1.本发明涉及继电器技术领域,特别是涉及一种无磁驱动自锁型自清洁继电器。
背景技术:
2.目前的继电器的工作原理是通过电磁铁的通电,从而控制继电器的动触点运动,来实现继电器的通断操作;其需要电磁铁的持续通电才能保持高压电路处于接通状态或断开状态,如此导致消耗的电能增加,造成用电成本增加。
技术实现要素:
3.本发明的目的在于克服以上所述的缺点,提供一种无磁驱动自锁型自清洁继电器。
4.为实现上述目的,本发明的具体方案如下:一种无磁驱动自锁型自清洁继电器,包括壳体和驱动装置,所述壳体具有一容置腔,所述驱动装置设于壳体顶部;还包括有设于容置腔内的一第一滑块、一第二滑块、一动触点、两个摆动弹性锁止臂、两个静触点和两个锁止板;所述第一滑块滑动连接在容置腔内,所述第二滑块滑动连接在容置腔内并位于第一滑块的下方,所述第一滑块的上端与驱动装置的输出端连接,所述第一滑块的下端与第二滑块连接,所述动触点固定在第二滑块上,两个所述静触点间隔设置,两个所述静触点均穿设在壳体的底部并与动触点的位置对应;两个所述锁止板对称设置在壳体的内壁上,每个所述锁止板的两端均设置有圆弧状的锁止部,两个所述摆动弹性锁止臂对称设置,两个所述摆动弹性锁止臂分别转动连接在壳体的内侧壁上,两个所述摆动弹性锁止臂的一端均活动铰接在第二滑块上,两个所述摆动弹性锁止臂的另一端一一对应抵靠在两个锁止板上。
5.本发明进一步地,所述摆动弹性锁止臂包括摆臂、滚轮支架、接触滚轮和第一弹簧,所述摆臂转动连接在壳体的内侧壁上,所述摆臂的一端与第二滑块活动铰接,所述第一弹簧设于摆臂内,所述滚轮支架的一端活动伸入摆臂的另一端内后与第一弹簧相抵接,所述接触滚轮抵接在锁止板上。
6.本发明进一步地,所述驱动装置包括定子筒、芯轴以及四个由上往下依次等间隔排列的转子单元;所述定子筒的上下端均固定有端盖,所述定子筒的内壁设有螺旋形的第一鳍片,所述第一鳍片的上表面涂覆有可容纳电荷的第一电极层;所述定子筒内壁固定安装有四个等间隔设置的安装支架,四个所述安装支架呈十字形排布,四个所述安装支架的一端分别对应活动套设于芯轴上;每个所述安装支架的另一端均还固定有与第一电极层电性导通的集电块;所述芯轴转动连接在两个端盖上,且其下端贯穿端盖;四个所述转子单元均活动套设于芯轴上,并一一对应转动连接在四个安装支架上;每个所述转子单元均设有螺旋形的且与第一鳍片平行的第二鳍片,所述第二鳍片的下表面涂覆有可容纳电荷的第二电极层;每个所述转子单元与芯轴之间均设置有用于使转子单元单向驱动芯轴转动的单向
传动机构;位于上方的三个转子单元的下端均安装有与对应的第二电极层电性导通的电刷,每个所述电刷在对应的转子单元转动完成时与对应的集电块电性接触,以使对应的转子单元上的第二电极层上的电荷能够流动至下一转子单元的第二电极层上;位于上方的所述端盖穿设有第一引脚和第二引脚,所述第一引脚和第二引脚间隔设置,所述第一引脚与第一电极层电性导通,所述第二引脚与位于最上方的集电块电性导通;所述芯轴的下端连接有一拨轴,所述拨轴上凸设有第一卡销,所述第一滑块的上端设置有圆环凸轮部,所述圆环凸轮部的内壁开设有用于匹配芯轴单向转动的凸轮槽,所述第一卡销活动嵌设于凸轮槽内,所述第一滑块的下端与第二滑块活动铰接。
7.本发明进一步地,每个所述转子单元均包括环状结构的转子本体,所述第二鳍片设置在转子本体的外壁上,所述转子本体的上端设有第一环槽,所述安装支架的另一端设有圆环部,所述转子本体通过第一环槽转动连接在圆环部上,所述集电块对应设置在圆环部外壁的上端。
8.本发明进一步地,所述单向传动机构包括棘轮以及多个沿周向均布的弹片,所述转子本体的下端设有第二环槽,所述棘轮固定套接在芯轴上并位于第二环槽内,每个所述弹片的一端均固定连接在第二环槽的槽壁上,每个所述弹片的另一端均与棘轮啮合。
9.本发明进一步地,所述第二电极层的表面上覆盖有一层绝缘层。
10.本发明进一步地,还包括设于容置腔内的触点打磨装置,所述触点打磨装置用于周期性对动触点和两个静触点进行打磨清洁。
11.本发明进一步地,所述触点打磨装置包括打磨本体、第二弹簧、第三滑块、打磨片、步进齿条、推块、两个第四滑块和两个锁片,所述打磨本体呈l形状,所述打磨本体固定在壳体的内底壁,所述打磨本体的竖直端沿其长度方向设置有棘齿结构,所述打磨本体的水平端开设有打磨驱动槽,所述第二弹簧的一端通过一端板连接在打磨本体的一端上,两个所述第四滑块间隔设置并分别滑动连接在打磨本体的竖直端上,其中一个所述第四滑块与第二弹簧的另一端固定连接,所述第三滑块滑动套接在两个第四滑块上,所述打磨片升降设于第三滑块上,所述打磨片的周壁设置有导向斜面,所述步进齿条固定在第三滑块上,所述步进齿条上在其相邻齿牙之间开设有避让凹槽,所述推块固定在第二滑块的下端部并位于步进齿条的正上方,两个所述锁片的一端固定在第三滑块上,两个所述锁片的一端能够与打磨本体上的棘齿结构啮合,所述第三滑块的底部弹性连接有一第二卡销,所述第二卡销活动嵌设于打磨驱动槽内;本发明进一步地,所述打磨驱动槽包括依次首尾连接的a段、b段、c段、d段、e段、f段,所述a段和b段的底面高度均高于c段、d段、e段、f段的底面高度,所述f段设有一与a段连接的倾斜面,所述b段朝向远离打磨本体的竖直端的方向倾斜设置,所述c段朝向靠近a段的方向倾斜设置,所述d段与a段平行设置,所述e段朝向打磨本体的竖直端的方向倾斜设置,所述f段与a段处于同一直线上。
12.本发明的有益效果为:本发明通过两个摆动弹性锁止臂与两个锁止板配合,从而能够在动触点与静触点电性接触时对动触点进行锁止,以及在动触点与静触点脱离接触时对动触点进行锁止,从而无需持续通电,节省电能,降低用电成本。
附图说明
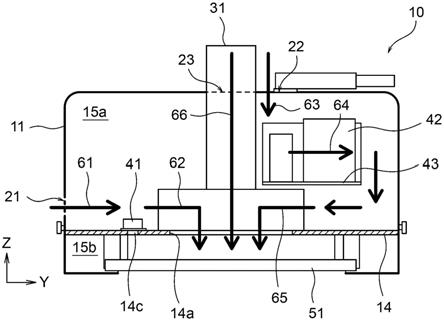
13.图1是本发明的立体图;图2是本发明在动触点处于脱离接触状态时的剖视图;图3是本发明在动触点处于接触锁止状态时的剖视图;图4是本发明在动触点处于脱离接触状态时的部分结构示意图;图5是本发明在动触点处于接触锁止状态时的部分结构示意图;图6是本发明的摆动弹性锁止臂的剖面示意图;图7是本发明的驱动装置的剖面示意图;图8是本发明的驱动装置部分结构的立体图;图9是本发明的驱动装置部分结构另一视角的立体图;图10是本发明的电刷、单向传动机构安装在转子单元上的结构示意图;图11是本发明的单向传动机构的立体图;图12是本发明的定子筒的结构示意图;图13是本发明的安装支架安装在定子筒内的结构示意图;图14是本发明的第一滑块的结构示意图;图15是本发明的触点打磨装置的立体图;图16是本发明的触点打磨装置部分结构的立体图;图17是本发明的打磨本体的立体图;图18是本发明的第二滑块的立体图;附图标记说明:1、壳体;2、驱动装置;21、定子筒;211、端盖;212、第一鳍片;213、第一电极层;22、芯轴;23、转子单元;231、转子本体;232、第二鳍片;233、第二电极层;234、绝缘层;24、安装支架;25、集电块;26、单向传动机构;261、棘轮;262、弹片;27、电刷;28、第一引脚;29、第二引脚;3、第一滑块;31、圆环凸轮部;32、凸轮槽;4、第二滑块;5、动触点;6、摆动弹性锁止臂;61、摆臂;62、滚轮支架;63、接触滚轮;64、第一弹簧;7、静触点;8、锁止板;81、锁止部;9、触点打磨装置;91、打磨本体;911、棘齿结构;912、打磨驱动槽;9121、a段;9122、b段;9123、c段;9124、d段;9125、e段;9126、f段;92、第二弹簧;93、第三滑块;931、第二卡销;94、打磨片;941、导向斜面;95、步进齿条;951、避让凹槽;96、推块;97、第四滑块;98、锁片;99、端板;10、拨轴;101、第一卡销。
具体实施方式
14.下面结合附图和具体实施例对本发明作进一步详细的说明,并不是把本发明的实施范围局限于此。
15.如图1至图18所示,本实施例所述的一种无磁驱动自锁型自清洁继电器,包括壳体1和驱动装置2,所述壳体1具有一容置腔,所述驱动装置2设于壳体1顶部;还包括有设于容置腔内的一第一滑块3、一第二滑块4、一动触点5、两个摆动弹性锁止臂6、两个静触点7和两个锁止板8;所述第一滑块3滑动连接在容置腔内,所述第二滑块4滑动连接在容置腔内并位于第一滑块3的下方,所述第一滑块3的上端与驱动装置2的输出端连接,所述第一滑块3的下端与第二滑块4连接,所述动触点5固定在第二滑块4上,两个所述静触点7间隔设置,两个所述静触点7均穿设在壳体1的底部并与动触点5的位置对应;两
个所述锁止板8对称设置在壳体1的内壁上,每个所述锁止板8的两端均设置有圆弧状的锁止部81,两个所述摆动弹性锁止臂6对称设置,两个所述摆动弹性锁止臂6分别转动连接在壳体1的内侧壁上,两个所述摆动弹性锁止臂6的一端均活动铰接在第二滑块4上,两个所述摆动弹性锁止臂6的另一端一一对应抵靠在两个锁止板8上。
16.本实施例的工作方式是:工作时,第一滑块3处于最高位置,两个摆动弹性锁止臂6指向下方,动触点5与两个静触点7不接触,外界高压电路处于断开状态;在需要接通外界高压电路时,驱动装置2接电,并驱动第一滑块3下探,第一滑块3带动第二滑块4下探,第二滑块4带动两个摆动弹性锁止臂6向上摆动,直至两个摆动弹性锁止臂6处于同一水平方向上时,第二滑块4继续下探,使得两个摆动弹性锁止臂6继续向上摆动而越过水平位置,即两个摆动弹性锁止臂6处于斜向上倾斜状态,此时两个摆动弹性锁止臂6与锁止板8的配合下,对第二滑块4产生向下的下压力,推动第二滑块4继续下探,第二滑块4带动动触点5下探至与两个静触点7电性接触,从而接通外界高压电路,此时两个摆动弹性锁止臂6一一对应与两个锁止板8上端的锁止部81相抵接,从而利用锁止板8的锁止部81对两个摆动弹性锁止臂6进行锁止,进而使得动触点5保持与两个静触点7电性接触,从而使得动触点5处于接触锁止状态;在需要断开外界高压电路时,驱动装置2带动第一滑块3上移,第一滑块3带动第二滑块4上移,第二滑块4驱动两个摆动弹性锁止臂6分别从锁止板8的锁止部81移出,直至两个摆动弹性锁止臂6向下摆动至越过水平位置后,两个摆动弹性锁止臂6处于斜向下倾斜状态,此时两个摆动弹性锁止臂6分别与锁止板8配合,对第二滑块4产生向上的推力,推动第二滑块4上移,直至两个摆动弹性锁止臂6与锁止板8下端上的锁止部81相抵靠,此时锁止部81对两个摆动弹性锁止臂6进行锁止,与此同时第二滑块4带动动触点5上移,使得动触点5与两个静触点7脱离接触,从而实现外界高压电路的断开,从而使得动触点5保持与静触点7处于脱离接触状态。
17.本实施例通过两个摆动弹性锁止臂6与两个锁止板8配合,从而能够在动触点5与静触点7电性接触时对动触点5进行锁止,以及在动触点5与静触点7脱离接触时对动触点5进行锁止,从而无需持续通电,节省电能,降低用电成本。
18.基于上述实施例的基础上,进一步地,所述摆动弹性锁止臂6包括摆臂61、滚轮支架62、接触滚轮63和第一弹簧64,所述摆臂61转动连接在壳体1的内侧壁上,所述摆臂61的一端与第二滑块4活动铰接,所述第一弹簧64设于摆臂61内,所述滚轮支架62的一端活动伸入摆臂61的另一端内后与第一弹簧64相抵接,所述接触滚轮63抵接在锁止板8上。
19.实际使用时,第二滑块4驱动摆臂61摆动,第一弹簧64对滚轮支架62施加弹力,使得接触滚轮63始终与锁止板8抵靠,同时第一弹簧64在摆臂61超过水平位置时对第二滑块4产生斜向下或斜向上的推力,从而使得两个摆动弹性锁止臂6对第二滑块4的推力的合力竖直向下或竖直向上,从而能够推动第二滑块4带动动触点5移动;而在接触滚轮63与圆弧状的锁止部81抵靠时,锁止部81阻挡摆动弹性锁止臂6的进一步偏摆,从而实现对动触点5的锁止。
20.基于上述实施例的基础上,进一步地,所述驱动装置2包括定子筒21、芯轴22以及四个由上往下依次等间隔排列的转子单元23;所述定子筒21的上下端均固定有端盖211,所述定子筒21的内壁设有螺旋形的第一鳍片212,所述第一鳍片212的上表面涂覆有可容纳电
荷的第一电极层213;所述定子筒21内壁固定安装有四个等间隔设置的安装支架24,四个所述安装支架24呈十字形排布,四个所述安装支架24的一端分别对应活动套设于芯轴22上;每个所述安装支架24的另一端均还固定有与第一电极层213电性导通的集电块25;所述芯轴22转动连接在两个端盖211上,且其下端贯穿端盖211;四个所述转子单元23均活动套设于芯轴22上,并一一对应转动连接在四个安装支架24上;每个所述转子单元23均设有螺旋形的且与第一鳍片212平行的第二鳍片232,所述第二鳍片232的下表面涂覆有可容纳电荷的第二电极层233;每个所述转子单元23与芯轴22之间均设置有用于使转子单元23单向驱动芯轴22转动的单向传动机构26;位于上方的三个转子单元23的下端均安装有与对应的第二电极层233电性导通的电刷27,每个所述电刷27在对应的转子单元23转动完成时与对应的集电块25电性接触,以使对应的转子单元23上的第二电极层233上的电荷能够流动至下一转子单元23的第二电极层233上;位于上方的所述端盖211穿设有第一引脚28和第二引脚29,所述第一引脚28和第二引脚29间隔设置,所述第一引脚28与第一电极层213电性导通,所述第二引脚29与位于最上方的集电块25电性导通;所述芯轴22的下端连接有一拨轴10,所述拨轴10上凸设有第一卡销101,所述第一滑块3的上端设置有圆环凸轮部31,所述圆环凸轮部31的内壁开设有用于匹配芯轴22单向转动的凸轮槽32,所述第一卡销101活动嵌设于凸轮槽32内,所述第一滑块3的下端与第二滑块4活动铰接。
21.实际使用时,第一引脚28接电源正极,第二引脚29接电源负极,使得第一电极层213表面聚集大量负电荷,此时从上往下排列的第一个转子单元23的第二电极层233表面聚集大量正电荷,此时第一个转子单元23的第二电极层233与第一电极层213之间由于电场力作用产生吸附力,由于第一电极层213的位置固定,产生的吸附力驱动第一个转子单元23相对定子筒21转动,第一个转子单元23通过单向传动机构26带动芯轴22同步转动,而其余转子单元23保持不动,芯轴22带动拨轴10转动,在第一卡销101与凸轮槽32的配合下,拨轴10驱动第一滑块3下探;当第一个转子单元23带动其上固定的电刷27转动至与对应的集电块25电性接触时,第一个转子单元23上的第二电极层233上的正电荷通过该电刷27进入对应的集电块25,并通过对应的集电块25进入第二个转子单元23上的第二电极层233上,此时第二个转子单元23的第二电极层233与第一电极层213之间由于电场力作用产生吸附力,使得第二个转子单元23相对定子筒21转动,并通过对应的单向传动机构26带动芯轴22转动,芯轴22带动拨轴10转动,拨轴10在第一卡销101与凸轮槽32配合下,驱动第一滑块3下探,第一滑块3带动第二滑块4和动触点5下探;如此依次使得第三个转子单元23和第四个转子单元23分别带动芯轴22转动,芯轴22带动拨轴10转动,从而在第一卡销101与凸轮槽32的配合下,使得第一滑块3下探到位,此时两个摆动弹性锁止臂6越过水平位置并处于斜向上倾斜状态,此时两个摆动弹性锁止臂6驱动第二滑块4带动动触点5下探至与两个静触点7电性接触,并分别与锁止板8上方的锁止部81配合,对动触点5进行锁止,使得动触点5处于接触锁止状态;然后将第一引脚28切换至接地,使得第一电极层213表面上聚集的负电荷导出,导出完毕后,将第一引脚28切换至接电源正极,使得第一电极层213表面聚集正电荷,此时各
个转子单元23上的第二电极层233与第一电极层213均聚集正电荷,第二电极层233与第一电极层213之间在电场力作用下产生排斥力,驱动各个转子单元23反向转动,此时由于各个单向传动机构26的传动单向性,各个转子单元23不会带动芯轴22转动,从而使得各个转子单元23复位至初始位置;在需要断开外界高压电路时,各个转子单元23依次工作,带动芯轴22转动,芯轴22带动拨轴10转动,此时在第一卡销101与凸轮槽32的配合下,拨轴10带动第一滑块3上移,第一滑块3带动第二滑块4上移,第二滑块4驱动两个摆动弹性锁止臂6向下摆动,直至两个摆动弹性锁止臂6越过水平位置后;然后两个摆动弹性锁止臂6驱动第二滑块4带动动触点5复位至脱离接触状态,而各个转子单元23再次复位至初始状态,等待下一次驱动拨轴10转动,以实现驱动动触点5移动。
22.本发明利用四个转子单元23依次在电场力的作用下转动时分别带动芯轴22转动,从而能够使动触点5在接触锁止状态和脱离接触状态之间切换,实现外界高压电路的通断控制,适应使用磁敏感元器件的使用场合,避免对磁敏感元器件造成干扰,保障磁敏感元器件的可靠性。
23.基于上述实施例的基础上,进一步地,每个所述转子单元23均包括环状结构的转子本体231,所述第二鳍片232设置在转子本体231的外壁上,所述转子本体231的上端设有第一环槽,所述安装支架24的另一端设有圆环部,所述转子本体231通过第一环槽转动连接在圆环部上,所述集电块25对应设置在圆环部外壁的上端。
24.本实施例通过在转子本体231上开设第一环槽,以便安装支架24的圆环部嵌入第一环槽内,从而使得转子本体231与安装支架24之间的装配更为紧凑,利于减小整体驱动装置2的体积。
25.基于上述实施例的基础上,进一步地,所述单向传动机构26包括棘轮261以及多个沿周向均布的弹片262,具体地,弹片262的数量为三个,所述转子本体231的下端设有第二环槽,所述棘轮261固定套接在芯轴22上并位于第二环槽内,每个所述弹片262的一端均固定连接在第二环槽的槽壁上,每个所述弹片262的另一端均与棘轮261啮合。
26.实际使用时,转子本体231带动三个弹片262转动,从而通过三个弹片262驱动棘轮261转动,棘轮261带动芯轴22转动,实现将转子本体231的旋转运动传动至芯轴22上;而转子本体231反向转动时,不会通过弹片262驱动棘轮261转动。
27.基于上述实施例的基础上,进一步地,所述集电块25呈圆弧状,所述集电块25的两端分别设置有倒角结构,所述电刷27通过一复位弹簧弹性连接在转子单元23上。
28.具体地,本实施例通过复位弹簧使得电刷27弹性连接在转子本体231的下端,使得电刷27与集电块25接触后,能够保持与集电块25可靠接触,同时在集电块25上设置倒角结构,使得电刷27能够压靠在集电块25的上表面,从而使得集电块25与电刷27之间的接触更为可靠,同时使得前一转子本体231在转动停止的时间段内,下一个转子本体231能够接着继续驱动芯轴22转动,从而实现四个转子单元23在带动芯轴22转动时,能够使得芯轴22连续转动。
29.基于上述实施例的基础上,进一步地,所述第二电极层233的表面上覆盖有一层绝缘层234。本实施例通过设置绝缘层234,保证电荷能够可靠聚集在第二电极层233上,结构更为可靠。
30.基于上述实施例的基础上,进一步地,还包括设于容置腔内的触点打磨装置9,所述触点打磨装置9用于周期性对动触点5和两个静触点7进行打磨清洁。
31.本实施例中,具体地,所述触点打磨装置9包括打磨本体91、第二弹簧92、第三滑块93、打磨片94、步进齿条95、推块96、两个第四滑块97和两个锁片98,所述打磨本体91呈l形状,所述打磨本体91固定在壳体1的内底壁,所述打磨本体91的竖直端沿其长度方向设置有棘齿结构911,所述打磨本体91的水平端开设有打磨驱动槽912,所述第二弹簧92的一端通过一端板99连接在打磨本体91的一端上,两个所述第四滑块97间隔设置并分别滑动连接在打磨本体91的竖直端上,其中一个所述第四滑块97与第二弹簧92的另一端固定连接,所述第三滑块93滑动套接在两个第四滑块97上,所述打磨片94升降设于第三滑块93上,所述打磨片94的周壁设置有导向斜面941,所述步进齿条95固定在第三滑块93上,所述步进齿条95上在其相邻齿牙之间开设有避让凹槽951,所述推块96固定在第二滑块4的下端部并位于步进齿条95的正上方,两个所述锁片98的一端固定在第三滑块93上,两个所述锁片98的一端能够与打磨本体91上的棘齿结构911啮合,所述第三滑块93的底部弹性连接有一第二卡销931,所述第二卡销931活动嵌设于打磨驱动槽912内;本实施例中,具体地,所述打磨驱动槽912包括依次首尾连接的a段9121、b段9122、c段9123、d段9124、e段9125、f段9126,所述a段9121和b段9122的底面高度均高于c段9123、d段9124、e段9125、f段9126的底面高度,所述f段9126设有一与a段9121连接的倾斜面,所述b段9122朝向远离打磨本体91的竖直端的方向倾斜设置,所述c段9123朝向靠近a段9121的方向倾斜设置,所述d段9124与a段9121平行设置,所述e段9125朝向打磨本体91的竖直端的方向倾斜设置,所述f段9126与a段9121处于同一直线上。
32.实际使用时,在第二滑块4下移过程中,第二滑块4带动推块96下探,直至推块96的斜面与步进齿条95的齿牙接触,驱动步进齿条95朝向端板99的方向移动一个单位距离,步进齿条95带动第三滑块93移动一个单位距离,第三滑块93带动两个第四滑块97朝向端板99方向滑动,压缩第二弹簧92储能,同时第三滑块93带动两个锁片98移动一个单位距离后,两个锁片98与打磨本体91上的棘齿结构911再次啮合,对第三滑块93进行单向锁止;如此随着继电器通断次数的积累,当第三滑块93带动第二卡销931从打磨驱动槽912的a段9121进入b段9122后,第三滑块93带动两个锁片98逐渐向远离棘齿结构911的方向运动,直至第二卡销931从b段9122进入c段9123时,两个锁片98与棘齿结构911完全脱离,同时推块96与步进齿条95完全错位,即此时推块96下压时不会与步进齿条95啮合,此时由于c段9123的底面高度低于b段9122,对第二卡销931进行限位,防止在第二弹簧92的弹力作用下使得第二卡销931回退至b段9122,然后在第二弹簧92通过第四滑块97推动第三滑块93移动,使得第二卡销931沿着c段9123运动至d段9124,然后从d段9124运动至e段9125,接着从e段9125运动至f段9126,再从f段9126经过倾斜面回到a段9121位置,在此过程中,当第二弹簧92释放能量驱动第三滑块93沿着c段9123的轨迹运动时,第三滑块93带动打磨片94朝向两个静触点7和动触点5方向移动,此时打磨片94通过其边沿的导向斜面941卡入动触点5与静触点7之间,并在随后的运动中同时对动触点5和静触点7进行打磨清洁,直至第二卡销931沿着e段9125运动时,第三滑块93带动打磨片94远离两个静触点7方向运动,即带动打磨片94脱离与动触点5、静触点7之间的接触,从而完成触点的打磨清洁;如此随着继电器的下一个累计通断次数后,再
次对动触点5和静触点7进行打磨清洁,如此周期性对动触点5和静触点7进行打磨清洁,保证触点的电气性能,避免触点表面附着的灰尘油污等物质碳化后附着于触点表面造成继电器电气性能下降,无需人工打磨清洁。
33.以上所述仅是本发明的一个较佳实施例,故凡依本发明专利申请范围所述的构造、特征及原理所做的等效变化或修饰,包含在本发明专利申请的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。