1.本发明涉及协作机器人力位混合控制。
背景技术:
2.协作机器人常用于需要与人或环境互动的工作场景,在与人或环境互动的过程中,需要对协作机器人进行力位混合控制。协作机器人系统具有强非线性、强耦合、时变等特点,获得其精确模型成本较高。实际工程应用中,外部扰动不可避免,因此有必要提高协作机器人的鲁棒性。
技术实现要素:
3.本发明提供一种基于滑模控制的协作机器人力位混合迭代学习控制方法及系统,提高了协作机器人力与位置轨迹跟踪精度,以及对外部扰动的抗干扰性能。
4.根据本发明实施例的第一方面,提供一种协作机器人控制方法,包括以下步骤:
5.建立n自由度协作机器人关节空间动力学模型;
6.将建立的关节空间动力学模型转换到任务空间动力学模型;
7.建立力控制方向与位置控制方向选择矩阵s与其中i表示单位矩阵;
8.根据力控制方向与位置控制方向选择矩阵建立位置跟踪误差与力跟踪误差的表达式,并根据该表达式建立滑模控制器的滑模面;
9.根据滑模面,结合建立的协作机器人任务空间动力学模型,推导出协作机器人的基于滑模控制的力位混合迭代学习控制率,实现在一些方向上的位置控制的同时,在另外一些方向上实现力的控制。
10.根据本发明实施例的第二方面,提供一种协作机器人力位混合控制系统,包括:
11.处理器;
12.用于存储处理器可执行指令的存储器;
13.其中,所述处理器被配置为执行所述方法的全部或部分步骤。
14.根据本发明实施例的第三方面,提供一种非临时性计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现所述方法的全部或部分步骤。
15.总体而言,通过本发明所构思的以上技术方案与现有技术相比,本发明提供的用于协作机器人的基于滑模控制的力位混合迭代学习控制方法主要具有以下有益效果:
16.1)使用迭代学习控制方法,提高重复运动控制力与位置轨迹跟踪精度。
17.2)结合滑模控制方法,可以提高对外部扰动的鲁棒性。
附图说明
18.为了更清楚地说明本发明实施例的技术方案,下面将对实施例的附图作简单地介绍。
19.图1为本发明一实施例提供的用于协作机器人的基于滑模控制的力位混合迭代学
习控制方法流程图。
20.图2为本发明一实施例提供的2自由度机器人简图。
21.图3为本发明一实施例的理想轨迹示意图。
22.图4为本发明基于滑模控制的力位混合迭代学习控制方法、传统滑模控制(c1)、传统迭代学习(c2)轨迹跟踪误差二范数。
23.图5为本发明基于滑模控制的力位混合迭代学习控制方法、传统滑模控制(c1)、传统迭代学习(c2)对扰动的抑制性能。
具体实施方式
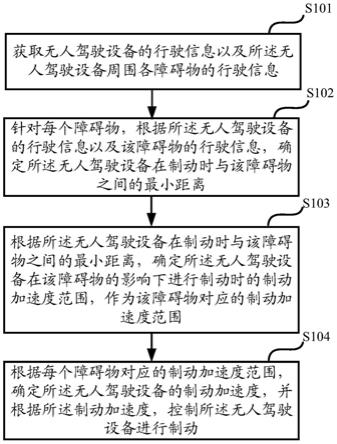
24.图1示出了一种基于滑模控制的协作机器人力位混合迭代学习控制方法流程图。下面结合图1对本发明进行详细说明。
25.步骤1,建立n自由度机器人关节空间动力学模型;
26.步骤2,将步骤1中建立的关节空间动力学模型转换到任务空间动力学模型;
27.步骤3,建立力控制方向与位置控制方向选择矩阵s与其中
28.步骤4,建立位置跟踪误差与力跟踪误差的表达式,根据建立的位置跟踪误差与力跟踪误差的表达式建立滑模控制器的滑模面;
29.步骤5,根据滑模面,结合n自由度机器人任务空间动力学模型,推导出协作机器人的基于滑模控制的力位混合迭代学习控制率;
30.步骤6,根据传感器实时采集到的机器人输出的位置误差和力误差,使用推导出的控制率计算出所需的驱动力矩,实现对机器人的位置和力的控制。
31.迭代学习控制作为一种数据驱动的控制方法,不需要已知被控系统的动力学模型,非常适合协作机器人的控制。且迭代学习控制通过使用上一次迭代的输入输出数据,可以不断提高其控制精度,是取得良好的力位混合控制效果的有效途径。滑模控制可以有效实现控制器的鲁棒性,然而常规的滑模控制需要已知被控对象模型,本发明将常规滑模控制结合到迭代学习控制器中实现不需要被控对象系统模型,提高了协作机器人力与位置轨迹跟踪精度,以及对外部扰动的抗干扰性能。
32.以某2自由度机器人为例,如图2所示。各杆件的质量分别为m1、m2,杆件长度分别为l1、l2,质心位置到杆件首端距离分别为l
c1
、l
c2
,这些参数具体数值如图2所示,各杆件相对质心的转动惯量为i1=i2=0.1kg
·
m2。该实施例中,在x方向进行位置控制,在y方向进行力控制。
33.步骤1中建立二自由度机器人关节空间动力学模型如下:
[0034][0035]
其中:q、分别为关节角度、角速度以及角加速度;τ、τv分别为关节力矩、关节外部扰动力矩;dq、cq、gq分别是协作机器人的惯性矩阵、向心科里奥利矩阵以及重力矩阵。
[0036]
式(1)中:
[0037][0038]
其中:
[0039][0040]
式中,q1、q2分别为两个关节的转角,分别为两个关节的转角的导数。
[0041]
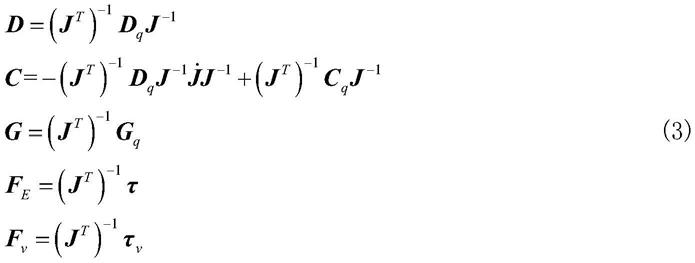
步骤2中任务空间动力学模型为:
[0042][0043]
其中:分别为末端执行器速度以及加速度;fe、fv分别为末端执行点输出力与扰动力,d、c、g分别为协作机器人的惯性矩阵、向心科里奥利矩阵以及重力矩阵在任务空间中的表示。d、c、g、fe、fv的表达式为:
[0044][0045]
步骤3中,由于该实施例中在x方向进行位置控制,y方向进行力控制,选择矩阵s与为:
[0046]
[0047][0048]
可以看出选择矩阵s与均为对角矩阵,且对应方向上为力控制时值为1,对应方向上为位置控制时值为0。
[0049]
步骤3中位置跟踪误差e
p
(t)与力跟踪误差ef(t)可表示为:
[0050][0051]ef
(t)=s(fd(t)-f(t)),
ꢀꢀ
(9)
[0052]
其中:pd(t)、p(t)分别表示理想位置与实际位置,fd(t)、f(t)分别表示机器人末端执行点与环境之间的理想力与实际力。
[0053]
步骤4中滑模控制器的滑模面定义为:
[0054][0055]
其中:系数λ
p
、λ
f1
、λ
f2
均为对角矩阵,分别为位置跟踪误差与力跟踪误差的导数。
[0056]
本实施例中,
[0057][0058]
步骤5中建立如下的力位混合迭代学习控制率:
[0059][0060]
其中:j表示迭代次数,k为比例增益矩阵,γ为参数学习增益,fj为第j次迭代中与环境之间的交互力,为学习矩阵,φj为一个已知矩阵,σj为第j次迭代中的滑模面,α为滑模项的切换增益,后续所有带下标j的参数均表示该参数在第j次迭代中的表示。
[0061]
矩阵φj的表达式为:
[0062][0063]
其中,n为机器人关节数量,其中,n为机器人关节数量,分别是第j次迭代中的位置跟踪误差一阶导数、力跟踪误差一阶导数和力跟踪误差二阶导
数,为理想位置的二阶导数,为第j次迭代中实际位置的二阶导数,1为合适维度的全1矩阵,ψj中所有参数均可通过协作机器人中传感器测量获得,因此为一个已知矩阵。
[0064]
学习矩阵为θ的估计值,θ中包含协作机器人的惯性矩阵、向心科里奥利矩阵以及重力矩阵d、c、g,定义矩阵ξ:
[0065]
ξ=[d c g]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(14)
[0066]
θ的表达式为:
[0067][0068]
公式(14)中ξi(i=1,
…
n)为ξ的第i列。
[0069]
本实施例中,
[0070][0071]
将本发明提供的方法(c3)所获得的轨迹跟踪精度和对外部扰动的抑制作用与其他的算法进行比较,分别与传统滑模控制(c1)、传统迭代学习(c2)进行对比。
[0072]
仿真中使用的理想轨迹如图3所示。
[0073]
轨迹跟踪精度结果如图4所示,从图4可以看出,c3比其他方法的跟踪误差二范数在收敛后最小,因此比c1和c2可以实现更好的位置与力跟踪性能。
[0074]
对外部扰动的抑制作用对比结果如图5所示,图中显示了c1和c3两种方法的两个轴的控制输入力,从图5可以看出,c3比c1的控制输入力曲线更平滑,实现了对外部扰动的有效抑制。
[0075]
对其他自由度的机器人,只需调整式(6)到式(16)中各向量和矩阵的维度即可。
[0076]
本发明的有益效果是:该方法提高了机器人的力位轨迹跟踪精度,且提高了传统滑模控制对外部扰动的抑制能力,有利于在实际应用中推广使用。
[0077]
在示例性实施例中,还提供一种协作机器人,包括:处理器;用于存储处理器可执行指令的存储器;其中,所述处理器被配置为执行存储器中的指令,以完成上述的方法的全部或部分步骤。
[0078]
在示例性实施例中,还提供了一种包括指令的非临时性计算机可读存储介质,例如包括指令的存储器,上述指令可由处理器执行以完成上述的方法的全部或部分步骤。例如,所述非临时性计算机可读存储介质可以是rom、ram、cd-rom、磁带、软盘和光数据存储设备等。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。