技术特征:
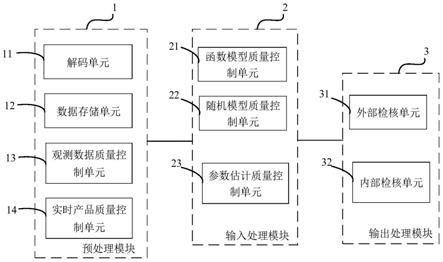
1.一种基于并行计算的卫星导航实时精密单点定位系统,其特征在于,包括预处理模块、输入处理模块和输出处理模块,其中,所述预处理模块用于对获取的原始观测数据数据流、实时钟差产品数据流和实时轨道产品数据流进行解码,并对解码后观测数据中的粗差、周跳和钟跳进行探测及修复,对解码后的实时轨道和实时钟差进行预处理,获得预处理后的观测数据、精密轨道和精密钟差;所述输入处理模块用于根据预处理后的观测数据、精密轨道和精密钟差,建立随机模型和函数模型,并采用参数估计方法获得实时精密单点定位结果;所述输出处理模块用于对所述输入处理模块获取的实时精密单点定位结果进行外部检核和内部检核。2.根据权利要求1所述的基于并行计算的卫星导航实时精密单点定位系统,其特征在于,所述预处理模块包括解码单元、数据存储单元、观测数据质量控制单元和实时产品质量控制单元,其中,所述解码单元用于解码以rtcm3格式获取的原始观测数据数据流、实时钟差产品数据流和实时轨道产品数据流,获得解码后的观测数据、实时轨道和实时钟差;所述数据存储单元用于将解码后的观测数据、实时轨道和实时钟差以一定数据结构进行存储;所述观测数据质量控制单元用于检测所述观测数据中的粗差、周跳和钟跳,并对粗差、周跳和钟跳进行标记、删除或修复;所述实时产品质量控制单元用于对解码后的实时轨道和实时钟差进行质量分析处理,通过拉格朗日插值法进行轨道产品中断后的修复,通过含有周期项的二次多项式钟差预报模型在钟差产品中断后进行预报修复,并采用空间信号精度对实时轨道和实时钟差进行综合质量控制,获得处理后的精密轨道和精密钟差。3.根据权利要求2所述的基于并行计算的卫星导航实时精密单点定位系统,其特征在于,所述观测数据质量控制单元包括粗差探测子单元、周跳探测子单元和钟跳探测子单元,其中,所述粗差探测子单元用于对观测数据进行多频伪距粗差探测,并对探测出的粗差进行剔除;所述周跳探测子单元用于采用单频、双频、三频、四频实时周跳探测与周跳修复算法,探测各卫星系统下载波相位观测量中的周跳并对周跳进行修复;所述钟跳探测子单元用于通过对观测数据进行连续性分析,对所述观测数据进行实时钟跳探测与修复。4.根据权利要求3所述的基于并行计算的卫星导航实时精密单点定位系统,其特征在于,所述粗差探测子单元具体用于:构造粗差检验量:其中,下标1、x分别表示不同卫星系统下的第1频点和与第一频点不同的第x频点,c1和
p1分别表示第1频点的粗码观测值和精码观测值,p
x
表示第x频点的精码观测值,dc1p1表示观测值c1和p1之间的偏差,dp1p
x
表示第1频点和第x频点之间的精码观测值偏差,表示第1频点卫星的观测值c1与p1之间的偏差,表示第1频点和第x频点之间的卫星精码偏差,表示第1频点接收机观测值c1与p1之间的偏差,表示第1频点和第x频点之间的接收机精码偏差,表示不同检验量与时间相关的部分,d
ion
为电离层延迟残余项,ε和分别表示不同检验量残余误差和噪声项之和;构造粗差判断准则:其中,k1、k2均为探测阀值;利用所述粗差检验量和所述粗差判断准则对观测数据中的多频伪距进行粗差识别和定位,并将具有粗差的观测数据进行删除。5.根据权利要求3所述的基于并行计算的卫星导航实时精密单点定位系统,其特征在于,所述钟跳探测子单元具体用于:构建表达式:其中,k和m分别表示历元和卫星,和分别表示第m个卫星第k个历元的伪距观测值和载波相位观测值,和分别表示第m个卫星第k-1个历元的伪距观测值和载波相位观测值,和分别表示第m个卫星第k个历元和第k-1个历元间的伪距观测值变化量和载波相位观测值变化量;构建钟跳探测量:其中,为钟跳探测量,x表示频点序号,m表示第m颗卫星;计算得到钟跳的具体数值:其中,m表示当前历元卫星总数;利用钟跳修正表达式进行钟跳修复,所述钟跳表达式为:
其中,表示载波相位观测值,r表示接收机,x表示频点序号,int()表示向下取整为最接近的整数。6.根据权利要求1所述的基于并行计算的卫星导航实时精密单点定位系统,其特征在于,所述输入处理模块包括函数模型质量控制单元、随机模型质量控制单元和参数估计质量控制单元,其中,所述函数模型质量控制模块用于建立所需参数的函数模型并对所述函数模型进行补偿和精化;所述随机模型质量控制模块用于建立所需参数的随机模型并对所述随机模型进行补偿和精化;所述参数估计质量控制模块用于利用扩展kalman滤波递推公式对建立的观测方程进行线性化和滤波,获得实时精密单点定位结果。7.根据权利要求6所述的基于并行计算的卫星导航实时精密单点定位系统,其特征在于,所述函数模型为gmf映射函数模型。8.根据权利要求6所述的基于并行计算的卫星导航实时精密单点定位系统,其特征在于,所述随机模型为:其中,和分别表示伪距和载波观测值精度,和分别表示伪距和载波观测方程对应的方差,e表示卫星高度角,和分别表示伪距和载波信号噪声,和分别表示经过空间信号距离误差修正后的伪距和载波信号噪声,sisre为空间信号距离误差,α为空间信号距离误差权重系数。9.根据权利要求1所述的基于并行计算的卫星导航实时精密单点定位系统,其特征在于,所述输出处理模块包括内部检核单元和外部检核单元,其中,所述外部检核单元用于通过外部方式获取的定位结果对所述实时精密单点定位结果进行检核并统计精度,输出精度符合要求的结果;所述内部检核单元用于根据位置参数重复性指标或保护水平设计指标对所述实时精密单点定位结果进行检核并统计精度。10.一种基于并行计算的卫星导航实时精密单点定位方法,其特征在于,利用权利要求1至9中任一项所述的基于并行计算的卫星导航实时精密单点定位执行,所述方法包括:s1:对获取的原始观测数据数据流、实时钟差产品数据流和实时轨道产品数据流进行解码,并对解码后观测数据中的粗差、周跳和钟跳进行探测及修复,对解码后的实时轨道和
实时钟差进行预处理,获得预处理后的观测数据、精密轨道和精密钟差;s2:根据预处理后的观测数据、精密轨道和精密钟差,建立随机模型和函数模型,并采用参数估计方法获得实时精密单点定位结果;s3:对所述输入处理模块获取的实时精密单点定位结果进行外部检核和内部检核。
技术总结
本发明公开了一种基于并行计算的卫星导航实时精密单点定位系统和方法,所述系统包括预处理模块、输入处理模块和输出处理模块,其中,预处理模块用于对获取的原始观测数据数据流、实时钟差产品数据流和实时轨道产品数据流进行解码和预处理,获得预处理后的观测数据、精密轨道和精密钟差;输入处理模块建立随机模型和函数模型,并采用参数估计方法以获得实时精密单点定位结果;输出处理模块用于对输入处理模块获取的实时精密单点定位结果进行外部检核和内部检核。本发明采用模块化处理,可对观测数据源采用不同模块参数配置同步并行计算多种模式,后续可根据不同实时模式的运算结果,对中间及最后结果综合分析与评估,确定较优的解算模式。优的解算模式。优的解算模式。
技术研发人员:沈朋礼 成芳 肖厦 卢晓春 李艳红 刘东亮 李晓婉
受保护的技术使用者:中国科学院国家授时中心
技术研发日:2021.12.15
技术公布日:2022/4/15
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。