1.本实用新型涉及键盘生产技术领域,尤其涉及一种键盘组装装置。
背景技术:
2.按键是键盘的主要组成部分,目前最常见的按键从上往下一般包括键帽、剪刀脚和主板。其中,剪刀脚是一种常用的键盘零件,主要包括相互交叉且呈旋转枢接的内框架和外框架,其作用是使得键帽具有一定的弹性。
3.进行组装时,通常先将剪刀脚放入主板的键位槽中,然后将键帽放置在剪刀脚上,最后往下压紧键帽,使剪刀脚的上端与键帽扣合、下端与主板扣合,即可完成剪刀脚按键的组装。
4.目前,行业内最常用的按键组装方法是人工进行组装,自动化程度不高、工作效率低、耗时耗力,不适合现代机械化生产。
5.本背景部分中公开的以上信息仅被包括用于增强本公开内容的背景的理解,且因此可包含不形成对于本领域普通技术人员而言在当前已经知晓的现有技术的信息。
技术实现要素:
6.本实用新型的一个目的在于,提供一种键盘组装装置,能实现剪刀脚按键的机械化组装,进而降低人力成本、提高生产效率。
7.为达以上目的,本实用新型提供一种键盘组装装置,包括主传送带和沿所述主传送带的送料方向依次设置的进料升降平台、若干剪刀脚转移设备、自动压合机以及出料升降平台;
8.其中,所述主传送带用于将装载有主板的载具从所述进料升降平台输送至所述出料升降平台;
9.所述剪刀脚转移设备用于将剪刀脚放入所述载具内的主板的键位槽中;
10.所述自动压合机用于将键帽放置于剪刀脚的上方,并往下压合。
11.可选的,还包括用于用于将空载的载具从所述出料升降平台输送至所述进料升降平台的副传送带。
12.可选的,所述副传送带平行于所述主传送带,且位于所述主传送带的下方。
13.可选的,所述进料升降平台包括进料传送带和用于驱使所述进料传送带上下运动的进料升降组件;
14.当所述进料升降组件驱使所述进料传送带往上运动至极限位置时,所述进料传送带与所述主传送带平齐;
15.当所述进料升降组件驱使所述进料传送带往下运动至极限位置时,所述进料传送带与所述副传送带平齐。
16.可选的,所述出料升降平台包括出料传送带和用于驱使所述出料传送带上下运动的出料升降组件;
17.当所述出料升降组件驱使所述出料传送带往上运动至极限位置时,所述出料传送带与所述主传送带平齐;
18.当所述出料升降组件驱使所述出料传送带往下运动至极限位置时,所述出料传送带与所述副传送带平齐。
19.可选的,所述剪刀脚转移设备包括用于存放剪刀脚的第一振动盘、中转定位治具、用于将剪刀脚从所述第一振动盘转移至所述中转定位治具的第一驱动机构以及用于将剪刀脚从所述中转定位治具转移至所述主板中的第二驱动机构。
20.可选的,所述剪刀脚转移设备还包括用于对剪刀脚进行视觉定位的工业摄像头。
21.可选的,所述自动压合机包括用于存放键帽的第二振动盘、用于抓取键帽的夹爪以及用于驱动所述夹爪将所述键帽放置于所述剪刀脚上并往下压合的第三驱动机构。
22.本实用新型的有益效果在于:提供一种键盘组装装置,使用主传送带实现进料升降平台、若干剪刀脚转移设备、自动压合机以及出料升降平台之间的物料传输,进而达到机械化组装、自动化生产的效果,极大地降低了对人力的依赖,从而提高了生产效率。
附图说明
23.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其它的附图。
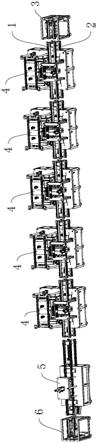
24.图1为实施例提供的键盘组装装置的整体示意图;
25.图2为实施例提供的键盘组装装置的正面示意图;
26.图3为实施例提供的进料升降平台的结构示意图;
27.图4为实施例提供的出料升降平台的结构示意图;
28.图5为实施例提供的剪刀脚转移设备的俯视示意图。
29.图中:
30.1、主传送带;
31.2、副传送带;
32.3、进料升降平台;301、进料传送带;302、进料升降组件;
33.4、剪刀脚转移设备;401、第一振动盘;402、中转定位治具;403、第一驱动机构;404、第二驱动机构;405、工业摄像头;
34.5、自动压合机;501、第二振动盘;502、夹爪;503、第三驱动机构;
35.6、出料升降平台;601、出料传送带;602、出料升降组件;
36.7、载具。
具体实施方式
37.为使得本实用新型的目的、特征、优点能够更加的明显和易懂,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,下面所描述的实施例仅仅是本实用新型一部分实施例,而非全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施
例,都属于本实用新型保护的范围。
38.在本实用新型的描述中,需要理解的是,当一个组件被认为是“连接”另一个组件,它可以是直接连接到另一个组件或者可能同时存在居中设置的组件。当一个组件被认为是“设置在”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中设置的组件。
39.此外,术语“长”“短”“内”“外”等指示方位或位置关系为基于附图所展示的方位或者位置关系,仅是为了便于描述本实用新型,而不是指示或暗示所指的装置或原件必须具有此特定的方位、以特定的方位构造进行操作,以此不能理解为本实用新型的限制。
40.以下将结合附图所示的具体实施方式对本实用新型进行详细描述。但这些实施方式并不限制本实用新型,本领域的普通技术人员根据这些实施方式所做出的结构、方法、或功能上的变换均包含在本实用新型的保护范围内。
41.本实用新型提供一种键盘组装装置,适用于将主板、剪刀脚和键帽进行组装的应用场景,使用主传送带实现进料升降平台、若干剪刀脚转移设备、自动压合机以及出料升降平台之间的物料传输,进而达到机械化组装、自动化生产的效果,极大地降低了对人力的依赖,从而提高了生产效率。
42.参见图1~图5,本实施例中,键盘组装装置包括主传送带1、副传送带2和沿所述主传送带1的送料方向依次设置的进料升降平台3、若干剪刀脚转移设备4、自动压合机5以及出料升降平台6。
43.其中,所述副传送带2平行于所述主传送带1,且位于所述主传送带1的下方。进一步地,所述副传送带2和所述主传送带1的送料方向相反。
44.所述进料升降平台3包括进料传送带301和用于驱使所述进料传送带301上下运动的进料升降组件302。当所述进料升降组件302驱使所述进料传送带301往上运动至极限位置时,所述进料传送带301与所述主传送带1平齐;当所述进料升降组件302驱使所述进料传送带301往下运动至极限位置时,所述进料传送带301与所述副传送带2平齐。
45.所述出料升降平台6包括出料传送带601和用于驱使所述出料传送带601上下运动的出料升降组件602。当所述出料升降组件602驱使所述出料传送带601往上运动至极限位置时,所述出料传送带601与所述主传送带1平齐;当所述出料升降组件602驱使所述出料传送带601往下运动至极限位置时,所述出料传送带601与所述副传送带2平齐。
46.开始时,进料传送带301和出料传送带601均往上运动至极限位置,即,进料传送带301和出料传送带601均平齐于主传送带1;进料传送带301上放置有空载的载具7,出料传送带601上并未放置载具7。具体地,键盘组装装置的工作流程如下:
47.①
工人手动或者使用机械手等设备将主板放入进料传送带301的载具7中;
48.②
进料传送带301正向转动,所述进料升降平台3将载具7往前送入所述主传送带1;然后,进料升降组件302驱使所述进料传送带301往下运动至与副传送带2平齐;
49.③
所述主传送带1将载具7输送至所述剪刀脚转移设备4处,所述剪刀脚转移设备4将剪刀脚放入所述载具7内的主板的键位槽中,完成剪刀脚与主板的初步定位;
50.④
所述主传送带1将载具7继续往下输送至自动压合机5,所述自动压合机5将键帽放置于剪刀脚的上方,并往下压合,使得剪刀脚的上端与键帽扣合、下端与主板扣合,进而完成剪刀脚按键的组装;
51.⑤
出料传送带601正向转动,所述主传送带1将装载有主板的载具7送入所述出料升降平台6;
52.⑥
工人手动或者使用机械手等设备将出料传送带601上的载具7中的主板取走,留下空载的载具7;然后,出料升降组件602驱使所述出料传送带601往下运动至与副传送带2平齐;
53.⑦
出料传送带601反向转动,出料升降平台6将空载的载具7送入所述副传送带2;然后,出料升降组件602驱使出料传送带601往上运动至与主传送带1平齐;
54.⑧
进料传送带301反向转动,副传送带2将空载的载具7送入所述进料升降平台3;然后,进料升降组件302驱使进料传送带301往上运动至与主传送带1平齐,等待下一轮的主板装填。
55.可选的,本实施例中,所述剪刀脚转移设备4包括用于存放剪刀脚的第一振动盘401、中转定位治具402、用于将剪刀脚从所述第一振动盘401转移至所述中转定位治具402的第一驱动机构403、用于将剪刀脚从所述中转定位治具402转移至所述主板中的第二驱动机构404以及用于对剪刀脚进行视觉定位的工业摄像头405。
56.具体地,工业摄像头405获取剪刀脚的位置,以便实现剪刀脚的精准转移和判断剪刀脚是否完成安装。
57.可选的,根据键盘按键总数的不同,所述剪刀脚转移设备4的数量可以为一台、两台、三台甚至更多等,不同的剪刀脚转移设备4负责不同按键的组装,例如,设置五台剪刀脚转移设备4:
58.第一台组装24颗剪刀脚,一倍键序号(1-24);
59.第二台组装24颗剪刀脚,一倍键序号(25-48);
60.第三台组装24颗剪刀脚,其中包括一倍键序号(49-64)以及f行序号(65-72);
61.第四台组装21颗剪刀脚,包括f行序号(73-83)以及特殊键序号(84-93);
62.第五台组装13颗剪刀脚,特殊键序号(94-105)。
63.本实施例中,所述自动压合机5包括用于存放键帽的第二振动盘501、用于抓取键帽的夹爪502以及用于驱动所述夹爪502将所述键帽放置于所述剪刀脚上并往下压合的第三驱动机构503。
64.需要说明的是,本实施例中,所述第一驱动机构403、第二驱动机构404和第三驱动机构503均可以为四轴机械手、六轴机械手或者为由x轴电机、y轴电机和z轴电机组成的三向电机组或者为由x轴气缸、y轴气缸和z轴气缸组成的三向气缸组等,本实用新型对此不作限定。
65.进一步地,所述进料升降组件302和出料升降组件602均可以为竖直设置的伸缩气缸或者竖直设置的电机丝杆组件等,本实用新型对此不作限定。
66.本实施例提供的键盘组装装置,具备以下优点:
67.①
能在18s内完成1个按键的组装;
68.②
通过工业摄像头405成像判断剪刀脚的位置,将剪刀脚精准地放置在预设的位置上;
69.③
可以通过工业摄像头405检测判断剪刀脚是否已经被装入主板的键位槽,以防空装;
70.④
设备运转过程中不需要人工操作,实现全自动化。
71.应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施方式中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
72.上文所列出的一系列的详细说明仅仅是针对本实用新型的可行性实施方式的具体说明,它们并非用以限制本实用新型的保护范围,凡未脱离本实用新型技艺精神所作的等效实施方式或变更均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。