技术特征:
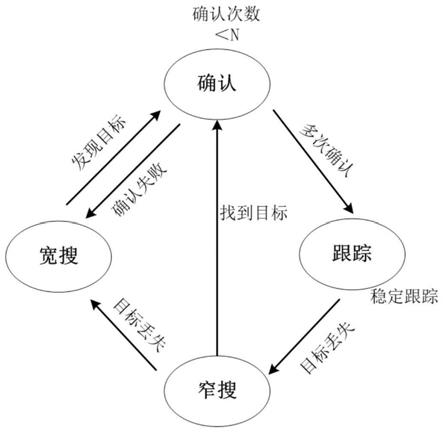
1.一种天基信息时效性与精确制导参数的匹配性分析方法,包括以下步骤:a、利用天基传感器获取目标信息;b、进行精确制导末段探测并设置末段探测系统参数;c、计算精确制导捕获目标的概率。2.根据权利要求1所述的方法,其特征在于,在所述步骤(a)中,利用星上传感器获取目标位置和图像信息;还利用星上传感器获取处理时效。3.根据权利要求1所述的方法,其特征在于,在所述步骤(b)中,精确制导末段探测包括:在指定区域进行目标信息的宽幅搜索,若发现该宽幅区域存在需要查找的目标,则进行一定次数的确认;若确认成功则对目标进行跟踪,否则继续进行宽幅搜索;若跟踪的目标丢失则进行窄幅搜索,若重新找到目标则再次进行确认,否则进行宽幅搜索。4.根据权利要求3所述的方法,其特征在于,所检测到的目标参数传送给伺服控制模块用于导引飞行命令的生成。5.根据权利要求1所述的方法,其特征在于,在所述步骤(b)中,设置末段探测系统参数包括:获取飞行器末段探测系统运行预定的参数,并对参数进行初始化;设定天线的初始波位和指向,按照扫描步进搜索指定空域,并判断是否有目标出现;若有目标出现则建立目标航迹并进行稳定跟踪,并不断判断飞行器与目标之间的径向距离。6.根据权利要求1所述的方法,其特征在于,在所述步骤(c)中,在飞行器发射前,所搭载的地面平台自动向飞行器封装天基传感器获取目标现在点位置;飞行器在搭载平台上完成飞行诸元装订后瞄准目标现在点飞行,并使末段探测的搜索范围覆盖目标散布域;目标散布域由飞行器发射前搭载平台的定位误差以及飞行过程中惯导误差的综合影响合成。7.根据权利要求6所述的方法,其特征在于,在所述步骤(c)中,分析精确制导飞行器自控终点散布误差;飞行器自控终点散布误差与传感器系统误差、海上运动目标逃逸误差、发射平台自身的定位误差和飞行器导航误差相关;传感器系统误差δ
系统
误差包括传感器对目标的探测误差δ
探测
和传感器搭载探测平台的定位误差δ
定位
,计算公式为:目标逃逸误差δ
逃逸
包括传感器获取目标信息在一定时效内的目标运动逃逸误差和飞行器自控飞行时间内的目标运动逃逸误差;精确制导飞行器采用现在点装订方式,使之瞄准目标现在点m0位置,目标采用任意方向机动,目标实际位置点m
t
偏离现在点m0,构成由目标机动产生的误差;
目标机动误差δ
目标
的计算公式为:δ
目标
=v
m
·
(t
zk
t
延迟
);其中,v
m
为目标机动速度,单位为m/s,按最大速度取值;t
zk
为导弹自控飞行时间;t
延迟
为目标指示延迟时间;目标机动误差包括横向和纵向误差,分别为:δ
mh
=v
mh
·
(t
zk
t
延迟
);δ
mx
=v
mx
·
(t
zk
t
延迟
);其中,δ
mh
、δ
mx
分别为飞行器自控飞行时间内的目标横移量、距变量;v
mh
、v
mx
分别为目标横移率、距变率,单位为m/s;t
zk
为飞行器自控飞行时间;t
延迟
为时间延迟;设目标航向与飞行器飞行方向垂直,则目标机动逃逸误差为横向误差δ
目标
=δ
mh
=v
mh
·
(t
zk
t
延迟
);设飞行器搭载平台的定位最大误差为δ
平台
,飞行器惯导误差为δ
惯导
;则精确制导飞行器自控终点散布误差δ
自控
的计算公式为:8.根据权利要求7所述的方法,其特征在于,利用各误差综合分析飞行器末段对目标的捕捉概率,其中,自控终点的散布以圆的形式体现,x和z轴方向同性,覆盖概率的密度函数利用极坐标表示为:则末段探测在允许散布区内对目标的捕捉概率p
bz
为:其中,δ为自控终点散布误差的均方差;r
t
为雷达搜索区的内切圆半径;f(
·
)为概率密度函数;r为圆半径;θ为覆盖角度;p
fg
为区域覆盖的概率。9.根据权利要求8所述的方法,其特征在于,计算一定概率条件下的目标散布域边界,并据此判断雷达搜索区域能否覆盖目标散布域,若能覆盖则满足捕捉概率要求,否则不满足。
技术总结
本发明涉及一种天基信息时效性与精确制导参数的匹配性分析方法,包括以下步骤:a、利用天基传感器获取目标信息;b、进行精确制导末段探测并设置末段探测系统参数;c、计算精确制导捕获目标的概率。本发明可以有效提高天基信息保障精确制导应用的效能。息保障精确制导应用的效能。息保障精确制导应用的效能。
技术研发人员:张金昌 和涛 伊成俊 孙峥皓 冯硕 王嘉兴 孙亚楠 宋洁璇
受保护的技术使用者:中国空间技术研究院
技术研发日:2021.12.09
技术公布日:2022/4/15
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。