1.本发明属于垃圾深度分选技术领域,具体涉及一种基于光谱识别技术的干垃圾深度分选方法与装置。
背景技术:
2.随着我国城市化进程的高速推进,垃圾围城的窘境日益严重。城市生活垃圾作为一种城市生态系统转化的副产物,具有种类多、总量大等特点,传统的垃圾处理方式一般为较为粗犷的焚烧发电和卫生填埋,具有二次污染和资源回收率低等缺点。为了提高生活垃圾的资源产出率,2018年,我国住房和城乡建设部提出将逐步建设生活垃圾源头分类“四分法”,将生活垃圾分为可回收物、厨余垃圾、有害垃圾、其他垃圾四大类,并分别进行减量化、无害化和资源化利用。源头分类后的其他垃圾,通常也称为干垃圾,占生活垃圾总量的30%以上,目前的处理方式仍为焚烧或填埋。然而,干垃圾中含有大量被污染的废纸张、废塑料、废橡胶、织物、木竹等多种有机组分,这些组分按照成分的不同可以分为纤维素及其衍生物、烯类聚合物等,并可以进一步通过不同的手段进行高值化利用,将这些组分分离出来对于进一步提高生活垃圾的资源产出率意义重大。
3.目前,我国城市生活垃圾源头分类仍处于试点阶段。因此,目前主流的垃圾分选技术依然是针对原生混合垃圾的机械分选,其原理是依据垃圾的基础属性进行分类,以机械化风选、塑料水选、金属磁选等技术为主,整体分选纯度在70~80%。然而,现有的垃圾分选技术并不适用于源头分类后的干垃圾深度分选。
4.光谱识别技术是分析物质成分的有力工具,广泛应用于食品、化工、现代医学等领域,具有所需样品量小、不破坏样品、快速、简便、精确度高等优点,在分类鉴别领域展现出了巨大潜力。现阶段,尚未见公开报道基于光谱识别的干垃圾深度分选技术。
技术实现要素:
5.本发明针对目前干垃圾深度分选领域技术手段的缺失、以及现有的垃圾分选技术并不适用于源头分类后的干垃圾深度分选,从而提出一种新型的对于干垃圾深度分选的技术方案;该方案对于垃圾分类具有重要意义,特别是对我国未来全面实行生活垃圾源头分类后的生活垃圾处理技术的发展奠定重要基础。
6.本发明通过以下技术手段解决上述技术问题:
7.一种基于光谱识别技术的干垃圾深度分选方法,该方法包括以下步骤:
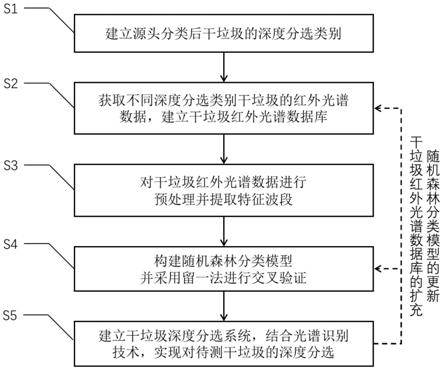
8.步骤一:建立源头分类后干垃圾的深度分选类别。
9.进一步地,所述步骤一中深度分选类别对应其组分特点及高值化利用方式分别为:
10.纤维素类:主要成分是纤维素及其衍生物,可经选择性催化热解制备高附加值化学品;
11.烯类聚合物类:多数为受污染的塑料或人造织物,具有耐腐蚀、难降解的特点,可
经催化热转化联产碳纳米管和富氢气体;
12.低值类:无机物含量相对较高,深度分选后无更多高值化利用方式。
13.步骤二:获取不同深度分选类别干垃圾的红外光谱数据,建立干垃圾红外光谱数据库。
14.进一步地,所述步骤二中的红外光谱数据为干垃圾在650~4000cm-1
波段的红外光谱数据。
15.步骤三:对干垃圾红外光谱数据进行预处理,并且提取特征波段,得到样本数据。
16.进一步地,所述步骤三中的预处理方式包括多元散射矫正、导数与平滑滤波联合处理和主成分分析法,进一步解释如下:
17.多元散射矫正:消除在干垃圾表面附着污染物颗粒大小、散射而产生的影响;
18.导数与平滑滤波联合处理:处理红外光谱数据中高频噪音和基线平移问题,提高光谱数据的灵敏度与分辨率;
19.主成分分析法:提取干垃圾红外光谱特征波段,提高后续分类模型的准确度与效率。
20.更进一步地,所述主成分分析法提取的特征波段包括:1100~1200cm-1
、1250~1350cm-1
、1600~1650cm-1
、2800~2900cm-1
及3250~3350cm-1
,分别对应了醚键和羟基中c=o键、不饱和c=c键、木质素组分苯环结构、甲基亚甲基c-h键及羟基及其形成的氢键所对应吸收峰。
21.步骤四:将步骤三所得样本数据,作为数据集训练随机森林分类模型,并采用留一法交叉验证,获得训练好的随机森林分类模型。
22.进一步地,所述步骤四中的随机森林分类模型的建立,包括生成100~1000棵决策树,并在干垃圾红外光谱数据内随机抽取5~20个变量,其中在所述步骤三中特征波段内的变量越多,所述决策树权重wi就越大。
23.更进一步地,随机森林分类模型的判别结果计算方式为:
[0024][0025]
其中,wi表示为每颗决策树的权重,hi(x)表示为每棵决策树的判别结果,t表示为决策树总量。
[0026]
进一步地,所述步骤四采用留一法交叉验证,具体实现过程为:
[0027][0028]
其中,n表示干垃圾红外光谱数据总量,表示n-1个训练集,yn表示1个验证集,表示,以n-1个数据作为训练集,1个数据作为验证集得到分类模型的验证结果。以上步骤循环n次,直到所有干垃圾的红外光谱数据进行过验证。最后,将验证结果取平均值作为分类模型的准确率鉴别标准。
[0029]
步骤五:建立一种待测干垃圾的深度分选方法。
[0030]
进一步地,利用光谱识别技术,获取待测干垃圾的红外光谱数据,在进行步骤三中相同的预处理后,将其输入步骤四所建的随机森林分类模型中,获得该待测干垃圾的深度分选类别。
[0031]
更进一步地,随机森林分类模型获得深度分选类别的方式为:
[0032]
结合随机森林分类模型中每棵决策树的计算结果,和该棵决策树在分类模型建立过程中所占的权重,获得该棵决策树的判别结果。综合每棵决策树的判别结果,获得该待测干垃圾的深度分选类别。最后,将待测干垃圾的光谱数据与深度分选类别补充加入干垃圾红外光谱数据库,用于数据库的扩充及模型的更新。
[0033]
进一步地,本发明还提供一种基于光谱识别技术的干垃圾深度分选装置,所述装置包括:
[0034]
运输装置:包括输送带、输送滚筒及变速齿轮箱,所述输送带底端还设有金属承重板,输送滚筒周围设有包胶;
[0035]
分拣装置:包括二维线性滑台模组,红外光谱识别模块及串口通信通信模块。所述二维线性滑台模组包括水平滑台及竖直滑台;所述的水平滑台,底端通过滑台底部设置的滑台支架与所述分拣装置顶端相互连接固定;所述的竖直滑台,底端均匀分布大量柔性刷毛;
[0036]
收集装置:包括两侧传输滑道及末端传输滑道;
[0037]
中枢控制装置:通过串口通信实现对红外光谱识别模块及二维线性滑台模组的调控,通过无线通信模块实现云端数据的实时接收与更新。
[0038]
本发明的优点在于:建立了一种基于光谱识别技术的干垃圾深度分选方法以及实现该方法的干垃圾深度分选装置,同时实现干垃圾红外光谱数据库数据的不断扩充及分类鉴别模型的定期更新;本发明可使源头分类后的干垃圾被更有效的利用和处理,进一步提高生活垃圾的资源产出率。
附图说明
[0039]
图1为本发明公开的一种基于光谱识别技术的干垃圾深度分选方法流程图。
[0040]
图2为本发明公开的一种基于光谱识别技术的干垃圾深度分选装置的工作流程示意图。
具体实施方式
[0041]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例,对本发明的技术方案进行进一步的详细说明。本发明的示意性实施方式及其说明仅用于解释本发明的技术方案,而不作为对本发明的限定。
[0042]
实施例1:如图1所示,一种基于光谱识别技术的干垃圾深度分选方法,所述方法包括:
[0043]
s1:建立源头分类后干垃圾的深度分选类别。具体过程为:根据干垃圾的组分特点与高值化利用方向,将源头分类后的干垃圾分为:纤维素类、烯类聚合物、低值类。
[0044]
s2:大量获取不同深度分选类别干垃圾的红外光谱数据,建立干垃圾红外光谱数据库。具体过程为:收集大量经过源头分类后的干垃圾,并使用红外光谱仪采集干垃圾样本在650~4000cm-1
波段的光谱数据,得到红外光谱数据矩阵xm×n,其中m=72表示干垃圾总数,n=3351表示为对应波段的红外光谱数据。最后将干垃圾红外光谱数据和深度分选类别保存至云端,建立干垃圾红外光谱数据库。
[0045]
s3:对干垃圾红外光谱数据进行预处理并提取特征波段。具体过程为:对干垃圾红外光谱数据矩阵xm×n进行多元散射矫正、导数与平滑滤波联合处理、主成分分析法。根据公式进行多元散射校正,其中ai=mia bi,为平均光谱的一元线性回归矩阵;根据公式进行导数与平滑滤波联合处理,其中f(i)=a0 a1i a2i2 a3i3,为平滑滤波器的构造抛物线;根据公式zi=a1x1 a2x2
…
akxkzi和计算不同波段光谱数据贡献率,用以特征波段的选取。最终得到对应醚键和羟基中c=o键、不饱和c=c键、木质素组分苯环结构、甲基亚甲基c-h键以及羟基及其形成的氢键吸收峰的波段1100~1200cm-1
、1250~1350cm-1
、1600~1650cm-1
、2800~2900cm-1
及3250~3350cm-1
为特征波段。
[0046]
s4:构建随机森林分类模型并采用留一法进行交叉验证。具体过程为:构建含有500棵决策树的随机森林分类模型,每颗决策树包括干垃圾红外光谱数据内的10个随机抽取的变量。根据公式获得随机森林的判别结果,其中,hi(x)表示为每棵决策树的判别结果,t表示为决策树总量,wi表示为每颗决策树的权重。决策树所包含的变量在特征波段内的越多,该颗决策树权重wi就越大。随后,对随机森林分类模型采用留一法进行交叉验证,以n-1个数据作为训练集,1个数据作为验证集,用于验证分类模型的准确率。以上步骤循环n次,直到所有干垃圾的红外光谱数据进行过验证。根据公式率。以上步骤循环n次,直到所有干垃圾的红外光谱数据进行过验证。根据公式计算模型最终准确率,其中n表示干垃圾红外光谱数据总量,表示n-1个训练集,yn表示1个验证集。表示验证结果,最后将验证结果取平均值作为分类模型的准确率鉴别标准。最终计算该模型分类鉴别准确率为84.4%。
[0047]
实施例2:采用实施例1中预处理后的干垃圾红外光谱数据,构建含有500颗决策树的随机森林分类模型,每颗决策树包括干垃圾红外光谱数据内的5个随机抽取的变量。根据公式获得随机森林的判别结果,随后采用留一法交叉验证公式获得随机森林的判别结果,随后采用留一法交叉验证公式计算模型最终准确率,计算得知该模型分类鉴别准确率为81.6%。
[0048]
实施例3:采用实施例1中预处理后的干垃圾红外光谱数据,构建含有500颗决策树的随机森林分类模型,每颗决策树包括干垃圾红外光谱数据内的15个随机抽取的变量。根据公式获得随机森林的判别结果,随后采用留一法交叉验证公式计算模型最终准确率,计算得知该模型分类鉴别准确率为83.1%。
[0049]
实施例4:采用实施例1中预处理后的干垃圾红外光谱数据,构建含有500颗决策树的随机森林分类模型,每颗决策树包括干垃圾红外光谱数据内的20个随机抽取的变量。根据公式获得随机森林的判别结果,随后采用留一法交叉验证公式计算模型最终准确率,计算得知该模型分类鉴别准确
率为83.9%。
[0050]
实施例5:采用实施例1中预处理后的干垃圾红外光谱数据,构建含有100颗决策树的随机森林分类模型,每颗决策树包括干垃圾红外光谱数据内的10个随机抽取的变量。根据公式获得随机森林的判别结果,随后采用留一法交叉验证公式计算模型最终准确率,计算得知该模型分类鉴别准确率为80.3%。
[0051]
实施例6:采用实施例1中预处理后的干垃圾红外光谱数据,构建含有1000颗决策树的随机森林分类模型,每颗决策树包括干垃圾红外光谱数据内的10个随机抽取的变量。根据公式获得随机森林的判别结果,随后采用留一法交叉验证公式计算模型最终准确率,计算得知该模型分类鉴别准确率为82.7%。
[0052]
实施例7:如图2所示,本发明提供的一种基于光谱识别技术的干垃圾深度分选装置,该装置包括:
[0053]
运输装置:运输装置包括输送带、输送滚筒及变速齿轮箱;输送带底端还安装有金属承重板,输送滚筒周围进行包胶以防止打滑,输送带与变速齿轮箱的运输速度设置为0.05~0.15m/s;将源头分类后的干垃圾,经过破袋、均匀等预处理后,通过运输装置,送至分拣装的红外光谱识别区域,进行红外光谱数据采集与深度分选。
[0054]
分拣装置:分拣装置包括红外光谱识别模块以及二维线性滑台模组;红外光谱识别模块由红外光谱仪以及外接光纤探头组合而成。获得干垃圾样本在650~4000cm-1
波段的光谱数据;二维线性滑台模组包括水平滑台及竖直滑台,单个滑台由同步带、同步带固定块及驱动电机组成;水平滑台同步带的运动速度为0.15m/s,竖直滑台通过同步带固定块连接柔性毛刷支架,均匀分布大量柔性刷毛,运动速度为0.2m/s。
[0055]
收集装置:收集装置包括两侧传输滑道及末端传输滑道,其中,传输滑道与分选产物之间的对应关系为:纤维素类,对应从左侧传输滑道获得的干垃圾;烯类聚合物类,对应从右侧传输滑道获得的干垃圾;低值类,对应从末端传输滑道获得的干垃圾。
[0056]
中枢控制装置:中枢控制装置搭载微型计算机,通过串口通信得到红外光谱识别模块获得的光谱数据,依次进行多元散射矫正、导数与平滑滤波联合处理、主成分分析,然后在训练好的随机森林分类模型中进行分类鉴别:结合随机森林分类模型中每棵决策树的计算结果,和该棵决策树在分类模型建立过程中所占的权重,获得该棵决策树的判别结果。综合每棵决策树的判别结果,获得该对象的深度分选类别。最后,将干垃圾对象的光谱数据与深度分选类别补充加入干垃圾红外光谱数据库,用于数据库的扩充及模型的更新,以提高下一次分类鉴别的准确率。
[0057]
通过以上技术方案,本发明可以实现对源头分类后的干垃圾进行深度分选,将其分选为纤维素类、烯类聚合物类及低值类,深度分选后的干垃圾可以作为生物质资源高值化利用,以提高生活垃圾的资源利用率。
[0058]
需要说明的是,以上实施例仅用以说明本发明的技术方案,而非对其限制,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者
对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。