用于机器人清洁器集尘杯的碎屑鳍片
1.相关申请交叉引用
2.本技术要求2019年8月28日提交的标题为“被配置成拉直进入到其上的空气内夹带的纤维碎屑的用于机器人清洁器集尘杯的碎屑鳍片”的第62/892,953号美国临时专利,以及2020年4月21日提交的标题为“被配置成拉直进入到其上的空气内夹带的纤维碎屑的用于机器人清洁器集尘杯的碎屑鳍片”的第63/013,188号美国临时申请的权益,所述临时申请中的每一个以引用方式全文并入本文中。
技术领域
3.本公开大体上涉及自动清洁设备,且更确切地说,涉及具有至少一个集尘杯的机器人清洁器。
背景技术:
4.自动表面处理设备被配置成遍历表面(例如,底板),同时在几乎没有人参与的情况下从表面取出碎屑。例如,机器人吸尘器可以包含控制器、多个从动轮、抽吸电机、刷辊以及用于存储碎屑的集尘杯。控制器使机器人吸尘器根据一种或多种模式(例如,随机反弹模式、定点模式,沿墙壁/障碍物模式等)行进。当根据一种或多种模式行进时,机器人吸尘器将碎屑收集在集尘杯中。当集尘杯收集碎屑时,机器人吸尘器的性能可能会降级。因此,可能需要定期清空集尘杯,以保持一致的清洁性能。
技术实现要素:
5.本公开提供了一种用于机器人清洁器集尘杯的碎屑鳍片,包括:鳍片支架;以及气流主体,所述气流主体根据发散角从所述鳍片支架延伸,所述气流主体限定气流表面,所述气流主体被配置成拉直进入到其上的空气内夹带的纤维碎屑。
6.在一些实施例中,所述气流主体包含从所述气流表面延伸的一个或多个肋板。
7.在一些实施例中,所述气流主体包含限定在所述气流表面中的一个或多个凹槽。
8.在一些实施例中,所述气流主体的后边缘限定波形。
9.在一些实施例中,所述波形是方波。
10.在一些实施例中,所述波形是弯曲波。
11.在一些实施例中,进一步包括清理肋。
12.在一些实施例中,进一步包括覆盖物,所述覆盖物沿着所述气流主体的至少一部分延伸。
13.本公开还提供了一种用于机器人清洁器的集尘杯,包括:集尘杯顶部;集尘杯底座;在所述集尘杯顶部与所述集尘杯底座之间延伸的一个或多个侧壁;以及碎屑鳍片,所述碎屑鳍片的至少一部分在所述集尘杯顶部与所述集尘杯底座之间且在所述集尘杯底座的方向上延伸,所述碎屑鳍片包含限定气流表面的气流主体,所述气流主体被配置成拉直进入到其上的空气内夹带的纤维碎屑。
14.在一些实施例中,进一步包括限定在所述一个或多个侧壁中的对应一个中的机器人清洁器集尘杯入口。
15.在一些实施例中,所述气流主体横向于所述机器人清洁器集尘杯入口的中心轴延伸。
16.在一些实施例中,进一步包括限定在所述一个或多个侧壁中的对应一个中的机器人清洁器集尘杯出口。
17.在一些实施例中,进一步包括邻近所述机器人清洁器集尘杯出口的导流器,所述导流器被配置成在远离所述集尘杯顶部的方向上推动进入到其上的空气。
18.在一些实施例中,所述碎屑鳍片包含从所述气流表面延伸的一个或多个肋板。
19.在一些实施例中,所述碎屑鳍片包含限定在所述气流表面中的一个或多个凹槽。
20.在一些实施例中,所述碎屑鳍片的后边缘限定波形。
21.在一些实施例中,所述波形是方波。
22.在一些实施例中,所述波形是弯曲波。
23.在一些实施例中,所述碎屑鳍片包含清理肋。
24.在一些实施例中,所述碎屑鳍片进一步包括覆盖物,所述覆盖物沿着所述气流主体的至少一部分延伸。
附图说明
25.这些以及其它特征和优点将通过阅读以下结合图式进行的详细描述而得到更好的理解,其中:
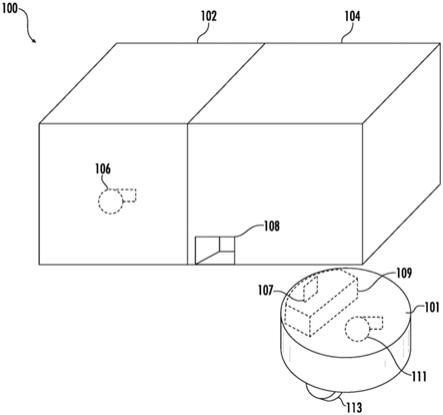
26.图1示出根据本公开的实施例的机器人清洁器和机器人清洁器对接站的示意性实例。
27.图2示出根据本公开的实施例的机器人清洁器集尘杯的示意性实例。
28.图3示出根据本公开的实施例的碎屑鳍片的实例的透视图。
29.图4示出根据本公开的实施例的图3的碎屑鳍片的端视图。
30.图5示出根据本公开的实施例的碎屑鳍片的实例的透视图。
31.图6示出根据本公开的实施例的图5的碎屑鳍片的透视端视图。
32.图7示出根据本公开的实施例的碎屑鳍片的实例的透视图。
33.图8示出根据本公开的实施例的碎屑鳍片的实例的透视图。
34.图9示出根据本公开的实施例的图8的碎屑鳍片的端视图。
35.图10示出根据本公开的实施例的碎屑鳍片的实例的透视图。
36.图11示出根据本公开的实施例的碎屑鳍片的实例的透视图。
37.图12示出根据本公开的实施例的机器人清洁器集尘杯的实例的透视图。
38.图13示出根据本公开的实施例的沿着线xiii-xiii截取的图12的机器人清洁器集尘杯的实例的截面图。
39.图14示出根据本公开的实施例的从其移除可打开门的图12的集尘杯的俯视图。
40.图15示出根据本公开的实施例的机器人清洁器集尘杯的实例的截面透视图。
41.图16示出根据本公开的实施例的图15的机器人清洁器集尘杯的另一截面图。
42.图17示出根据本公开的实施例的具有碎屑鳍片的机器人清洁器集尘杯的实例的
截面透视图。
43.图18示出根据本公开的实施例的图17的碎屑鳍片的透视图。
44.图19a示出根据本公开的实施例的沿着图18的线xix-xix截取的图17的碎屑鳍片的透视截面图。
45.图19b示出根据本公开的实施例的图17的碎屑鳍片的透视分解图。
46.图20示出根据本公开的实施例的具有碎屑鳍片的机器人清洁器集尘杯的实例的截面透视图。
47.图21示出根据本公开的实施例的图20的碎屑鳍片的透视图。
48.图22示出根据本公开的实施例的沿着图21的线xxii-xxii截取的图20的碎屑鳍片的透视截面图。
49.图23示出根据本公开的实施例的图20的碎屑鳍片的透视分解图。
50.图24示出根据本公开的实施例的图20的碎屑鳍片的透视图。
51.图25示出根据本公开的实施例的碎屑鳍片的实例的俯视透视图。
52.图26示出根据本公开的实施例的图25的碎屑鳍片的仰视透视图。
53.图27示出根据本公开的实施例的图25的碎屑鳍片的侧视图。
54.图28示出根据本公开的实施例的图25的碎屑鳍片的俯视图。
55.图29示出根据本公开的实施例的图25的碎屑鳍片的截面透视图。
56.图30示出根据本公开的实施例的图25的碎屑鳍片的另一截面透视图。
具体实施方式
57.本公开大体上涉及一种用于机器人清洁器的集尘杯。机器人清洁器集尘杯包含机器人清洁器集尘杯入口和机器人清洁器集尘杯出口。碎屑鳍片在横向于机器人清洁器集尘杯的水平面的方向上在机器人清洁器集尘杯的顶表面与底表面之间延伸。碎屑鳍片被配置成在清洁操作期间接合吸入到机器人清洁器集尘杯入口中的碎屑。碎屑鳍片与纤维碎屑(例如,头发或细绳)的接合可以促进拉直和/或阻止进入机器人清洁器集尘杯的纤维碎屑的缠结。因此,当清空机器人清洁器集尘杯(例如,使用对接站)时,可以更容易地从机器人清洁器集尘杯出口吸入碎屑。另外或替代地,碎屑鳍片可以防止沉积在机器人清洁器集尘杯内的纤维碎屑的至少一部分通过机器人清洁器集尘杯入口离开机器人清洁器集尘杯(例如,通过物理地遮挡机器人清洁器集尘杯入口的至少一部分和/或通过增加通过机器人清洁器集尘杯入口的空气的流速)。例如,此配置可以减少缠结在机器人清洁器的搅动器上的纤维碎屑的量。因此,在一些情况下,碎屑鳍片通常可以被描述为促进纤维碎屑在机器人清洁器集尘杯内的单个方向上迁移(例如,从机器人清洁器集尘杯入口朝向机器人清洁器集尘杯出口)。
58.在一些情况下,机器人清洁器集尘杯可以例如包含清理肋,所述清理肋被配置成接合机器人清洁器的搅动器的部分。接合被配置成使得可以从其移除缠结在搅动器上的纤维碎屑的至少一部分。清理肋可以连接到机器人清洁器集尘杯的主体(例如,机器人清洁器集尘杯的底座、顶部或侧壁)或碎屑鳍片中的一个或由机器人清洁器集尘杯的主体(例如,机器人清洁器集尘杯的底座、顶部或侧壁)或碎屑鳍片中的一个一体地形成。相对于当清理肋连接到机器人清洁器集尘杯的主体或由机器人清洁器集尘杯的主体一体地形成时,当连
接到碎屑鳍片或由碎屑鳍片一体地形成时,可以减小由于搅动器与清理肋之间的接合产生的声音。
59.图1示出对接站100的示意图。对接站100包含底座102和对接站集尘杯104。底座102包含流体连接到对接站入口108和对接站集尘杯104的对接抽吸电机106(以虚线示出)。当激活对接抽吸电机106时,使流体通过对接站集尘杯104流入对接站入口108中,并且在穿过对接抽吸电机106之后离开底座102。
60.对接站入口108被配置成流体连接到机器人清洁器101(例如,机器人吸尘器、机器人拖把,和/或任何其它机器人清洁器)。机器人清洁器101可以包含具有出口端107(以虚线示出)的机器人清洁器集尘杯109、流体连接到机器人清洁器集尘杯109的机器人清洁器抽吸电机111(以虚线示出),以及被配置成在表面上推动机器人清洁器101的一个或多个从动轮113。例如,对接站入口108可以被配置成流体连接到设置在机器人清洁器集尘杯109(以虚线示出)中的出口端107(以虚线示出),使得可以将存储于机器人清洁器101的集尘杯中的碎屑传递到对接站集尘杯104中。当激活对接抽吸电机106时,对接抽吸电机106使存储于机器人清洁器集尘杯109中的碎屑被推入对接站集尘杯104中。然后,碎屑可以收集在对接站集尘杯104中以用于稍后丢弃。对接站集尘杯104可以被配置成使得在对接站集尘杯104变满之前(例如,对接站100的性能显著降低),对接站集尘杯104可以多处(例如,至少两次)从机器人清洁器集尘杯109接收碎屑。换句话说,可以配置对接站集尘杯104,使得在对接站集尘杯104变满之前可以数次清空机器人清洁器集尘杯109。
61.在一些情况下,机器人清洁器101可以被配置成执行一个或多个湿清洁操作(例如,使用拖把垫和/或流体分配泵)。另外或替代地,机器人清洁器101可以被配置成执行一个或多个真空清洁操作。
62.图2示出机器人清洁器集尘杯200的实例,所述机器人清洁器集尘杯200可以是图1的机器人清洁器集尘杯109的实例。如图所示,机器人清洁器集尘杯200包含集尘杯底座202、集尘杯顶部204,以及在集尘杯底座202与集尘杯顶部204之间延伸的一个或多个集尘杯侧壁206。机器人清洁器集尘杯入口208和机器人清洁器集尘杯出口210限定在一个或多个集尘杯侧壁206中的对应一个中。例如以及如图所示,机器人清洁器集尘杯入口208和机器人清洁器集尘杯出口210可以限定在相对的侧壁206中。
63.如图所示,碎屑鳍片212的至少一部分在朝向集尘杯底座202的方向(例如,横向于机器人清洁器集尘杯入口208的中心轴214的方向)上在集尘杯顶部204与集尘杯底座202之间的集尘杯空腔213内延伸。换句话说,碎屑鳍片212在横向于机器人清洁器集尘杯200的水平面的方向上延伸。因此,流过机器人清洁器集尘杯入口208(例如,在清洁操作期间)的空气进入到碎屑鳍片212的气流主体219上,从而导致朝向集尘杯底座202并且沿着气流主体219的气流表面216推动进入到其上的空气。气流主体219(例如,气流表面216)可以被配置成使夹带在流过气流表面216的空气内的纤维碎屑(例如,头发或细绳)被拉直(例如,解除缠结)。
64.碎屑鳍片212可以包含鳍片支架218。鳍片支架218被配置成将碎屑鳍片212连接到机器人清洁器集尘杯200。例如以及如图所示,鳍片支架218可以被配置成连接到集尘杯顶部204。气流主体219根据在气流主体219与集尘杯顶部204之间延伸的发散角θ在远离集尘杯顶部204并且朝向集尘杯底座202的方向上从鳍片支架218延伸。换句话说,发散角θ在由
鳍片支架218的安装表面220限定的平面(例如,水平面)与气流主体219之间延伸。发散角θ可以沿着碎屑鳍片212的长度恒定或不恒定。
65.图3示出碎屑鳍片300的透视图,所述碎屑鳍片300可以是碎屑鳍片212的实例。图4示出碎屑鳍片300的端视图。
66.如图所示,碎屑鳍片300包含鳍片支架302以及根据发散角β从鳍片支架302延伸的气流主体304。鳍片支架302限定安装表面303,所述安装表面被配置成接合机器人清洁器集尘杯,使得鳍片支架302可以连接到机器人清洁器集尘杯。气流主体304限定进入机器人清洁器集尘杯的空气进入到的气流表面306,以及与气流表面306相对的面向集尘杯顶部的表面308。在面向集尘杯顶部的表面308与由鳍片支架302的安装表面303限定的平面(例如,水平面)之间测量发散角β。在一些情况下,例如,发散角β可以测量为在20
°
到40
°
的范围内。
67.气流主体304限定与鳍片支架302间隔开的后边缘314,使得后边缘314处于气流主体304的最远端部分处。如图所示,后边缘314可以限定波形,例如方波形。换句话说,气流主体304可以包含通过延伸穿过气流主体304的多个切口312彼此间隔开的多个齿310。因此,气流主体304通常可以被描述为限定梳状物。由于纤维碎屑与齿310接合,因此可以使在齿310之间流动以及流过切口312的空气内夹带的纤维碎屑被拉直(例如,解除缠结)。
68.在两个相邻齿310之间延伸的切口宽度316可以例如测量为在5毫米(mm)到15mm的范围内。通过另外的实例,切口宽度316可以测量为10mm。在相应齿310的相对侧之间延伸的齿厚度318可以例如测量为在3mm到5mm的范围内。通过另外的实例,齿厚度318可以测量为3mm。在由相应齿310限定的后边缘314的部分与由相应切口312限定的后边缘314的部分之间延伸的齿长度320可以例如测量为在10mm到15mm的范围内。通过另外的实例,齿长度320可以测量为10mm。在气流主体304的最远端部分(例如,由相应齿310限定的后边缘314的部分)与鳍片支架302之间延伸的气流主体长度322可以例如测量为在25mm到40mm的范围内。
69.图5示出碎屑鳍片500的透视图,所述碎屑鳍片500可以是碎屑鳍片212的实例。图6示出碎屑鳍片500的透视端视图。
70.如图所示,碎屑鳍片500包含鳍片支架502以及从鳍片支架502延伸的气流主体504。鳍片支架502限定安装表面503,所述安装表面被配置成接合机器人清洁器集尘杯,使得鳍片支架502可以连接到机器人清洁器集尘杯。气流主体504限定进入机器人清洁器集尘杯的空气进入到的气流表面506,以及与气流表面506相对的面向集尘杯顶部的表面508。
71.气流主体504限定与鳍片支架502间隔开的后边缘510,使得后边缘510处于气流主体304的最远端部分处。如图所示,后边缘510可以限定波形,例如弯曲波形。换句话说,气流主体504可以包含一个或多个凹入区域512和一个或多个凸出区域514。如图所示,凹入区域512在多个凸出区域514之间延伸。在一些情况下并且如图所示,例如在图7中,凸出区域702可以在两个凹入区域704之间延伸,其中凸出区域702沿着气流主体706居中。
72.气流主体504可以是非平面的。例如,如图所示,气流主体504可以限定波形,例如弯曲波形。换句话说,气流主体504可以是波纹状的,使得气流表面506限定波形。因此,气流主体504可以包含两个或多于两个弯曲波形,其中第一弯曲波形在第一平面中延伸并且第二弯曲波形在第二平面中延伸,第一平面横向于(例如,垂直于)第二平面延伸。在这些情况下,气流主体504可以根据在面向集尘杯顶部的表面508与由鳍片支架502的安装表面503限定的平面(例如,水平面)之间测量到的非恒定发散角α从鳍片支架502延伸。例如,对应于一
个或多个凸出区域514的发散角α可以例如测量为在0
°
到30
°
的范围内,并且对应于一个或多个凹入区域512的发散角α的量度可以例如测量为在20
°
到40
°
的范围内。
73.对应于一个或多个凸出区域514的最大气流主体凸出长度516的度量(如从相应凸出区域514的最远端部分到鳍片支架502所测量)可以例如在30mm到40mm的范围内,并且对应于一个或多个凹入区域512的最大气流主体凹入长度518的度量(如从相应凸出区域512的最近端部分到鳍片支架502所测量)可以例如在25mm到40mm的范围内。
74.图8示出碎屑鳍片800的透视图,所述碎屑鳍片800可以是碎屑鳍片212的实例。图9示出碎屑鳍片800的端视图。
75.如图所示,碎屑鳍片800包含鳍片支架802以及根据发散角μ从鳍片支架802延伸的气流主体804。鳍片支架802限定安装表面803,所述安装表面被配置成接合机器人清洁器集尘杯,使得鳍片支架802可以连接到机器人清洁器集尘杯。气流主体804限定进入机器人清洁器集尘杯的空气进入到的气流表面806,以及与气流表面806相对的面向集尘杯顶部的表面808。在面向集尘杯顶部的表面808与由鳍片支架802的安装表面803限定的平面(例如,水平面)之间测量发散角μ。在一些情况下,例如,发散角μ可以测量为在20
°
到40
°
的范围中。
76.气流主体804可以包含从气流表面806延伸的一个或多个肋板810。例如,气流主体804可以包含一个、两个、三个、四个、五个、六个、七个、八个,和/或任何其它合适数目的肋板810。一个或多个肋板810通常沿着气流表面806平行于空气的流动方向延伸。当存在两个或多于两个肋板810时,肋板810可以沿着气流表面806彼此间隔开,使得由于例如与肋板810接合,沿着气流表面806移动的纤维碎屑被拉直。在一些情况下并且如图所示,两个或多于两个肋板810可以沿着气流主体804的主体纵轴812纵向间隔开,使得肋板810的肋板纵轴814横向于(例如,垂直于)主体纵轴812延伸。在一些情况下,当存在多个肋板810时,肋板810中的至少两个可以平行于彼此延伸。
77.一个或多个肋板810可以从气流主体804的后边缘816到鳍片支架802连续地延伸。在一些情况下,一个或多个肋板810中的一个或多个可以在鳍片支架802的至少一部分上方延伸。从后边缘816到鳍片支架802延伸的肋长818可以例如测量为在25mm到40mm的范围内。从气流主体804的气流表面806延伸的肋高820的度量可以在例如4mm到8mm的范围内。从气流主体804的最远端部分延伸到鳍片支架802的气流主体长度822可以测量为例如在25mm到40mm的范围内。
78.图10示出碎屑鳍片1000的透视图,所述碎屑鳍片1000可以是碎屑鳍片212的实例。如图所示,碎屑鳍片1000包含鳍片支架1002以及根据发散角γ从鳍片支架1002延伸的气流主体1004。鳍片支架1002限定安装表面1003,所述安装表面被配置成接合机器人清洁器集尘杯,使得鳍片支架1002可以连接到机器人清洁器集尘杯。气流主体1004限定进入机器人清洁器集尘杯的空气进入到的气流表面1006,以及与气流表面1006相对的面向集尘杯顶部的表面1008。在面向集尘杯顶部的表面1008与由鳍片支架1002的安装表面1003限定的平面(例如,水平面)之间测量发散角γ。在一些情况下,例如,发散角γ可以测量为在20
°
到40
°
的范围内。
79.如图所示,气流主体1004可以包含限定在气流表面1006中的一个或多个凹槽1010。一个或多个凹槽1010在横向于(例如,垂直于)主体纵轴1012的方向上沿着气流表面1006延伸。换句话说,一个或多个凹槽1010可以沿着气流表面1006大致平行于气流方向延
伸。
80.凹槽深度1014的度量可以随着距气流主体1004的后边缘1016的距离增加而减小。例如,凹槽深度1014的度量可以从邻近后边缘1016的位置处的3mm减小到邻近鳍片支架1002的位置处的1mm。另外或替代地,一个或多个凹槽1010可以具有测量为例如在2
°
到15
°
的范围内的凹槽锥角φ(如在对应凹槽1010的封闭底表面与相对开口端之间测量)。在一些情况下,凹槽深度1014可以沿着相应凹槽1010基本上恒定。在对应凹槽1010的相对侧之间延伸的凹槽宽度1018可以测量为例如在3mm到5mm的范围内。从后边缘1016且在沿着对应凹槽1010朝向鳍片支架1002的方向上延伸的凹槽长度1020可以测量为在例如5mm到35mm的范围内。当在气流表面1006中限定两个或更多个凹槽1010时,在相邻凹槽1010之间延伸的凹槽间隔1022可以测量为例如在3mm到10mm的范围内。
81.如图所示,气流主体1004可以限定沿着后边缘1016的至少一部分延伸的凸圆角1024。此配置可以导致沿着后边缘1016限定梳状物。与所得梳状物的齿相对应的齿长度可以至少部分地基于凹槽深度1014。
82.如可以了解,图2的碎屑鳍片212可以包含本文所描述的一个或多个特征,例如,关于图3到10描述的一个或多个特征的组合。例如以及如图11中所示,碎屑鳍片1100(其可以是碎屑鳍片212的实例)可以包含一个或多个凹槽1010以及一个或多个肋板810。
83.图12示出机器人清洁器集尘杯1200的透视图,所述机器人清洁器集尘杯可以是图2的机器人清洁器集尘杯200的实例。如图所示,机器人清洁器集尘杯1200包含集尘杯主体1202以及可移动地连接(例如,可枢转地连接)到集尘杯主体1202的可打开门1204,所述可打开门1204限定机器人清洁器集尘杯1200的顶部。机器人清洁器集尘杯1200可以包含在集尘杯主体1202内延伸的碎屑鳍片,例如,图2的碎屑鳍片212。
84.例如,如图13中所示(图13是沿着图12的线xiii-xiii截取的机器人清洁器集尘杯1200的实例的截面图),机器人清洁器集尘杯1200可以包含在机器人清洁器集尘杯1200的集尘杯空腔1301内延伸的图8的碎屑鳍片800。如图所示,碎屑鳍片800的气流主体804横向于机器人清洁器集尘杯入口1302的集尘杯入口中心轴1300延伸。因此,在一些情况下,碎屑鳍片800可以至少部分地阻塞机器人清洁器集尘杯入口1302的部分。在这些情况下,可以增加流过机器人清洁器集尘杯入口1302的空气的速度。
85.机器人清洁器集尘杯入口1302可以非垂直角度横向于集尘杯横轴1304延伸。因此,集尘杯入口中心轴1300以非垂直角度横向于集尘杯横轴1304延伸。此配置可以提高例如通过例如刷辊的旋转搅动器将碎屑推入机器人清洁器集尘杯入口1302中的能力。
86.如图所示,清理肋1310沿着机器人清洁器集尘杯入口1302的至少一部分延伸并且由机器人清洁器集尘杯1200的部分(例如,集尘杯主体1202或可打开门1204的部分)一体地形成。清理肋1310包含被配置成与机器人清洁器的搅动器接合的一个或多个清理齿1312。清理肋1310与搅动器之间的接合可以使缠结在搅动器周围的纤维碎屑(例如,头发或细绳)从其移除。一旦从搅动器移除,纤维碎屑可以穿过机器人清洁器集尘杯入口1302。穿过机器人清洁器集尘杯入口1302的纤维碎屑的至少一部分可以接合碎屑鳍片800。
87.还如图所示,机器人清洁器集尘杯1200可以包含邻近机器人清洁器集尘杯出口1308的导流器1306,其中机器人清洁器集尘杯出口1308和机器人清洁器集尘杯入口1302在机器人清洁器集尘杯1200的相对侧上。导流器1306被配置成在远离可打开门1204的方向上
推动进入到其上的空气。换句话说,导流器1306被配置成在机器人清洁器集尘杯出口1308的方向上推动进入的空气。例如,导流器1306可以包含空气进入到其上的一个或多个弯曲和/或成角表面,其中一个或多个弯曲和/或成角表面在朝向机器人清洁器集尘杯出口1308的方向上推动进入的空气。因此,导流器1306在远离可打开门1204的方向上延伸到机器人清洁器集尘杯1200中。
88.在一些情况下,导流器1306可以阻塞机器人清洁器集尘杯出口1308的至少一部分。因此,导流器1306可以增加流过机器人清洁器集尘杯出口1308的空气的速度。
89.图14示出从其移除可打开门1204的机器人清洁器集尘杯1200的俯视图。如图所示,碎屑鳍片800可以具有大体上对应于机器人清洁器集尘杯1200的内部形状的形状。例如以及如图所示,碎屑鳍片800的相对纵向端可以包含弯曲区域1400,所述弯曲区域对应于机器人清洁器集尘杯1200的对应内表面1402的曲率。
90.图15示出机器人清洁器集尘杯1500的另一实例的截面图,所述机器人清洁器集尘杯可以是图2的机器人清洁器集尘杯200的实例。如图所示,机器人清洁器集尘杯1500可以包含在机器人清洁器集尘杯出口1506与机器人清洁器集尘杯入口1508之间的位置处从机器人清洁器集尘杯1500的顶表面1504延伸的碎屑鳍片1502(其可以是图2的碎屑鳍片212的实例)。例如,碎屑鳍片1502可以从顶表面1504的中心区域(例如,对应于顶表面1504的表面积的中间10%、20%、30%、40%和/或50%的区域)延伸。气流主体长度1510的度量可以在例如5mm到10mm的范围内。
91.图16示出机器人清洁器集尘杯1500的另一截面图。如图所示,碎屑鳍片1502连接到顶表面1504,使得碎屑鳍片1502跨越限定顶表面1504的至少一部分的过滤器1600延伸。在一些情况下,碎屑鳍片1502可以连接到过滤器1600和/或从过滤器1600延伸(例如,连接到固持过滤器1600的框架)。
92.如图所示,碎屑鳍片1502可以跨越机器人清洁器集尘杯1500的整个机器人清洁器集尘杯空腔宽度1602延伸。或者,碎屑鳍片1502可以跨越机器人清洁器集尘杯1500的机器人清洁器集尘杯空腔宽度1602的仅一部分延伸。
93.图17示出具有碎屑鳍片1702的机器人清洁器集尘杯1700的截面图,所述机器人清洁器集尘杯可以是图2的机器人清洁器集尘杯200的实例,所述碎屑鳍片可以是图2的碎屑鳍片212的实例。如图所示,碎屑鳍片1702在机器人清洁器集尘杯1700的集尘杯空腔1704内延伸。碎屑鳍片1702包含鳍片支架1706以及从鳍片支架1706延伸的气流主体1708。鳍片支架1706被配置成将碎屑鳍片1702连接到机器人清洁器集尘杯1700(例如,连接到机器人清洁器集尘杯1700的顶部部分,例如可打开门1710)。气流主体1708限定碎屑鳍片1702的气流表面1712的至少一部分。在一些情况下,鳍片支架1706可以限定气流表面1712的至少一部分。因此,在一些情况下,鳍片支架1706和气流主体1708的至少一部分一般可以被描述为限定碎屑鳍片1702的气流表面1712。气流主体1708可以被配置成从鳍片支架1706延伸,以在空气从鳍片支架1706过渡到气流主体1708时促进沿着气流表面1712流动的空气的平滑过渡。例如,鳍片支架1706和气流主体1708可以沿着气流表面1712限定至少一个弯曲区域。
94.图18示出碎屑鳍片1702的透视图。如图所示,碎屑鳍片1702包含具有从其延伸的一个或多个清理齿1802的清理肋1800。清理齿1802被配置成接合机器人清洁器的搅动器(例如,刷辊),使得可以从其移除缠结在搅动器周围的纤维碎屑的至少一部分(例如,头发
或细绳)。
95.清理肋1800可以直接连接到碎屑鳍片1702的部分或由碎屑鳍片1702的部分一体地形成。如图所示,清理肋1800由鳍片支架1706一体地形成,使得清理齿1802在集尘杯空腔1704的外部。因此,当机器人清洁器的搅动器旋转时,清理齿1802与搅动器的至少一部分接合(例如,从搅动器的主体延伸的刷毛和/或翻板)。当相较于例如直接连接到机器人清洁器集尘杯1700(例如,连接到机器人清洁器集尘杯1700的集尘杯主体或可打开门),清理肋1800连接到碎屑鳍片1702或由碎屑鳍片1702一体地形成时,可以减小由机器人清洁器的操作产生的声音(例如,由于搅动器接触清理肋产生的声音)。另外或替代地,将清理肋1800直接连接到碎屑鳍片1702的部分或由碎屑鳍片1702的部分一体地形成清理肋1800可以减少将振动传输到机器人清洁器集尘杯1700。
96.在一些情况下,清理齿1802可以具有多个齿长度1804。例如,从清理肋1800的中心部分1806延伸的清理齿1802的齿长度1804可以测量为大于从清理肋1800的横向部分1808和1810延伸的清理齿1802的齿长度1804。
97.清理肋1800的梳状物长度1812可以测量为小于对应的碎屑鳍片宽度1814。梳状物长度1812一般可以被描述为对应于清理肋1800的两个最远端清理齿1802之间的分离距离。
98.在一些情况下,密封件1816可以沿着鳍片支架1706的部分延伸。可以定位密封件1816,使得当碎屑鳍片1702连接到机器人清洁器集尘杯1700时,密封件1816在鳍片支架1706与机器人清洁器集尘杯1700的部分之间延伸。当与不含密封件1816的实施例相比时,密封件1816可以减小由于碎屑鳍片1702中的振动产生的声音。
99.图19a示出沿着图18的线xix-xix截取的碎屑鳍片1702的透视截面图。碎屑鳍片1702可以包含沿着鳍片支架1706的至少一部分和/或气流主体1708的至少一部分延伸(例如,沿着仅鳍片支架1706的至少一部分、仅气流主体1708的至少一部分,或鳍片支架1706和气流主体1708两者的至少一部分延伸)的覆盖物1900。覆盖物1900可以被配置成使得沿着碎屑鳍片1702流动的空气沿着覆盖物1900的至少一部分延伸。例如,在沿着碎屑鳍片1702流动的空气内夹带的碎屑可以进入到覆盖物1900的部分上。因此,覆盖物1900可以被配置成吸收进入到其上的碎屑中的动能的至少一部分。这可以减少由碎屑撞击碎屑鳍片1702产生的声音的强度(例如,增加覆盖物1900的顺应性可以减少声音产生)。例如,覆盖物1900可以是弹性材料,例如橡胶、硅酮、热塑性聚氯基甲酸酯(tpu),和/或任何其它弹性材料。通过另外的实例,覆盖物1900可以是具有肖氏40a硬度的热塑性聚氯基甲酸酯。覆盖物1900的质量还可以减小由碎屑撞击碎屑鳍片1702和/或由通过在其上方流动的空气在碎屑鳍片1702中引发的振动产生的声音的强度。例如,随着覆盖物1900的质量增加,可以减少由碎屑撞击碎屑鳍片1702和/或由通过在其上方流动的空气在碎屑鳍片1702中引发的振动产生的声音的总量。因此,覆盖物1900一般可以被描述为被配置成提供声学和/或振动抑制。
100.覆盖物1900可以使用粘合剂、机械连接(例如,螺钉、压配合、卡扣配合,和/或任何其它类型的机械连接),和/或任何其它形式的连接中的一个或多个连接到碎屑鳍片1702。例如,在一些情况下,覆盖物1900包覆模制在碎屑鳍片1702的至少一部分上。在这些情况下,碎屑鳍片1702可以包含一个或多个开口(例如,覆盖物通路)1902(还参看图19b),覆盖物1900的部分可以延伸穿过所述开口。例如以及如图所示,覆盖物1900可以延伸穿过一个或多个开口1902中的至少一个,使得覆盖物1900限定密封件1816的至少一部分。另外或替
代地,一个或多个开口1902中的至少一个可以被配置成通过形成例如在覆盖物1900与一个或多个开口1902之间的机械互锁的一部分来将覆盖物1900连接到碎屑鳍片1702(例如,在鳍片支架1706和/或气流主体1708处)。在一些情况下,覆盖物1900可以安置于限定在鳍片支架1706和/或气流主体1708中的一个或多个内的覆盖物插口1950(还参看图19b)内。
101.如图19b中所示,横向部分1808和1810内的清理齿1802可以相对于中心部分1806内的清理齿1802成角度。在一些情况下,在横向部分1808和1810中的每一个中的清理齿1802可以包含侧角ω和扭转角ψ。可以在相应清理齿1802的平面侧表面1952与垂直于相应清理齿1802从其延伸的表面1956延伸的牙根轴线1954之间测量侧角ω。可以在相应清理齿1802的平面侧表面1952与中心齿轴线1958之间测量扭转角ψ,所述中心齿轴线大体上平行于中心部分1806内的最中心清理齿1802的对应平面侧表面1952延伸。例如,侧角ω可以被配置成使得横向部分1808和1810的清理齿1802以距表面1956增加的距离从中心部分1806发散,并且扭转角ψ可以被配置成使得横向部分1808和1810的清理齿1802朝向中心部分1806(例如,在搅动器的方向上)聚合。
102.图20示出具有碎屑鳍片2002的机器人清洁器集尘杯2000的截面图,所述机器人清洁器集尘杯可以是图2的机器人清洁器集尘杯200的实例,所述碎屑鳍片可以是图2的碎屑鳍片212的实例。如图所示,碎屑鳍片2002在机器人清洁器集尘杯2000的集尘杯空腔2004内延伸。碎屑鳍片2002包含鳍片支架2006以及从鳍片支架2006延伸的气流主体2008。鳍片支架2006被配置成将碎屑鳍片2002连接到机器人清洁器集尘杯2000(例如,连接到机器人清洁器集尘杯2000的顶部部分,例如可打开门2010)。气流主体2008限定碎屑鳍片2002的气流表面2014的至少一部分。在一些情况下,鳍片支架2006可以限定气流表面2014的至少一部分。因此,在一些情况下,鳍片支架2006和气流主体2008的至少一部分一般可以被描述为限定碎屑鳍片2002的气流表面2014。气流主体2008可以被配置成从鳍片支架2006延伸,以在空气从鳍片支架2006过渡到气流主体2008时促进沿着气流表面2014流动的空气的平滑过渡。例如,鳍片支架2006和气流主体2008可以沿着气流表面2014限定至少一个弯曲区域。
103.如图所示,碎屑鳍片2002可以包含在其上延伸的一个或多个肋板2012。肋板2012可以从鳍片支架2006和/或气流主体2008中的一个或多个延伸。例如,一个或多个肋板2012可以从气流主体2008的后边缘2016以及沿着鳍片支架2006的至少一部分连续地延伸。
104.图21示出碎屑鳍片2002的透视图。如图所示,碎屑鳍片2002包含具有从其延伸的一个或多个清理齿2102的清理肋2100。清理齿2102被配置成接合机器人清洁器的搅动器(例如,刷辊),使得可以从其移除缠结在搅动器周围的纤维碎屑的至少一部分(例如,头发或细绳)。
105.清理肋2100可以直接连接到碎屑鳍片2002的部分或由碎屑鳍片2002的部分一体地形成。如图所示,清理肋2100由鳍片支架2006一体地形成,使得清理齿2102在集尘杯空腔2004的外部。因此,当机器人清洁器的搅动器旋转时,清理齿2102与搅动器的至少一部分接合(例如,从搅动器的主体延伸的刷毛和/或翻板)。当相较于例如直接连接到机器人清洁器集尘杯2000(例如,连接到机器人清洁器集尘杯2000的集尘杯主体或可打开门),清理肋2100连接到碎屑鳍片2002或由碎屑鳍片2002一体地形成时,可以减小由机器人清洁器的操作产生的声音(例如,由于搅动器接触清理肋产生的声音)。另外或替代地,将清理肋2100直接连接到碎屑鳍片2002的部分或由碎屑鳍片2002的部分一体地形成清理肋2100可以减少
将振动传输到机器人清洁器集尘杯2000。
106.在一些情况下,清理齿2102可以具有多个齿长度2104。例如,从清理肋2100的中心部分2106延伸的清理齿2102的齿长度2104可以测量为大于从清理肋2100的横向部分2108和2110延伸的清理齿2102的齿长度2104。
107.清理肋2100的梳状物长度2112可以测量为小于对应的碎屑鳍片宽度2114。梳状物长度2112一般可以被描述为对应于清理肋2100的两个最远端清理齿2102之间的分离距离。
108.在一些情况下,密封件2116可以沿着鳍片支架2006的部分延伸。可以定位密封件2116,使得当碎屑鳍片2002连接到机器人清洁器集尘杯2000时,密封件2116在鳍片支架2006与机器人清洁器集尘杯2000的部分之间延伸。当与不含密封件2116的实施例相比时,密封件2116可以减小由于碎屑鳍片2002中的振动产生的声音。
109.图22示出沿着图21的线xxii-xxii截取的碎屑鳍片2002的透视截面图。碎屑鳍片2002可以包含沿着鳍片支架2006的至少一部分和/或气流主体2008的至少一部分延伸(例如,沿着仅鳍片支架2006的至少一部分、仅气流主体2008的至少一部分,或鳍片支架2006和气流主体2008两者的至少一部分延伸)的覆盖物2200。覆盖物2200可以被配置成使得沿着碎屑鳍片2002流动的空气沿着覆盖物2200的至少一部分延伸。例如,在沿着碎屑鳍片2002流动的空气内夹带的碎屑可以进入到覆盖物2200的部分上。因此,覆盖物2200可以被配置成吸收进入到其上的碎屑中的动能的至少一部分。这可以减少由碎屑撞击碎屑鳍片2002产生的声音的强度(例如,增加覆盖物2200的顺应性可以减少声音产生)。例如,覆盖物2200可以是弹性材料,例如橡胶、硅酮、热塑性聚氯基甲酸酯(tpu),和/或任何其它弹性材料。通过另外的实例,覆盖物2200可以是具有肖氏40a硬度的热塑性聚氯基甲酸酯。覆盖物2200的质量还可以减小由碎屑撞击碎屑鳍片2002和/或由通过在其上方流动的空气在碎屑鳍片1702中引发的振动产生的声音的强度。例如,随着覆盖物2200的质量增加,可以减少由碎屑撞击碎屑鳍片2002和/或由通过在其上方流动的空气在碎屑鳍片1702中引发的振动产生的声音的总量。因此,覆盖物2200一般可以被描述为被配置成提供声学和/或振动抑制。
110.覆盖物2200可以使用粘合剂、机械连接(例如,螺钉、压配合、卡扣配合,和/或任何其它类型的机械连接),和/或任何其它形式的连接中的一个或多个连接到碎屑鳍片2002。例如,在一些情况下,覆盖物2200包覆模制在碎屑鳍片2002的至少一部分上。在这些情况下,碎屑鳍片2002可以包含一个或多个开口2202(还参看图23),覆盖物2200的部分可以延伸穿过所述开口。例如以及如图所示,覆盖物2200可以延伸穿过一个或多个开口(例如,覆盖物通路)2202中的至少一个,使得覆盖物2200限定密封件2116的至少一部分。另外或替代地,一个或多个开口2202中的至少一个可以被配置成通过形成例如在覆盖物2200与一个或多个开口2202之间的机械互锁的一部分来将覆盖物2200连接到碎屑鳍片2002(例如,在鳍片支架2006和/或气流主体2008处)。
111.还如图23中所示,横向部分2108和2110内的清理齿2102可以相对于中心部分2106内的清理齿2102成角度。在一些情况下,在横向部分2108和2110中的每一个中的清理齿2102可以包含侧角ξ和扭转角ε。可以在相应清理齿2102的平面侧表面2300与垂直于相应清理齿2102从其延伸的表面2304延伸的牙根轴线2302之间测量侧角ξ。可以在相应清理齿2102的平面侧表面2300与中心齿轴线2306之间测量扭转角ε,所述中心齿轴线大体上平行于中心部分2106内的最中心清理齿2102的对应平面侧表面2300延伸。例如,侧角ξ可以被配
置成使得横向部分2108和2110的清理齿2102以距表面2304增加的距离从中心部分2106发散,并且扭转角ε可以被配置成使得横向部分2108和2110的清理齿2102在搅动器的方向上朝向中心部分2106聚合。
112.图24示出碎屑鳍片2002的透视图。如图所示,覆盖物2200沿着鳍片支架2006和气流主体2008的至少一部分延伸。覆盖物2200被配置成至少部分地围绕肋板2012延伸。在一些情况下,覆盖物2200可以安置于限定在鳍片支架2006和/或气流主体2008中的一个或多个内的覆盖物插口2400(还参看图23)内。
113.图25示出碎屑鳍片2500的俯视透视图,以及图26示出碎屑鳍片2500的仰视透视图,其中碎屑鳍片2500可以是图2的碎屑鳍片212的实例。如图所示,碎屑鳍片2500包含鳍片支架2502以及从鳍片支架2502延伸的气流主体2504。碎屑鳍片2500限定沿着气流主体2504和/或鳍片支架2502的至少一部分延伸的气流表面2506。进入碎屑鳍片2500在其内延伸的集尘杯的空气进入到气流表面2506上并且沿着气流表面2506流动。
114.如图所示,碎屑鳍片2500可以进一步包含清理肋2508。清理肋2508沿着碎屑鳍片2500的至少一部分延伸。例如,清理肋2508可以沿着碎屑鳍片2500的前边缘2510延伸,使得清理肋2508的接合区域2511与搅动器接合(例如,接触)。前边缘2510与后边缘2512相对并且比后边缘2512更靠近碎屑鳍片2500在其内延伸的集尘杯的入口定位。清理肋2508可以进一步包含平台2516,所述平台沿着清理肋2508延伸并且与清理肋2508的接合区域2511间隔开。例如,平台2516可以沿着清理肋2508的清理肋顶表面2517的至少一部分延伸,其中清理肋顶表面2517面向碎屑鳍片2500在其内延伸的集尘杯的顶部。如图所示,平台2516可以连接到清理肋2508的齿2519(或清理齿)。这类配置可以减轻齿2519中引发的振动和/或由于齿2519与搅动器之间的接合产生的声音。换句话说,平台2516一般可以被描述为提供声音和/或振动抑制。另外或替代地,平台2516可以减少截留在清理肋2508的齿2519之间的碎屑量。
115.覆盖物2514可以沿着气流表面2506的至少一部分延伸。覆盖物2514可以被配置成提供声音和/或振动抑制。在一些情况下,覆盖物2514的部分可以沿着清理肋2508的平台2516延伸。例如,平台2516可以限定用于接纳覆盖物2514的至少一部分的插口。通过另外的实例,覆盖物2515可以限定平台2516。在这个实例中,覆盖物2514可以直接接触清理肋2508的齿2519。在一些情况下,覆盖物2514可以是单件或多件结构。例如,覆盖物2514可以包覆模制在碎屑鳍片2500的至少一部分上。
116.如图所示,气流主体2504包含第一平面区域2518和第二平面区域2520。第一平面区域2518朝向第二平面区域2520延伸,其中第一平面区域2518和第二平面区域2520在顶点2522处相交。顶点2522与第一平面区域2518和第二平面区域2520的相应远端2524和2526竖直地且水平地间隔开。因此,第一平面区域2518和第二平面区域2520限定相交角γ。相交角γ可以测量为例如在100
°
到170
°
的范围内。通过另外的实例,相交角γ可以测量为在130
°
到175
°
的范围内。顶点2522可以沿着碎屑鳍片2500的纵向长度2528居中地定位。
117.平面区域2518和2520可以具有大体上三角形形状,其中每个三角形的顶点限定在远端2524和2526处,并且三角形的底边限定在顶点2522处。然而,平面区域2518和2520可以具有任何形状。举例来说,平面区域2518和2520可以具有矩形形状、梯形形状,或任何其它形状。
118.图27示出碎屑鳍片2500的侧视图,其中示出后边缘2512。如图所示,第一平面区域2518和第二平面区域2520限定沿着后边缘2512的至少一部分延伸的v形形状(或三角波形状)。还如图所示,v形形状的v形深度2700随着距后边缘2512的距离增加而减小。因此,v形深度2700在后边缘2512处测量为最大。v形形状可以将碎屑鳍片2500对碎屑鳍片2500在其内延伸的集尘杯的入口的阻塞最小化,同时仍允许碎屑鳍片2500促进拉直进入到其上的空气内夹带的纤维碎屑。将入口阻塞最小化可以促进增加的气流进入集尘杯中和/或促进碎屑更容易地移动到集尘杯中(例如,减少堵塞集尘杯的入口的风险)。此配置可以进一步允许碎屑累积在碎屑鳍片2500的面向集尘杯顶部的表面2702上,这可以改进集尘杯的存储容量。面向集尘杯顶部的表面2702与气流表面2506相对。
119.图28示出碎屑鳍片2500的俯视图。如图所示,随着后边缘2512接近顶点2522,在后边缘2512与前边缘2510之间延伸的分离距离2800增加。
120.图29示出碎屑鳍片2500的截面透视端视图。如图所示,平台2516沿着清理肋2508延伸。平台2516被配置成使得覆盖物2514可以在其上延伸。覆盖物2514可以被配置成增加平台2516的质量,从而提供声音和/或振动抑制。
121.图30示出碎屑鳍片2500的截面透视图。如图所示,覆盖物2514是单件结构,其中覆盖物2514的第一部分沿着气流表面2506延伸并且覆盖物2514的第二部分沿着平台2516延伸。因此,碎屑鳍片2500可以包含一个或多个覆盖物通路3000,覆盖物2514的部分延伸穿过所述覆盖物通路。
122.如本文所论述,碎屑鳍片212可以包含本文关于碎屑鳍片212的实例中的一个或多个所论述的特征的任何组合。例如,碎屑鳍片212可以包含覆盖物、清理肋、气流主体或表面设计/特征,和/或本文所论述的任何其它特征的任何组合。此外,机器人清洁器集尘杯200可以包含本文关于机器人清洁器集尘杯200的实例中的一个或多个所论述的特征的任何组合。
123.根据本公开的机器人清洁器集尘杯的碎屑鳍片的实例可以包含鳍片支架以及根据发散角从鳍片支架延伸的气流主体,所述气流主体限定气流表面,所述气流主体被配置成拉直进入到其上的空气内夹带的纤维碎屑。
124.在一些情况下,气流主体可以包含从气流表面延伸的一个或多个肋板。在一些情况下,气流主体可以包含限定在气流表面中的一个或多个凹槽。在一些情况下,气流主体的后边缘可以限定波形。在一些情况下,波形可以是方波。在一些情况下,波形可以是弯曲波。在一些情况下,气流主体可以是非平面的。在一些情况下,碎屑鳍片可以进一步包含覆盖物,所述覆盖物沿着气流主体的至少一部分延伸。在一些情况下,碎屑鳍片可以进一步包含清理肋。
125.根据本公开的机器人清洁器的集尘杯的实例可以包含集尘杯顶部、集尘杯底座、在集尘杯顶部与集尘杯底座之间延伸的一个或多个侧壁,以及碎屑鳍片,所述碎屑鳍片的至少一部分在集尘杯顶部与集尘杯底座之间且在集尘杯底座的方向上延伸,所述碎屑鳍片包含限定气流表面的气流主体,所述气流主体被配置成拉直进入到其上的空气内夹带的纤维碎屑。
126.在一些情况下,集尘杯可以进一步包含限定在一个或多个侧壁中的对应一个中的机器人清洁器集尘杯入口。在一些情况下,气流主体可以横向于机器人清洁器集尘杯入口
的中心轴延伸。在一些情况下,集尘杯可以进一步包含限定在一个或多个侧壁中的对应一个中的机器人清洁器集尘杯出口。在一些情况下,集尘杯可以进一步包含邻近机器人清洁器集尘杯出口的导流器,所述导流器被配置成在远离集尘杯顶部的方向上推动进入到其上的空气。在一些情况下,碎屑鳍片可以包含从气流表面延伸的一个或多个肋板。在一些情况下,碎屑鳍片可以包含限定在气流表面中的一个或多个凹槽。在一些情况下,碎屑鳍片的后边缘可以限定波形。在一些情况下,波形可以是方波。在一些情况下,波形可以是弯曲波。在一些情况下,碎屑鳍片可以是非平面的。在一些情况下,碎屑鳍片可以进一步包含覆盖物,所述覆盖物沿着气流主体的至少一部分延伸。在一些情况下,碎屑鳍片可以包含清理肋。
127.根据本公开的清洁系统的实例可以包含对接站以及机器人清洁器,所述机器人清洁器被配置成流体连接到对接站。机器人清洁器可以包含机器人清洁器集尘杯。机器人清洁器集尘杯可以包含集尘杯主体、可移动地连接到集尘杯主体的可打开门,以及在集尘杯主体内延伸的碎屑鳍片,所述碎屑鳍片包含限定气流表面的气流主体,所述气流主体被配置成拉直进入到其上的空气内夹带的纤维碎屑。
128.在一些情况下,机器人清洁器集尘杯可以包含机器人清洁器集尘杯入口。在一些情况下,气流主体可以横向于机器人清洁器集尘杯入口的中心轴延伸。在一些情况下,机器人清洁器集尘杯可以包含机器人清洁器集尘杯出口。在一些情况下,机器人清洁器集尘杯可以包含导流器,所述导流器被配置成在远离可打开门的方向上推动进入其上的空气。在一些情况下,碎屑鳍片可以包含从气流表面延伸的一个或多个肋板。在一些情况下,碎屑鳍片可以包含限定在气流表面中的一个或多个凹槽。在一些情况下,碎屑鳍片的后边缘可以限定波形。在一些情况下,波形可以是方波。在一些情况下,波形可以是弯曲波。在一些情况下,碎屑鳍片可以是非平面的。
129.根据本公开的机器人清洁器的集尘杯的另一实例可以包含集尘杯顶部、集尘杯底座、在集尘杯顶部与集尘杯底座之间延伸的一个或多个侧壁,以及导流器,所述导流器被配置成在远离集尘杯顶部的方向上推动进入到其上的空气。
130.根据本公开的机器人清洁器集尘杯的碎屑鳍片的另一实例可以包含:鳍片支架;根据发散角从鳍片支架延伸的气流主体,所述气流主体限定气流表面,所述气流主体被配置成拉直进入到其上的空气内夹带的纤维碎屑;以及覆盖物,所述覆盖物沿着鳍片支架和/或气流主体中的一个或多个的至少一部分延伸。
131.在一些情况下,气流主体可以包含从气流表面延伸的一个或多个肋板。在一些情况下,气流主体可以包含限定在气流表面中的一个或多个凹槽。在一些情况下,气流主体的后边缘可以限定波形。在一些情况下,波形可以是方波。在一些情况下,波形可以是弯曲波。在一些情况下,气流主体可以是非平面的。
132.虽然本文中已经描述本发明的原理,但本领域技术人员将理解,此描述仅借助于实例进行且并不作为关于本发明的范围的限制。除本文中示出且描述的示例性实施例之外,其它实施例也预期在本发明的范围内。由本领域一般技术人员进行的修改和替代被认为在本发明的范围内,本发明的范围不受除以下权利要求书外的其它限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
