基于ar与无人机单目视觉的地面目标测量方法及其应用
技术领域
1.本发明属于无人机侦察领域,更具体地,涉及基于ar与无人机单目视觉的地面目标测量方法及其应用。
背景技术:
2.无人机是一种有动力、可控制、可执行多种任务的无人驾驶航空器,近年来,无人机在民用方面的应用也越来越多,广泛应用于公共安全、应急搜救、农林、环保、交通、通信、气象、影视航拍等多个领域。通过无人机搭载的云台相机,以空中视角利用单目视觉测量技术,实现前方地面目标大小的精确测量,可辅助侦察人员提前进行预警和指挥。
3.现有技术中,cn107479059a公开了一种基于无人机的架空线与植被距离测量装置及方法,其在无人机机体上设有飞行控制系统和传感检测集成系统,其中传感检测集成系统与三轴云台增稳系统、成像装置、二维360
°
激光扫描仪、大容量信息存储单元和机载第二通讯模块连接。cn109978948a公开了一种基于视觉的距离测量方法,其通过移动智能终端在n个不同的视角各拍摄一张该实景空间的照片,并进行三维立体重构得到该实景空间的三维立体模型,进而测量实景空间中任意两点间的距离。上述基于无人机的视觉测量仅局限于可见光照片的肉眼识别,或者通过双目立体影像进行一定的图像处理实现空间距离的分析工作。同时,现有专利中使用无人机进行距离测量,通常需要集成的无人机机载传感器较多、硬件成本较高,存在硬件成本较高、处理过程复杂、实时性较差的问题,无法适用于作战环境下进行地面目标实时测量和预警的工作。
技术实现要素:
4.针对现有技术的缺陷,本发明的目的在于提供基于ar与无人机单目视觉的地面目标测量方法及其应用,旨在解决现有的无人机视觉测量方法硬件成本较高,处理过程复杂,实时性较差的问题。
5.为实现上述目的,按照本发明的一方面,提供了基于ar与无人机单目视觉的地面目标测量方法,该方法包括如下步骤:
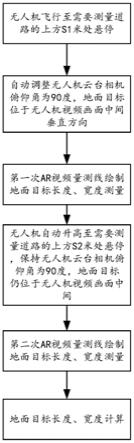
6.s1无人机飞行至距离地面目标s1米高度处悬停并获得第一无人机画面;
7.s2利用ar标绘技术在第一无人机画面中绘制地面目标,并测得该第一无人机画面中地面目标的第一长度和第一宽度;
8.s3控制无人机飞行至距离地面目标s2米高度处悬停并获得第二无人机画面;
9.s4利用ar标绘技术在第二无人机画面中绘制地面目标,并测得该第二无人机画面中地面目标的第二长度和第二宽度;
10.s5根据步骤s2和步骤s4测得的数据计算地面目标几何尺寸。
11.作为进一步优选的,步骤s1和步骤s3中,保持无人机的云台相机俯仰角为90度。
12.作为进一步优选的,步骤s1和步骤s3中,保证地面目标位于无人机画面的中间。
13.作为进一步优选的,步骤s5中,地面目标几何尺寸的计算公式为:
[0014][0015][0016]
式中,l为地面目标的实际长度,r为云台相机的焦距,m为云台相机的长画幅,n为云台相机的短画幅,a1为地面目标的第一长度像素,a2为地面目标的第二长度像素,m为无人机画面的长度像素,w为地面目标的实际宽度,b1为地面目标的第一宽度像素,b2为地面目标的第二宽度像素,n为无人机画面的宽度像素。
[0017]
作为进一步优选的,高度s1和高度s2的关系为1/2~2/1。
[0018]
作为进一步优选的,步骤s2和步骤s4中,长度测量的起点为地面目标的左边缘,长度测量的终点为地面目标的右边缘;宽度测量的起点为地面目标的上边缘,宽度测量的终点为地面目标的下边缘。
[0019]
按照本发明的另一方面,提供了上述基于ar与无人机单目视觉的地面目标测量方法在无人机中的应用。
[0020]
总体而言,通过本发明所构思的以上技术方案与现有技术相比,具有以下有益效果:
[0021]
1.本发明提出无人机单目视觉结合ar技术测量地面目标的几何尺寸,利用在不同高度的无人机画面中地面目标的尺寸计算实际尺寸,能够有效提高原始单目测距方法的可操作性和测量精度,并且能够提前感知、快速计算、精准获取地面侦察目标的大小;
[0022]
2.同时,本发明通过对无人机的角度、位置以及高度进行限定,保证了ar量测线绘制的精准,从而能够进一步提高地面目标尺寸测量的准确度;
[0023]
3.此外,本发明还提供了基于ar与无人机单目视觉的地面目标测量方法在无人机中的应用,能够适应于小型无人机作战环境,提升了无人机侦察的可靠性。
附图说明
[0024]
图1是本发明实施例提供的基于ar与无人机单目视觉的地面目标测量方法的流程图;
[0025]
图2是本发明实施例提供的无人机处于s1米高度处的示意图;
[0026]
图3是本发明实施例提供的无人机处于s2米高度处的示意图;
[0027]
在所有附图中,相同的附图标记用来表示相同的元件或结构,其中:
[0028]
1-无人机,2-相机画幅,3-地面目标。
具体实施方式
[0029]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0030]
如图1~3所示,本发明提出了一种基于ar与无人机单目视觉的地面目标测量方法,该方法包括如下步骤:
[0031]
s1通过无人机地面站指挥无人机1飞行至距离地面目标s1米高度处悬停,切换无人机状态进入目标测量模式,地面站实时显示无人机侦察视频,调节云台相机俯仰角为90度并保证地面目标3位于无人机画面的中间垂直方向,然后获得第一无人机画面,云台相机的焦距为r毫米,云台相机的相机画幅2为m毫米
×
n毫米;
[0032]
s2通过地面站触摸屏,利用ar标绘技术在第一无人机画面中绘制地面目标3,并测得该第一无人机画面中地面目标3长度量测线的像素大小为a1,宽度量测线的像素大小为b1;
[0033]
s3控制无人机飞行至距离地面目标s2米高度处悬停,保持云台相机俯仰角为90度不变并保证地面目标3位于无人机画面的中间垂直方向,然后获得第二无人机画面;
[0034]
s4通过地面站触摸屏,利用ar标绘技术在第二无人机画面中绘制地面目标,并测得该第二无人机画面中地面目标3其长度量测线的像素大小为a2,宽度量测线的像素大小为b2;
[0035]
s5根据步骤s2和步骤s4测得的数据计算地面目标3几何尺寸。
[0036]
进一步,步骤s5中,地面目标3几何尺寸的计算过程为:
[0037]
l=l1
×
[1-l1/(l1 l2)] l2
×
[1-l2/(l1 l2)]
[0038]
w=w1
×
[1-w1/(w1 w2)] w2
×
[1-w2/(w1 w2)]
[0039]
其中,
[0040][0041]
将上式代入得到
[0042][0043][0044]
式中,l为地面目标的实际长度,l1为地面目标的第一长度,l2为地面目标的第二长度,w为地面目标的实际宽度,w1为地面目标的第一宽度,w2为地面目标的第二宽度,l1为无人机画面的第一真实长度,m为无人机画面的长度像素,a1为地面目标的第一长度像素,l2为无人机画面的第二真实长度,a2为地面目标的第二长度像素,w1为无人机画面的第一真实宽度,w2为无人机画面的第二真实宽度,r为云台相机的焦距,m为云台相机的长画幅,n为云台相机的短画幅。
[0045]
进一步,高度s1和高度s2的关系为1/2~2/1,以避免云台相机中地面目标的大小差别过大造成测量不准确,便于利用ar标绘技术在无人机画面中绘制地面目标。
[0046]
进一步,步骤s2和步骤s4中,长度测量的起点为地面目标3的左边缘,长度测量的终点为地面目标的右边缘;宽度测量的起点为地面目标3的上边缘,宽度测量的终点为地面目标的下边缘。
[0047]
本发明提供的基于ar与无人机单目视觉的地面目标测量方法采用ar标绘技术在无人机画面中绘制地面目标,根据云台相机的画幅、无人机画面中地面目标的像素以及无
人机画面的像素即可得到地面目标的实际长度和宽度,不需要使用过多配套硬件,并且处理过程简单,具有较为广泛的适用性。
[0048]
按照本发明的另一方面,提供了上述基于ar与无人机单目视觉的地面目标测量方法在无人机中的应用,适用于小型无人机作战环境,提升无人机侦察的可靠性,能够提前感知、快速计算、准确获取地面侦察目标的大小。
[0049]
本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。