1.本发明涉及一种泥浆铺填装置,尤其涉及一种建筑施工用泥浆铺填装置。
背景技术:
2.工人在对建筑物进行施工时,当需要用泥浆对楼顶或者地面进行铺填时,都会使用到搅拌机,首先通过人工将泥浆倒入搅拌机内,在开启搅拌机后,通过推动搅拌机移动,使泥浆掉落在楼顶上,从而用泥浆对楼顶进行铺填,由于这种方式在将泥浆进行铺填时,泥浆中含有一些未搅均匀的泥浆块,容易导致搅拌机内的出料口造成堵塞,而且搅拌机在将泥浆铺在楼顶上后,还需要额外的人工将堆积的泥浆进行铺平,比较耗费人力和时间。
3.因此,设计了一种能够将泥浆搅拌均匀而且能够自动铺平的建筑施工用泥浆铺填装置。
技术实现要素:
4.为了克服人们在使用搅拌机对楼顶用泥浆进行铺填时,泥浆块容易将拌机内的出料口堵塞,而且还需要人工将堆积的泥浆进行铺平的缺点,本发明提供一种能够将泥浆搅拌均匀而且能够自动铺平的建筑施工用泥浆铺填装置。
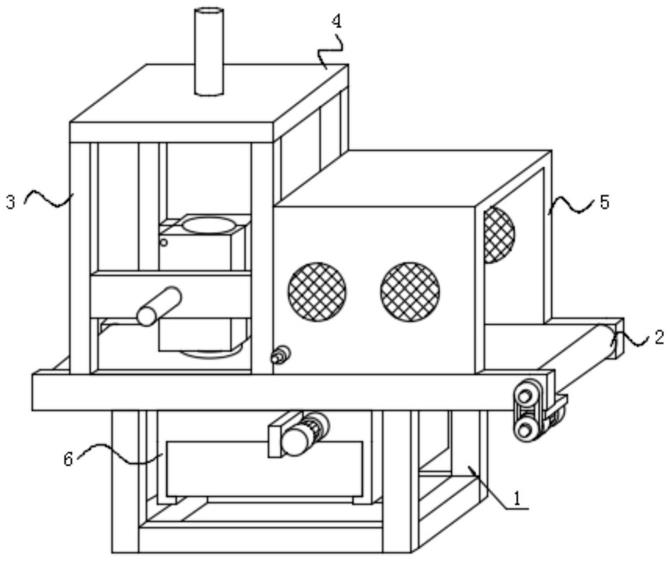
5.本发明通过以下技术途径实现:一种建筑施工用泥浆铺填装置,包括有第一支撑板、第一支撑柱、第一转轴、车轮、控制箱、支撑架、第二转轴、铁质活动板、第一扭簧、光电传感器、电磁铁、搅拌机构、阻隔机构和卸料机构,第一支撑板底部前后两侧均左右对称设有第一支撑柱,第一支撑柱下部均转动式设有第一转轴,第一转轴前后两侧均设有车轮,第一支撑板顶部右侧前部设有控制箱,第一支撑板顶部设有支撑架,支撑架上部前后两侧均转动式设有第二转轴,第二转轴上均设有铁质活动板,铁质活动板左右两侧与支撑架之间均设有第一扭簧,前侧的铁质活动板内部后侧中部设有光电传感器,后侧的铁质活动板前侧中部设有电磁铁,支撑架上设有用于对泥浆进行搅拌的搅拌机构,搅拌机构上设有用于挡住泥浆出料的阻隔机构,第一支撑板顶部右侧设有用于泥浆出料的卸料机构。
6.作为更进一步的优选方案,搅拌机构包括有储存罐、第一减速电机、第三转轴、传动组件、第一搅拌杆和第一压力传感器,支撑架内侧下部设有储存罐,第一支撑板顶部左侧中部设有第一减速电机,储存罐中部转动式设有第三转轴,第三转轴左侧与第一减速电机的输出轴之间设有传动组件,第三转轴上设有第一搅拌杆,第一搅拌杆位于储存罐的内部,储存罐内底部左侧设有第一压力传感器。
7.作为更进一步的优选方案,阻隔机构包括有第四转轴、第一活动板、第二扭簧和第二支撑柱,储存罐前后两侧的中部均转动式设有第四转轴,第四转轴上均设有第一活动板,第一活动板均挡住储存罐的底部,第一活动板左右两侧与储存罐之间均设有第二扭簧,第一活动板底部均设有第二支撑柱。
8.作为更进一步的优选方案,卸料机构包括有第三支撑柱、活动杆、弹簧、第四支撑
柱、电动推杆、第一活动块和触摸开关,第一支撑板顶部右侧设有第三支撑柱,第三支撑柱上部前后两侧均滑动式设有活动杆,活动杆左侧均在同侧的第二支撑柱上滚动,活动杆外侧与第三支撑柱之间均设有弹簧,第一支撑板顶部右侧中部设有多个第四支撑柱,第四支撑柱的数量至少为二,第四支撑柱上部之间设有电动推杆,电动推杆的伸缩杆上设有第一活动块,第一活动块与活动杆接触,第一支撑板顶部左侧中部设有触摸开关。
9.作为更进一步的优选方案,还包括有用于将泥浆进行铺平的铺平机构,铺平机构包括有第一支撑块、第五转轴、第二活动板和第三扭簧,第一支撑板右侧的前后两侧均设有第一支撑块,第一支撑块内侧之间转动式设有第五转轴,第五转轴上设有第二活动板,第二活动板前后两侧与同侧的第一支撑块之间均设有第三扭簧。
10.作为更进一步的优选方案,还包括有用于将泥浆搅拌均匀的拌匀机构,拌匀机构包括有第二支撑板、第二减速电机、第二搅拌杆和第二压力传感器,支撑架内侧上部设有第二支撑板,第二支撑板中部设有第二减速电机,第二减速电机的输出轴上设有第二搅拌杆,支撑架内侧上部中间设有第二压力传感器,第二压力传感器位于第二支撑板的下侧。
11.作为更进一步的优选方案,还包括有用于控制泥浆进行下料的下料机构,下料机构包括有第二支撑块、第六转轴、第二活动块、第一锥齿轮、第七转轴、第二锥齿轮和缺齿锥齿轮,支撑架内侧上部设有第二支撑块,第二支撑块位于第二支撑板与第二压力传感器之间,第二支撑块底部中间转动式设有第六转轴,第六转轴底部设有第二活动块,第二活动块挡住支撑架的内侧上部,第六转轴上侧设有第一锥齿轮,第二支撑块内部前侧转动式设有第七转轴,第七转轴后侧设有第二锥齿轮,第二锥齿轮与第一锥齿轮啮合,第二减速电机的输出轴上设有缺齿锥齿轮,缺齿锥齿轮位于第二搅拌杆的下侧,缺齿锥齿轮位于第二支撑块的内部,缺齿锥齿轮在转动时会与第二锥齿轮接触。
12.作为更进一步的优选方案,控制箱内包括有蓄电池、控制模块和电源模块,蓄电池为整个建筑施工用泥浆铺填装置供电,电源模块上通过线路连接有电源总开关,控制模块和电源模块通过电性连接,控制模块上连接有ds1302时钟电路和24c02电路,光电传感器、第一压力传感器、第二压力传感器和触摸开关均与控制模块通过电性连接,第一减速电机、电磁铁、电动推杆和第二减速电机均与控制模块通过外围电路连接。
13.与现有技术相比,本发明其显著进步在于:1、本发明用手按住光电传感器,再将铁质活动板转动打开,然后将泥浆倒入支撑架内,在第一搅拌杆转动时,能够使第一搅拌杆自动对储存罐内的泥浆进行搅拌。
14.2、本发明按动一次触摸开关,能够带动第一活动块向左移动,使第一活动块挤压活动杆向外侧移动,从而使储存罐内的泥浆掉落至楼顶上,通过推动支撑架移动,从而方便人们用泥浆对楼顶进行铺填。
15.3、本发明在第二活动板的作用下,能够自动对楼顶上的泥浆进行铺平,减少人们的人力消耗。
16.4、本发明在将泥浆倒入支撑架内时,在第二搅拌杆的作用下,能够将支撑架内的泥浆搅拌均匀,防止泥浆块造成出料口堵塞。
附图说明
17.图1为本发明的立体结构示意图。
18.图2为本发明的a处放大立体结构示意图。
19.图3为本发明的剖视立体结构示意图。
20.图4为本发明的搅拌机构第一部分立体结构示意图。
21.图5为本发明的搅拌机构第二部分立体结构示意图。
22.图6为本发明的搅拌机构剖视立体结构示意图。
23.图7为本发明的阻隔机构立体结构示意图。
24.图8为本发明的b处放大立体结构示意图。
25.图9为本发明的卸料机构立体结构示意图。
26.图10为本发明的铺平机构立体结构示意图。
27.图11为本发明的c处放大立体结构示意图。
28.图12为本发明的拌匀机构立体结构示意图。
29.图13为本发明的拌匀机构剖视立体结构示意图。
30.图14为本发明的下料机构立体结构示意图。
31.图15为本发明的下料机构剖视立体结构示意图。
32.图16为本发明的d处放大立体结构示意图。
33.图17为本发明的电路框图。
34.图18为本发明的电路原理图。
35.图中标号名称:1-第一支撑板,2-第一支撑柱,3-第一转轴,4-车轮,5-控制箱,6-支撑架,7-第二转轴,8-铁质活动板,9-第一扭簧,10-光电传感器,11-电磁铁,12-搅拌机构,121-储存罐,122-第一减速电机,123-第三转轴,124-传动组件,125-第一搅拌杆,126-第一压力传感器,13-阻隔机构,131-第四转轴,132-第一活动板,133-第二扭簧,134-第二支撑柱,14-卸料机构,141-第三支撑柱,142-活动杆,143-弹簧,144-第四支撑柱,145-电动推杆,146-第一活动块,147-触摸开关,15-铺平机构,151-第一支撑块,152-第五转轴,153-第二活动板,154-第三扭簧,16-拌匀机构,161-第二支撑板,162-第二减速电机,163-第二搅拌杆,164-第二压力传感器,17-下料机构,171-第二支撑块,172-第六转轴,173-第二活动块,174-第一锥齿轮,175-第七转轴,176-第二锥齿轮,177-缺齿锥齿轮。
具体实施方式
36.以下结合说明书附图进一步阐述本发明、并结合说明书附图给出本发明的实施例。
37.实施例1一种建筑施工用泥浆铺填装置,如图1-图9所示,包括有第一支撑板1、第一支撑柱2、第一转轴3、车轮4、控制箱5、支撑架6、第二转轴7、铁质活动板8、第一扭簧9、光电传感器10、电磁铁11、搅拌机构12、阻隔机构13和卸料机构14,第一支撑板1底部前后两侧均左右对称设有第一支撑柱2,第一支撑柱2下部均转动式设有第一转轴3,第一转轴3前后两侧均设有车轮4,在车轮4的作用下,能够方便人们推动该建筑施工用泥浆铺填装置移动,第一支撑板1顶部右侧前部设有控制箱5,第一支撑板1顶部焊接有支撑架6,支撑架6上部前后两侧均转动式设有第二转轴7,第二转轴7上均设有铁质活动板8,铁质活动板8左右两侧与支撑架6之间均设有第一扭簧9,前侧的铁质活动板8内部后侧中部设有光电传感器10,后侧的铁质
活动板8前侧中部设有电磁铁11,支撑架6上设有搅拌机构12,搅拌机构12上设有阻隔机构13,第一支撑板1顶部右侧设有卸料机构14。
38.搅拌机构12包括有储存罐121、第一减速电机122、第三转轴123、传动组件124、第一搅拌杆125和第一压力传感器126,支撑架6内侧下部设有储存罐121,第一支撑板1顶部左侧中部栓接有第一减速电机122,储存罐121中部转动式设有第三转轴123,第三转轴123左侧与第一减速电机122的输出轴之间设有传动组件124,传动组件124由两个皮带轮和一根皮带组成,第三转轴123左侧与第一减速电机122的输出轴上均设有一个皮带轮,皮带轮之间套有皮带,第三转轴123上设有第一搅拌杆125,第一搅拌杆125在转动时,能够对储存罐121内的泥浆进行搅拌,第一搅拌杆125位于储存罐121的内部,储存罐121内底部左侧设有第一压力传感器126。
39.阻隔机构13包括有第四转轴131、第一活动板132、第二扭簧133和第二支撑柱134,储存罐121前后两侧的中部均转动式设有第四转轴131,第四转轴131上均设有第一活动板132,第一活动板132能够挡住储存罐121内的泥浆向下掉落,第一活动板132均挡住储存罐121的底部,第一活动板132左右两侧与储存罐121之间均设有第二扭簧133,第一活动板132底部均焊接有第二支撑柱134。
40.卸料机构14包括有第三支撑柱141、活动杆142、弹簧143、第四支撑柱144、电动推杆145、第一活动块146和触摸开关147,第一支撑板1顶部右侧焊接有第三支撑柱141,第三支撑柱141上部前后两侧均滑动式设有活动杆142,活动杆142左侧均在同侧的第二支撑柱134上滚动,活动杆142外侧与第三支撑柱141之间均设有弹簧143,第一支撑板1顶部右侧中部设有两个第四支撑柱144,第四支撑柱144上部之间设有电动推杆145,电动推杆145的伸缩杆上设有第一活动块146,第一活动块146与活动杆142接触,第一支撑板1顶部左侧中部设有触摸开关147。
41.当人们需要使用该建筑施工用泥浆铺填装置时,首先按动电源总开关,使该建筑施工用泥浆铺填装置通电,光电传感器10和第一压力传感器126开始工作,同时控制模块控制电磁铁11通电,电磁铁11通电后会吸住后侧的铁质活动板8,然后用手按住光电传感器10,当光电传感器10感应不到亮光时,光电传感器10发出信号,控制模块接收到信号后控制电磁铁11断电,电磁铁11断电后不吸附后侧的铁质活动板8,再将铁质活动板8转动打开,第一扭簧9发生形变,然后将泥浆倒入支撑架6内,使泥浆掉落至储存罐121内,再松开铁质活动板8,第一扭簧9恢复原状,第一扭簧9带动铁质活动板8反转关闭,同时当光电传感器10感应到亮光时,光电传感器10发出信号,控制模块接收到信号后控制电磁铁11通电,从而再次吸住后侧的铁质活动板8,使两个铁质活动板8固定在一起,防止两个铁质活动板8被支撑架6内的泥浆挤压自动打开。当泥浆与第一压力传感器126接触时,泥浆会对第一压力传感器126进行挤压,当第一压力传感器126感应到压力大于预设值时,第一压力传感器126发出信号,控制模块接收到信号后控制第一减速电机122开始工作,使第一减速电机122的输出轴通过传动组件124带动第三转轴123转动,从而带动第一搅拌杆125转动,使第一搅拌杆125对储存罐121内的泥浆进行搅拌,当人们需要用泥浆对楼顶进行铺填时,按动一次触摸开关147,触摸开关147发出信号,控制模块接收到信号后控制电动推杆145工作3秒,使电动推杆145的伸缩杆伸长,从而带动第一活动块146向左移动,使第一活动块146挤压活动杆142向外侧移动,弹簧143压缩,从而带动第二支撑柱134和第一活动板132转动,第二扭簧133发生
形变,使第一活动板132不再挡住储存罐121的底部,从而使储存罐121内的泥浆通过第一支撑板1掉落至楼顶上,3秒后,控制模块控制电动推杆145停止工作,然后推动支撑架6移动,在车轮4的作用下,从而带动该建筑施工用泥浆铺填装置发生移动,进而将泥浆铺填在楼顶上,当储存罐121内的泥浆全部铺完后,停止推动支撑架6,此时第一压力传感器126会感应到压力小于预设值,第一压力传感器126发出信号,控制模块接收到信号后控制第一减速电机122停止工作,使第三转轴123和第一搅拌杆125停止转动,同时控制模块控制电动推杆145工作3秒,使电动推杆145的伸缩杆缩短,从而带动第一活动块146向右移动复位,当第一活动块146与活动杆142分离时,弹簧143恢复原状,弹簧143带动活动杆142向内侧移动复位,使活动杆142与第一活动块146接触,从而带动第二支撑柱134和第一活动板132反转复位,第二扭簧133恢复原状,使第一活动板132重新挡住储存罐121的底部,3秒后,控制模块控制电动推杆145停止工作,然后重复上述操作,即可用泥浆将楼顶全部铺满,当人们不再需要使用该建筑施工用泥浆铺填装置时,再次按动电源总开关,使该建筑施工用泥浆铺填装置断电,光电传感器10和第一压力传感器126停止工作,同时电磁铁11断电。
42.实施例2在实施例1的基础之上,如图1、图3、图10、图11、图12、图13、图14、图15和图16所示,还包括有铺平机构15,铺平机构15包括有第一支撑块151、第五转轴152、第二活动板153和第三扭簧154,第一支撑板1右侧的前后两侧均焊接有第一支撑块151,第一支撑块151内侧之间转动式设有第五转轴152,第五转轴152上设有第二活动板153,第二活动板153在与泥浆接触时,能够将泥浆进行铺平,第二活动板153前后两侧与同侧的第一支撑块151之间均设有第三扭簧154。
43.当人们将泥浆铺填在楼顶上时,第二活动板153会与楼顶上的泥浆进行接触,此时楼顶上的泥浆会挤压第二活动板153发生转动,第三扭簧154发生形变,在第三扭簧154弹力的作用下,使第二活动板153对楼顶上的泥浆进行铺平,当第二活动板153与泥浆分离时,第三扭簧154恢复原状,第三扭簧154带动第二活动板153反转复位。
44.还包括有拌匀机构16,拌匀机构16包括有第二支撑板161、第二减速电机162、第二搅拌杆163和第二压力传感器164,支撑架6内侧上部设有第二支撑板161,第二支撑板161中部栓接有第二减速电机162,第二减速电机162的输出轴上设有第二搅拌杆163,第二搅拌杆163在转动时,能够将支撑架6内的泥浆搅拌均匀,支撑架6内侧上部中间设有第二压力传感器164,第二压力传感器164位于第二支撑板161的下侧。
45.还包括有下料机构17,下料机构17包括有第二支撑块171、第六转轴172、第二活动块173、第一锥齿轮174、第七转轴175、第二锥齿轮176和缺齿锥齿轮177,支撑架6内侧上部焊接有第二支撑块171,第二支撑块171位于第二支撑板161与第二压力传感器164之间,第二支撑块171底部中间转动式设有第六转轴172,第六转轴172底部设有第二活动块173,第二活动块173在转动时,能够控制泥浆进行向下掉落,第二活动块173挡住支撑架6的内侧上部,第六转轴172上侧设有第一锥齿轮174,第二支撑块171内部前侧转动式设有第七转轴175,第七转轴175后侧设有第二锥齿轮176,第二锥齿轮176与第一锥齿轮174啮合,第二减速电机162的输出轴上设有缺齿锥齿轮177,缺齿锥齿轮177位于第二搅拌杆163的下侧,缺齿锥齿轮177位于第二支撑块171的内部,缺齿锥齿轮177在转动时会与第二锥齿轮176接触。
46.当该建筑施工用泥浆铺填装置通电时,第二压力传感器164开始工作,当人们将泥浆倒入支撑架6内时,泥浆会与第二压力传感器164接触,当第二压力传感器164感应到压力大于最大预设值时,第二压力传感器164发出信号,控制模块接受到信号后控制第二减速电机162开始工作,使第二减速电机162的输出轴带动第二搅拌杆163和缺齿锥齿轮177转动,从而使第二搅拌杆163将泥浆搅拌均匀,当缺齿锥齿轮177与第二锥齿轮176接触时,缺齿锥齿轮177带动第二锥齿轮176转动,从而带动第一锥齿轮174、第六转轴172和第二活动块173转动,当第二活动块173不再挡住支撑架6的内侧上部时,搅拌均匀的泥浆会向下掉落至储存罐121内,当缺齿锥齿轮177与第二锥齿轮176分离时,第二锥齿轮176、第一锥齿轮174、第六转轴172和第二活动块173停止转动,当第二活动块173重新挡住支撑架6的内侧上部时,搅拌均匀的泥浆停止向下掉落至储存罐121内,如此往复,即可将泥浆搅拌均匀后掉落至储存罐121内,当支撑架6内的泥浆全部掉落至储存罐121内后,此时第二压力传感器164会感应到压力小于最小预设值时,第二压力传感器164发出信号,控制模块接受到信号后控制第二减速电机162停止工作,使第二搅拌杆163和缺齿锥齿轮177停止转动,当该建筑施工用泥浆铺填装置断电时,第二压力传感器164停止工作。
47.如图17和图18所示,控制箱5内包括有蓄电池、控制模块和电源模块,蓄电池为整个建筑施工用泥浆铺填装置供电,电源模块上通过线路连接有电源总开关,控制模块和电源模块通过电性连接,控制模块上连接有ds1302时钟电路和24c02电路,光电传感器10、第一压力传感器126、第二压力传感器164和触摸开关147均与控制模块通过电性连接,第一减速电机122、电磁铁11、电动推杆145和第二减速电机162均与控制模块通过外围电路连接。
48.最后,有必要说明的是:上述内容仅用于帮助理解本发明的技术方案,不能理解为对本发明保护范围的限制;本领域技术人员根据本发明的上述内容所做出的非本质改进和调整,均属本发明所要求保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。