
[0254]
引导槽固定部72174可形成有一对凸起,所述一对凸起在左右方向上固定电源线731并将电源线731固定为向下侧延伸。引导槽固定部72174可通过轨道侧固定部72173,沿引导槽7113延伸的方向固定容纳于导轨槽7211的内侧的电源线。
[0255]
因此,与过滤器清扫装置72连接的电源线731通过电源线固定部7217,不受过滤器模块62a、62b、62c、62d和导轨711干扰地配置于导轨711的引导槽7113。
[0256]
在底盖721形成有用于缓和因搅拌器723a、723b而发生的振动的搅拌器下侧槽7218a、7218b。搅拌器下侧槽7218a、7218b配置于一对搅拌器槽7213a、7213b的下侧。搅拌器下侧槽7218a、7218b在搅拌器槽7213a、7213b形成的周面72131的下侧形成空间。
[0257]
搅拌器下侧槽7218a、7218b在一对搅拌器槽7213a、7213b的下侧形成空间,由此能够减小因搅拌器723a、723b的动作而引起的振动向底盖721的下部区域传递。
[0258]
外侧盖722配置于底盖721的后方侧。外侧盖722可具有向后方凸出的形状,其与底盖721结合之后能够在内侧配置过滤器清扫装置72的构件。
[0259]
外侧盖722可包括:上侧面7221,用于覆盖过滤器清扫装置72的上侧;下侧面7222,用于覆盖过滤器清扫装置72的下侧;以及周面7223、7224a、7224b,配置于上侧面7221与下侧面7222之间并形成凸出的曲面。周面7223、7224a、7224b可包括:朝向后方配置并形成曲面的后方面7223;以及两侧面7224a、7224b,在后方面7223的两端部折曲并向前方延伸。
[0260]
外侧盖722的上侧面7221覆盖用于配置搅拌器723a、723b的搅拌器周面7223、7224a、7224b的上侧。在外侧盖722的上侧面7221形成有用于容纳导轨711的上侧槽7221a。上侧槽7221a可配置于导轨槽7211的上侧并具有与导轨槽7211相同的截面。
[0261]
在外侧盖722的周面7223、7224a、7224b形成有供灰尘桶727插入的灰尘桶插入孔8225。灰尘桶插入孔7225可形成于外侧盖722的一侧。灰尘桶插入孔7225可在外侧盖722的周面7223、7224a、7224b形成朝向左侧或右侧方向的开口面,由此使用者能够容易引人或引出灰尘桶。
[0262]
本实施例的灰尘桶插入孔7225可形成于周面7223、7224a、7224b的两侧面7224a、7224b中的一个面。本实施例的灰尘桶插入孔7225形成于两侧面7224a、7224b中的左侧面7224a。但是,这仅为一个实施例,灰尘桶插入孔7225也可以形成于两侧面7224a、7224b中的右侧面7224b。
[0263]
在外侧盖722的下侧面7222形成有用于使因吸入风扇729的动作而在过滤器清扫装置72内部流动的空气排出的盖排出口7222b。在外侧盖722的下侧面7222形成有用于容纳导轨711的下侧槽7222a。下侧槽7222a形成于导轨槽7211的下侧,且形成为其截面大于导轨槽7211的截面。
[0264]
过滤器清扫装置72可包括下端检测传感器7210,用于检测过滤器清扫装置72与配置于移动引导件71的下侧的下端板7131的接触。下端检测传感器7210配置于过滤器清扫装置72的下侧端部。下端检测传感器7210包括用于检测因配置位置的变更而引起的冲击的检测杆72101。下端检测传感器7210的检测杆72101向过滤器清扫装置72的下侧凸出配置。检测杆72101的端部配置于在外侧盖722下侧面7222形成的下侧槽7222a。检测杆72101的端部配置为向下侧槽7222a露出。因此,当过滤器清扫装置72向下侧移动时,检测杆72101的端部可先与下端板7131接触。
[0265]
移动齿轮725a、725b与导轨711的齿轮轨道7111a、7111b啮合。移动齿轮725a、725b与齿轮轨道7111a、7111b啮合并旋转,通过旋转可使过滤器清扫装置72沿上下方向移动。移动齿轮725a、725b可以是在周面形成有螺纹的锯齿轮形状。移动齿轮725a、725b可以是小齿轮形状。本实施例的移动齿轮725a、725b可设置有一对且分别与形成于导轨711的两侧面的一对齿轮轨道7111a、7111b啮合。移动齿轮725a、725b可划分为配置于导轨槽7211左侧的第一移动齿轮725a和配置于导轨槽7211右侧的第二移动齿轮725b。
[0266]
第一移动齿轮725a和第二移动齿轮725b分别以可旋转的方式配置于底盖721的内侧面。第一移动齿轮725a和第二移动齿轮725b分别以沿与过滤器模块62a、62b、62c、62d所形成的面垂直的方向形成的旋转轴为基准进行旋转。第一移动齿轮725a和第二移动齿轮725b可配置为分别从导轨槽7211沿左右方向隔开相同的间隔。
[0267]
第一移动齿轮725a和第二移动齿轮725b的一部分可分别通过在导轨槽7211形成的移动齿轮孔7211a配置在导轨槽7211。向导轨槽7211露出的第一移动齿轮725a和第二移动齿轮725b可分别配置为与形成于导轨711两侧面的各个齿轮轨道7111a、7111b啮合。
[0268]
齿轮马达7251a、7251b配置于罩体721、722内侧。齿轮马达7251a、7251b安装于底盖721的内侧面。齿轮马达7251a、7251b可向移动齿轮725a、725b传递旋转力。本实施例的齿轮马达7251a、7251b包括分别与一对移动齿轮725a、725b连接的一对齿轮马达7251a、7251b。
[0269]
本实施例包括与第一移动齿轮725a连接的第一齿轮马达7251a和与第二移动齿轮725b连接的第二齿轮马达7251b。第一齿轮马达7251a和第二齿轮马达7251b分别使第一移动齿轮725a和第二移动齿轮725b向相反方向旋转。第一齿轮马达7251a和第二齿轮马达7251b分别使第一移动齿轮725a和第二移动齿轮725b以相同的速度旋转。
[0270]
过滤器清扫装置72额外地还可以包括连接齿轮,用于将齿轮马达7251a、7251b的旋转力传递至移动齿轮725a、725b。连接齿轮7252a、7252b可通过与齿轮马达7251a、7251b连接来进行旋转,并通过与移动齿轮725a、725b啮合使移动齿轮725a、725b旋转。
[0271]
引导辊726a1、726a2、726b1、726b2与导轨711的辊子轨道7112a、7112b接触。引导辊726a1、726a2、726b1、726b2通过与辊子轨道7112a、7112b接触来辅助过滤器清扫装置72的移动,并防止过滤器清扫装置72从导轨711脱离。引导辊726a1、726a2、726b1、726b2使过滤器清扫装置72紧贴于过滤器模块62a、62b、62c、62d侧。在此,“紧贴”的意思可包括配置为过滤器清扫装置72的至少一部分与过滤器模块62a、62b、62c、62d接触。因此,可包括配置为引导辊726a1、726a2、726b1、726b2使过滤器清扫装置72的搅拌器723a、723b的一部分与过滤器模块62a、62b、62c、62d接触的情形。因此,当引导辊726a1、726a2、726b1、726b2使过滤器清扫装置72紧贴于过滤器模块62a、62b、62c、62d侧时,也可以配置为底盖721与过滤器模块62a、62b、62c、62d隔开规定间隔。
[0272]
引导辊726a1、726a2、726b1、726b2以沿与移动齿轮725a、725b的旋转轴并排方向形成的旋转轴为基准进行旋转。引导辊726a1、726a2、726b1、726b2配置于底盖721的外侧面。引导辊726a1、726a2、726b1、726b2配置于底盖721的外侧面向后方凹陷而形成的引导辊槽部7214。引导辊726a1、726a2、726b1、726b2配置于移动齿轮725a、725b的后方。
[0273]
在移动齿轮725a、725b的上侧和下侧可配置有多个引导辊726a1、726a2、726b1、726b2。多个引导辊726a1、726a2、726b1、726b2可包括配置于移动齿轮725a、725b的上侧的
一对上部引导辊726a1、726a2和配置于移动齿轮725a、725b的下侧的一对下部引导辊726b1、726b2。多个引导辊726a1、726a2、726b1、726b2配置于移动齿轮725a、725b的上下方向,由此防止过滤器清扫装置72的荷重作用于移动齿轮725a、725b。
[0274]
移动齿轮725a、725b从导轨槽7211的左侧端部7211a或右侧端部7211b向导轨槽7211的中心方向凸出的长度dp1大于引导辊726a1、726a2、726b1、726b2从导轨槽7211的左侧端部7211a或右侧端部7211b向导轨槽7211的中心方向凸出的长度dp2。
[0275]
一对移动齿轮725a、725b之间的间隔g1可小于左右配置的引导辊726a1、726a2、726b1、726b2之间的间隔g2。
[0276]
搅拌器723a、723b以可旋转的方式安装于罩体721、722。搅拌器723a、723b可以以沿左右方向形成的旋转轴为基准进行旋转。搅拌器723a、723b可配置为与过滤器模块62a、62b、62c、62d的外侧接触。搅拌器723a、723b可通过旋转来掸出附着在过滤器模块62a、62b、62c、62d上的异物质。
[0277]
搅拌器723a、723b包括配置于过滤器清扫装置72的左侧的第一搅拌器723a和配置于过滤器清扫装置72的右侧的第二搅拌器723b。第一搅拌器723a配置于在导轨槽7211的左侧形成的第一搅拌器槽7213a。第二搅拌器723b配置于在导轨槽7211的右侧形成的第二搅拌器槽7213b。
[0278]
第一搅拌器723a和第二搅拌器723b分别包括:旋转杆7231,所述旋转杆7231以与过滤器模块62a、62b、62c、62d的外侧面平行的旋转轴为基准进行旋转;以及多个叶片7232,从旋转杆7231的外周面向径向凸出。
[0279]
旋转杆7231的两端部可在搅拌器槽7213a、7213b的安装面72134固定为可旋转,旋转杆7231的一端部可与使搅拌器723a、723b旋转的搅拌马达7233连接。过滤器清扫装置72还可以包括搅拌器齿轮7234,用于将搅拌马达7233的旋转力传递至搅拌器723a、723b。搅拌器齿轮7234可配置有多个,以使向一对搅拌器723a、723b的每一个传递搅拌马达7233的驱动力。
[0280]
多个叶片7232沿旋转杆7231的周面配置。多个叶片7232沿旋转杆7231的周面隔开规定间隔而配置。多个叶片7232可沿旋转杆7231的长度方向和圆周方向排列。当多个叶片7232沿过滤器模块62a、62b、62c、62d方向配置时,可与过滤器模块62a、62b、62c、62d接触。因此,当搅拌器723a、723b旋转时,叶片7232的端部可与过滤器模块62a、62b、62c、62d的外侧面相接。
[0281]
当多个叶片7232沿过滤器模块62a、62b、62c、62d方向配置时,可与过滤器模块62a、62b、62c、62d接触。多个叶片7232可在旋转杆7231旋转时与过滤器模块62a、62b、62c、62d接触。多个叶片7232可在旋转杆7231旋转时与在搅拌器槽7213a、7213b向内侧凸出形成的除尘器72135a、72135b接触。
[0282]
当旋转杆7231旋转时,多个叶片7232可通过与过滤器模块62a、62b、62c、62d接触来掸出附着在过滤器模块62a、62b、62c、62d上的异物质。当旋转杆7231旋转时,多个叶片7232可通过与除尘器72135a、72135b接触来掸出附着于多个叶片7232的异物质。
[0283]
本实施例的过滤器清扫装置72包括侧刷部724a、724b,配置于搅拌器723a、723b的一侧,用于清扫过滤器模块62a、62b、62c、62d外侧。侧刷部724a、724b配置为在搅拌器723a、723b的一侧与过滤器模块62a、62b、62c、62d的端部接触。侧刷部724a、724b包括配置于第一
搅拌器723a的一侧的第一侧刷部724a和配置于第二搅拌器723b的一侧的第二侧刷部724b。第一侧刷子配置于第一搅拌器723a的左侧。第二侧刷子7241配置于第二搅拌器723b的右侧。
[0284]
第一侧刷部724a和第二侧刷部724b分别包括多个刷子7241,所述多个刷子7241向前方方向凸出并与过滤器模块62a、62b、62c、62d的外侧接触。多个刷子7241沿上下方向配置在形成各个第一侧刷部724a和第二侧刷部724b的部分。
[0285]
各个第一侧刷部724a和第二侧刷部724b沿上下方向形成的长度大于各个第一搅拌器723a和第二搅拌器723b的直径的长度。
[0286]
灰尘桶727通过插入到在连接罩体728形成的灰尘桶插入部7281来收纳用搅拌器723a、723b从过滤器模块62a、62b、62c、62d分离的异物质。灰尘桶727可通过形成在过滤器清扫装置72的侧面的灰尘桶插入孔7225安装于在连接罩体728形成的灰尘桶插入部7281。
[0287]
当从上侧或下侧观察灰尘桶727时,灰尘桶727呈向后方凸出的曲面形状。灰尘桶727可从配置于过滤器模块62a、62b、62c、62d的后方的过滤器清扫装置72的侧面插入,并具有向后方凸出的形状。
[0288]
灰尘桶插入孔7225形成于过滤器清扫装置72的侧面,灰尘桶727具有向后方凸出的形状,从而可向前方方向引出配置于箱体的后方侧的灰尘桶727。这种结构可容易地在室内机的前方面或侧方面引出或插入灰尘桶727。
[0289]
灰尘桶727在插入灰尘桶插入部7281的方向上从插入始端部727a到插入终端部727b其截面积逐渐增加。参照图23,灰尘桶727的插入始端部727a的上下方向的长度dv1小于灰尘桶727的插入终端部727b的上下方向的长度dv2。参照图22,灰尘桶727的插入始端部727a的前后方向的长度dl1可与灰尘桶727的插入终端部727b的前后方向的长度dl2相同。
[0290]
在此,当灰尘桶727从过滤器清扫装置72的一侧插入时,插入始端部727a可以是最先通过灰尘桶插入孔7225的部分,插入终端部727b可以是最后插入到灰尘桶插入孔7225的部分。
[0291]
灰尘桶727形成有沿上侧方向吸入空气的灰尘桶吸入口72711a、72711b和沿下侧方向吐出空气的灰尘桶吐出口72741。本实施例的灰尘桶吸入口72711a、72711b可形成有一对,分别与一对搅拌器槽7213a、7213b连接。
[0292]
灰尘桶吸入口72711a、72711b的大小可与形成于灰尘桶插入部7281的灰尘桶插入部上侧孔72816a、72816b的大小相同。当灰尘桶727插入到灰尘桶插入部7281时,灰尘桶吸入口72711a、72711b的两端部72711a1、72711b1可配置于在灰尘桶插入部7281形成的灰尘桶插入部上侧孔72816a、72816b的两侧端部所对应的位置。
[0293]
灰尘桶吐出口72741的大小可与形成于灰尘桶插入部7281的灰尘桶插入部下侧孔72813a的大小相同。当灰尘桶727插入到灰尘桶插入部7281时,灰尘桶吐出口72741的两端部72741a、72741b可配置于在灰尘桶插入部7281形成的灰尘桶插入部下侧孔72813a的两侧端部72741a、72741b所对应的位置。灰尘桶727包括:灰尘桶体7272,形成用于容纳异物质的空间;上侧盖7271,配置于灰尘桶体7272的上侧并形成有灰尘桶吸入口72711a、72711b;以及下侧盖7274,配置于灰尘桶体7272的下侧并形成有吐出口72741。灰尘桶727包括灰尘桶过滤器72742,配置于下侧盖7274,用于过滤所吐出的空气中的异物质。灰尘桶727还可以包括灰尘桶过滤器安装部72743,供灰尘桶过滤器72742安装并容纳于下侧盖7274。灰尘桶727
还可以包括露出部7273,当灰尘桶727插入到过滤器清扫装置72内部时所述露出部7273露出在罩体721、722的一侧。
[0294]
上侧盖7271覆盖灰尘桶727的上侧面。在上侧盖7271形成有向上侧方向开口的一对灰尘桶吸入口72711a、72711b。上侧盖7271具有向后方凸出的形状。上侧盖7271可包括通过在灰尘桶727的插入始端部向下侧弯曲来覆盖灰尘桶体7272的端部的弯曲部72712。
[0295]
灰尘桶体7272的上侧与上侧盖7271结合,灰尘桶体7272的下侧与下侧盖7274结合。灰尘桶体7272的内部为中空,形成用于容纳异物质的空间。在灰尘桶体7272的上侧可形成有与一对灰尘桶吸入口72711a、72711b对应的两个灰尘桶体吸入孔72721a、72721b。灰尘桶体7272的与下侧盖7274结合的下侧开口,与下侧盖7274的空间连通。
[0296]
灰尘桶体7272可由透明材质构成,使得能够掌握存在于内部空间的异物质。灰尘桶体7272可在灰尘桶727的插入方向终端部与露出部7273紧固。
[0297]
灰尘桶体7272具有向后方凸出的形状。灰尘桶体7272具有从插入终端部到插入始端部其截面积逐渐减小的形状。灰尘桶体7272的下端部具有从灰尘桶727的插入终端部727b到插入始端部727a向上侧逐渐倾斜的形状。
[0298]
在灰尘桶体7272的灰尘桶727的插入方向始端部可配置有至少一个磁性部件72722、72723。在灰尘桶体7272的灰尘桶727的插入方向始端部可包括:用于在下侧盖7274产生磁力的第一磁性部件72722和用于在供灰尘桶727插入的连接罩体728产生磁力的第二磁性部件72723。第一磁性部件72722和第二磁性部件72723可配置于灰尘桶体7272与上侧盖7271的弯曲部72712之间。第二磁性部件72723保持灰尘桶727完全插入到过滤器清扫装置72内侧的状态。
[0299]
在此,“完全插入”是指已将灰尘桶727的构件中需要插入到过滤器清扫装置72内侧的部分均插入到过滤器清扫装置72内侧的状态。因此,在灰尘桶727完全插入的状态下,灰尘桶727无法再向过滤器清扫装置72内部插入。
[0300]
在灰尘桶727完全插入到过滤器清扫装置72内侧的状态下,露出部7273的一部分露出在过滤器清扫装置72的外侧。露出部7273可在使用者向过滤器清扫装置72插入灰尘桶727或从过滤器清扫装置72引出灰尘桶727时作为把手发挥功能。可用额外的紧固构件来7275紧固露出部7273与灰尘桶体7272的终端部。
[0301]
露出部7273包括:露出部盖72731,配置为当灰尘桶727插入到过滤器清扫装置72时露出在过滤器清扫装置72的一侧;紧固部72732,通过紧固构件7275来与灰尘桶体7272紧固;以及下侧盖连接部72733,配置于紧固部72732的下侧并与下侧盖7274的一侧连接。
[0302]
露出部盖72731可以是带形状以与灰尘桶插入孔7225对应。当灰尘桶727安装在过滤器清扫装置72时,紧固部72732和下侧盖连接部72733配置于过滤器清扫装置72内侧。下侧盖连接部72732可形成有供下侧盖7274的终端凸起72745插入的槽部。
[0303]
下侧盖7274的上侧与灰尘桶体7272结合。下侧盖7274的下侧形成有使空气流向吸入风扇729的吐出口72741。在下侧盖7274的内侧可配置有灰尘桶过滤器72742。在下侧盖7274的吐出口72741可配置有灰尘桶过滤器72742。
[0304]
下侧盖7274可配置有供灰尘桶过滤器72742安装的灰尘桶过滤器安装部72743。在下侧盖7274可配置有与在灰尘桶体7272的一侧配置的第一磁性部件72722存在引力作用的对应构件72744。
[0305]
下侧盖7274的一侧可通过终端凸起72745插入到露出部7273而被固定,而另一侧的对应构件72744可由灰尘桶体7272的第一磁性部件72722的磁力而被固定。对应构件72744是与第一磁性部件72722存在引力作用的构件,可使用铁或磁性物质。对应构件72744可配置于下侧盖7274的始端部。对应构件72744可配置于下侧盖7274与灰尘桶过滤器安装部72743之间。
[0306]
连接罩体728配置于罩体721、722内侧并用于引导灰尘桶727的引入或引出。连接罩体728连接搅拌器槽7213a、7213b和灰尘桶727。连接罩体728连接灰尘桶727和吸入风扇729。
[0307]
连接罩体728可固定并配置于罩体721、722的内侧。连接罩体728可固定于底盖721的内侧面。连接罩体728包括:供灰尘桶727插入的灰尘桶插入部7281;以及用于连接搅拌器槽7213a、7213b和插入到灰尘桶插入部7281的灰尘桶727的吸入连接管7282a、7282b。
[0308]
灰尘桶插入部7281可具有与灰尘桶727的外形对应的形状,使得灰尘桶727插入。即,灰尘桶插入部7281可具有围绕向后方凸出形成的灰尘桶727的外周的形状。灰尘桶插入部7281的供灰尘桶727插入的前方面72811和后方面72812可形成为凸出的曲面。灰尘桶插入部7281的下侧面72813形成为沿灰尘桶727插入的方向向上侧倾斜。
[0309]
在灰尘桶插入部7281配置有插入部辅助辊72814a、72814b,使得灰尘桶727的引入或引出容易。插入部辅助辊72814a、72814b可分别配置于灰尘桶插入部7281的前方面和后方面。
[0310]
在灰尘桶插入部7281的端部可配置有与在灰尘桶727配置的磁性部件72722存在引力作用的灰尘桶固定构件72815。灰尘桶固定构件72815配置于灰尘桶插入部7281的端部,使得在灰尘桶727完全插入到灰尘桶插入部7281时利用磁力固定灰尘桶727。
[0311]
在灰尘桶插入部7281的上侧配置有吸入连接管7282a、7282b。在配置于灰尘桶插入部7281的上侧的上侧面72816可形成有与一对吸入连接管7282a、7282b连通的一对灰尘桶插入部上侧孔72816a、72816b。
[0312]
灰尘桶插入部7281的下侧可与和吸入风扇729的一侧连接的吸入风扇连接管7292连接。在灰尘桶插入部7281的下侧面72813可形成有与灰尘桶727的吐出口72741对应的灰尘桶插入部下侧孔72813a。灰尘桶插入部下侧孔72813a可使灰尘桶727内部和吸入风扇连接管7292彼此连通。灰尘桶插入部7281的下侧面72813可配置为从灰尘桶727插入的始端部到终端部向上侧逐渐倾斜。
[0313]
当灰尘桶727完全插入到灰尘桶插入部7281时,灰尘桶727的上侧盖7271可与灰尘桶插入部7281的上侧面72816接触,灰尘桶727的下侧盖7274可与灰尘桶插入部7281的下侧面72813接触。
[0314]
吸入连接管7282a、7282b配置于灰尘桶插入部7281的上侧。吸入连接管7282a、7282b连接灰尘桶插入部7281和一对搅拌器槽7213a、7213b。吸入连接管7282a、7282b可包括分别与一对搅拌器槽7213a、7213b连接的一对吸入连接管7282a、7282b。一对吸入连接管7282a、7282b安装于形成有一对搅拌器槽7213a、7213b的搅拌器周面72131的一侧。一对吸入连接管7282a、7282b可通过分别形成于一对搅拌器槽7213a、7213b的连通孔72132a、72132b来分别与一对搅拌器槽7213a、7213b连通。
[0315]
一对吸入连接管7282a、7282b可由灰尘桶插入部7281和一个结构物形成。连接罩
体728包括用于与底盖721和搅拌器槽7213a、7213b的搅拌器周面72131紧固的多个紧固部7283。在一对吸入连接管7282a、7282b的与搅拌器槽7213a、7213b的搅拌器周面72131接触的部分,形成有能够夹入在搅拌器槽7213a、7213b的搅拌器周面72131形成的紧固凸起72133的紧固钩7284。连接罩体728可通过紧固钩7284和形成于搅拌器槽7213a、7213b的搅拌器周面72131的紧固凸起72133而固定在底盖721。这能够在连接罩体728被额外的紧固构件(未图示)紧固在底盖721之前,使连接罩体728固定在底盖721。
[0316]
吸入风扇729形成从搅拌器槽7213a、7213b到灰尘桶727的气流。吸入风扇729由吸入风扇马达7291进行旋转。当吸入风扇729旋转时,可向灰尘桶727吸入存在于搅拌器槽7213a、7213b的空气和异物质。吸入风扇729配置于灰尘桶727的下侧。吸入风扇729可具有从上侧吸入空气并向周面的下侧方向吐出空气的结构。吸入风扇马达7291配置于吸入风扇729的下侧。
[0317]
吸入风扇729配置于一对齿轮马达7251a、7251b之间。由吸入风扇729吐出的空气可流向配置于周面的齿轮马达7251a、7251b。由吸入风扇729进行流动的空气可通过形成于外侧盖722的下侧面7222的盖排出口7222b向过滤器清扫装置72的外部排出。
[0318]
吸入风扇连接管7292连接灰尘桶727的吐出口72741和吸入风扇729。吸入风扇连接管7292与连接罩体728的灰尘桶插入部7281的下侧面连接。与灰尘桶插入部7281的下侧连接的吸入风扇连接管7292的上侧可倾斜形成,以便能够与灰尘桶插入部7281的下侧面对应。
[0319]
吸入风扇连接管7292形成越靠近吸入风扇729其内部截面积越小的方向。即,吸入风扇连接管7292的内部截面积从与灰尘桶插入部7281连接的上侧到与吸入风扇729连接的下侧逐渐减小。
[0320]
在吸入风扇连接管7292可配置有吸入栅格72921,用于去除流向吸入风扇729的异物质。当灰尘桶727从灰尘桶插入部7281分离时,吸入栅格72921可去除流向吸入风扇729的异物质。吸入栅格72921可配置于吸入风扇连接管7292的上端。
[0321]
过滤器清扫装置72可包括用于配置电路的印刷电路板74,所述电路利用从电源线731接收到的电源来控制过滤器清扫装置72的动作。印刷电路板74配置于罩体721、722的内侧。印刷电路板74可在配置供灰尘桶727插入的灰尘桶插入孔7225的相反侧配置。
[0322]
《过滤器清扫组件-电源供给装置》
[0323]
参照图11、图12、图28至图31,对本实施例的过滤器清扫组件的电源供给装置进行说明。
[0324]
电源供给装置73向在上部箱体11和下部箱体13的后方上下移动的过滤器清扫装置72供给电源。电源供给装置73包括:电源线731,通过与过滤器清扫装置72连接来供给电源;电缆卷盘732,通过沿外周面缠绕电源线731来保持电源线731的张力;以及电源线盖管733,用于使配置于底部12内侧的电源线731与其他构件的摩擦最小。
[0325]
电源线731与过滤器清扫装置72的电源部端子7216连接。电源线731固定在过滤器清扫装置72的电源线固定部7217,并在过滤器清扫装置72移动时配置于导轨711的引导槽7113。
[0326]
电源线731可在由电缆卷盘732来保持张力的情况下配置于导轨711的引导槽7113内部。电缆卷盘732可具有沿外周面缠绕电源线731并用规定的力拉拽电源线731的结构。
[0327]
本实施例的电缆卷盘732配置于底部12的内侧。电缆卷盘732可配置于移动引导件71的下侧而保持电源线731的张力。电缆卷盘732配置于导轨711的下侧并向下侧方向拉拽电源线731。
[0328]
电源线盖管733配置于电缆卷盘732与导轨711之间。电源线盖管733防止配置于底部12内侧的电源线731与配置于底部12内侧的其他构件发生摩擦。
[0329]
电源线盖管733从电缆卷盘732的外周面的一侧向形成于下部箱体13的后方凸出盖131延伸。电源线盖管733从底部12内侧向底部12外侧的下部箱体13的后方凸出盖131延伸且可在局部区间形成有弯管(curved tube)。
[0330]
电源线盖管733可在配置于后方凸出盖131的部分形成有向上侧延伸的直线管。电源线盖管733可在配置于后方凸出盖131内侧的上端部7331形成有向上侧延伸的直线管。电源线盖管733的上端部7331可配置于底部12的后方,且配置于后方凸出盖131的内侧。电源线盖管733的上端部7331可与后方凸出盖131的上侧面1311连接。配置于电源线盖管733的上端部7331内部的电源线731可通过后方凸出盖131的电源线孔1312向下部箱体13外部凸出。
[0331]
图32是示出本发明一实施例的空气调节设备的主要构件之间的控制关系的框图。
[0332]
下面,参照附图进行说明。本发明一实施例的空气调节设备可包括:传感器部121,具有用于检测各种数据的一个以上的传感器;存储器1256,用于存储各种数据;通信部1270,用于与其他电子设备进行无线通信;控制部1240,用于对清扫过滤器的过滤器清扫组件ⅶ、加湿组件
ⅴ
以及空气调节设备的整体动作进行控制;以及驱动部1280,根据所述控制部1240的控制,对设置于箱体组件ⅰ内部的热交换器、阀、风向调节部件等的动作进行控制。
[0333]
例如,传感器部1215可具有用于检测室内外的温度的一个以上的温度传感器和用于检测湿度的湿度传感器、用于检测空气质量的灰尘传感器等。
[0334]
温度传感器可通过设置于吸入口来测量室内温度,可通过设置于箱体组件ⅰ的内部来测量热交换温度,可通过设置于吐出口的任意一侧来测量所吐出的空气的温度,可通过设置于制冷剂管来测量制冷剂温度。
[0335]
尤其,传感器部1215可检测与过滤器清扫装置72的距离。具体而言,可通过将传感器部1215设置于导轨711来检测与罩体721、722的距离。为此,传感器部1215可设置有上端距离传感器1215a和下端距离传感器1215b。
[0336]
上端距离传感器1215a位于导轨711的上端,在过滤器清扫装置72向上侧方向移动时可检测与过滤器清扫装置72的距离。
[0337]
下端距离传感器1215b位于导轨711的下端,在过滤器清扫装置72向下侧方向移动时可检测与过滤器清扫装置72的距离。
[0338]
另一方面,控制部1240可基于由传感器部1215检测到的距离信息,控制过滤器清扫装置72的移动速度。
[0339]
视觉模块1900可通过包括至少一个摄像机来拍摄室内环境。摄像机是用于拍摄空气调节设备的周边、外部环境等的设备,考虑到拍摄效率,也可以在各个部位安装多个这种摄像机。
[0340]
例如,摄像机可包括:至少一个光学透镜;包括由穿过光学透镜的光成像的多个光电二极管(photodiode,例如,pixel:像素)的图像传感器(例如,cmos image sensor,cmos:
complementary metal-oxide-semiconductor:互补金属氧化物半导体);以及基于从光电二极管输出的信号,构成图像的数字信号处理器(dsp:digital signal processor)。数字信号处理器不仅能够生成静止图像而且还能够生成通过由静止图像构成的帧来构成的视频。
[0341]
另一方面,通过摄像机的拍摄而获得的图像可存储于存储器1256中。
[0342]
视觉模块1900配置于上部箱体11,并且根据情况也可以设置于箱体的上侧板。另外,视觉模块1900也可以在未动作时容纳于箱体组件ⅰ内部并在升降之后进行动作。
[0343]
显示器模块1000可以通过图像显示与使用者的输入指令对应的信息、与使用者的输入指令对应处理结果、动作模式、动作状态、错误状态等。
[0344]
根据实施例,显示器模块1000可通过与触摸板彼此建立层间结构来构成触摸屏。在此情况下,显示器除了输出装置之外还可以用作可通过使用者的触摸来输入信息的输入装置。
[0345]
根据实施例,显示器模块1000还可以包括照明部,该照明部根据点灯与否、点灯颜色、闪烁与否输出动作状态。
[0346]
根据实施例,空气调节设备额外地还可以包括操作部1230。操作部1230可包括按键、开关、触摸输入部件中的至少一个,并可向空气调节设备输入使用者的指令或规定的数据。
[0347]
存储器1256用于记录空气调节设备的动作所需的各种信息,可存储用于控制动作的控制数据、关于动作模式的数据、从传感器部1215检测到的数据、通过通信部1270接收或发出的数据等。
[0348]
存储器1256可包括易失性或非易失性存储介质。存储介质存储微处理器(micro processor)可读的数据,可包括hdd(hard disk drive:硬盘驱动器)、ssd(solid state disk:固态硬盘)、sdd(silicon disk drive:硅磁盘驱动器)、rom、ram、cd-rom、磁带、软盘、光数据存储装置等。
[0349]
另一方面,存储器1256中可存储用于识别语音的数据,控制部1240对通过音频输入部1220接收的使用者的语音输入信号进行处理并执行语音识别程序。
[0350]
另一方面,简单的语音识别可由空气调节设备执行,如自然语音处理等的高维度的语音识别可由语音识别系统来执行。
[0351]
例如,当接收到包括预先设定的调用字的提醒(wake up)语音信号时,空气调节设备可转换到用于接收语音指令的状态。在此情况下,空气调节设备可以仅执行识别调用字语音输入与否的语音识别程序,之后的对使用者输入的语音的语音识别可通过语音识别服务器系统来执行。
[0352]
由于空气调节设备的系统资源有限,因此复杂的自然语音识别以及处理可通过语音识别服务器系统来执行。
[0353]
根据实施例,存储器1256可存储使用者输入的语音指令的声音文件,存储的声音文件可通过通信部1270向语音识别服务器系统传送。另外,所述存储的声音文件经过预先设定的时间或执行预先设定的动作之后可被删除。
[0354]
通信部1270包括一个以上的通信模块,并可根据规定的通信方式通过与其他电子设备进行无线通信来收发各种信号。
[0355]
在此,规定通信方式可以是无线高保真(wi-fi)通信方式。与此对应地,空气调节设备所具备的通信模块可以是无线高保真通信模块,但是本发明不限定于通信方式。
[0356]
或者,空气调节设备可包括其他种类的通信模块或具备多个通信模块。例如,空气调节设备可包括nfc模块、紫峰协议(zigbee)通信模块、蓝牙(bluetoothtm)通信模块等。
[0357]
空气调节设备可通过无线高保真(wi-fi)通信模块等来与语音识别服务器系统包括的服务器或外部的规定服务器、使用者的便携式终端等连接,并支持远程监控、远程控制等智能功能。
[0358]
使用者可通过便携式终端来确认关于空气调节设备的信息或对空气调节设备进行控制。
[0359]
另外,通信部1270可与接入点(access point:ap)装置进行通信,并通过接入点装置接入无线互联网络,并与其他设备进行通信。
[0360]
另外,控制部1240可通过通信部1270向语音识别服务器系统等传送空气调节设备状态信息、使用者的语音指令等。
[0361]
另一方面,若通过通信部1270接收到控制信号,则控制部1240可将空气调节设备控制为根据接收到的控制信号进行动作。
[0362]
驱动部1280可通过控制与室内风扇连接的马达的旋转,来控制向室内吐出的空气的量。例如,驱动部1280可控制与设置于前方送风模块31的循环风扇、循环风扇下端的其他送风扇等连接的马达的旋转。
[0363]
另外,驱动部1280可控制通过蒸发或冷凝从热交换器供给的制冷剂使周边的空气进行热交换的驱动。
[0364]
驱动部1280可与控制部1240的控制指令对应地控制设置于箱体组件ⅰ内部的阀、风向调节部件等的动作。
[0365]
根据实施例,控制部1240也可以直接控制空气调节设备内的规定单元。
[0366]
另外,驱动部1280可包括马达驱动部,并为了驱动马达而包括逆变器等。
[0367]
根据实施例,驱动部1280可提供驱动力使得前方送风模块31进行旋转动作。另外,驱动部1280可向循环器移动部(未图示)提供动力,以使前方送风模块31能够移动。另外,驱动部1280可控制设置于内部的阀的开闭。根据情况,驱动部1280可提供动力使得上部箱体11向左侧或右侧滑动。根据实施例,驱动部1280可包括循环器驱动部、前侧面板驱动部。
[0368]
过滤器清扫组件ⅶ设置于过滤器模块62a、62b、62c、62d,并能够清扫过滤器模块62a、62b、62c、62d的异物质。过滤器清扫组件ⅶ可包括过滤器清扫装置72。过滤器清扫装置72可沿过滤器模块62a、62b、62c、62d的表面移动的同时吸入过滤器模块62a、62b、62c、62d的异物质。另外,过滤器清扫装置72可对过滤器模块62a、62b、62c、62d进行清扫的同时利用灭菌灯对过滤器模块62a、62b、62c、62d进行杀菌。
[0369]
根据需要,过滤器清扫组件ⅶ可以是包括导轨711、上端距离传感器1215a、下端距离传感器1215b、过滤器清扫装置72以及清扫模块控制部1247的概念。或者,过滤器清扫组件ⅶ可以是包括导轨711、过滤器清扫装置72以及清扫模块控制部1247的概念。或者,过滤器清扫组件ⅶ可以是包括过滤器清扫单元和清扫模块控制部1247的概念。
[0370]
另一方面,本发明的空气调节设备以自动或手动的方式执行过滤或清扫,因此对过滤器管理提供便利性。
[0371]
加湿组件
ⅴ
接收水槽51的水并实施提供水分的加湿,之后向外部吐出加湿的空气。加湿组件
ⅴ
通过产生蒸汽来加湿空气,加湿的空气可与被调节的空气一起通过吐出口向室内吐出。
[0372]
加湿组件
ⅴ
可使用利用振动的振动式、加热式、将水喷射的喷射方式,除此之外也可以使用多种加湿方式。
[0373]
控制部1240可控制为对输入输出的数据进行处理,将数据存储于存储器1256,通过通信部1270来收发数据。
[0374]
控制部1240可通过显示器模块1000、操作部1230等将空气调节设备控制为根据输入进行动作,而将驱动部1280控制为通过与室外机收发数据使被从室外机供给的制冷剂调节的冷气向室内吐出。
[0375]
控制部1240可基于所设定的动作模式或从传感器部1215测量到的数据,控制为使前方送风模块31向外部吐出空气。
[0376]
另外,控制部1240可将加湿组件
ⅴ
控制为通过进行动作来吐出加湿的空气,而将过滤器清扫组件ⅶ控制为清扫过滤器。
[0377]
控制部1240可通过传感器部1215或视觉模块1900来检测室内人数,并基于检测到的室内人员的位置信息控制气流。
[0378]
控制部1240可监控各个模块的动作状态,并控制为根据施加的数据、通过显示器模块1000来输出动作状态。
[0379]
另一方面,本发明实施例的空气调节设备还可以包括电源部1299、用于接收使用者的语音指令的音频输入部1220、用于以音频输出规定信息的音频输出部1291等。
[0380]
电源部1299可向空气调节设备的各个单元供给动作电源。电源部1299可通过对连接到的使用电源进行整流和平滑来输出各个单元所需的电压并供给。另外,电源部1299可防止产生浪涌电流并产生恒电压。另外,电源部1299可向室外机(未图示)供给动作电源。
[0381]
音频输入部1220可接收外部的音频信号、使用者的语音指令。为此,音频输入部1220可设置有一个以上的麦克(mic)。另外,音频输入部1220可设置有多个麦克,以进一步准确地接收使用者的语音指令。多个麦克可在彼此不同的位置隔开配置,并且可获取外部的音频信号并处理成电信号。
[0382]
音频输入部1220可包括将模拟声音转换为数字数据的处理部或者可通过与处理部连接来进行数字化使得控制部1240或规定服务器能够识别使用者输入的语音指令。
[0383]
另一方面,音频输入部1220可使用多种噪音消除算法,以消除在接收使用者的语音指令的过程中产生的噪音(noise)。
[0384]
另外,音频输入部1220可包括用于从各个麦克接收到的音频信号中消除噪音的过滤器、对从过滤器输出的信号进行放大并输出的放大器等用于音频信号处理的构件。
[0385]
另外,音频输出部1291可根据控制部1240的控制以音频输出警告音、动作模式、动作状态、错误状态等的提醒消息、与使用者的输入指令对应的信息、与使用者的输入指令对应的处理结果等。
[0386]
另一方面,音频输出部1291可将来自控制部1240的电信号转换为音频信号并输出。为此,可具备音箱等。
[0387]
图33是示例本发明一实施例的控制部的内部结构的图。
up)语音信号的识别之后输入的使用者的语音指令。
[0404]
另外,处理器1260可通过通信部1270向语音识别服务器系统等传送空气调节设备的状态信息、使用者的语音指令等。
[0405]
另一方面,若通过通信部1270接收到控制信号,则处理器1260可向控制部1240传送控制信号,控制部1240可将空气调节设备控制为根据接收到的控制信号进行动作。
[0406]
最终,可通过语音识别模块1205来执行语音数据获取、与服务器系统的通信以及输出对应的声音。
[0407]
另一方面,语音识别模块1205可附着到除了空气调节设备之外的多种电子设备。或者也可以不附着于其他电子设备而作为单独的装置使用。
[0408]
本发明一实施例的空气调节设备可接收使用者的语音输入,语音识别服务器系统可通过识别并分析使用者的语音输入来控制空气调节设备。
[0409]
由此,使用者可在不操作便携式终端、远程控制装置的情况下控制空气调节设备。
[0410]
图35是本发明实施例的清扫模块的内部框图
[0411]
参照附图,过滤器清扫组件ⅶ可包括:过滤器清扫装置72,沿过滤器模块62a、62b、62c、62d移动,用于清扫过滤器;导轨711,用于引导过滤器清扫装置72的移动;以及传感器部1215,配置于导轨711,用于检测与移动的过滤器清扫装置72的距离。
[0412]
本发明的空气调节设备可包括配置于空气吸入口并对流向内部空间的空气进行过滤的过滤器模块62a、62b、62c、62d,过滤器清扫装置72可沿过滤器模块62a、62b、62c、62d移动。
[0413]
更详细地说,导轨711从过滤器模块62a、62b、62c、62d的上端中心向下端中心方向延伸形成,并能够引导过滤器清扫装置72的上下方向移动。
[0414]
过滤器清扫装置72可包括产生用于移动的驱动力的齿轮马达7251a、7251b和用于传递齿轮马达7251a、7251b的动力的移动齿轮725a、725b。移动齿轮725a、725b可具备沿周向排列的多个小齿轮齿以能够与导轨711啮合。
[0415]
导轨711可具备可与小齿轮齿啮合的多个齿条齿。
[0416]
控制部1240可在请求过滤器清扫功能时,通过控制齿轮马达7251a、7251b来产生动力。例如,齿轮马达7251a、7251b可以是步进电机,控制部1240可在请求过滤器清扫功能时,通过产生脉冲信号来控制齿轮马达7251a、7251b。在每输入360个脉冲旋转一周的步进电机的情况下,步进电机可在输入每一个脉冲时旋转一度左右。
[0417]
由齿轮马达7251a、7251b产生的动力传递到移动齿轮725a、725b,由此,移动齿轮725a、725b能够旋转。此时,移动齿轮725a、725b的小齿轮齿和导轨711的齿条齿能够啮合。另外,过滤器清扫装置72可根据移动齿轮725a、725b的旋转方向而向上移动或向下移动。
[0418]
另一方面,搅拌器723a、723b可通过直接或间接地与搅拌马达7233连接来与过滤器清扫装置72的上下方向移动进行联动,从而搅拌器723a、723b能够进行旋转。搅拌器723a、723b可与过滤器模块62a、62b、62c、62d接触并产生摩擦的同时进行旋转。另外,搅拌器723a、723b可进行旋转的同时使附着在过滤器模块62a、62b、62c、62d上的异物质脱离。
[0419]
传感器部1215可设置有基于红外线信号来检测与过滤器清扫装置72的距离的至少一个ir(infrared:红外线)传感器。ir传感器输出第一红外线信号,并基于在输出的第一红外线信号中从过滤器清扫装置72反射的第二红外线信号,检测与过滤器清扫装置72的距
离。
[0420]
由于本发明的传感器部1215具备ir传感器,从而能够容易实现过滤器清扫组件ⅶ并降低制造费用。
[0421]
传感器部1215可设置有上端距离传感器1215a和下端距离传感器1215b。
[0422]
上端距离传感器1215a位于导轨711的上端,在过滤器清扫装置72向上侧方向移动时,可检测与过滤器清扫装置72的距离。
[0423]
下端距离传感器1215b位于导轨711的下端,在过滤器清扫装置72向下侧方向移动时,可检测与过滤器清扫装置72的距离。
[0424]
更详细地说,过滤器清扫装置72可设置有用于容纳齿轮马达7251a、7251b和搅拌器723a、723b的罩体721、722。
[0425]
上端距离传感器1215a可配置于导轨711的最上端。或者,上端距离传感器1215a可配置于导轨711的与过滤器清扫装置72的上侧方向最大移动路径对应的位置。
[0426]
上端距离传感器1215a可在过滤器清扫装置72向上侧方向移动时检测与罩体721、722的上侧面的距离。
[0427]
下端距离传感器1215b可配置于导轨711的最下端。或者下端距离传感器1215b可配置于导轨711的与过滤器清扫装置72的下侧方向最大移动路径对应的位置。
[0428]
下端距离传感器1215b可在过滤器清扫装置72向下侧方向移动时检测与罩体721、722的下侧面的距离。
[0429]
本发明的传感器部1215配置于导轨711的最上端和最下端,由此将过滤器清扫组件ⅶ的布局限制性降低到最小,从而可增加设计自由度。
[0430]
图36是用于说明在过滤器清扫装置向导轨711的上侧方向移动时导轨711的移动速度的控制或在向导轨711的下侧方向移动时导轨711的移动速度的控制的图。
[0431]
参照附图,本发明的空气调节设备可包括在后侧面形成有空气吸入口的上部箱体11,过滤器模块62a、62b、62c、62d配置于空气吸入口并能够过滤流向内部空间的空气。
[0432]
导轨711从过滤器模块62a、62b、62c、62d的上端中心向下端中心方向延伸形成并能够引导过滤器清扫装置72的上下方向移动。
[0433]
过滤器清扫装置72可包括产生用于过滤器清扫装置72的移动的动力的齿轮马达7251a、7251b、可与过滤器模块62a、62b、62c、62d摩擦接触的同时进行旋转的搅拌器723a、723b以及用于容纳齿轮马达7251a、7251b和搅拌器723a、723b的罩体721、722。
[0434]
齿轮马达7251a、7251b可将动力传递到移动齿轮725a、725b,移动齿轮725a、725b可沿轴向具备多个小齿轮齿。
[0435]
上端距离传感器1215a可配置于导轨711的最上端。或者上端距离传感器1215a可配置于导轨711的与过滤器清扫装置72的上侧方向最大移动路径对应的位置。
[0436]
下端距离传感器1215b可配置于导轨711的最下端。或者,下端距离传感器1215b可配置于导轨711的与过滤器清扫装置72的下侧方向最大移动路径对应的位置。
[0437]
上端距离传感器1215a可在过滤器清扫装置72向上侧方向移动时检测与罩体721、722的上侧面的距离。下端距离传感器1215b可在过滤器清扫装置72向下侧方向移动时检测与罩体721、722的下侧面的距离。
[0438]
上端距离传感器1215a和下端距离传感器1215b可由限位开关方式或光电传感器
方式来实现。优选地,上端距离传感器1215a和下端距离传感器1215b由红外线方式实现。即,上端距离传感器1215a和下端距离传感器1215b分别设置有ir传感器。
[0439]
控制部1240可基于由传感器部1215检测到的距离信息,控制过滤器清扫装置72的移动速度。
[0440]
更详细地说,当过滤器清扫装置72达到预先设定的第一接近距离时,控制部1240可控制为降低过滤器清扫装置72的移动速度。
[0441]
当过滤器清扫装置72达到预先设定的第一接近距离时,控制部1240可以线性降低过滤器清扫装置72的移动速度。此时,移动速度的斜率可以是第一斜率。
[0442]
另一方面,第一接近距离可在考虑空气调节设备的结构、设计、音调(tonality)等级等情形下进行设定。例如,本发明的空气调节设备可通过实验对驱动过滤器清扫装置72时产生的噪音进行分析并将音调(tonality)等级最小的时的过滤器清扫装置72的接近距离设定为第一接近距离。
[0443]
此时,音调(tonality)可理解为定量地表达在音质指标(sound quality index:sq)中人类感到烦躁的音调。
[0444]
当过滤器清扫装置72达到小于第一接近距离的第二接近距离时,控制部1240可控制为使过滤器清扫装置72停止。
[0445]
第二接近距离可以是当过滤器清扫装置72与上端距离传感器1215a或下端距离传感器1215b相接时上端距离传感器1215a或下端距离传感器1215b检测到的与过滤器清扫装置72的距离信息。
[0446]
或者,第二接近距离可以是过滤器清扫装置72达到能够沿导轨711移动的最大位置时,上端距离传感器1215a或下端距离传感器1215b检测到的与过滤器清扫装置72的距离信息。
[0447]
另一方面,上述过程可在过滤器清扫装置72向上侧方向移动和向下侧方向移动时均执行。即,在过滤器清扫装置72向上侧方向移动时,控制部1240可基于由上端距离传感器1215a检测到的距离信息来控制过滤器清扫装置72的移动速度。
[0448]
另外,当过滤器清扫装置72向下侧方向移动时,控制部1240可基于由下端距离传感器1215b检测到的距离信息,控制过滤器清扫装置72的移动速度。
[0449]
当过滤器清扫装置72达到第二接近距离时,控制部1240可变更齿轮马达7251a、7251b的旋转方向。例如,在过滤器清扫装置72向上侧方向移动的中途,若过滤器清扫装置72达到第二接近距离,则控制部1240可通过变更齿轮马达7251a、7251b的旋转方向使过滤器清扫装置72向下侧方向移动。
[0450]
作为其他例子,在过滤器清扫装置72向下侧方向移动的中途,若过滤器清扫装置72达到第二接近距离,则控制部1240可通过变更齿轮马达7251a、7251b的旋转方向使过滤器清扫装置72向上侧方向移动。
[0451]
此时,控制部1240可在过滤器清扫装置72达到预先设定的脱离距离为止使过滤器清扫装置72的移动速度线性增加。另外,移动速度的斜率可以是第二斜率slope2。
[0452]
脱离距离可在考虑空气调节设备的结构、设计、音调(tonality)等的情况下进行设定。
[0453]
另一方面,第二斜率slope2的绝对值的大小可大于第一斜率slope1的绝对值的大
小。即,当过滤器清扫装置72达到第二接近距离时,控制部1240可控制为通过变更齿轮马达7251a、7251b的旋转方向使过滤器清扫装置72迅速地达到反向最大速度。由此,空气调节设备可减少过滤器清扫所消耗的时间。
[0454]
如上所述,在图36中,当过滤器清扫装置72达到预先设定的第一接近距离时t1,控制部1240可控制为以线性降低过滤器清扫装置72的移动速度并在第二接近距离t2使过滤器清扫装置72停止。此时,移动速度的斜率可以是第一斜率slope1。
[0455]
另外,当过滤器清扫装置72达到第二接近距离时t2,控制部1240可在达到预先设定的脱离距离为止线性增加所述过滤器清扫单元的所述移动速度。此时,移动速度的斜率可以是第二斜率。
[0456]
另外,过滤器清扫装置72可从导轨711的下侧开始在过滤器清扫装置72的移动路径上至少往复一次。过滤器清扫装置72的往复次数可与附着在过滤器模块62a、62b、62c、62d上的异物质的量对应地自动设定。另外,过滤器清扫装置72的往复次数也可以通过使用者的过滤器清扫指令来手动设定。
[0457]
图37是示出本发明实施例的空气调节设备的动作方法的流程图。
[0458]
参照附图,首先空气调节设备可通过检测附着在过滤器模块62a、62b、62c、62d上的异物质的量来自动地或根据使用者指令手动地执行过滤器清扫功能。
[0459]
控制部1240可控制为使过滤器清扫装置72的初始位置位于移动引导件的下侧末端。为此,控制部1240可控制齿轮马达7251a、7251b的旋转方向和速度。
[0460]
控制部1240可将过滤器清扫装置72控制为向上侧方向移动(s1601)。在过滤器清扫装置72向上侧方向移动的中途,可通过与齿轮马达7251a、7251b联动或通过额外的搅拌马达(未图示)来驱动搅拌器723a、723b。
[0461]
搅拌器723a、723b可在旋转移动的同时使附着在过滤器模块62a、62b、62c、62d上的异物质脱离。从过滤器模块62a、62b、62c、62d脱离的异物质可被捕集到罩体721、722内部的异物质捕集空间和/或另设置的异物质收纳桶。
[0462]
上端距离传感器1215a可配置于导轨711的最上端。或者,上端距离传感器1215a可配置于与过滤器清扫装置72向上侧方向最大移动路径对应的位置。
[0463]
上端距离传感器1215a可检测与罩体721、722的上侧面的距离(s1603)。
[0464]
控制部1240可运算过滤器清扫装置72的接近距离(s1605)。当过滤器清扫装置72未达到第一接近距离时,控制部1240可控制为保持过滤器清扫装置72的移动速度的情况下使过滤器清扫装置72向上侧方向移动。
[0465]
当过滤器清扫装置72达到预先设定的第一接近距离时,控制部1240可控制为过降低滤器清扫装置72的移动速度(s1607)。具体而言,控制部1240可线性降低过滤器清扫装置72的移动速度。此时,移动速度的斜率可以是第一斜率。
[0466]
控制部1240可运算过滤器清扫装置72是否达到第二接近距离(s1609)。当过滤器清扫装置72未达到第二接近距离时,控制部1240可线性降低过滤器清扫装置72的移动速度以使其具有第一斜率。
[0467]
当过滤器清扫装置72达到第二接近距离时,控制部1240可控制为使过滤器清扫单元停止(s1611)。此时,第二接近距离可以是当过滤器清扫装置72与上端距离传感器1215a相接时上端距离传感器1215a检测到的与过滤器清扫装置72的距离信息。
[0468]
或者,第二接近距离可以是当过滤器清扫装置72达到能够沿导轨711向上侧移动的最大位置时的上端距离传感器1215a检测到的与清扫单元710的距离信息。
[0469]
控制部1240可通过在过滤器清扫装置72能够移动的上侧最大移动位置变更齿轮马达7251a、7251b的旋转方向,使过滤器清扫装置72向下侧方向移动(s1613)。
[0470]
此时,控制部1240可在过滤器清扫装置72达到预先设定的脱离距离为止线性增加过滤器清扫装置72的移动速度。另外,移动速度的斜率可以是第二斜率。
[0471]
在该情况下,附着在过滤器模块62a、62b、62c、62d上的异物质也可以被搅拌器723a、723b分离,并被捕集到罩体721、722内部的异物质捕集空间和/或另设置的异物质收纳桶。
[0472]
另一方面,为了迅速地清扫过滤器,优选地,预先设定的脱离距离小于第一接近距离。
[0473]
下端距离传感器1215b可配置于导轨711的最下端。或者,下端距离传感器1215b可配置于与过滤器清扫装置72的下侧方向最大移动路径对应的位置。
[0474]
下端距离传感器1215b可检测与罩体721、722的下侧面的距离(s1615)。
[0475]
控制部1240可运算过滤器清扫装置72的接近距离(s1617)。当过滤器清扫装置72未达到第一接近距离时,控制部1240可控制为保持达到所述脱离距离时的移动速度的情况下使过滤器清扫装置72向下侧方向移动。
[0476]
当过滤器清扫装置72达到预先设定的第一接近距离时,控制部1240可控制为降低过滤器清扫装置72的移动速度(s1619)。具体而言,控制部1240可线性降低过滤器清扫装置72的移动速度。此时,移动速度的斜率可以是第一斜率。
[0477]
控制部1240可运算过滤器清扫装置72是否达到第二接近距离(s1621)。当过滤器清扫装置72未达到第二接近距离时,控制部1240可线性降低过滤器清扫装置72的移动速度以使其具有第一斜率。
[0478]
当过滤器清扫装置72达到第二接近距离时,控制部1240可控制为使过滤器清扫单元停止(s1623)。此时,第二接近距离可以是当过滤器清扫装置72与下端距离传感器1215b相接时下端距离传感器1215b检测到的与过滤器清扫装置72的距离信息。
[0479]
或者,第二接近距离可以是当过滤器清扫装置72达到能够沿导轨711向下侧移动的最大位置时的下端距离传感器1215b检测到的与清扫单元710的距离信息。
[0480]
图37的过程可以以导轨711的下侧为基准进行至少一次以上。
[0481]
如上所述,本发明的空气调节设备控制为在预先设定的距离内使过滤器清扫装置72的移动速度降低,因此可降低在过滤器清扫装置72动作时产生的噪音。
[0482]
另外,空气调节设备可通过控制过滤器清扫装置72的速度,降低因过滤器清扫装置72和导轨711之间的摩擦和/或过滤器清扫装置72的过度移动(overswing)引起的噪音并防止发生故障。
[0483]
另外,本发明的空气调节设备可通过降低过滤器清扫装置72动作时产生的噪音来使使用者的不适感降低到最小。
[0484]
图38是示出本发明实施例的空气调节设备的动作方法的流程图。
[0485]
参照附图,空气调节设备可通过检测附着在过滤器模块62a、62b、62c、62d上的异物质的量来自动地或者根据使用者指令手动地接收过滤器清扫结束信号(s1701)。
[0486]
在过滤器清扫装置72的上侧方向移动中接收到过滤器清扫结束信号时,控制部1240可控制为使过滤器清扫装置72向下侧方向移动。
[0487]
或者,在过滤器清扫装置72的上侧方向移动中接收到过滤器清扫结束信号时,控制部1240可控制为使过滤器清扫装置72向上侧方向移动至第二接近距离之后使过滤器清扫装置72向下侧方向移动(s1703)。
[0488]
下端距离传感器1215b可检测与罩体721、722的下侧面的距离(s1705)。
[0489]
控制部1240可运算过滤器清扫装置72的接近距离(s1707)。当过滤器清扫装置72未达到第一接近距离时,控制部1240可控制为保持移动速度的情况下使过滤器清扫装置72向下侧方向移动。
[0490]
当过滤器清扫装置72达到预先设定的第一接近距离时,控制部1240可控制为降低过滤器清扫装置72的移动速度(s1709)。
[0491]
具体而言,控制部1240可线性降低过滤器清扫装置72的移动速度。此时,移动速度的斜率可以是第一斜率。
[0492]
控制部1240可运算过滤器清扫装置72是否达到第二接近距离(s1711)。当过滤器清扫装置72未达到第二接近距离时,控制部1240可线性降低过滤器清扫装置72的移动速度以使其具有第一斜率。
[0493]
当过滤器清扫装置72达到第二接近距离时,控制部1240可控制为使过滤器清扫单元停止(s1713)。
[0494]
即,当过滤器清扫功能结束时,控制部1240可将过滤器清扫装置72控制为向导轨711的下侧方向移动,并可通过线性降低过滤器清扫装置72的移动速度,将其安放在导轨711的下侧末端。
[0495]
附图是为了便于理解本说明书公开的实施例而提供的,本说明书公开的技术思想并不局限于附图,本发明包括本发明的技术思想和技术范围内作出的所有变更、等同物及替代物。
[0496]
同样地,在附图中虽然以特定的顺序说明了动作,但是这不应该被理解为为了得到优选的结果而以所示的特定顺序或按顺序执行这些操作或者执行所有示出的操作。在特定情况下,多任务处理和并行处理是有利的。
[0497]
以上参照附图对本发明的优选实施例进行了说明,但是本发明并不限定于以上所述的特定的实施例,在不背离权利要求书中主张的本发明的技术思想的范围内,本领域的一般技术人员能够对其进行多种变形实施,这样的变形实施不应脱离本发明的技术思想或前景而单独地加以理解。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。