1.本实用新型属于天线伺服控制领域,涉及一种短背射天线伺服控制装置。
背景技术:
2.遥测天线伺服控制系统是遥测地面跟踪站的重要组成部分,其主要作用是操作人员通过手动控制、程序控制等多种控制方式对天线的方位和俯仰姿态进行控制,确保遥测天线主瓣波束对飞行目标的实时对准,保证遥测信号的正确接收。目前,传统的遥测地面站主要以抛物面天线形式的车载遥测站为主,但是由于抛物面天线结构体积较大,故具有展开和撤收时间较长,布站人力消耗大,运输复杂以及成本较高等缺点,针对野外快速作战、武器试验前遥测信号监测、近程导弹跟踪等应用场景,采用传统遥测车载站造成资源消耗较大。
技术实现要素:
3.有鉴于此,本实用新型的目的在于提供一种短背射天线伺服控制装置。
4.为达到上述目的,本实用新型提供如下技术方案:
5.一种短背射天线伺服控制装置,包括下基座、上基座、天线安装板、短背射天线;
6.所述下基座为方形,其内设有方位伺服机构、电源模块、控制模块、两个光端机模块及两个切换模块;
7.所述上基座包括互相配合的左上基座和右上基座,在所述左上基座一端设有左支撑臂,所述右上基座一端设有右支撑臂,在左上基座与右上基座内设有俯仰伺服机构,在左支撑臂和右支撑臂内均设有腔体滤波器和低噪声放大器,在其中一个支撑臂内还设有功分器;所述上基座连接方位伺服机构,所述天线安装板连接俯仰伺服机构;所述短背射天线设置在天线安装板上;
8.所述控制模块与方位伺服机构、俯仰伺服机构、光端机模块、切换模块电性连接,并通过网络连接上位机;
9.所述两个切换模块分别与左支撑臂和右支撑臂中的低噪声放大器连接,后分成两路,一路与光端机模块连接,输出光信号左、右旋信号,另一路直接输出射频左、右旋信号;
10.所述电源模块与控制模块、方位伺服机构、俯仰伺服机构、光端机模块及切换模块电性连接。
11.进一步,所述短背射天线与圆极化器连接,再分别连接左支撑臂和右支撑臂中的腔体滤波器、低噪声放大器,将接收到的电磁波转化为左、右旋圆极化高频电流的同时通过腔体滤波器、低噪声放大器后送给下变频器。
12.进一步,所述方位伺服机构包括方位轴、方位电机、第一驱动器、方位编码器、第一霍尔传感器及下圆板;所述方位轴上设有第一限位开关和方位电限位螺钉;所述方位编码器和第一霍尔传感器设置在所述方位轴上方;所述第一驱动器安装在下基座内;所述方位电机与方位轴连接;所述下圆板与方位轴连接,所述上左基座和上右基座固定在下圆板上。
13.进一步,所述俯仰伺服机构包括第一俯仰轴、俯仰电机、第二驱动器、俯仰编码器、第二霍尔传感器;所述第二驱动器通过第二驱动器安装板安装在上左基座内;所述俯仰电机与第一俯仰轴连接;所述第一俯仰轴上设有第二限位开关和俯仰电限位螺钉;所述上右基座内设有第二俯仰轴;所述天线安装板设置在上左基座和上右基座上端,与所述第一俯仰轴、第二俯仰轴连接。
14.进一步,所述控制模块包括控制芯片、与所述控制芯片连接的phy、存储器、二次电源、第一差分接口、第二差分接口、光耦隔离;所述phy为单端口10/100m以太网物理层收发电路,连接上位机;所述二次电源连接电源模块;所述第一差分接口通过can连接第一驱动器和第二驱动器,所述第二差分接口通过rs422连接方位编码器和俯仰编码器,所述光耦隔离连接第一霍尔传感器和第二霍尔传感器。
15.进一步,还包括切换按钮开关,与控制模块连接,控制切换模块在左右旋射频信号与光信号左右旋射频信号间进行切换。
16.进一步,所述电源模块为ac/dc电源模块,功率为200w,其输出 24v连接电源板,所述电源板为控制模块提供 5v电源电压,为光端机提供
±
5v电源电压,为低噪声放大器、切换模块提供 12v电源电压,为驱动器、霍尔传感器、旋转编码器提供 24v电源电压。
17.进一步,所述下基座上还包括与方位轴连接且相配合的方位锁定支座和方位锁定螺钉,所述上基座上还包括与俯仰轴连接且相配合的俯仰锁定支座和俯仰锁定螺钉,还包括设置在上基座一侧的俯仰硬限位撞块。
18.本实用新型的有益效果在于:本方案与上位机通过以太网互联技术进行数据交互,传输距离更远更可靠;与电机的通信采用can总线通信,以一个can总线同时控制方位和俯仰两轴电机转动,节省io端口数量;增加光端机和切换模块,可以在射频信号和光信号间进行切换输出;下基座采用方形结构,内部容量更大。
19.本实用新型的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本实用新型的实践中得到教导。本实用新型的目标和其他优点可以通过下面的说明书来实现和获得。
附图说明
20.为了使本实用新型的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型作优选的详细描述,其中:
21.图1为程控天线系统组成框图;
22.图2为程控天线系统原理框图;
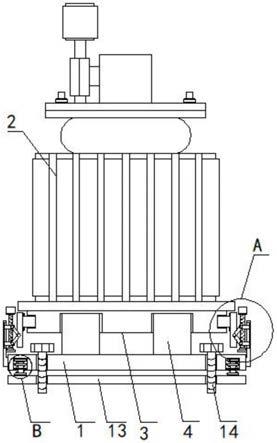
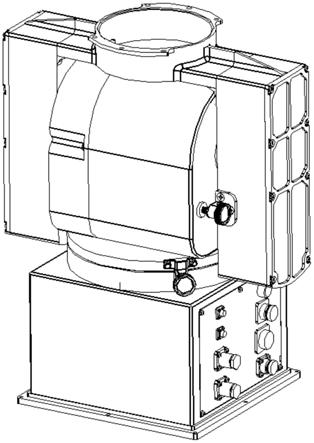
23.图3为程控天线座整体结构图;
24.图4为程控天线座正视图;
25.图5为图4的a-a剖面图;
26.图6为图4的b-b剖面图;
27.图7为短背射天线工作原理框图;
28.图8为程控天线座原理框图;
29.图9为ac/dc电源电源模块输入输出示意图;
30.图10为电源板原理框图;
31.图11为控制板原理框图;
32.图12为上左基座侧视图;
33.图13为上左基座正视图;
34.图14为下基座俯视图;
35.图15为下基座方位轴安装示意图。
36.附图标记:1-下基座,2-上基座,3-下圆板,4-腔体滤波器,5-低噪声放大器,6-俯仰硬限位撞块,7-方位锁定支座,8-方位锁定螺钉,9-俯仰锁定支座,10-俯仰锁定螺钉,11-功分器,12-俯仰电机,13-驱动器安装组件,14-上左基座,15-俯仰编码器安装板,16-俯仰电机挡板,17-俯仰电限位螺钉,18-俯仰轴,19-俯仰编码器,20-俯仰电感式传感器,21-切换模块安装板,22-控制板安装板,23-方位电机,24-电源安装板,25-传感器安装板,26-方位编码器安装板,27-方位电机挡板,28-方位电限位螺钉,29-方位编码器,30-方位电感式传感器,31-方位硬限位组件,32-方位轴。
具体实施方式
37.以下通过特定的具体实例说明本实用新型的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本实用新型的其他优点与功效。本实用新型还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本实用新型的精神下进行各种修饰或改变。需要说明的是,以下实施例中所提供的图示仅以示意方式说明本实用新型的基本构想,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。
38.其中,附图仅用于示例性说明,表示的仅是示意图,而非实物图,不能理解为对本实用新型的限制;为了更好地说明本实用新型的实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;对本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的。
39.本实用新型实施例的附图中相同或相似的标号对应相同或相似的部件;在本实用新型的描述中,需要理解的是,若有术语“上”、“下”、“左”、“右”、“前”、“后”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此附图中描述位置关系的用语仅用于示例性说明,不能理解为对本实用新型的限制,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
40.请参阅图1~图15,为本实施例提供的一种短背射天线伺服控制装置。
41.程控天线系统主要由短背射天线和天线伺服控制装置组成。其系统组成框架如图1所示。程控天线系统主要由短背射天线和天线伺服控制装置组成,用户可依据实际应用需求,通过手动控制、程序控制等多种控制方式对天线的方位和俯仰姿态进行控制,确保短背射平板天线主瓣波束对飞行目标的实时对准,保证遥测信号的正确接收。
42.在本实施例中,程控天线系统原理框图如图2所示。短背射天线主要由辐射单元、腔体滤波器4、极化和lna网络组成,主要完成短背射遥测无线信号的接收。天线伺服控制装置主要由电源单元、控制单元、伺服机构和光端机模块组成,其中电源单元包括ac/dc电源
模块和电源板组成,控制单元主要由控制板组成,伺服机构主要由方位伺服机构和俯仰伺服机构组成,光端机主要由切换模块和光端机组成,其中光端机主要将左右旋射频信号转换成光信号并输出,切换模块主要完成左右旋射频信号与光信号左右旋射频信号的切换。程控天线系统主要包含射频信号与数据两类接口形式,其中射频接口主要完成射频信号的传输;数据接口主要采用网络接口和串口接口,主要完成接收上位机发送的控制指令和上报天线运行状态。程控天线系统射频接插件选用高频接插件,自带密封圈保证接插件防水特性。程控天线系统共包含一路网络接口,分别用于与控制板的数据指令交互。程控天线系统共包含一路rs-422接口(备用),主要用于与控制板的数据指令交互。
43.程控天线系统主要由短背射天线和天线伺服控制装置组成,其中,天线伺服控制装置主要由方位伺服机构和俯仰伺服结构两部分组成,方位伺服机构中安装切换电源板、控制板和方位电机、角度编码器、限位开关和传动机构,俯仰伺服机构安装俯仰电机、角度编码器、限位开关和传动机构。其结构示意图如图3-6所示。
44.短背射接收天线由短背射天线、圆极化器、腔体滤波器4、低噪声放大器5、相应的电缆功分器11等组成。短背射接收天线将接收到的电磁波转化为左、右旋圆极化高频电流同时通过腔体滤波器4、低噪声放大器5后送给下变频器。短背射接收天线的信号流程及原理框图见图7.
45.在本实施例中,短背射接收天线的技术指标可以是:
46.短背射天线:电压驻波比:ρ≤1.5(在工作频段内);天线增益:g≥16db;波瓣宽度:2θ0.5≥22
°
(在工作点频内);极化方式:左右旋圆极化同时接收。
47.极化电桥:电压驻波比:ρ≤1.5;移相:90
°±
0.5
°
(中心频率);插损:≤0.3db;不平衡度:≤0.2db;隔离度:≥30db(中心频率),隔离度:≥20db(两端频率)。
48.腔体滤波器4:电压驻波比:小于1.5;插损:小于0.7db;隔离度:相隔两端250mhz时衰减85db;接口:sma座;承受功率:15w。
49.低噪声放大器5:电压驻波比:不大于1.5;1db压缩点:不小于15dbm;噪声系数:不大于1.2db;增益:不小于35db;接口:sma座;增益不平度:
±
0.5db;安装尺寸:四个3.5mm螺钉通孔;外供电:直流 12v。
50.天线伺服控制装置主要由上基座2(包括左基座14和上右基座)、两个支撑臂以及下基座1组成,在其内安装电源单元、控制单元、伺服机构和光端机模块,其中电源单元包括ac/dc电源模块和电源板组成,控制单元主要由控制板组成,伺服机构主要由方位伺服机构和俯仰伺服机构组成,光端机主要由切换模块和光端机组成,其中光端机主要将左右旋射频信号转换成光信号并输出,切换模块主要完成左右旋射频信号与光信号左右旋射频信号的切换,其原理框图如图8所示。
51.如图9所示,在选择ac/dc电源模块时首先须对设备的电源需求以及功耗进行估算,其中,低噪声放大器5和切换模块输入电压 12v,其功耗为12w,控制板输入电压 5v,功耗为3w,光端机每个功耗为0.5w,功耗为1w,方位电机和俯仰电机12分别输入电压为 24v,设备功耗为96w,光编和霍尔输入电压为 24v,功耗为9w,总功耗为121w,依据降额使用原则,选用200w电源产品进行设计,能够满足地面设备供电。
52.电源板主要为控制板提供 5v电源电压,为光端机提供
±
5v电源电压,为lna、切换模块提供 12v电源电压,为驱动器、霍尔传感器、旋转编码器提供 24v电源电压,其原理框
图如图10所示。
53.如图11所示,控制板通过网络接收上位机的控制指令,同时采集天线角度反馈数据、天线限位状态、驱动板状态,进行pid解算后,产生相应变化的角度指令,发送给驱动板控制电机的运行速度,完成天线方位和俯仰姿态的控制。
54.在本实施例中,控制板核心控制芯片为32位arm cortex-m4处理器,工作频率168mhz,采用90nm工艺制造。
55.在本实施例中,phy是一款单端口10/100m以太网物理层收发电路,实现10base-t、100base-tx数据收发,支持ieee802.3标准,支持自协商、自适应、能量检测,具有自动mdix功能,3.3vmac接口,支持ieee802.3mii、rmii和sni接口,它与stm32f407连接实现网络通信,功耗不超过0.3mw。
56.在本实施例中,eeprom存储器256k,擦写次数200万次,数据保存100年,该芯片主要用于保存参数文件和程控数据,程序控制方式要求保存最大1000秒数据,时间、方位、俯仰数据各4个字节,1000秒数据共12000字节,足够满足要求。
57.在本实施例中,差分接口芯片将arm主控芯片产生的时钟信号变成rs422电平信号给安装在天线座上的绝对光编,同时将绝对光编反馈的角度数字量传输给arm主控芯片处理。
58.在本实施例中,二次电源将输入的5v电压进行稳压转换,输出芯片工作所需的3.3v电压。
59.伺服机构的机械结构平台为天线座,在结构上分为方位、俯仰两轴传动机构,具有结构紧凑,承载能力大,便于调整的优点,起着支撑天线及其他设备的作用,并在外信号控制下,以一定的角速度和角加速度在方位俯仰轴上推动天线运转,保证天线精确跟踪目标。
60.伺服传动机构主要包括方位俯仰两轴电机、减速器、角度编码器、限位开关等设备,其中,角度编码器以电信号形式送出两个轴向角位置数据,获取天线当前运行角度和角加速度;限位开关主要是为了检测天线的极限位置状态,避免天线运行出工作范围而造成的设备损坏。
61.俯仰伺服机构主要由俯仰轴18,俯仰编码器19、俯仰驱动器、俯仰电感式传感器20、俯仰电机12、减速器组成,其结构示意图如图12-13所示。通过驱动器安装组件13安装驱动器,通过俯仰编码器安装板15安装俯仰编码器,通过俯仰电机挡板16固定俯仰电机,俯仰电限位螺钉17用于限制俯仰角度。
62.方位伺服机构主要由所述方位伺服机构包括方位轴32、方位电机23、第一驱动器、方位编码器29、第一霍尔传感器、方位电感式传感器30及下圆板3组成,其结构示意图如图14-15所示,所述方位轴上设有第一限位开关和方位电限位螺钉28;所述方位编码器29和第一霍尔传感器设置在所述方位轴上方;所述第一驱动器安装在下基座内;所述方位电机与方位轴连接;所述下圆板与方位轴连接,所述上左基座和上右基座固定在下圆板上。下基座1内还通过切换模块安装板21安装切换模块,控制板安装板22安装控制板,利用电源安装板24安装电源,通过传感器安装板25安装方案电感式传感器30,通过方位编码器安装板26安装方位编码器,利用方位电机挡板27固定方位电机,还包括用于限制方位角度的方位硬限位组件31。
63.所述下基座上还包括与方位轴连接且相配合的方位锁定支座7和方位锁定螺钉8,
可以通过旋转方位锁定螺钉,手动固定方位轴,所述上基座上还包括与俯仰轴连接且相配合的俯仰锁定支座9和俯仰锁定螺钉10,同理,可以手动固定俯仰轴,还包括设置在上基座一侧的俯仰硬限位撞块6,用来对俯仰的角度进行强制硬限位。
64.最后说明的是,以上实施例仅用以说明本实用新型的技术方案而非限制,尽管参照较佳实施例对本实用新型进行了详细说明,本领域的普通技术人员应当理解,可以对本实用新型的技术方案进行修改或者等同替换,而不脱离本技术方案的宗旨和范围,其均应涵盖在本实用新型的权利要求范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。