一种上位机应用多种通讯方式实现agv远程控制装置
技术领域
1.本实用新型涉及远程控制技术领域,特别是一种上位机应用多种通讯方式实现agv远程控制装置。
背景技术:
2.agv(automated guided vehicle,自动导航运输车)是在生产车间进行物料运输的一种配送工具,能够沿铺设的磁条导引路径行驶,工业应用中无需驾驶员的搬运车,以可充电的蓄电池为其动力来源。
3.agv系统的控制是由上位机调度系统、agv车载控制系统和无线通信系统协作完成的,由于复合机器人集成系统的复杂性,当前技术方案均无法将工业机器人,plc,3d激光传感器,力控传感器,激光导航agv,还有液压系统,供气系统等一系列复杂的工业设备集成控制,仅仅只通过一种通讯协议,集成到工控机的控制软件中,使其成为一套完整独立的复合机器人加工系统,安全性和稳定性上都欠缺,而且在数据的传输上的又延迟,无法实时监测控制,因此需要对现有的技术方案进行改进。
技术实现要素:
4.本实用新型的目的是为了解决上述问题,设计了一种上位机应用多种通讯方式实现agv远程控制装置。
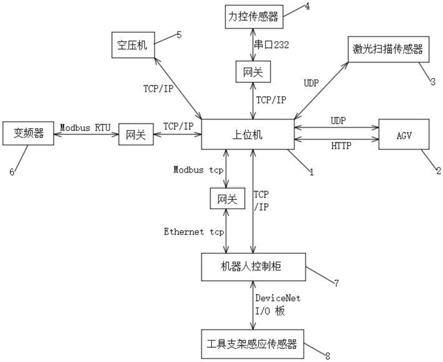
5.实现上述目的本实用新型的技术方案为,一种上位机应用多种通讯方式实现agv远程控制装置,包括上位机、变频器、agv、机器人控制柜、激光扫描传感器、工具支架感应传感器、力控传感器和空压机,所述上位机通过网关分别与所述变频器、机器人控制柜和力控传感器连接,所述机器人控制柜通过devicenet i/o板与所述工具支架感应传感器连接,所述上位机通过http协议与所述agv的api接口连接。
6.作为本实用新型的进一步补充,所述上位机通过网关将所述变频器的串口modbus rtu协议转换为tcp/ip协议,所述变频器通过硬线外接铣刀主轴电机。
7.作为本实用新型的进一步补充,所述上位机通过网关将所述力控传感器的串口232协议转换成tcp/ip协议。
8.作为本实用新型的进一步补充,所述上位机与所述agv的急停信息通过udp协议传输数据,所述上位机与所述agv通过tcp/ip协议传输数据。
9.作为本实用新型的进一步补充,所述上位机与所述机器人控制柜通过tcp/ip协议传输数据。
10.作为本实用新型的进一步补充,所述激光扫描传感器安装在激光设备上,所述上位机通过sdk控制激光设备,并通过udp协议传输激光数据。
11.作为本实用新型的进一步补充,所述机器人控制柜外接机器人,所述上位机能实时控制机器人执行的各种轨迹,机器人传输的实时坐标信息每4毫秒通过udp协议传输给上位机,所述上位机通过调用机器人的sdk,控制机器人devecenet i/o信号。
12.作为本实用新型的进一步补充,所述机器人控制柜的工业通讯协议ethernet/ip和所述上位机的modbus tcp协议通过网关转换。
13.作为本实用新型的进一步补充,所述上位机与所述空压机通过tcp/ip协议传输数据。
14.其有益效果在于,本实用新型具有很强的实时性,对于高实时性要求的力控传感器、激光传感器以及机器人控制器数据传输,能够很好的满足要求,而且本实用新型的安全性和稳定性也很强,对于急停信号等对于人员和设备安全有很高要求的,通过udp每100ms发送一次数据,若超过100ms上位机没收到数据,则上位机判定有急停信号产生,不同协议间的数据交互通过网关来转换,所以在重要数据传输上都采用了网关,这样可避免通过中间设备来中转,大大减少了故障率。
附图说明
15.图1是本实用新型的结构示意图。
16.图中,1、上位机;2、agv;3、激光扫描传感器;4、力控传感器;5、空压机;6、变频器;7、机器人控制柜;8、工具支架感应传感器。
具体实施方式
17.首先说明一下本实用新型的设计初衷,目前的技术方案无法将工业机器人,plc,3d激光传感器,力控传感器,激光导航agv,还有液压系统,供气系统等一系列复杂的工业设备集成控制,而且数据执行时会有一定的延迟,安全性和稳定性也无法得到保证,为了解决上述问题,本实用新型提供了一种上位机应用多种通讯方式实现agv远程控制装置。
18.本实用新型需要将多种通讯方式进行有效的搭配才能够远程控制agv复合机器人系统实时、稳定、有效、安全的工作,下面结合附图对本实用新型进行具体描述:
19.如图1所示,该agv远程控制装置主要包括上位机1、变频器6、agv 2、机器人控制柜7、激光扫描传感器3、工具支架感应传感器8、力控传感器4和空压机5,其中上位机1通过网关与变频器6连接,把变频器6的串口modbus rtu协议转换为tcp/ip协议,起到上位机1无线控制变频器6的作用,变频器6通过硬线连接来控制铣刀主轴电机。
20.上位机1和力控传感器4通过网关连接,把力控传感器4的串口232协议转换成tcp/ip协议,达到上位机1无线闭环控制力控传感器4的功能;上位机1通过http协议调用agv 2的api接口,通过tcp/ip协议传输数据,达到无线控制agv 2的作用;上位机1与agv 2的急停信息通过udp协议传输,达到无线交互急停信息作用。
21.机器人控制柜7通过devicenet i/o板与工具支架感应传感器8连接,上位机1与机器人控制柜7通过tcp/ip协议传输数据,机器人控制柜7外接机器人,机器人控制柜7的工业通讯协议ethernet/ip和上位机1的modbus tcp协议通过网关转换,上位机1可直接和机器人通讯,上位机1通过上述协议能实时控制机器人执行的各种轨迹,实现对机器人的实时控制;机器人传输的实时坐标信息每4毫秒通过udp协议传输给上位机1,上位机1通过调用机器人的sdk,控制机器人devecenet i/o信号,达到无线控制液压系统、工期系统等一系列复杂的工业设备的作用。
22.激光扫描传感器3安装在激光设备上,上位机1通过sdk控制激光设备,并通过udp
协议传输激光数据,达到无线获取激光数据的作用;激光设备被机器人使用devicenet i/o信号触发,数据通过udp传输给上位机1;上位机1与空压机5通过tcp/ip协议传输数据,达到无线控制空压机5的功能,本实用新型由于在不同协议间的数据交互通过网关来转换,所以在重要数据传输上都采用了网关,这样可避免通过中间设备来中转,大大减少了故障率,在实时性、安全性和稳定性方面都得到了较大提高。
23.上述技术方案仅体现了本实用新型技术方案的优选技术方案,本技术领域的技术人员对其中某些部分所可能做出的一些变动均体现了本实用新型的原理,属于本实用新型的保护范围之内。
技术特征:
1.一种上位机应用多种通讯方式实现agv远程控制装置,其特征在于,包括上位机(1)、变频器(6)、agv(2)、机器人控制柜(7)、激光扫描传感器(3)、工具支架感应传感器(8)、力控传感器(4)和空压机(5),所述上位机(1)通过网关分别与所述变频器(6)、机器人控制柜(7)和力控传感器(4)连接,所述机器人控制柜(7)通过devicenet i/o板与所述工具支架感应传感器(8)连接,所述上位机(1)通过http协议与所述agv(2)的api接口连接。2.根据权利要求1所述的一种上位机应用多种通讯方式实现agv远程控制装置,其特征在于,所述上位机(1)通过网关将所述变频器(6)的串口modbus rtu协议转换为tcp/ip协议,所述变频器(6)通过硬线外接铣刀主轴电机。3.根据权利要求1所述的一种上位机应用多种通讯方式实现agv远程控制装置,其特征在于,所述上位机(1)通过网关将所述力控传感器(4)的串口232协议转换成tcp/ip协议。4.根据权利要求1所述的一种上位机应用多种通讯方式实现agv远程控制装置,其特征在于,所述上位机(1)与所述agv(2)的急停信息通过udp协议传输数据,所述上位机(1)与所述agv(2)通过tcp/ip协议传输数据。5.根据权利要求1所述的一种上位机应用多种通讯方式实现agv远程控制装置,其特征在于,所述上位机(1)与所述机器人控制柜(7)通过tcp/ip协议传输数据。6.根据权利要求1所述的一种上位机应用多种通讯方式实现agv远程控制装置,其特征在于,所述激光扫描传感器(3)安装在激光设备上,所述上位机(1)通过sdk控制激光设备,并通过udp协议传输激光数据。7.根据权利要求1所述的一种上位机应用多种通讯方式实现agv远程控制装置,其特征在于,所述机器人控制柜(7)外接机器人,所述上位机(1)能实时控制机器人执行的各种轨迹,机器人传输的实时坐标信息每4毫秒通过udp协议传输给上位机(1),所述上位机(1)通过调用机器人的sdk,控制机器人devecenet i/o信号。8.根据权利要求1所述的一种上位机应用多种通讯方式实现agv远程控制装置,其特征在于,所述机器人控制柜(7)的工业通讯协议ethernet/ip和所述上位机(1)的modbus tcp协议通过网关转换。9.根据权利要求1所述的一种上位机应用多种通讯方式实现agv远程控制装置,其特征在于,所述上位机(1)与所述空压机(5)通过tcp/ip协议传输数据。
技术总结
本实用新型公开了一种上位机应用多种通讯方式实现AGV远程控制装置,包括上位机、变频器、AGV、机器人控制柜、激光扫描传感器、工具支架感应传感器、力控传感器和空压机,所述上位机通过网关分别与所述变频器、机器人控制柜和力控传感器连接,所述机器人控制柜通过DeviceNetI/O板与所述工具支架感应传感器连接,所述上位机通过HTTP协议与所述AGV的API接口连接。本实用新型具有很强的实时性,对于高实时性要求的力控传感器、激光传感器以及机器人控制器数据传输,能够很好的满足要求,而且其安全性和稳定性也很强,不同协议间的数据交互通过网关来转换,所以在重要数据传输上都采用了网关,这样可避免通过中间设备来中转,大大减少了故障率。大减少了故障率。大减少了故障率。
技术研发人员:陈飞
受保护的技术使用者:上海辛莫智能科技有限公司
技术研发日:2021.12.09
技术公布日:2022/4/13
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。