1.本发明涉及海洋雷达技术领域,更具体地说,本发明具体为一种基于紧凑天线阵的高频海洋雷达目标检测方法。
背景技术:
2.高频海洋雷达作为一种新兴的海洋监测技术,具有超视距、大范围、全天候以及低成本等优点,被认为是一种能实现对各国专属经济区(eez)监测进行有效监测的高科技手段。由于传统的相控天线阵天线数目多、占地面积大、建设和维护成本高,所以单极子/交叉环天线组成的小型化紧凑天线阵以其体积小、易于安装和维护等优点得到了越来越多的关注。主要以美国codar公司生产的seasonde系统和武汉大学研制的osmar-s系统为代表
3.高频雷达目标检测能够突破地球曲率的限制,既能对视距之外的海面舰船目标和飞行目标进行检测,还可应用于海洋环境监测,监视非法走私等各项民用事业中,在军民两用领域中都具有举足轻重的作用.但高频雷达所处的电磁环境十分恶劣,除了人为的射频干扰外,突发的雷电冲击和流星余迹等瞬态干扰使雷达回波谱基底大幅抬升,导致舰船目标信号被淹没,对雷达探测性能造成严重影响,因此,瞬态干扰抑制算法的研究对实现高频雷达全天候工作具有重大意义,鉴于高频雷达一个距离-方位元内存在多艘不同运动状态舰船的情况时有发生,在繁忙的国际航道上尤其如此,因此,强杂波背景下的多目标检测是高频雷达走向实用化的关键技术。
4.基于紧凑天线阵的高频海洋雷达与传统相控阵天线阵高频雷达还有一些不同,后者可以通过波束形成技术可以将波束宽度集中在很窄的角度范围内,得到的rd图中海杂波多普勒展宽不明显,目标点较少,目标信噪比较大,可以较为容易的检测出目标点,而前者的天线系统本身就具有方向性,仅能对单向方向上的目标物进行识别,且波束宽度很宽,因而得到的rd图中信号来自于多个方向,海杂波多普勒展宽明显,目标信噪比较小,导致测距较难,另外,传统目标检测无目标物的靠近警示,完全通过人工进行避障提醒,智能化程度较低。
技术实现要素:
5.为了克服现有技术的上述缺陷,本发明的实施例提供一种基于紧凑天线阵的高频海洋雷达目标检测方法,能够在海洋环境目标物的检测识别的过程中,识别多元雷达探头前方的障碍物,测量检测点与目标物之间的距离并显示出来,以解决上述背景技术中提出的问题。
6.为实现上述目的,本发明提供如下技术方案,一种基于紧凑天线阵的高频海洋雷达目标检测方法,包括下列步骤:
7.s1:准备高频海洋雷达的接收天线器具并组装调试:高频雷达模块、串口扩展电路、上位机控制中心、上位通信接口、报警控制器、lcd模块、下位机控制中心、下位通信接口,组装连通各个电路原器件的控制线路和通信端口,硬件电路的电气特性检查无误后,可
利用仿真器进行仿真,仿真通过则可由编程器向单片机内烧录程序,检查运行情况,调试过程中采用在线编程 isp下载程序进行调试isp-in system programming,在系统编程,通过单片机的专用串行编程接口或并口对单片机内部的flash存储器进行编程;
8.s2:当检测开始时,高频海洋雷达发射超声波进行测距;该高频雷达模块以800ms为周期检测接收天线器与周围的海洋情况并输出实物检测报警信号,报警信号以数据包格式输出,每个数据包包括3个字节,格式和内容如下所述:
9.第一个字节:第一字节高四位为起始标志,用于说明此报警数据是开启模式下的数据,模式为“0101”,第一字节的低两位用于输出附加消息,第四位sx1和第三位sx0表示最近目标物的方位,00表示是雷达探头1方向, 01表示是雷达探头2方向,10表示是雷达探头3方向,11表示是雷达探头4 方向;
10.第二个字节:sxa和sxb表示x号探头检测到的目标物的危险等级,危险等级分为远距、中距、近距、危险4级,分别用00、01、10、11表示,例如第二字节数据为“10010000”,表示第一个雷达探头检测到危险状态,第二个雷达探头检测到警告状态,第三和第四个雷达探头为安全状态;
11.第三个字节:输出最近目标物的距离值,da1和da0表示最近目标物距离的第一位数据,按bcd编码,最大值为3;db0~db3表示最近目标物距离的第二位数据,按bcd编码,最大值为9;dc0表示第三位数据,0表示0,1 表示5。其中最高位默认为1。
12.s3:上位机接收数据子程序利用单片机串口0中断接收雷达模块传送过来的数据,并把数据与上一次发送的数据进行比较,如果数据中的距离值小于上一次或两个数据都来自同一个雷达模块,就判断此次数据满足发送条件,置发送就绪标志位,通知发送数据子程序可以发送数据,数据接收成功后,发送数据子程序利用单片机的串口1向下位机发送数据,采用查询中断发送,由于系统采用两个雷达模块,对应每个模块会用一个发送就绪标志位,轮流查询;
13.s4:下位机接收上位机传送过来的数据,进行校验处理后,用lcd模块显示距离,报警控制器发出警报,lcd模块负责显示最近目标物距离,利用液晶字模图形模提取工具提取得目标与波形的图形模,然后在显示中再调用图形模来显示。
14.优选地,所述步骤s1中串口扩展电路是以gm8123芯片为核心的电路, gm8123芯片将一个全双工的标准串口扩展成3个标准串口,并能通过外部引脚控制串口扩展模式:单通道工作模式和多通道工作模式,即可以指定1个子串口和母串口以相同的波特率单一的工作,也可以让所有子串口在母串口波特率基础上分频同时工作,该芯片工作在多通道模式下时,子串口能主动响应从机发送的数据,并由母串口发送给主机,同时返回子串口地址,该模式使每个从机的发送要求都能被及时地响应,即使所有从机同时有发送要求,数据也不会丢失,基本实现了主控单元和外设通讯的实时性。
15.优选地,所述步骤s3中其中上位机利用定时\计数器0的中断来计算串口0的接收超时,因为雷达模块发送数据的周期为800ms,发送数据大小为三个字节,波特率为48000bps,三个字节是连续发送,计算下来相邻字节之间接收相差200ms,可判定没有接收完整三字节数据,定义为超时,清空接收数据缓冲区,等待接收下一次数据。
16.优选地,所述步骤s4中下位机接收数据子程序利用控制中心单片机的串口接收中断接收上位机发送过来的数据,校验数据正确就置数据ready标志位,通知lcd显示子程序
显示。
17.本发明的技术效果和优点:
18.1、上述方案中,根据高频海洋雷达测距的原理,选择一块集成度高的ic 来完成超声波脉冲测距的目标检测雷达,使它能够在海洋环境目标物的检测识别的过程中,识别多元雷达探头前方的障碍物,测量检测点与目标物之间的距离并显示出来,并在船只与目标物逼近的过程中发出预险警报;
19.2、上述方案中,采用无线通信端口传输的方式,利用于高频海洋雷达测距报警系统中,节省成本,通过上位机与下位机的无线通信,安装在雷达天线阵列上位机接收到数据,然后通过无线发送模块发送数据,安装监控室的下位机通过无线接收模块接收到数据并显示出来,节省单独提供电源的麻烦,经济方便。
附图说明
20.图1为本发明的第二字节数据格式示意图。
21.图2为本发明的第三字节数据格式示意图。
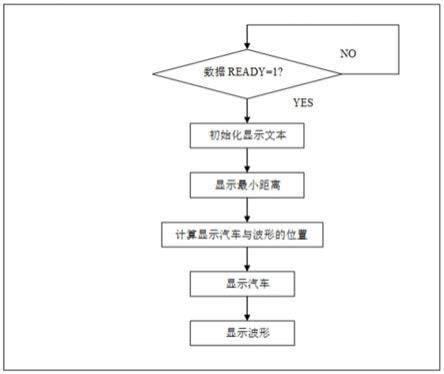
22.图3为本发明的液晶显示程序流程图示意图。
具体实施方式
23.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
24.本发明提供一种具体实施例技术方案:一种基于紧凑天线阵的高频海洋雷达目标检测方法,包括下列步骤:
25.s1:准备高频海洋雷达的接收天线器具并组装调试:高频雷达模块、串口扩展电路、上位机控制中心、上位通信接口、报警控制器、lcd模块、下位机控制中心、下位通信接口,组装连通各个电路原器件的控制线路和通信端口,硬件电路的电气特性检查无误后,可利用仿真器进行仿真,仿真通过则可由编程器向单片机内烧录程序,检查运行情况,调试过程中采用在线编程 isp下载程序进行调试isp-in system programming,在系统编程,通过单片机的专用串行编程接口或并口对单片机内部的flash存储器进行编程;
26.s2:当检测开始时,高频海洋雷达发射超声波进行测距;该高频雷达模块以800ms为周期检测接收天线器与周围的海洋情况并输出实物检测报警信号,报警信号以数据包格式输出,每个数据包包括3个字节,格式和内容如下:
27.第一个字节:第一字节高四位为起始标志,用于说明此报警数据是开启模式下的数据,模式为“0101”,第一字节的低两位用于输出附加消息,第四位sx1和第三位sx0表示最近目标物的方位,00表示是雷达探头1方向,01表示是雷达探头2方向,10表示是雷达探头3方向,11表示是雷达探头4 方向;
28.第二个字节:sxa和sxb表示x号探头检测到的目标物的危险等级,危险等级分为远距、中距、近距、危险4级,分别用00、01、10、11表示,例如第二字节数据为“10010000”,表示第一个雷达探头检测到危险状态,第二个雷达探头检测到警告状态,第三和第四个雷达探
头为安全状态;
29.第三个字节:输出最近目标物的距离值,da1和da0表示最近目标物距离的第一位数据,按bcd编码,最大值为3;db0~db3表示最近目标物距离的第二位数据,按bcd编码,最大值为9;dc0表示第三位数据,0表示0,1 表示5。其中最高位默认为1。
30.s3:上位机接收数据子程序利用单片机串口0中断接收雷达模块传送过来的数据,并把数据与上一次发送的数据进行比较,如果数据中的距离值小于上一次或两个数据都来自同一个雷达模块,就判断此次数据满足发送条件,置发送就绪标志位,通知发送数据子程序可以发送数据,数据接收成功后,发送数据子程序利用单片机的串口1向下位机发送数据,采用查询中断发送,由于系统采用两个雷达模块,对应每个模块会用一个发送就绪标志位,轮流查询;
31.s4:下位机接收上位机传送过来的数据,进行校验处理后,用lcd模块显示距离,报警控制器发出警报,lcd模块负责显示最近目标物距离,利用液晶字模图形模提取工具提取得目标与波形的图形模,然后在显示中再调用图形模来显示。
32.其中,步骤s1中串口扩展电路是以gm8123芯片为核心的电路,gm8123 芯片将一个全双工的标准串口扩展成3个标准串口,并能通过外部引脚控制串口扩展模式:单通道工作模式和多通道工作模式,即可以指定1个子串口和母串口以相同的波特率单一的工作,也可以让所有子串口在母串口波特率基础上分频同时工作,该芯片工作在多通道模式下时,子串口能主动响应从机发送的数据,并由母串口发送给主机,同时返回子串口地址,该模式使每个从机的发送要求都能被及时地响应,即使所有从机同时有发送要求,数据也不会丢失,基本实现了主控单元和外设通讯的实时性。
33.其中,步骤s3中其中上位机利用定时\计数器0的中断来计算串口0的接收超时,因为雷达模块发送数据的周期为800ms,发送数据大小为三个字节,波特率为48000bps,三个字节是连续发送,计算下来相邻字节之间接收相差 200ms,可判定没有接收完整三字节数据,定义为超时,清空接收数据缓冲区,等待接收下一次数据,用于针对接收数据超时的重新处理,提高改系统的容错性。
34.其中,步骤s4中下位机接收数据子程序利用控制中心单片机的串口接收中断接收上位机发送过来的数据,校验数据正确就置数据ready标志位,通知lcd显示子程序显示,通过lcd模块进行图像与距离的显示,使得目标检测更加直观精准。
35.最后需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
36.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。