一种基于bim的测绘地形的方法
技术领域
1.本发明涉及测绘地形的方法技术领域,尤其涉及一种基于bim的测绘地形的方法。
背景技术:
2.无人驾驶飞机简称“无人机”,英文缩写为“uav”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作。
3.基于bim的测绘地形的方法技术是autodesk公司在2002年率先提出,目前已经在全球范围内得到业界的广泛认可,它可以帮助实现建筑信息的集成,从建筑的设计、施工、运行直至建筑全寿命周期的终结,各种信息始终整合于一个三维模型信息数据库中,设计团队、施工单位、设施运营部门和业主等各方人员可以基于基于bim的测绘地形的方法进行协同工作,有效提高工作效率、节省资源、降低成本、以实现可持续发展。
4.测绘就是测量和绘图,以计算机技术、光电技术、网络通讯技术、空间科学、信息科学为基础,以全球导航卫星定位系统(gnss)、遥感(rs)、地理信息系统(gis)为技术核心,将地面已有的特征点和界线通过测量手段获得反映地面现状的图形和位置信息,供工程建设的规划设计和行政管理之用,测量放样作为一项测绘技术来说,就是对任一空间物体的三维定位测量,它的具体工作,均反映在对距离、角度(方向)、高程三个量的测定上,不论采用什么样的方法放样,总是离不开运用各类不同的仪具将这三个量测量的结果,在施工现场予以标定。放样是工程测量研究的主要内容之一,在测绘过程中,有时为了保证测绘效率,需要使用无人机携带测绘机构进行测绘操作。
5.现有技术中,仅以多次横向或纵向的移动方式作为无人机的测绘轨迹,由于无人机的测绘范围为扇形,因此局部区域被多次测绘,增加了测绘操作的用时,降低工作效率的同时给使用者的使用带来不便。
技术实现要素:
6.针对上述问题,本发明旨在解决上面描述的问题。本发明的一个目的是提供解决以上问题中的一种基于bim的测绘地形的方法。
7.一种基于bim的测绘地形的方法,可以包括:
8.s1、数据准备:规划并确定检测区域,将无人机及摄影机与控制中心无线连接;
9.s2、影像获取:根据相关航线要求,控制无人机飞行,并通过驱动电机改变摄影机摄像头位置,获得多次测量摄影影像;
10.s3、数据处理,将摄影机获取摄影影像传输至控制中心,进行综合分析,并得出测绘目标的三维立体图形。
11.本技术基于bim的测绘地形的方法在同一位置,通过驱动电机21旋转摄像机摄像头角度,即可全方位的或者图像信息,避免多次无效信息的累加,提高数据获取的精确度,减少获取图像的时间,提高工作效率。
12.优选地,s2包括通过驱动电机等角度多次旋转摄像头角度,并依次获取任一次旋
转角度后的摄影影像。
13.本技术基于bim的测绘地形的方法在数据处理时候,将上一次的数据,和下一次获得重复数据进行重叠叠加,能够获得360度无死角的地形图像信息。测量精度高,无误差。
14.优选地,无人机包括无人机主体和固设在无人机主体底侧摄影机;基于bim的测绘地形的方法还包括缓冲组件,缓冲组件对称设置在摄影机顶侧和底侧,任一缓冲组件包括弧形固定板,和设置在两固定板之间的均匀排布第一缓冲弹簧,两固定板平行设置;基于bim的测绘地形的方法还包括驱动电机,驱动电机通过支架固设在固定板底侧,输出端的转轴穿过固定板,与摄影机固定连接。
15.本技术基于bim的测绘地形的方法在通过驱动电机带动摄影机旋转,由于弧形固定板几乎包裹摄影机,且通过第一缓冲弹簧的缓冲减震作用,在旋转摄影机过程中,位置偏离误差小,测量精度高。
16.优选地,无人机主体包括支撑杆,包括多个,多个支撑杆固设在无人机主体顶侧,呈伞形结构,覆盖无人机主体的螺旋桨;基于bim的测绘地形的方法还包括充气气囊,充气气囊设置在多个支撑杆之间,当有需要充气,无人机主体上的气体发生器对充气气囊充气。
17.本技术基于bim的测绘地形的方法通过气体发生器对充气气囊充气,然后充气气囊覆盖无人机顶侧,类似一个雨伞,能够避免雨雪直接流入无人机螺旋桨、摄像头上,提高测量的稳定性和测量的精度。
18.优选地,充气气囊充的是热空气。
19.其中,本技术基于bim的测绘地形的方法通过热空气能够减少螺旋桨的动力输出。
20.优选地,充气气囊充的是氢气。
21.本技术基于bim的测绘地形的方法通过氢气能够减少螺旋桨的动力输出。
22.优选地,基于bim的测绘地形的方法还包括配重球,配重球滑动设置在支撑杆上。
23.本技术基于bim的测绘地形的方法通过设置配重球,当气囊排气以后,配重球沿着支撑杆滑下,能够将气囊收起,不会对后续无人机的移动产生干扰。
24.优选地,任一支撑杆上包括两个配重球,两配重球之间设置有第二缓冲弹簧。
25.本技术基于bim的测绘地形的方法当气囊被充气,通过配重球作用于缓冲弹簧,避免气囊突然充气的振动,提高装置的稳定性。
26.优选地,气体发生器设置在无人机主体底侧,包括气腔,和设置在气腔底侧均风管,均风管呈倒漏斗状结构,套设在摄影机外侧。
27.本技术基于bim的测绘地形的方法通过气腔和设置在气腔底侧均风管通过气体发生器对均风管输气,使得摄影机外侧形成一层均匀气墙,避免雨水作用于摄像头,提高测量精度、稳定性。
28.本发明基于bim的测绘地形的方法具有以下技术效果:
29.本技术基于bim的测绘地形的方法在同一位置,通过驱动电机旋转摄像机摄像头角度,即可全方位的或者图像信息,避免多次无效信息的累加,提高数据获取的精确度,减少获取图像的时间,提高工作效率。当遇到雨雪天气,需要测量时候,通过气体发生器对充气气囊充气,然后充气气囊覆盖无人机顶侧,类似一个雨伞,能够避免雨雪直接流入无人机螺旋桨、摄像头上,提高测量的稳定性和测量的精度。气体发生器对均风管输气,使得摄影机外侧形成一层均匀气墙,避免雨水作用于摄像头,提高测量精度、稳定性。
30.参照附图来阅读对于示例性实施例的以下描述,本发明的其他特性特征和优点将变得清晰。
附图说明
31.并入到说明书中并且构成说明书的一部分的附图示出了本发明的实施例,并且与描述一起用于解释本发明的原理。在这些附图中,类似的附图标记用于表示类似的要素。下面描述中的附图是本发明的一些实施例,而不是全部实施例。对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,可以根据这些附图获得其他的附图。
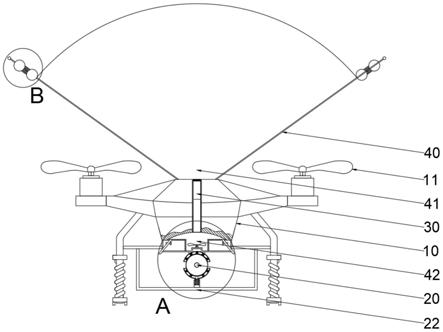
32.图1示例性地示出了本发明基于bim的测绘地形无人机结构图;
33.图2示例性地示出了本发明基于bim的测绘地形无人机a位置放大图;
34.图3示例性地示出了本发明基于bim的测绘地形无人机b位置放大图;
35.图中:10、无人机主体;20、摄影机;30、缓冲组件;31、固定板;32、第一缓冲弹簧;21、驱动电机;22、支架;23、转轴;40、支撑杆;11、螺旋桨;41、充气气囊;42、气体发生器;43、配重球;44、第二缓冲弹簧;45、气腔;46、均风管。
具体实施方式
36.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互任意组合。
37.下面结合附图及实施例,详细说明该基于bim的测绘地形的方法。
38.实施例1
39.如图1-3所示,本发明的一个目的是提供一种基于bim的测绘地形的方法,可以包括:
40.s1、数据准备:规划并确定检测区域,将无人机及摄影机20与控制中心无线连接;
41.s2、影像获取:根据相关航线要求,控制无人机飞行,并通过驱动电机21改变摄影机20摄像头位置,获得多次测量摄影影像;
42.s3、数据处理,将摄影机20获取摄影影像传输至控制中心,进行综合分析,并得出测绘目标的三维立体图形。
43.其中,本技术基于bim的测绘地形的方法在同一位置,通过驱动电机21旋转摄像机摄像头角度,即可全方位的或者图像信息,避免多次无效信息的累加,提高数据获取的精确度,减少获取图像的时间,提高工作效率。
44.实施例2
45.在一个优选实施例中,s2包括通过驱动电机21等角度多次旋转摄像头角度,并依次获取任一次旋转角度后的摄影影像。
46.其中,本技术基于bim的测绘地形的方法将摄像头旋转45度,获取一次数据,一共旋转八次摄像头。
47.其中,本技术基于bim的测绘地形的方法在数据处理时候,将上一次的数据,和下
一次获得重复数据进行重叠叠加,能够获得360度无死角的地形图像信息。测量精度高,无误差。
48.实施例3
49.在另一个优选实施例中,无人机包括无人机主体10和固设在无人机主体10底侧摄影机20;
50.基于bim的测绘地形的方法还包括缓冲组件30,缓冲组件30对称设置在摄影机20顶侧和底侧,任一缓冲组件30包括弧形固定板31,和设置在两固定板31之间的均匀排布第一缓冲弹簧32,两固定板31平行设置;基于bim的测绘地形的方法还包括驱动电机21,驱动电机21通过支架22固设在固定板31底侧,输出端的转轴23穿过固定板31,与摄影机20固定连接。
51.其中,本技术基于bim的测绘地形的方法在通过驱动电机21带动摄影机20旋转,由于弧形固定板31几乎包裹摄影机20,且通过第一缓冲弹簧32的缓冲减震作用,在旋转摄影机20过程中,位置偏离误差小,测量精度高。
52.实施例4
53.在又一个优选实施例中,无人机主体10包括支撑杆40,包括多个,多个支撑杆40固设在无人机主体10顶侧,呈伞形结构,覆盖无人机主体10的螺旋桨11;基于bim的测绘地形的方法还包括充气气囊41,充气气囊41设置在多个支撑杆40之间,当有需要充气,无人机主体10上的气体发生器42对充气气囊41充气。
54.其中,当遇到雨雪天气,需要测量时候,雨雪的存在打到无人机的螺旋桨上会影响螺旋桨正常的工作,同时雨水流到摄像头上会直接影响测量。
55.本技术基于bim的测绘地形的方法通过气体发生器42对充气气囊41充气,然后充气气囊41覆盖无人机顶侧,类似一个雨伞,能够避免雨雪直接流入无人机螺旋桨、摄像头上提高测量的稳定性和测量的精度。
56.其中,气体发生器可以为风机、和加热器组合结构,通过无人机主体的气体通道输入气囊。
57.其中,气体发生器可以为化学反应产生,例如叠氮化钠。具体方程式为:
58.10nan3 2kno3 sio2
→
5na2o
·
k2o
·
5sio2 16n2
59.其中,叠氮化钠产生气体的工作原理,类使于汽车安全气囊。
60.其中,气体通道上可以设置有电阀门,当气囊被充满,关闭电阀门即可。
61.其中,气囊的设计并不会增加太多无人机的负担。
62.实施例5
63.在实际使用的时候,充气气囊41充的是热空气。
64.其中,本技术基于bim的测绘地形的方法通过热空气能够减少螺旋桨的动力输出。
65.实施例6
66.在实际使用的时候,充气气囊41充的是氢气。
67.其中,本技术基于bim的测绘地形的方法通过氢气能够减少螺旋桨的动力输出。
68.实施例7
69.在还一个优选实施例中,基于bim的测绘地形的方法还包括配重球43,配重球43滑动设置在支撑杆40上。
70.其中,本技术基于bim的测绘地形的方法通过设置配重球43,当气囊排气以后,配重球43沿着支撑杆40滑下,能够将气囊收起,不会对后续无人机的移动产生干扰。
71.实施例8
72.具体来说,任一支撑杆40上包括两个配重球43,两配重球43之间设置有第二缓冲弹簧44。
73.其中,本技术基于bim的测绘地形的方法当气囊被充气,通过配重球作用于缓冲弹簧,避免气囊突然充气的振动,提高装置的稳定性。
74.实施例9
75.优选地,气体发生器42设置在无人机主体10底侧,包括气腔45,和设置在气腔45底侧均风管46,均风管46呈倒漏斗状结构,套设在摄影机20外侧。
76.其中,本技术基于bim的测绘地形的方法通过气腔45和设置在气腔45底侧均风管46通过气体发生器对均风管46输气,使得摄影机20外侧形成一层均匀气墙,避免雨水作用于摄像头,提高测量精度、稳定性。
77.本技术基于bim的测绘地形的方法工作原理:
78.本技术基于bim的测绘地形的方法在同一位置,通过驱动电机21旋转摄像机摄像头角度,即可全方位的或者图像信息,避免多次无效信息的累加,提高数据获取的精确度,减少获取图像的时间,提高工作效率。当遇到雨雪天气,需要测量时候,通过气体发生器42对充气气囊41充气,然后充气气囊41覆盖无人机顶侧,类似一个雨伞,能够避免雨雪直接流入无人机螺旋桨、摄像头上提高测量的稳定性和测量的精度。气体发生器对均风管46输气,使得摄影机20外侧形成一层均匀气墙,避免雨水作用于摄像头,提高测量精度、稳定性。
79.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括
……”
限定的要素,并不排除在包括要素的物品或者设备中还存在另外的相同要素。
80.以上实施例仅用以说明本发明的技术方案而非限制,仅仅参照较佳实施例对本发明进行了详细说明。本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的精神和范围,均应涵盖在本发明的权利要求范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。