1.本发明适用于信息技术领域,具体涉及一种电子干扰掩护下的多机空战协同行为模拟方法以及相应的存储介质。
背景技术:
2.电子战飞机对蓝方雷达、制导、无线通讯等装备实施电子侦察、干扰和攻击的飞机。典型空战仿真推演中,电子干扰机作为主要的电子战力量,可掩护红方作战飞机突防并执行攻击任务。然而在实际推演仿真中存在以下情况:一是电子掩护的红方作战飞机数量众多、多架飞机的作战对象等不尽相同,造成干扰机与其他作战飞机的协同困难;二是电子干扰机作为空战的重要力量,承担对敌电子干扰和掩护书红方编队突防的重要任务,易成为蓝方重点打击目标。
3.传统空战仿真推演中的多机型协同问题主要有两类:第一类主要是面向多架次同类作战编队协同中的目标威胁分析和目标攻击分配决策问题,主要方法包括矩阵对策、优化指向向量、优势函数、专家系统等方法。第二类主要是预警机指挥下的多机协同问题,预警机作为战场情报信息获取手段和指挥中枢,主要使用基于威胁评估的多属性决策模型建立目标决策矩阵来分配打击目标。以上两种方法如果用于电子干扰掩护下的多架次作战飞机的混合编队协同作战时,无法确保干扰机的较高生存率,难以适应空战仿真推演协同的对抗性、复杂性等要求。
4.因此,如何能在高效利用干扰机掩护歼击机编队完成特定空中作战任务的同时,又保证干扰机面临蓝方空中作战单元等攻击威胁时仍能保持较高的生存率,成为现有技术亟需解决的技术问题。
5.是一个意义重大但又极具挑战的难题。为有效处理以上空战推演仿真过程中面临的电子干扰掩护下的多机协同复杂问题,
技术实现要素:
6.本发明的目的在于提出一种电子干扰掩护下的多机空战协同行为模拟方法及其存储介质,能够有效处理空战推演仿真过程中面临的电子干扰掩护下的多机协同复杂问题,大幅度提高典型空战仿真推演中红方作战任务完成率和干扰机的生存率,在保证电子干扰机高生存率的前提下,尽可能提高作战任务的完成率。
7.为达此目的,本发明采用以下技术方案:
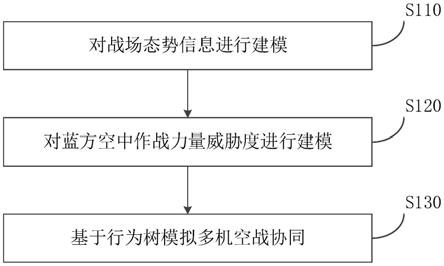
8.一种电子干扰掩护下的多机空战协同行为模拟方法,包括如下步骤:
9.战场态势信息建模步骤s110:
10.根据情报探测装备所能探测到的蓝方战场信息,对战场态势信息进行建模,所述情报探测装置包括红方预警机,所述战场态势信息包括蓝方武器平台的id、类型、武器平台型号、位置信息、航向、速度、受损百分比和生存状态;
11.蓝方目标威胁度建模步骤s120:
12.针对干扰机编队执行打击任务过程中,面临蓝方空中歼击机、和蓝方干扰机编队的直接威胁,对蓝方空中歼击机和干扰机编队的威胁分别进行建模,同时根据红方干扰机编队对两类蓝方威胁程度,判断红方干扰机编队面临的总威胁;
13.基于行为树的多机空中突击协同模拟步骤s130:
14.使用作战行为树的方法模拟红方电子干扰掩护下的歼击机编队执行任务级行动,采用行为树的方式顺序执行“干扰机编队准备”、“初始集结形成编队队形”和“干扰机编队协同执行空中作战任务”三个子树,其中“干扰机编队准备”和“初始集结形成编队队形”两个子树的根节点都是序列节点,其叶节点顺序执行,所述“干扰机编队准备”的2个叶节点顺序为:选择干扰机执行干扰掩护任务;选择歼击机执行空中拦截任务,所述“初始集结形成编队队形”的3个叶节点顺序为:接收任务输入初始集结点坐标;设定干扰机、歼击机巡逻参数;飞往集结点,形成集结队形;“干扰机编队协同执行空中作战任务”子树的根节点设计为序列节点,子树和叶节点顺序执行,其第一个子树设计并行节点,进行蓝方歼击机/干扰机编队威胁条件判断并处理相应威胁的条件子树和“干扰机编队前往进攻准备点”的叶节点并行执行,其余两个叶节点分别为:干扰机编队寻歼蓝方空中重点目标,以及完成作战任务或仿真时间结束,返航至红方机场。
15.可选的,所述战场态势信息建模步骤s110具体为:
16.对于t时刻,包括红方预警机的情报探测装备所获取到的蓝方战场态势信息x(t)={x1(t),x2(t),
…
,xn(t)},n指蓝方武器平台数量,xi(t)表示t时刻蓝方某一作武器平台态势信息,
[0017][0018]
xi(t)=x
i.id
(t),x
i.lx
(t),x
i.xh
(t),x
i.pos
(t),x
i.hx
(t),x
i.speed
(t),x
i.da
(t),x
i.wh
(t)分别表示t时刻蓝方武器平台的id、类型、武器平台型号、位置信息、航向、速度、受损百分比和存活状态。
[0019]
可选的,蓝方目标威胁度建模步骤s120中:
[0020]
对蓝方空中歼击机的威胁进行建模,具体为:
[0021]
蓝方歼击机对红方空中干扰机混合编队构成威胁,假设红方干扰机编队与蓝方歼击机的安全距离为dis
safe.air
,只考虑距离小于安全距离dis
safe.air
的蓝方歼击机,蓝方歼击机xi威胁et
air
通过作战能力威胁指数距离威胁指数角度威胁指数和速度威胁指数表示:
[0022]
作战能力威胁指数:
[0023][0024]
式中分别为蓝方歼击机xi射程、机载弹药量和机载雷达探测
参数,ε
survive.air
、ε
voyage.air
、ε
damaged.air
分别为蓝方歼击机生存系数、航程系数和受损状态系数;
[0025]
距离威胁指数:
[0026]
式中,dis
air.jam
为红方干扰机与蓝方歼击机的距离,为蓝方歼击机速度,v
jam
为红方干扰机速度,为确保干扰机电子干扰掩护,干扰机编队按干扰机速度行进;
[0027]
速度威胁指数:
[0028]
综上,蓝方歼击机的威胁指数t
air
可加权求得:
[0029][0030]
式中,分别为蓝方歼击机作战能力威胁权重系数、距离威胁权重系数和速度威胁权重系数;
[0031]
对当前处于红方干扰机安全距离之内的全部蓝方歼击机分别计算威胁指数,红方干扰机编队按照威胁指数大小排序进行威胁处理,
[0032][0033]
可选的,蓝方目标威胁度建模步骤s120中:
[0034]
对蓝方空中干扰机编队威胁进行建模具体为:
[0035]
蓝方电子干扰机可影响红方预警机探测能力,且处于蓝方电子干扰机干扰范围内的蓝方歼击机对红方干扰机编队构成直接威胁,计算蓝方电子干扰作战编队威胁时须考虑蓝方电子干扰机的电子干扰参数及干扰范围因素,因此,
[0036]
作战能力威胁指数:
[0037][0038]
式中,b
jam
、e
jam
、分别为蓝方干扰机机动参数、干扰参数,ε
survive.jam
、ε
voyage.jam
、ε
damaged.jam
、ε
interference.jam
分别为蓝方干扰机生存系数,航程系数、受损状态系数和电子干扰系数;
[0039]
距离威胁指数:
[0040]
式中,dis
jam.jam
为红方干扰机与蓝方干扰机的距离,r
jam
为蓝方干扰机的干扰距离,r
air
为蓝方歼击机射程,v
air
为蓝方歼击机最大速度,v
jam
为红方干扰机最大速度;
[0041]
蓝方干扰机编队对于红方干扰机的速度威胁指数为:
[0042]
速度威胁指数:
[0043]
式中,v
blue,jam
为蓝方干扰机速度,v
red,jam
为红方干扰机速度;
[0044]
蓝方干扰机编队的威胁指数et
jam
可加权求得:
[0045][0046]
式中,分别为蓝方干扰机编队作战能力威胁权重系数,距离威胁权重系数、速度威胁权重系数。
[0047]
可选的,判断红方干扰机编队面临的总威胁具体为:
[0048]
用et表示红方干扰机编队面临的总威胁指数,如果红方干扰机处于所有蓝方空中作战单元的探测范围之外,只考虑威胁指数最大的威胁,总威胁指数可表示为:
[0049]
et=max(et
air
,et
jam
)
[0050]
如果红方干扰机处于蓝方两类或两类以上作战单元探测范围之内时,需考虑按威胁优先级分别处理,红方干扰机面临的总威胁指数按蓝方干扰机、歼击机的优先级处理:
[0051][0052]
式中thr
jam
,thr
air
分别表示红方干扰机编队对蓝方电子干扰机编队、歼击机的威胁指数阈值。
[0053]
可选的,基于行为树的多机空中突击协同模拟步骤s130中:
[0054]
所述“干扰机编队准备”具体执行为:
[0055]
(1)遍历红方全部作战单元,选择类型为jam的干扰机执行掩护红方进攻任务;
[0056]
(2)遍历典型红方全部作战单元,选择类型为
′
air
′
、载弹量大于0的歼击机执行空中拦截攻击任务。
[0057]
可选的,基于行为树的多机空中突击协同模拟步骤s130中:
[0058]
所述“初始集结形成编队队形”具体执行为:
[0059]
(3)从作战任务获取干扰机和轰炸机混合编队初始集结区域中心点坐标[x,y,height];
[0060]
(4)为干扰机和歼击机设置区域巡逻任务指令参数,包括巡逻区域长度length,巡逻区域宽度width,巡逻区域长轴与正北方向顺时针的夹角direction,巡逻速度v
formation
;
[0061]
(5)干扰机、歼击机起飞飞行至编队初始集结点成初始集结,形成有利于红方执行对破击蓝方空中防御和夺取蓝方指挥所的编队队形。
[0062]
可选的,基于行为树的多机空中突击协同模拟步骤s130中:
[0063]
所述“干扰机编队协同执行空中作战任务”包括
[0064]
(6)开启干扰模式,并预备前往蓝方指挥所附近的进攻准备点
[0065]
干扰机开启干扰模式,红方处于干扰机干扰范围内的歼击机对蓝方预警探测装备不可见,混合编队以干扰机、歼击机的最小速度前往作战任务设定的目标区域;
[0066]
(7)混合编队多机协同处理蓝方空中歼击机威胁
[0067]
当判断存在蓝方空中歼击机威胁时,根据蓝方歼击机威胁程度判断红方干扰机混
合编队的协同迎击策略,利用干扰机掩护歼击机进攻蓝方歼击机,同时保证红方干扰机处于蓝方歼击机射程之外,对于单架歼击机,在保证命中率的前提下,从干扰机编队中选择最近的1架歼击机迎击蓝方歼击机,对于多架歼击机,根据作战威胁指数,和蓝方歼击数量与红方歼击机载弹量之比,对比计算得到红方歼击机数量最优值,从干扰机编队中选择最近的歼击机迎击蓝方歼击机,混合编队中的防护位置由其他无拦截任务歼击机进行补位,防止干扰机混合编队出现防御漏洞;
[0068]
(8)混合编队多机协同处理蓝方干扰机编队威胁
[0069]
当蓝方干扰机编队威胁大于设定的阈值时,红方干扰机编队向红方驱逐舰主动规避,干扰机执行区域巡逻指令开启电子干扰状态下与驱逐舰会和,混合编队中的所有歼击机执行区域巡逻指令并保护干扰机,红方驱逐舰前往进攻准备点,混合编队依托驱逐舰寻歼蓝方目标,即蓝方干扰机;
[0070]
(9)混合编队空战寻歼蓝方空中重点目标
[0071]
混合编队接受作战任务,寻歼蓝方空中重点目标,所述重点目标包括蓝方预警机、轰炸机和干扰机编队,红方干扰机混合编队进行航线规划,采取最短路径行寻歼蓝方重点目标,编队行进过程针对蓝方空中歼击机、干扰机编队威胁,分情况处理相应蓝方威胁,突破蓝方防御体系,执行进攻蓝方空中重点目标的作战任务。
[0072]
可选的,基于行为树的多机空中突击协同模拟步骤s130中:
[0073]
所述“干扰机编队协同执行空中作战任务”还包括
[0074]
(11)完成作战任务或仿真时间结束,干扰机和歼击机编队返航至红方机场。
[0075]
本发明进一步提供了一种存储介质,用于存储计算机可执行指令,计算机可执行指令在被处理器执行时执行上述的电子干扰掩护下的多机空战协同行为模拟方法。
[0076]
本发明具有如下的优点:
[0077]
1、提出的蓝方威胁评估模型,较为准确地评估我方干扰机混合编队所面临的蓝方空中歼击机和干扰机编队威胁,有助于提高威胁处理行动中的蓝方目标和红方兵力匹配度;
[0078]
2、建立基于行为树的干扰机编队多机空战协同作战行为,可高效利用干扰机的掩护能力,使得典型空战仿真推演空中混合编队中电子干扰机与歼击机群的高效协同,综合运用可有效提升红方干扰机的生存率和空中多机空战协同作战任务的完成率。
附图说明
[0079]
图1是根据本发明具体实施例的电子干扰掩护下的多机空战协同行为模拟方法的流程图;
[0080]
图2是根据本发明具体实施例的电子干扰掩护下的多机空战协同行为模拟方法的行为树;
[0081]
图3是根据本发明具体实施例的基于行为树模拟多机空战协同行为的示例性的流程图;
[0082]
图4是根据本发明具体实施例的干扰机、歼击机混合编队集结的示意图;
[0083]
图5是根据本发明具体实施例的红方干扰机范围内的歼击机对蓝方不可见的示意图;
[0084]
图6是根据本发明具体实施例的干扰机混合编队处理单架次蓝方空中歼击机威胁的协同行为的示意图;
[0085]
图7是根据本发明具体实施例的干扰机混合编队处理多架次蓝方空中歼击机威胁的协同行为的示意图;
[0086]
图8是根据本发明具体实施例的红方干扰机混合编队回撤至驱逐舰位置规避蓝方干扰机编队威胁的示意图;
[0087]
图9是根据本发明具体实施例的红方干扰机与驱逐舰同步前往进攻准备点的示意图;
[0088]
图10是根据本发明具体实施例的无蓝方威胁时干扰机混合编队进攻方向与阵形的示意图;
[0089]
图11是根据本发明具体实施例的基于行为树模拟红方干扰机编队处理蓝方空中威胁的示意图;
[0090]
图12是根据本发明具体实施例的是否具有威胁建模和干扰机协同情况下的干扰机生存率的比较图;
[0091]
图13是根据本发明具体实施例的是否具有威胁建模和干扰机协同情况下的作战任务完成率的比较图。
具体实施方式
[0092]
下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部结构。
[0093]
本发明主要在于:对战场态势信息进行建模,对蓝方空中作战力量威胁度进行建模,基于行为树对多机空战协同进行模拟,有效解决了电子干扰机与红方多数量作战飞机作战协同难题,大幅提升了典型空战仿真推演中红方作战任务完成率和干扰机的生存率。
[0094]
具体的,在典型空战仿真推演场景中,红方电子干扰掩护下的多机型编队面临蓝方海上驱逐舰和地面防空火力威胁。作战过程中,电子干扰掩护下的多机型编队需要根据战场态势分析判断蓝方威胁程度,根据威胁度再判断执行多机协同攻击或规避等战术行为。本发明在准确判断处理蓝方威胁的前提下,依托电子干扰掩护下歼击机群高效空战协同战术行为,尽可能多的摧毁蓝方空中有生力量和重点目标,并保证电子干扰机较高的生存率。
[0095]
具体的,参见图1,示出了根据本发明具体实施例的电子干扰掩护下的多机空战协同行为模拟方法的流程图,包括如下步骤:
[0096]
战场态势信息建模步骤s110:
[0097]
根据情报探测装备所能探测到的蓝方战场信息,对战场态势信息进行建模,所述情报探测装置包括红方预警机,所述战场态势信息包括蓝方武器平台的id、类型、武器平台型号、位置信息、航向、速度、受损百分比和生存状态。
[0098]
具体的,本步骤具体为:
[0099]
t时刻,包括红方预警机的情报探测装备所获取到的蓝方战场态势信息x(t)={x1(t),x2(t),
…
,xn(t)},n指蓝方武器平台数量,xi(t)表示t时刻蓝方某一作武器平台态势信
息,
[0100][0101]
xi(t)=x
i.id
(t),x
i.lx
(t),x
i.xh
(t),x
i.pos
(t),x
i.hx
(t),x
i.speed
(t),x
i.da
(t),x
i.wh
(t)分别表示t时刻蓝方武器平台的id、类型、武器平台型号、位置信息、航向、速度、受损百分比和存活状态。
[0102]
进一步的,参见表1,列出了本发明的建模步骤中可能涉及到的符号。
[0103]
表1本发明所使用到的符号
[0104]
[0105][0106]
蓝方目标威胁度建模步骤s120:
[0107]
干扰机编队执行打击任务过程中,面临蓝方空中歼击机、干扰机编队等作战单元的直接威胁,在空战过程中,应尽可能保持红方干扰机所面临的蓝方威胁处于可接受程度,因此需要对面临的蓝方空中歼击机和干扰机编队威胁进行建模。
[0108]
因此,本步骤为:针对干扰机编队执行打击任务过程中,面临蓝方空中歼击机、和蓝方干扰机编队的直接威胁,对蓝方空中歼击机和干扰机编队的威胁分别进行建模,同时根据红方干扰机编队对两类蓝方威胁程度,判断红方干扰机编队面临的总威胁。
[0109]
对蓝方空中歼击机的威胁进行建模,具体为:
[0110]
对红方干扰机构成威胁来源之一是蓝方歼击机等空对空作战单元。假设红方干扰机编队与蓝方歼击机的安全距离为dis
safe.air
,只考虑距离小于安全距离dis
safe.air
的蓝方歼击机,蓝方歼击机xi威胁et
air
通过作战能力威胁指数距离威胁指数角度威胁指数和速度威胁指数表示:
[0111]
作战能力威胁指数:
[0112][0113]
式中分别为蓝方歼击机xi射程、机载弹药量和机载雷达探测参数,ε
survive.air
、ε
voyage.air
、ε
damaged.air
分别为蓝方歼击机生存系数、航程系数和受损状态系数。
[0114]
距离威胁指数:
[0115]
式中,dis
air.jam
为红方干扰机与蓝方歼击机的距离,为蓝方歼击机速度,v
jam
为红方干扰机速度,通常情况下,歼击机飞行速度大于干扰机飞行速度,为确保干扰机电子干扰掩护,干扰机编队按干扰机速度行进。
[0116]
速度威胁指数:
[0117]
综上,蓝方歼击机的威胁指数t
air
可加权求得:
[0118][0119]
式中,分别为蓝方歼击机作战能力威胁权重系数、距离威胁权重系数和速度威胁权重系数。
[0120]
对当前处于红方干扰机安全距离之内的全部蓝方歼击机分别计算威胁指数,红方干扰机编队按照威胁指数大小排序进行威胁处理。
[0121][0122]
对蓝方空中干扰机编队威胁进行建模具体为:
[0123]
典型空战仿真推演中,蓝方电子干扰机可影响红方预警机探测能力,且处于蓝方电子干扰机干扰范围内的蓝方歼击机对红方干扰机编队构成直接威胁,计算蓝方电子干扰作战编队威胁时须考虑蓝方电子干扰机的电子干扰参数及干扰范围因素,因此,
[0124]
作战能力威胁指数:
[0125][0126]
式中,b
jam
、e
jam
、分别为蓝方干扰机机动参数、干扰参数,ε
survive.jam
、ε
voyage.jam
、ε
damaged.jam
、ε
interference.jam
分别为蓝方干扰机生存系数,航程系数、受损状态系数和电子干扰系数。
[0127]
距离威胁指数:
[0128]
式中,dis
jam.jam
为红方干扰机与蓝方干扰机的距离,r
jam
为蓝方干扰机的干扰距离,r
air
为蓝方歼击机射程,v
air
为蓝方歼击机最大速度,v
jam
为红方干扰机最大速度。计算蓝方干扰机编队的距离威胁时,需要考虑蓝方歼击机在其干扰机的干扰范围内对红方预警探测单元不可见。为安全起见,需要在蓝方干扰机与红方干扰机的距离dw上减去蓝方干扰机的干扰距离r
jam
即为蓝方干扰机编队中的歼击机与红方干扰机的真实距离。
[0129]
因蓝方干扰机编队对于红方干扰机的威胁主要来自于其干扰机编队中的歼击机,如果蓝方歼击机脱离其干扰机编队,威胁计算由歼击机威胁度建模部分完成。此处假定干扰机编队以干扰机速度飞行,因此速度威胁指数仍以电子干扰机速度计算。
[0130]
速度威胁指数:
[0131]
式中,v
blue,jam
为蓝方干扰机速度,v
red,jam
为红方干扰机速度。
[0132]
综上,蓝方干扰机编队的威胁指数et
jam
可加权求得:
[0133][0134]
式中,分别为蓝方干扰机编队作战能力威胁权重系数,距离威胁权重系数、速度威胁权重系数。
[0135]
判断红方干扰机编队面临的总威胁具体为:
[0136]
用et表示红方干扰机编队面临的总威胁指数,如果红方干扰机处于所有蓝方空中作战单元的探测范围之外,只考虑威胁指数最大的威胁,总威胁指数可表示为:
[0137]
et=max(et
air
,et
jam
)
[0138]
如果红方干扰机处于蓝方两类或两类以上作战单元探测范围之内时,需考虑按威胁优先级分别处理,红方干扰机面临的总威胁指数按蓝方干扰机、歼击机的优先级处理:
[0139][0140]
式中thr
jam
,thr
air
分别表示红方干扰机编队对蓝方电子干扰机编队、歼击机的威胁指数阈值。
[0141]
基于行为树的多机空中突击协同模拟步骤s130:
[0142]
本步骤的思路为:基于前述的蓝方空中威胁度建模,使用作战行为树的方法模拟红方电子干扰掩护下的歼击机编队执行任务级行动;执行任务过程中混合编队高效协同,同时根据蓝方空中威胁度处理红方混合编队面临的蓝方干扰机编队和歼击机威胁;在保证红方干扰机相对安全的前提下、突破蓝方防空体系和攻击蓝方重点目标。
[0143]
参见图2,本步骤为:使用作战行为树的方法模拟红方电子干扰掩护下的歼击机编队执行任务级行动,采用行为树的方式顺序执行“干扰机编队准备”、“初始集结形成编队队形”和“干扰机编队协同执行空中作战任务”三个子树,其中“干扰机编队准备”和“初始集结形成编队队形”两个子树的根节点都是序列节点,其叶节点顺序执行,所述“干扰机编队准备”的2个叶节点顺序为:选择干扰机执行干扰掩护任务;选择歼击机执行空中拦截任务,所述“初始集结形成编队队形”的3个叶节点顺序为:接收任务输入初始集结点坐标;设定干扰机、歼击机巡逻参数;飞往集结点,形成集结队形;“干扰机编队协同执行空中作战任务”子树的根节点设计为序列节点,子树和叶节点顺序执行,其第一个子树设计并行节点,进行蓝方歼击机/干扰机编队威胁条件判断并处理相应威胁的条件子树和“干扰机编队前往进攻准备点”的叶节点并行执行,其余两个叶节点分别为:干扰机编队寻歼蓝方空中重点目标,以及完成作战任务或仿真时间结束,返航至红方机场。
[0144]
参见图3,示出了基于行为树模拟多机空战协同的示例性的流程图。
[0145]
所述“干扰机编队准备”具体执行为:
[0146]
(1)遍历红方全部作战单元,选择类型为jam的干扰机执行掩护红方进攻任务;
[0147]
(2)遍历典型红方全部作战单元,选择类型为
′
air
′
、载弹量大于0的歼击机执行空中拦截攻击任务;
[0148]
所述“初始集结形成编队队形”具体执行为:
[0149]
(3)从作战任务获取干扰机和轰炸机混合编队初始集结区域中心点坐标[x,y,
height];
[0150]
(4)为干扰机和歼击机设置区域巡逻任务指令参数,包括巡逻区域长度length,巡逻区域宽度width,巡逻区域长轴与正北方向顺时针的夹角direction,巡逻速度v
formation
。
[0151]
(5)干扰机、歼击机起飞飞行至编队初始集结点成初始集结,形成有利于红方执行对破击蓝方空中防御和夺取蓝方指挥所的编队队形。
[0152]
示例性的,如图4所示,干扰机处于中心位置,歼击机分散方向部署于干扰机外侧位置。歼击机处于干扰机干扰范围外沿,保证其在干扰机掩护之下且对蓝方空中目标攻击射击距离最近,命中率更高。
[0153]
所述“干扰机编队协同执行空中作战任务”包括
[0154]
(6)开启干扰模式,并预备前往蓝方指挥所附近的进攻准备点
[0155]
干扰机开启干扰模式,红方处于干扰机干扰范围内的歼击机对蓝方预警探测装备不可见,混合编队以干扰机、歼击机的最小速度前往作战任务设定的目标区域,具体如图5所示;
[0156]
示例性的:
[0157]
设置红方干扰机的干扰模式,向干扰机下达指令开启干扰机区域干扰模式,其中jam_unit[
′
id
′
]为红方干扰机id、jam_unit[
′
pos
′
]为红方干扰机实时位置。作战任务设定以干扰机为编队中心,利用其电子干扰能力掩护红方歼击机编队进攻,direction为干扰机区域干扰指令所在区域长轴与正北方向的夹角;红方干扰机的其他干扰区域参数,包括干扰区域长度length,干扰区域宽度width;干扰时长disturb_time,此处设为推演仿真全程时间。
[0158]
包括红方干扰机和歼击机混合编队在行进过程中,面临的蓝方空中威胁主要来自于蓝方空中歼击机(编队)和空中干扰机编队,须分情况相应处理蓝方的威胁,突破蓝方防御体系,执行进攻蓝方指挥所的作战任务。其中,基于作战行为树的蓝方空中威胁时的高效协同处理方式,示例性的如图11所示。
[0159]
(7)混合编队多机协同处理蓝方空中歼击机威胁
[0160]
当判断存在蓝方空中歼击机威胁时,根据蓝方歼击机威胁程度判断红方干扰机混合编队的协同迎击策略,利用干扰机掩护歼击机进攻蓝方歼击机,同时保证红方干扰机处于蓝方歼击机射程之外,对于单架歼击机,在保证命中率的前提下,从干扰机编队中选择最近的1架歼击机迎击蓝方歼击机,对于多架歼击机,根据作战威胁指数,和蓝方歼击数量与红方歼击机载弹量之比,对比计算得到红方歼击机数量最优值,从干扰机编队中选择最近的歼击机迎击蓝方歼击机,混合编队中的防护位置由其他无拦截任务歼击机进行补位,防止干扰机混合编队出现防御漏洞。
[0161]
具体而言,当红方干扰机混合编队仅面临蓝方歼击机威胁时,存在et=et
air
>thr
air
,此时,根据蓝方歼击机威胁程度判断红方干扰机混合编队的协同迎击策略。在典型空战仿真推演中,歼击机可多通道发射空空导弹,假定红方歼击机载弹量为air
playload
。为确保命中率,需保证蓝方1架歼击机被红方2枚导弹锁定。因此,需满足thr
air
<et
air
<thr
air.2
且num
air.enemy
≤air
playload
/2,即歼击机威胁度处于最小阈值thr
air
和限值thr
air.2
之间且蓝方歼击数量小于等于红方歼击机载弹量一半时,从干扰机编队中选择最近的1架歼击机迎击蓝方歼击机。
[0162]
假设红方干扰机有效干扰范围半径为r
jam
,蓝方歼击机与红方干扰机距离为dis
air.jam
<dis
safe.air
,蓝方歼击机与红方歼击机射程同为r
air
。由于红方歼击机位于干扰机有效干扰范围边缘位置对蓝方预警探测单元不可见,红方歼击机距蓝方歼击机的距离为dis
air.air
=dis
air.jam-r
jam
。红方歼击机在编队中处于干扰机有效干扰范围边缘且均匀分布,可选距离最近的歼击机执行对蓝方空中单架歼击机攻击任务。
[0163]
具体的,如图6所示,示出了干扰机混合编队处理单架次蓝方空中歼击机威胁的协同行为的示意图。
[0164]
仿真推演环境设定己敌双方歼击机中1枚导弹即可被摧毁,红方歼击机对空攻击距离与射程比range=0.9,保证更高的命中率。此种情况下,当蓝方歼击机处于红方歼击机射程内时,红方干扰机处于蓝方歼击机射程之外,即dis
air.air
《r
jam
∩dis
air.jam
》r
jam
,因此红方干扰机是安全的。
[0165]
当et
air
≥thr
air.2
时,即需要出动多架红方歼击机迎击,根据蓝方歼击机作战威胁指数计算出动拦截的红方歼击机架次数量如下所示。
[0166][0167]
从战场态势获取蓝方歼击机数量为num
air.enemy
,根据蓝方歼击数量与红方歼击机载弹量计算应出动拦截的红方歼击机架次数量为
[0168]
为确保红方干扰机安全,在应对蓝方歼击机威胁过程中,实际出去的红方歼击机数量以前两种方式计算得到的最大值为准,即num
attack.air
=max(num
attack.air_1
,num
attack.air_2
)。
[0169]
需要红方多架歼击机迎击蓝方歼击机时,同样选择最近的num
attack.air
架,为保证红方歼击机达到最大作战效能,打击时计算每架蓝方歼击机被攻击导弹数为2枚。前出拦截歼击机的在编队中的防护位置由其他无拦截任务歼击机进行补位,防止干扰机混合编队出现防御漏洞。
[0170]
如图7所示,示出了干扰机混合编队处理多架次蓝方空中歼击机威胁的协同行为。
[0171]
(8)混合编队多机协同处理蓝方干扰机编队威胁
[0172]
当蓝方干扰机编队威胁et
jam
大于设定的阈值时,红方干扰机编队向红方驱逐舰主动规避,干扰机执行区域巡逻指令开启电子干扰状态下与驱逐舰会和,混合编队中的所有歼击机执行区域巡逻指令并保护干扰机,红方驱逐舰前往进攻准备点,混合编队依托驱逐舰寻歼蓝方目标,即蓝方干扰机。
[0173]
红方干扰机编队寻歼蓝方空中重点目标过程中,如果面临的蓝方干扰机编队威胁
et
jam
大于设定的阈值,根据蓝方作战武器平台威胁建模可知,此时需要优先处理蓝方干扰机编队威胁,即et=et
jam
。
[0174]
红方干扰机作为掩护我方空中作战力量空防执行对蓝方重点目标攻击任务的重要作战资源,提高其生存率将会极大有利于提高红方空中作战任务的成功率。加之蓝方干扰机的电子干扰作用致其干扰机编队中的歼击机不可见,故应依托红方最近的驱逐舰our_ship_unit处理蓝方干扰机编队威胁。
[0175]
1)干扰机编队向红方驱逐舰方向主动规避。
[0176]
红方干扰机编队最近的红方驱逐舰的实时坐标为our_ship_unit[
′
pos
′
],当蓝方干扰机编队威胁存在时(et=et
jam and et≠0),红方干扰机编队中所有作战单元执行以驱逐舰实时坐标our_ship_unit[
′
pos
′
]的中心点的区域巡逻指令。
[0177]
a)干扰机执行区域巡逻指令make_disturb_areapatrol开启电子干扰状态下前往驱逐舰实时坐标点。
[0178][0179]
其中jam_unit[
′
id
′
]为红方干扰机id、our_ship_unit[
′
pos
′
]为红方驱逐舰实时坐标位置,direction为驱逐舰实时坐标位置所在区域长轴与正北方向的夹角;设定红方干扰机的干扰区域参数,包括干扰区域长度length,干扰区域宽度width;disturb_time为干扰机干扰时,此处设为推演仿真全程时间。
[0180]
b)循环干扰机混合编队中的所有歼击机执行区域巡逻指令make_disturb_areapatrol前往设定驱逐舰实时坐标位置规避蓝方干扰机编队威胁,具体的,如图8所示,红方干扰机混合编队回撤至驱逐舰位置规避蓝方干扰机编队威胁。
[0181]
foraircraft_unitinour_air_team_units:
[0182][0183]
其中our_air_team_units,表示干扰机混合编队中的全部红方歼击机unit合集,aircraft_unit[
′
id
′
]为红方歼击机id、our_ship_unit[
′
pos
′
]为红方驱逐舰实时坐标位置,direction为驱逐舰实时坐标位置所在区域长轴与正北方向的夹角;设定红方歼击机前往设定驱逐舰实时位置执行区域巡逻的区域参数与,包括区域长度length,区域宽度width;v
attack
=min(v
air
,v
jam
)为歼击机的巡逻速度,因歼击机与干扰机级成混合编队,因此巡逻速度应以歼击机、干扰机两者速度之小的速度为准。patrol_time为歼击机的区域巡逻时间,patrol_mode表示歼击机的巡逻模式,默认设为0表示普通模式。
[0184]
2)干扰机接近红方驱逐舰实时坐标位置,依托驱逐舰寻歼蓝方目标。
[0185]
判断红方干扰机所在位置与驱逐舰实时位置的距离dis
our.jam.ship
,如果dis
our.jam.ship
<r
jam
,即红方干扰机与红方驱逐舰的距离小于干扰机的干扰范围,此时红方驱逐舰处于干扰机电子干扰掩护之下,驱逐舰对蓝方不可见。
[0186]
a)红方驱逐舰执行命令make_ship_areapatrol前往进攻准备点,
[0187][0188]
其中,our_ship_unit[
′
id
′
]为红方驱逐舰id、general_attack_point为红方干扰机编队进攻准备点位置,direction进攻准备点所在区域长轴与正北方向的夹角;设定红方歼击机到达进攻准备点执行区域巡逻的区域参数,包括区域长度length,区域宽度width;v
ship
为红方驱逐舰的航行速度,patrol_time为驱逐舰的区域巡逻时间,patrol_mode表示驱逐舰的巡逻模式,默认设为0代表普通模式。
[0189]
b)干扰机执行区域巡逻指令make_disturb_areapatrol前往设定进攻准备点执行电子干扰任务。
[0190][0191]
其中v
ship
指干扰机的航行速度,此处依托驱逐舰的对空防护能力,故干扰机以驱逐舰的速度前往进攻准备点。
[0192]
c)循环干扰机混合编队中的所有歼击机执行区域巡逻指令make_disturb_areapatrol前往设定进攻准备点执行电子干扰任务。
[0193]
foraircraft_unitinour_air_team_units:
[0194][0195]
其中v
ship
指干扰机混合编队中的歼击机群的飞行速度,此处依托驱逐舰的对空防护能力,故以驱逐舰的速度进攻准备点。
[0196]
此时,如图9所示,红方干扰机混合编队与驱逐舰同步前往进攻准备点。
[0197]
(9)混合编队空战寻歼蓝方空中重点目标
[0198]
干扰机、歼击机群混合编队接受作战任务,寻歼蓝方重点目标,所述重点目标包括蓝方预警机、轰炸机和干扰机编队。红方干扰机混合编队进行航线规划,采取最短路径行寻歼蓝方重点目标,如图10所示。编队行进过程中可能会遭遇蓝方空中歼击机、干扰机编队威胁,须分情况处理相应蓝方威胁,突破蓝方防御体系,执行进攻蓝方空中重点目标的作战任务。
[0199]
具体的,如图10所示,示出了无蓝方威胁时干扰机混合编队进攻方向与阵形。
[0200]
所述“干扰机编队协同执行空中作战任务”还包括
[0201]
(11)完成作战任务或仿真时间结束,干扰机和歼击机编队返航至红方机场。
[0202]
具体实施例:
[0203]
本发明进一步公开了一种利用上述的电子干扰掩护下的多机空战协同行为模拟方法进行仿真计算的例子。
[0204]
(一)海空联合作战仿真推演场景
[0205]
1.推演想定
[0206]
红方对某海域南、北两岛拥有主权,但被蓝方长期非法占有。红方企图通过武力收回被占岛屿,红方集结空海力量突击南北岛指挥所,蓝方加强空中防御力量负隅顽抗,红方
在进攻指挥所前肃清蓝方空中重点目标。
[0207]
战场区域:600km
×
600km
[0208]
推演时长:3小时
[0209]
2.作战任务
[0210]
2.1.蓝方作战任务
[0211]
依托空中防空力量,守卫南北岛屿2个指挥所。
[0212]
2.2.红方作战任务
[0213]
综合运用干扰机和歼击机空中作战力量,肃清蓝方空中防御力量,为最终摧毁蓝方2个指挥所重点目标创造有利条件。
[0214]
3.兵力设置
[0215]
3.1.蓝方兵力设置
[0216]
针对防御作战特点,体现陆海空立体防空兵力运用,为蓝方设置4种兵力共49个作战单位,以完成预警探测、空中防卫等任务,如表2所示。
[0217]
表2蓝方兵力设置
[0218][0219]
3.2.红方兵力设置
[0220]
针对海空兵力特点,结合决策复杂度,为红方设置5种兵力共29个作战单位,以完成侦察、预警、干扰、制空等任务,如表3所示。
[0221]
表3红方兵力设置
[0222][0223]
4.装备性能设置
[0224]
装备性能以互联网公开参数为基础,同时为满足特定作战空间条下博弈比赛对抗性、均衡性等要求,进行适应性调整,具体如表4和表5所示。
[0225]
表4装备探测/攻击性能参数
[0226][0227][0228]
表5装备配备武器参数
[0229][0230]
5.主要作战计划
[0231]
红方作为进攻方,进攻目标为蓝方指挥所,面临蓝方空中歼击机和干扰机编队威胁,红方主需综合运用驱逐舰、干扰机的电子干扰作用掩护歼击机混合编队完成对破击蓝方空中防御力量的任务。
[0232]
作战计划分为两个阶段:
[0233]
5.1.初始集结阶段
[0234]
完成红方主要作战装备的集结编队,红方干扰机、歼击机等空中主力作战单元于初始集结点初完成集结,形成干扰机居中、歼击机在外的两层编队队形,有效利用红方干扰机掩护歼击机肃清蓝方空中防御力量。
[0235]
5.2.寻歼蓝方空中重点目标
[0236]
初始集结完成后,干扰机、歼击机混合编队保持队形前往作战任务设定的作战区域寻歼蓝方空中重点目标,在此过程中可能遇到蓝方的空中歼击机和干扰机编队威胁,需分别处理,尽可能保证干扰机较高的生存率。
[0237]
(二)详细实施案例
[0238]
1.遍历典型空战仿真推演场景中红方全部作战单元obs['units
′
],选择类型为
′
jam
′
的干扰机unit掩护红方歼击机执行空中截击任务;
[0239][0240]
2.遍历典型空战仿真推演场景中红方全部作战单元obs[
′
units
′
],选择类型为
′
air
′
、载弹量大于0的歼击机unit单元加入红方歼击机列表,其中
′
170
′
指歼击机挂载的空空导弹,得到红方全部可用歼击机的列表,每个列表元素为一架飞机的unit数据,如下式:
[0241][0242]
从作战任务获取干扰机混合编队的初始集结区域中心点坐标[180
×
1000,27
×
1000,8000]。
[0243]
3.分别设定干扰机、歼击机飞往初始集结区域执行区域巡逻的相关参数,包括巡逻区域长度length=30*1000,巡逻区域宽度width=30*1000,巡逻区域长轴与正北方向顺时针的夹角direction=90,速度
[0244]
4.干扰机、歼击机群分别执行起飞区域巡逻指令,飞往初始集结区域执行区域巡逻任务:
[0245]
4.1.1架干扰机起飞至初始集结区域执行区域巡逻:
[0246][0247]
4.2.24架歼击机起飞至初始集结区域执行区域巡逻:
[0248][0249]
4.3.循环判断所有干扰机、歼击机群和轰炸群中每一架作战飞机所在位置与初始集结区域中心点的距离。
[0250][0251]
如果all_arrived_flag为true,则认为红方干扰机、歼击机群组成的混合编队已经全部到达初始集结区域,可以开始遂行作战任务
[0252]
5.干扰机开启干扰模式,即通过向干扰机下达指令make_disturb_areapatrol(2487,90,30
×
1000,30
×
1000,250,10800)开启红方干扰机区域干扰模式,其中2487为红方干扰机id、为红方干扰机巡逻区域中心点坐标,因作战任务设定红方干扰机作战任务为以自身为编队中心,利用其电子干扰能力掩护红方歼击机编队进攻,因此其执行区域干扰指令的区域中心点即为其实时地址,90指干扰机执行区域干扰指令所在区域长轴与正北方向的夹角;设定红方干扰机的干扰区域参数,包括干扰区域长度30km,干扰区域宽度30km;10800为干扰机干扰时,此处设为推演仿真全程时间。
[0253]
干扰机开启区域干扰任务后,推演仿真全程中干扰机处于开启干扰状态,处于干扰机干扰范围内的歼击机对蓝方预警探测装备不可见。
[0254]
干扰机、歼击机群组成混合编队,形成有利于红方执行对破击蓝方空中防御和夺取蓝方指挥所的编队队形。
[0255]
干扰机处于中心位置,歼击机分散方向部署于干扰机干扰范围靠外侧位置。歼击机处于干扰机干扰范围外沿,保证其在干扰机掩护之下对蓝方空中目标攻击射程最近,命中率更高。
[0256]
6.混合编队以干扰机、歼击机的最小速度前往作战任务设定的目标区域执行作战任务;
[0257]
6.1.干扰机执行区域巡逻指令make_disturb_areapatrol前往设定进攻准备点执行电子干扰任务。
[0258][0259]
其中2487为红方干扰机id、[-250830.54,409228.405]为红方干扰机编队进攻准备点位置,90为进攻准备点所在区域长轴与正北方向的夹角;设定红方干扰机的干扰区域参数,包括干扰区域长度100,干扰区域宽度100;10800为干扰机干扰时,此处设为推演仿真全程时间。
[0260]
6.2.循环干扰机混合编队中的所有歼击机执行区域巡逻指令make_disturb_areapatrol前往设定进攻准备点执行电子干扰任务。
[0261]
foraircraft_unitinour_air_team_units:
[0262][0263]
其中our_air_team_units,表示干扰机混合编队中的全部红方歼击机unit合集,aircraft_unit[
′
id']为遍历到的红方单架歼击机id、[-250830.54,409228.405]为红方干扰机编队进攻准备点位置,90为进攻准备点所在区域长轴与正北方向的夹角;设定红方歼击机到达进攻准备点执行区域巡逻的区域参数,包括区域长度100米,区域宽度100米;v
attack
=min(v
air
,v
jam
)为歼击机的巡逻速度,因歼击机处于干扰机编队之中,因此巡逻速度应以歼击机、干扰机三者之中最小的速度为准,为250m/s。10800为歼击机的区域巡逻时间,patrol_mode表示歼击机的巡逻模式,默认设为0代表普通模式。
[0264]
7.处理蓝方歼击机威胁:
[0265]
推演场景设定红方干扰机有效干扰范围半径为40km,蓝方歼击机与红方歼击机射程同为100km,由于红方歼击机位于干扰机有效干扰范围边缘位置对蓝方预警探测单元不可见,红方歼击机距蓝方歼击机的距离为dis
air.air
=dis
air.jam-r
jam
。红方歼击机在编队中处于干扰机有效干扰范围边缘均匀分布,可选距离最近的歼击机执行对蓝方空中单架歼击机攻击任务。
[0266]
仿真推演环境设定双方歼击中1枚导弹即可被摧毁,红方歼击机对空攻击range
pct
=90,以保证更高的命中率。此种情况下,当蓝方歼击机处于红方歼击机射程内时,红方干扰机仍在蓝方歼击机射程之外dis
air.air
<r
jam
∩dis
air.jam
>r
jam
,因此可保证红方干扰机的相对安全。
[0267]
8.处理蓝方干扰机编队威胁
[0268]
红方干扰机编队前往进攻准备点过程中,如果面临的蓝方干扰机编队威胁et
jam
大于设定的阈值,根据蓝方作战武器平台威胁建模可知,蓝方干扰机编队威胁较度更高,此时优先处理蓝方干扰机编队威胁,即et=et
jam
。
[0269]
红方干扰机作为掩护红方执行对蓝方空中重点目标攻击任务的重点作战资源,提
高其生存率将会极大有利于红方任务的成功率。加之蓝方干扰机的电子干扰作用致其干扰机编队中的歼击机不可见,故依托红方最近的驱逐舰our_ship_unit处理蓝方干扰机编队威胁。
[0270]
8.1.干扰机编队向红方驱逐舰方向主动规避。
[0271]
红方干扰机编队最近的红方驱逐舰的实时坐标为our_ship_unit[
′
pos
′
],当蓝方干扰机编队威胁存在时(et=et
jam and et≠0),红方干扰机编队中所有作战单元执行以驱逐舰实时坐标our_ship_unit[
′
pos
′
]的中心点的区域巡逻指令。
[0272]
8.1.1.干扰机执行区域巡逻指令make_disturb_areapatrol,开启电子干扰状态下前往驱逐舰实时坐标点。
[0273][0274]
其中2448为红方干扰机id、our_ship_unit[
′
pos']为红方驱逐舰实时坐标位置,90为驱逐舰实时坐标位置所在区域长轴与正北方向的夹角;设定红方干扰机的干扰区域参数,包括干扰区域长度length=300,干扰区域宽度width=300;disturb_time=10800为干扰机干扰时长,此处设为推演仿真全程时间。
[0275]
8.1.2.循环干扰机混合编队中的所有歼击机执行区域巡逻指令make_disturb_areapatrol前往驱逐舰实时坐标点。
[0276]
for aircraft_unitin our_air_team_units:
[0277][0278]
其中our_air_team_units,表示干扰机混合编队中的全部红方歼击机unit合集,aircraft_unit[
′
id
′
]为红方歼击机id、our_ship_unit[
′
pos
′
]为红方驱逐舰实时坐标位置,direction为驱逐舰实时坐标位置所在区域长轴与正北方向的夹角;设定红方歼击机到达进攻准备点执行区域巡逻的区域参数,包括区域长度length,区域宽度width;v
attack
=min(v
air
,v
jam
)为歼击机的巡逻速度,因歼击机处于干扰机编队之中,因此巡逻速度应以歼击机、干扰机三者之中最小的速度为准。patrol_time为歼击机的区域巡逻时间,patrol_mode表示歼击机的巡逻模式,默认设为0代表普通模式。
[0279]
8.2.干扰机接近红方驱逐舰实时坐标位置,依托驱逐舰前往进攻准备点。
[0280]
判断红方干扰机所在位置与红方驱逐舰实时位置的距离dis
our.jam.ship
,如果dis
our.jam.ship
<r
jam
,即红方干扰机与红方驱逐舰的距离小于干扰机的干扰范围,此时红方驱逐舰处于干扰机电子干扰掩护之下,驱逐舰对蓝方不可见。
[0281]
8.2.1.红方驱逐舰执行命令make_ship_areapatrol前往进攻准备点,
[0282][0283]
其中,our_ship_unit[
′
id
′
]为红方驱逐舰id、general_attack_point为红方干扰机编队进攻准备点位置,direction进攻准备点所在区域长轴与正北方向的夹角;设定红方歼击机到达进攻准备点执行区域巡逻的区域参数,包括区域长度length,区域宽度width;v
ship
为红方驱逐舰的航行速度,patrol_time为驱逐舰的区域巡逻时间,patrol_mode表示
驱逐舰的巡逻模式,默认设为0代表普通模式。
[0284]
8.2.2.干扰机执行区域巡逻指令make_disturb_areapatrol前往设定进攻准备点执行电子干扰任务。
[0285][0286]
其中v
ship
=30指干扰机的航行速度,此处依托驱逐舰的对空防护能力,故干扰机以驱逐舰的速度前往进攻准备点。
[0287]
8.2.3.循环干扰机混合编队中的所有歼击机执行区域巡逻指令make_disturb_areapatrol前往设定进攻准备点执行电子干扰任务。
[0288]
foraircraft_unitinour_air_team_units:
[0289][0290]
其中v
ship
指干扰机混合编队中的歼击机群的航行速度,此处依托驱逐舰的对空防护能力,故以驱逐舰的速度前往进攻准备点。
[0291]
按处理歼击机威胁胁方式寻歼蓝方空中作战力量;
[0292]
完成设定作战任务,返航机场
[0293]
(三)实验效果
[0294]
在案例中设定的典型空战仿真推演场景下,按设定的作战任务和作战计划,区分有/无蓝方威胁评估、有/无干扰机配合下的歼击机协同两两交叉共4组配置,每组配置进行仿真推演100次。
[0295]
试验中,本发明所提出的蓝方威胁评估模型,较为准确地评估我方干扰机混合编队所面临的蓝方空中歼击机和干扰机编队威胁,有助于提高威胁处理行动中的蓝方空中目标和红方兵力匹配度;基于行为树的干扰机编队空战协同作战行为可利用干扰机高效掩护歼击机达成作战效益的最大化,综合运用可有效提升红方干扰机的生存率和空战作战任务的完成率。
[0296]
在此条件下得出在100次仿真推演中红方干扰机的平均生存概率如图12所示,未采用蓝方空中威胁建模和干扰机配合下多机高效协同模型时,干扰机的生存率低至41%,仅采用蓝方威胁建模时干扰机生存率升至62%,仅采用干扰机掩护下协同时升至74%,而当同时采用蓝方威胁建模和干扰机掩护多机空战协同方法时,干扰机的生存率最高达到92%。可以看出,本发明提出的以蓝方威胁评估为前提的电子干扰掩护下的多机空战协同行为模拟方法,可以保证空战仿真推演过程中干扰机较高的生存率。
[0297]
在此条件下得出100次仿真推演中,红方干扰机混合编队作战任务的平均完成率如图13所示,不采用蓝方威胁建模和干扰机配合多机高效协同时,红方作战任务完成率低至17%,仅采用蓝方威胁建模时红方作战任务完成率升至45%,仅采用干扰机掩护下协同时升至67%,而当同时采用蓝方威胁建模和干扰机掩护多机协同方法时,干扰机的生存概念最高达到93%。可以看出,本发明提出的以蓝方威胁评估为前提的干扰机掩护下的多机空战协同行为模拟方法,可在保证仿真推演过程中干扰机重点作战单元生存率较高的前提下,极大提高作战任务完成率。
[0298]
因此,本发明具有如下的优点:
[0299]
1、提出的蓝方威胁评估模型,较为准确地评估我方干扰机混合编队所面临的蓝方空中歼击机和干扰机编队威胁,有助于提高威胁处理行动中的蓝方目标和红方兵力匹配度;
[0300]
2、建立基于行为树的干扰机编队多机空战协同作战行为,可高效利用干扰机的掩护能力,使得典型空战仿真推演空中混合编队中电子干扰机与歼击机群的高效协同,综合运用可有效提升红方干扰机的生存率和空中多机空战协同行为的完成率。
[0301]
进一步的,本发明还公开了一种存储介质,用于存储计算机可执行指令,其中,计算机可执行指令在被处理器执行时执行上述的电子干扰掩护下的多机空战协同行为模拟方法。
[0302]
显然,本领域技术人员应该明白,上述的本发明的各单元或各步骤可以用通用的计算装置来实现,它们可以集中在单个计算装置上,可选地,他们可以用计算机装置可执行的程序代码来实现,从而可以将它们存储在存储装置中由计算装置来执行,或者将它们分别制作成各个集成电路模块,或者将它们中的多个模块或步骤制作成单个集成电路模块来实现。这样,本发明不限制于任何特定的硬件和软件的结合。
[0303]
以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施方式仅限于此,对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单的推演或替换,都应当视为属于本发明由所提交的权利要求书确定保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
