1.本发明涉及大气物理与大气探测的技术领域,特别涉及基于飞机与双偏振天气雷达的层状云融化层识别方法。
背景技术:
2.层状云融化层的物理特征对于研究层状云垂直结构特征、降水形成机制与微物理特征,优化雷达降水相态识别算法以及提高雷达定量估测降水精度等均具有十分重要的作用。研究层状云融化层的结构特征的微物理过程,首先需要准确识别层状云融化层的边界。
3.现有技术存在反射率垂直廓线vpr特征、回波三维特征和vpr结合等层状云融化层识别手段,并且还进一步在融化层识别中引入了偏振量,形成了利用反射率z、极化退偏比ldr、相关系数ρ
hv
廓线与概念模型匹配关系的方法,以及基于偏振量的相态识别方法。除了天气雷达外,还可基于飞机云降水探测技术来研究云降水微物理特征。利用飞机穿越融化层可有效提升融化层的识别准确率。但是,目前缺乏利用飞机定量研究层状云融化层边界的方法,这导致利用飞机进行层状云融化层识别存在一定的局限性。
技术实现要素:
4.针对现有技术存在的缺陷,本发明提供基于飞机与双偏振天气雷达的层状云融化层识别方法,其首先利用双偏振天气雷达对层状云进行扫描,确定目标降水区域;然后利用飞机在目标区域进行垂直探测,获得环境温度、粒子直径及云粒子图像。根据融化层识别算法mlda和飞机探测的环境温度,估算得到层状云融化层的上下边界;通过分析融化层边界附近的云粒子图像以及降水粒子质量加权平均直径的拐点,从而确定层状云融化层的上边界高度和下边界高度。利用飞机和双偏振天气雷达针对层状云融化层进行协同探测,能够提高层状云融化层边界的识别准确率。
5.本发明提供基于飞机与双偏振天气雷达的层状云融化层识别方法,其特征在于,其包括如下步骤;
6.步骤s1,利用双偏振天气雷达对目标区域进行检测,以此确定目标区域中存在的降水区域;分析所述降水区域对应的双偏振雷达信息,从而确定所述降水区域中层状云融化层的边界;
7.步骤s2,指示飞机在所述层状云进行垂直探测,以此获得所述层状云融化层以上、融化层中以及融化层以下的云粒子图像;分析融化层以上1km到融化层上边界的小云粒子图像演变特征,从而确定所述层状云融化层的上边界高度;
8.步骤s3,指示飞机在所述层状云进行垂直探测,以此获得所述层状云中降水粒子质量加权平均直径dm及其一阶、二阶差分的垂直廓线;分析所述降水粒子质量加权平均直径dm的拐点;根据dm拐点和融化层下边界到下边界以下1km大云粒子图像的演变特征,从而确定所述层状云融化层的下边界高度;
9.进一步,在所述步骤s1中,利用双偏振天气雷达对目标区域进行检测,以此确定目
标区域中存在的降水区域具体包括:
10.利用双偏振天气雷达对目标区域进行扫描检测,以此获得目标区域对应的双偏振雷达信息;
11.从所述双偏振雷达信息中提取得到目标区域对应的云层反射率信息,并根据所述云层反射率信息,确定降水区域;
12.进一步,在所述步骤s1中,分析所述降水区域对应的双偏振雷达信息,从而确定所述降水区域中层状云融化层的边界具体包括:
13.利用融化层识别算法mlda对所述降水区域对应的双偏振雷达参量进行处理;利用融化层识别算法mlda输出结果和飞机探测的环境温度,估算得到所述降水区域中层状云融化层的上边界和下边界;
14.进一步,在所述步骤s2中,指示飞机在所述层状云进行垂直探测,以此获得所述层状云融化层以上、融化层中以及融化层以下的云粒子图像具体包括:
15.指示飞机在所述层状云进行垂直探测,以使飞机在所述估算得到的层状云融化层以上、融化层中和融化层以下区域进行探测,从而获得所述层状云融化层以上、融化层中以及融化层以下的云粒子图像;
16.进一步,在所述步骤s2中,分析融化层以上1km到融化层上边界的小云粒子图像演变特征,从而确定所述层状云融化层的上边界高度具体包括:
17.从融化层以上1km到融化层上边界的小云粒子图像中识别得到冰粒子的形状和相态信息;
18.根据所述冰粒子的形状和相态信息,确定所述层状云融化层以上1km、到融化层上边界的冰粒子形状和相态的演变特征;再根据所述冰粒子形状和相态的演变特征,提取冰粒子形状和相态的转折点;再将所述转折点对应的高度作为层状云融化层的上边界高度;
19.进一步,在所述步骤s3中,
20.指示飞机在所述层状云融化层进行垂直探测,以此获得所述层状云融化层的粒子图像和云微物理量的垂直分布特征;分析所述粒子图像和云微物理量垂直分布特征;根据大云粒子图像随高度的演变特征和云微物理量的垂直分布特征,确定融化层下边界的高度。
21.相比于现有技术,该基于飞机与双偏振天气雷达的层状云融化层识别方法首先利用双偏振天气雷达对层状云进行扫描,确定目标降水区域;然后利用飞机在目标区域进行垂直探测,获得环境温度、粒子直径和云粒子图像。根据融化层识别算法mlda处理结果和环境温度,估算得到层状云融化层的上边界;通过分析融化层上边界附近的粒子图像演变特征,从而确定层状云融化层的上边界高度;通过分析融化层下边界附近的粒子图像演变特征和降水粒子质量加权平均直径的拐点,从而确定层状云融化层的下边界高度。利用飞机和双偏振天气雷达针对层状云融化层进行协同探测,能够提高层状云融化层边界的识别准确率。
22.本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
23.下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
24.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
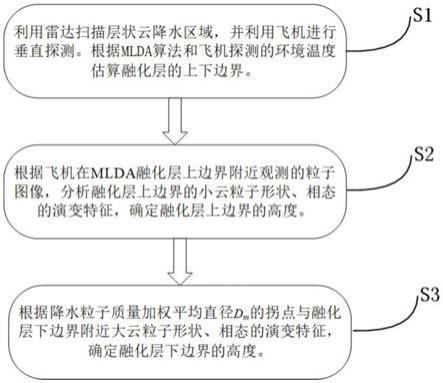
25.图1为本发明提供的基于飞机与双偏振天气雷达的层状云融化层识别方法的流程示意图。
26.图2为本发明提供的基于飞机与双偏振天气雷达的层状云融化层识别方法中层状云融化层对应的粒子图像。
27.图3为本发明提供的基于飞机与双偏振天气雷达的层状云融化层识别方法中飞机探测数据的垂直廓线示意图。
具体实施方式
28.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
29.参阅图1,为本发明实施例提供的基于飞机与双偏振天气雷达的层状云融化层识别方法的流程示意图。该基于飞机与双偏振天气雷达的层状云融化层识别方法包括如下步骤;
30.步骤s1,利用双偏振天气雷达对目标区域进行检测,以此确定目标区域中存在的降水区域;分析该降水区域对应的双偏振雷达信息,从而确定该降水区域中层状云融化层的边界;
31.步骤s2,指示飞机在该层状云进行垂直探测,以此获得该层状云融化层以上、融化层中以及融化层以下的云粒子图像;分析融化层以上1km到融化层上边界的小云粒子图像演变特征,从而确定该层状云融化层的上边界高度;
32.步骤s3,指示飞机在该层状云进行垂直探测,以此获得该层状云中降水粒子质量加权平均直径dm及其一阶、二阶差分的垂直廓线;分析该降水粒子质量加权平均直径dm的拐点;根据dm拐点和融化层下边界到下边界以下1km大云粒子图像的演变特征,从而确定该层状云融化层的下边界高度。
33.上述技术方案的有益效果为:该基于飞机与双偏振天气雷达的层状云融化层识别方法首先利用双偏振天气雷达对目标区域进行检测,并结合融化层识别算法估算得到层状云融化层的上下边界;并利用飞机在目标区域进行垂直探测,以此获得云中的粒子图像和粒子质量加权平均直径。通过分析粒子图像和粒子质量加权平均直径的垂直分布特征,从而确定层状云融化层的上边界高度和下边界高度。利用飞机和双偏振天气雷达针对层状云融化层协同探测的手段,兼顾了雷达遥感和飞机现场探测的优势,能够提高层状云融化层的识别准确率。
34.优选地,在该步骤s1中,利用双偏振天气雷达对目标区域进行检测,以此确定目标区域中存在的降水区域具体包括:
35.利用双偏振天气雷达对目标区域进行扫描检测,以此获得目标区域对应的双偏振雷达信息;
36.从该双偏振雷达信息中提取得到目标区域对应的云层反射率信息,并根据该云层反射率信息,确定降水区域。
37.上述技术方案的有益效果为:通过双偏振天气雷达对目标区域进行雷达扫描检测,这样能够获得目标区域对应的双偏振雷达图像,该双偏振雷达图像包含目标区域中偏振态的云层反射率信息,通过提取并分析其中的云层反射率信息,即可确定目标区域中存在的降水区域。由于降水区域中存在的降水云层的云层反射率是明显区别于其他非降水区域的云层反射率的,基于上述区别即可快速和准确地确定降水区域所存在的位置,这属于本领域常用的降水区域确定方式,其具体确定过程不做详细的累述。
38.优选地,在该步骤s1中,分析该降水区域对应的双偏振雷达信息,从而确定该降水区域中层状云融化层的边界具体包括:
39.利用融化层识别算法mlda对该降水区域对应的双偏振雷达参量进行处理;利用融化层识别算法mlda输出结果和飞机探测的环境温度,估算得到该降水区域中层状云融化层的上边界和下边界。
40.上述技术方案的有益效果为:当确定相应的降水区域后,获取降水区域对应的双偏振雷达信息,并采用融化层识别算法mlda对该双偏振雷达信息进行处理。根据融化层识别算法mlda输出结果和飞机探测的环境温度,能够估算得到该降水区域中层状云融化层的上边界和下边界,其中采用融化层识别算法mlda进行双偏振雷达信息处理属于本领域的常规技术手段,这里不做详细的累述。
41.优选地,在该步骤s2中,指示飞机在该层状云进行垂直探测,以此获得该层状云融化层以上、融化层中以及融化层以下的云粒子图像具体包括:
42.指示飞机在该层状云进行垂直探测,以使飞机在该估算得到的层状云融化层以上、融化层中和融化层以下区域进行探测,从而获得该层状云融化层以上、融化层中以及融化层以下的云粒子图像。
43.上述技术方案的有益效果为:当估算得到层状云融化层的上边界和下边界时,指示飞机利用承载的二维立体光阵列探头2ds、云粒子高清成像仪cpi重点在层状云融化层上边界以上1km、融化层中以及融化层下边界以下1km三个区域进行探测,从而得到层状云融化层以上、融化层中和融化层以下的云粒子图像。
44.优选地,在该步骤s2中,分析融化层以上1km到融化层上边界的小云粒子图像演变特征,从而确定该层状云融化层的上边界高度具体包括:
45.从融化层以上1km到融化层上边界的小云粒子图像中识别得到冰粒子的形状和相态信息;
46.根据该冰粒子的形状和相态信息,确定该层状云融化层以上1km、到融化层上边界的冰粒子形状和相态的演变特征;再根据该冰粒子形状和相态的演变特征,提取冰粒子形状和相态的转折点;再将该转折点对应的高度作为层状云融化层的上边界高度。
47.上述技术方案的有益效果为:冰晶形状主要与温度、湿度等有关。冰晶下落过程中,随着环境温度逐渐升高,冰晶开始融化,形状发生改变。随着温度进一步升高,一些小尺度冰晶融化为球状液滴。该温度所对应的高度即可确定层状云融化层的上边界高度。
48.优选地,在该步骤s2中,根据该冰粒子的形状和相态信息,确定该层状云融化层以上1km到融化层上边界的冰粒子形状和相态的演变特征;再根据该冰粒子形状和相态的演变特征,确定层状云融化层的上边界高度具体包括:
49.根据该冰粒子形状和相态信息以及飞机在层状云融化层上边界附近区域进行垂直探测对应的高度,确定该上边界附近区域的冰粒子形状和相态随高度的演变特征;
50.从该冰粒子的形状和相态的演变特征中提取得到冰粒子形状和相态的转折点,再将该转折点对应的高度作为层状云融化层的上边界高度。
51.上述技术方案的有益效果为:随着环境温度上升,融化层以上的冰晶外形棱角分明,融化层上边界附近冰晶外形圆润,开始出现小尺度的融化状球形冰粒子。根据冰粒子形状和相态的这个变化特征所对应的高度,可准确判定层状云融化层的上边界高度。
52.优选地,在该步骤s3中,指示飞机在该层状云融化层进行垂直探测,以此获得该层状云的降水粒子质量加权平均直径dm具体包括:
53.指示飞机对该层状云进行垂直探测,以此获得该层状云融化层的粒子图像和粒子谱;通过计算,得到该层状云融化层的降水粒子质量加权平均直径dm。分析粒子图像,得到层状云融化层以下区域对应的粒子形状和相态信息,并进一步确定大云粒子形状和相态的演变特征;接着根据该大云粒子形状和相态的演变特征。最后,结合降水粒子质量加权平均直径dm的拐点及大云粒子形状和相态的演变特征,计算得到层状云融化层的下边界高度。
54.下面为该技术飞机与偏振天气雷达的融化层识别方法的具体应用实例:
55.以河北省人工影响天气中心的“空中国王”350人工增雨飞机和x波段双偏振天气雷达对河北中南部一次层状云降水探测过程为例,展示本发明算法的实现过程。采用方案如下:
56.①
利用雷达扫描确定降水区域。根据雷达估测结果,利用飞机进行垂直探测。根据融化层识别算法mlda和飞机观测的环境温度,估算融化层上、下边界。
57.②
利用飞机承载的二维立体光阵列探头2ds、云粒子高清成像仪cpi对层状云进行垂直探测,获取云粒子图像。分析融化层上边界附近的冰粒子形状、相态演变特征。融化层以上的冰晶外形棱角比较清晰,融化层上边界外形模糊,出现小尺度球形及椭球形液滴。根据小云粒子在融化层上边界附近形状、相态的演变特征,确定融化层上边界高度。
58.③
利用飞机承载的高体积降水分光仪hvps探测获取降水粒子谱。根据粒子谱计算降水粒子质量加权平均直径dm,得到dm及其一阶、二阶差分的垂直廓线。在融化层下边界至下边界1km范围内,自下而上搜索dm二阶差分值超过0.5
×
104mm km-2
对应的高度,且该高度
±
150m范围内dm一阶差分值超过100mm km-1
的点即dm拐点。分析融化层下边界附近的大云粒子图像演变特征。根据dm拐点和融化层下边界半融化不规则状冰晶逐渐演变为球形液滴的特征,确定融化层下边界的高度。
59.参阅图2,为本发明提供的基于飞机与双偏振天气雷达的层状云融化层识别方法中层状云融化层不同部位对应的粒子图像。该图2对应的粒子图像直接反映层状云融化层的融化层上边界、融化层中和融化层下边界三个不同部分区域的粒子图像。通过分析该粒子图像能够准确得到融化成上边界和融化层下边界对应的高度,这里不做重复的累述。
60.参阅图3,为本发明提供的基于飞机与双偏振天气雷达的层状云融化层识别方法中飞机探测数据的垂直廓线示意图。该探测数据示意图由左到右依次为层状云环境温度垂
直廓线、降水粒子质量加权平均直径垂直廓线、降水粒子质量加权平均直径dm的一阶差分垂直廓线、降水粒子质量加权平均直径dm的二阶差分垂直廓线。并且图中黑色虚线分别表示层状云融化层的上边界和下边界。
61.从上述实施例的内容可知,该基于飞机与双偏振天气雷达的层状云融化层识别方法首先利用双偏振天气雷达对层状云进行扫描,确定目标降水区域;然后利用飞机在目标区域进行垂直探测,获得环境温度、粒子直径和云粒子图像。根据融化层识别算法mlda处理结果和环境温度,估算得到层状云融化层的上边界;通过分析融化层上边界附近的粒子图像演变特征,从而确定层状云融化层的上边界高度;通过分析融化层下边界附近的粒子图像演变特征和降水粒子质量加权平均直径的拐点,从而确定层状云融化层的下边界高度。利用飞机和双偏振天气雷达针对层状云融化层进行协同探测,能够提高层状云融化层边界的识别准确率。
62.显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
