1.本发明涉及半导体技术中的晶圆加工领域,尤其是晶圆与工作台对准识别方法。
背景技术:
2.在对晶圆上的太鼓环(太鼓环与晶圆是共轴的)进行环切加工时,是将晶圆固定在工作台上后,工作台自转带动晶圆转动以进行切割。为了保证太鼓环切割形状的精度,使晶圆与工作台对准(工作台与晶圆保持共轴状态)是前提条件。因此,将晶圆放置在工作台上后,通常采用定心机械手调整晶圆的位置以使晶圆与工作台尽可能保持共轴状态。
3.但是在实际调整时,很难使晶圆与工作台达到理想的共轴状态,这就造成:在后续工作台自转过程中,切刀按照预定的切割参数切割时,无法切割出预想的圆形。
技术实现要素:
4.本发明的目的就是为了解决现有技术中存在的上述问题,提供一种晶圆与工作台对准识别方法。
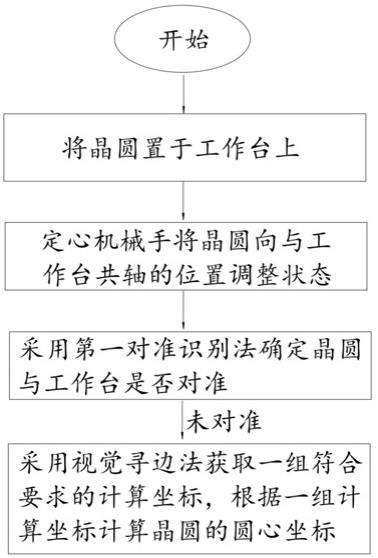
5.本发明的目的通过以下技术方案来实现:晶圆与工作台对准识别方法,包括如下步骤:s1,将一晶圆置于工作台上,所述工作台上设置有一组轴线与所述工作台的轴线平行的基准孔,所述基准孔的数量大于3且当晶圆与工作台处于共轴状态时,所述晶圆的太鼓环的外圆周位于每个所述基准孔处;s2,通过定心机械手使所述晶圆向与工作台共轴的位置调整;s3,采用第一对准识别法确定所述晶圆与工作台是否对准,当确定所述工作台与晶圆未对准时,执行s4;s4,采用视觉寻边法在每个基准孔处分别获取一计算坐标,在获取一组符合要求的计算坐标后根据一组所述计算坐标确定所述晶圆的圆心坐标。
6.优选的,所述基准孔为四个且所述工作台的轴线到四个基准孔的轴线的距离相同,任一基准孔的轴线到工作台的轴线的距离与所述太鼓环的外圆周的半径相当。
7.优选的,所述工作台由驱动装置驱动自转,所述工作台转动使一组所述基准孔依次与位置固定的光源位置对应。
8.优选的,所述s3中,所述第一对准识别法通过图像采集装置采集每个所述基准孔的图像;所述图像采集装置的镜头的光轴与工作台的轴线平行;若在一基准孔处未获取到目标图像,确定晶圆与工作台未对准;若在一基准孔处获取到一张目标图像,获取该目标图像拍摄时的镜头位置坐标,所述镜头位置坐标是该目标图像拍摄时,镜头的光轴上的选定点在预设坐标系中的坐标;在每个所述基准孔处均获得一个镜头位置坐标后,核对几个所述镜头位置坐标是否准确,若准确,确定晶圆与工作台对准;反之,确定晶圆与工作台未对准。
9.优选的,所述目标图像是所述基准孔内局部区域的图像,其上包括呈直线的黑白
分界线,所述黑白分界线紧邻所述目标图像的中心或过所述目标图像的中心。
10.优选的,在核对几个镜头位置坐标是否准确时,是根据几个镜头位置坐标求出几个圆的半径,将求出的几个半径的最大值与最小值进行比较,若它们的差值小于第一误差阈值,则确认几个镜头位置坐标准确;反之,确认几个镜头位置坐标不准确。
11.优选的,所述s4中,采用视觉寻边法在一个基准孔处获取一计算坐标时,图像采集装置的镜头的光轴根据二分法沿第一直线的延伸方向在设定范围内移动,所述第一直线与所述工作台的轴线及所述基准孔的轴线垂直且相交;所述设定范围涵盖所述基准孔;图像采集装置每次根据二分法移动一个位置后采集图像,当根据图像采集装置在一位置处采集的图像确定所述镜头的光轴在图像上的对应点位于所述图像上的黑白分界线位置时,获取此图像拍摄时,所述镜头的光轴上的选定点在预设坐标系中的坐标并将该坐标作为计算坐标。
12.优选的,所述s4中,获取一组计算坐标后,求出一组圆的半径,将求出的一组半径的最大值与最小值进行比较,若它们的差值小于第二误差阈值,则确认一组计算坐标符合要求;反之,确认一组计算坐标不符合要求,若确认一组计算坐标不符合要求,则重新获取一组计算坐标并再次确认它们是否符合要求,直到确认一组计算坐标符合要求为止。
13.优选的,所述s4中,将求出的一组所述圆中,半径最小的所述圆的中心坐标作为所述晶圆的圆心坐标。
14.优选的,所述预设坐标系是至少由垂直于所述工作台的轴线且相互垂直的两条数轴构造而成的坐标系。
15.本发明技术方案的优点主要体现在:本方案先采用第一对准识别法,能够快速确定晶圆与工作台是否对准,从而保证加工效率,在确认晶圆与工作台未对准后,转视觉寻边法寻找一组计算坐标,可以有效地确定晶圆的圆心坐标,为后续调整切割参数提供了数据支持,有利于保证切割质量,整个过程将加工效率与切割质量有效的结合。
16.本方案在第一对准识别法中采集图像时使镜头移动与基准孔共轴的位置并在基准孔的轴线附件采集图像,便于尽快地找到相应的目标图像,有利于提高工作效率。
17.在确定4个计算坐标后对4个计算坐标进行核算,从而能够有效地保证最终计算的晶圆的圆心坐标精度。
附图说明
18.图1是本发明的方法中,晶圆调整至与工作台尽可能同心状态的示意图(图中隐去了晶圆中位于太鼓环外围的薄膜及外框);图2是本发明的方法过程示意图;图3是图1中q区域的放大图;图4是本发明的s4中,镜头的光轴在工作台的台面的中心及晶圆的边缘范围内移动的示意图(图中短线条围成的圆形虚线区域为工作台)。
具体实施方式
19.本发明的目的、优点和特点,将通过下面优选实施例的非限制性说明进行图示和
解释。这些实施例仅是应用本发明技术方案的典型范例,凡采取等同替换或者等效变换而形成的技术方案,均落在本发明要求保护的范围之内。
20.在方案的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“前”、“后”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。并且,在方案的描述中,以操作人员为参照,靠近操作者的方向为近端,远离操作者的方向为远端。
21.下面结合附图对本发明揭示的晶圆与工作台对准识别方法进行阐述,所述识别方法是基于已知的环切工位,所述环切工位通常包括工作台1、定心机械手(图中未示出)等。如附图1所示,所述工作台1为圆柱形且其台面的直径略大于晶圆3的太鼓环4的外经。所述定心机械手可以采用三爪定心卡盘对所述晶圆3的位置进行调整以使所述晶圆3尽可能调整到与工作台1共轴的状态。虽然定心机械手能够尽可能地将所述晶圆3调整至与工作台1共轴的状态,但是,由于各种加工误差、安装误差等,调整后,所述晶圆3的轴线与工作台1的轴线仍然可能存在一定的偏差,因此,需要在环切前确定所述晶圆3与工作台1的对准状态。
22.如附图1所示,为了便于所述识别方法的实现,在所述工作台1上设置有一组基准孔5,所述基准孔5的数量大于3且每个基准孔5的轴线与所述工作台1的轴线平行,当所述晶圆3与工作台1处于共轴状态时,所述晶圆3的太鼓环4的外圆周位于每个所述基准孔5处。所述基准孔5的具体数量可以根据需要来设计,本实施例中,所述基准孔5为四个,四个所述基准孔5的轴线到所述工作台1的轴线的距离相等,并且,任一所述基准孔5的轴线到所述工作台的轴线的距离与所述太鼓环4的外圆周的半径相当,即四个所述基准孔呈正方形分布。
23.所述环切工位还包括照向所述基准孔5的光源(图中未示出),优选的实施例中,所述光源为一处且位置固定的设置在所述工作台1的下方,其亮度可以根据需要进行调节。所述工作台1由驱动装置驱动自转,所述工作台1转动使四个所述基准孔5依次与所述光源位置对应,优选每个所述基准孔5可以转动至与所述光源正对。当一个基准孔5与所述光源位置对应时,所述光源的光线能够穿过所述基准孔5,这样的结构能够尽可能地减少光源及简化驱动视觉采集装置移动的移动结构。当然,在其他实施例中,所述光源也可以是设置在多处,每处光源与一个基准孔5位置对应,此时,在后续进行图像采集时,所述工作台1可以不用转动使基准孔5依次与光源对应。
24.所述环切工位还包括图像采集装置(图中未示出),所述图像采集装置可以采用已知的各种摄像头、ccd、相机等,优选的,所述图像采集装置为已知的具有图像采集功能的照相显微镜,所述图像采集装置设置在所述工作台1的上方且连接驱动其至少进行平移(沿垂直于工作台1的轴线方向移动)的移动结构(图中未示出),所述图像采集装置的镜头朝向所述工作台1,且所述镜头的光轴与所述工作台1的轴线平行。
25.在实际对准识别时,本方法先采用第一对准识别法进行晶圆3与工作台1的对准状态的快速识别,在第一对准识别法确定晶圆3与工作台1未对准时,再采用视觉寻边法以获取晶圆3的圆心坐标,从而便于后续根据圆心坐标调整切割参数,这样既提高了效率,同时能够有效保证后续环切加工的质量。
26.如附图2所示,所述识别方法具体包括如下步骤:
s1,将所述晶圆3置于所述工作台1上;具体实施时,可通过上料机械手将料盒内的晶圆3移动至工作台1上;当然,在其他实施例中,也可以采用人工上料的方式,将所述晶圆3放置到工作台1上。
27.s2,通过所述定心机械手将所述晶圆3调整至与工作台1尽可能共轴的状态后,将所述晶圆3位置固定,晶圆3的固定可以通过真空吸附来实现,也可以在真空吸附的基础上,通过下压件压在晶圆3的外框上,从而将所述晶圆3压在工作台1上。当然,晶圆3的固定也可以在对准识别之后再进行。
28.通常来说,定心机械手将所述晶圆3调整后,所述晶圆3的太鼓环4的外圆周位于四个所述基准孔5处且遮盖每个所述基准孔5的部分区域。当然,在一些特殊情况下,也可能存在一个基准孔5完全位于所述太鼓环4的外圆周的内侧,或一个基准孔5完全位于所述太鼓环4的外圆周的外侧的情况。
29.当每个基准孔5的第一部分位于所述太鼓环4的外圆周内侧,第二部分位于所述太鼓环4的外圆周外侧时,在与基准孔5对应的光源点亮时,第一部分由于被所述晶圆3的不透光的区域遮盖不能透光,从而在图像上呈现为黑色;第二部分虽然被太鼓环4外侧的薄膜2遮盖,但是薄膜2能够透光,从而在图像上接近白色,进而,在一个基准孔5的图像中,会出现明显的黑白分界线,此时,黑白分界线即为所述太鼓环4的外圆周的一段。
30.s3,采用第一对准识别法确定所述晶圆与工作台是否对准,当确定所述工作台1与晶圆3未对准时,执行s4。当确定所述晶圆与工作台对准时,控制装置按照预设的切割参数控制切割机构进行环切。
31.所述第一对准识别法包括如下过程:s31,光源启动,所述工作台1上一个基准孔5(第一个基准孔)与光源位置对应;s32,图像采集装置移动使其镜头的光轴移动至与光源位置对应的所述基准孔5内的选定位置后,再移动至所述基准孔5内的其他位置,图像采集装置在光轴移动到基准孔5内的每一位置处采集一张图像,从而得到一图像组。每张所述图像优选是所述基准孔5内局部区域的图像,每张图像可以仅是基准孔5的截面面积的很小一部分,例如是基准孔5的截面面积的1/10,局部区域的具体尺寸可以根据需要设计,此处不作限定。
32.s33,所述工作台1转动90
°
使下一基准孔5(第二个基准孔)转动至与光源位置对应后,执行s32;s34,所述工作台1转动90
°
使下一基准孔5(第三个基准孔)转动至与光源位置对应后,执行s32;s35,所述工作台1转动90
°
使下一基准孔5(第四个基准孔)转动至与光源位置对应后,执行s32;s36,确认四个所述图像组中是否都有一目标图像;若有,执行s37;反之,确定晶圆与工作台未对准。所述目标图像上具有黑白分界线,所述黑白分界线为一过所述目标图像的中心或紧邻所述目标图像的中心的直线,所述直线距所述目标图像的中心的距离例如可以为不超过1mm,具体根据实际需要进行设计,此处不作限定。
33.之所以判断是否有呈直线的黑白分界线是因为图像采集装置仅采集基准孔5内很小一部分的图像,在图像中,可能仅有太鼓环4的外圆周的很小一段,而圆形可以认为是若干段直线依次首尾连接而成,因此,只要确定图像中是否有呈直线的黑白分界线,再确定直
线的位置即可。
34.s37,确定每个所述目标图像拍摄时,所述镜头的光轴上的选定点在预设坐标系中的坐标,从而得到四个镜头位置坐标。所述光轴上的选定点可以根据需要人为选定,例如可以是镜头的光心或焦点或光轴上位于镜头前方确定距离的点。所述预设坐标系是以垂直于所述工作台1的轴线且相互垂直的两条数轴构造而成的三维坐标系。
35.例如,所述预设坐标系以所述工作台1的台面内的两条数轴为x轴和y轴且以工作台的轴线为z轴,对应的,工作台1的台面的中心为原点,则工作台的轴线上任一点的x坐标及y坐标确定。同时,镜头在初始位置时,光轴上的选定点在所述预设坐标系中的坐标是确定的,由于镜头仅进行平移,因此,选定点在预设坐标系中的z坐标是不变的,仅x坐标和y坐标改变。根据所述镜头的平移数据及选定点的初始坐标可以计算出选定点移动到不同位置后在所述预设坐标系中的坐标。并且,当所述晶圆3与工作台共轴时,它们轴线上任一点在所述预设坐标系中的x坐标、y坐标是相同的;当它们不是共轴时,所述晶圆3及工作台1的轴向上同一高度的点的z坐标相同,但x坐标和y坐标不同。
36.s38,根据四个所述镜头位置坐标求出四个圆的半径,其中,三个镜头位置坐标可以求出一个圆的圆心和半径,四个镜头位置坐标可以分为四组,从而可以计算出四个圆,计算时是根据圆的标准方程进行计算。实际核对时,主要是根据镜头位置坐标的x坐标和y坐标来计算得到圆的圆心及半径。
37.将求出的一组半径的最大值与最小值进行比较,若它们的差值小于第一误差阈值,则确定四个所述镜头位置坐标准确,所述晶圆与工作台对准;反之,四个镜头位置坐标不准确,确定晶圆与工作台未对准。所述第一误差阈值例如可以是1mm,具体根据需要设定,此处不作限定。
38.较优的,在所述s32中,先使所述镜头的光轴移动至与所述基准孔5共轴的状态,然后,使所述镜头的光轴在所述基准孔5的轴线附近移动,例如,所述镜头在距离所述基准孔5的轴线1mm的范围内移动,此处不作限定。并且,一个图像组中可以包括5-15张图像,而在一个图像组的图像采集时,只要找到目标图像后,就可以不用继续进行图像采集,例如当光轴与基准孔5共轴时采集的图像就是目标图像时,则图像采集装置无需移动一个位置再次采集图像,而是直接使工作台1转动90
°
,使图像采集装置进行下一个基准孔处的图像采集。
39.另外,如果在一个基准孔5处采集的图像的张数已经达到预设的数量,例如图像的张数已经达到10张,但是10张图像中并无目标图像时,即可确认晶圆3与工作台1未对准,此时,可以不再继续对其他基准孔5处进行图像采集,这样能够有效地提高处理效率。
40.当然,在具有多处光源的实施例中,也可以使工作台不转动,而是使图像采集装置逐一移动到每个基准孔处进行图像采集。或者,在另外的实施例中,可以通过多个图像采集装置同步进行多个基准孔5处的图像采集,即,通过四个图像采集装置同时采集四个基准孔处的图像,这样可以提高效率。
41.在图像分析时,首先对所述图像进行高斯滤波处理以消除图像由于硬件抖动、电磁干扰等外界因素产生的边界模糊等问题。后续通过canny算子进行边缘检测。完成检测边缘后,根据实际轮廓特征进行目标提取。相应的图像分析技术为已知技术,此处不作赘述。
42.s4,采用视觉寻边法在每个基准孔处分别获取一计算坐标,在获取一组符合要求的计算坐标后,根据一组所述计算坐标计算所述晶圆3的圆心坐标。
43.在获取一个计算坐标时,所述镜头的光轴根据二分法沿第一直线6的延伸方向在设定范围内移动,所述第一直线与所述工作台1的轴线及一基准孔5的轴线垂直且相交,所述设定范围涵盖所述基准孔;所述图像采集装置每次根据二分法移动一个位置后采集图像,当根据图像采集装置在一位置处采集的图像确定所述镜头的光轴在图像上的对应点位于图像上黑白分界线位置时,获取此图像拍摄时,所述镜头的光轴上的选定点在所述预设坐标系中的坐标并将该坐标作为计算坐标。
44.具体的,如附图1、附图3所示,当第一个基准孔与光源位置对应后,所述光轴移动的设定范围可以设置在所述第一直线6与第一个基准孔的孔壁的第一交点a和第二交点b之间,所述第一直线6与工作台的轴线及第一个基准孔的轴线垂直且相交,所述第一交点a比第二交点b更靠近所述工作台1的轴线。
45.s40,图像采集装置移动,使所述镜头的光轴移动至所述第一交点a与第二交点b之间的第一中间点a位置。
46.s41,图像采集装置采集图像,确认镜头的光轴在所采集图像上的对应点的rgb颜色是接近白色或接近黑色;当确定是接近黑色时,执行s42,当确定是接近白色时,执行s43。
47.s42,图像采集装置移动,使所述镜头的光轴移动至第一中间点a与第二交点b之间的第二中间点(图中未示出)位置,图像采集装置采集图像,再次确认镜头的光轴在所采集图像上的对应点的rgb颜色是接近白色或接近黑色。
48.s43,图像采集装置移动,使所述镜头的光轴移动至第一中间点a与第一交点a之间的第三中间点位置(图中未示出),图像采集装置采集图像,再次确认镜头的光轴在所采集图像上的对应点的rgb颜色是接近白色或接近黑色。
49.依据s42、s43确定的颜色确定后续二分法时,镜头的光轴的移动区间,并在相应的移动区间中继续二分法,直到根据一位置处采集的图像确定,所述镜头的光轴在图像上的对应点最接近图像上的黑白分界线时,此时,镜头的光轴上的选定点在所述预设坐标系中的坐标即为所要寻找的计算坐标。
50.在获取一个基准孔5处的计算坐标后,工作台1转动90
°
,使第二个基准孔转动至与所述光源位置对应,按照上述过程获得第二个基准孔处的计算坐标。工作台1再次转动90
°
,使第三个基准孔转动至与所述光源位置对应,按照上述过程获得第三个基准孔处的计算坐标。工作台1再次转动90
°
,使第四个基准孔转动至与所述光源位置对应,按照上述过程获得第四个基准孔处的计算坐标,从而获得四个计算坐标,四个计算坐标的z坐标是相同的,后续计算时是将四个计算坐标的x坐标及y坐标代入到圆的标准方程中计算得到圆的中心坐标及半径。
51.进一步,在获取到四个计算坐标后,需要确定几个计算坐标是否准确,才能更为准确地确定晶圆3的圆心坐标。
52.即根据获取的四个计算坐标,求出四个圆的半径,其中,三个计算坐标可以求出一个圆的圆心和半径,对应的,四个计算坐标可以分为四组,从而得到四个圆,计算时是将三个计算坐标的x坐标及y坐标代入圆的标准方程进行计算。
53.将求出的四个半径的最大值与最小值进行比较,若它们的差值小于第二误差阈值,则四个计算坐标选取准确,所述第二误差阈值的具体数值根据需要进行设定,此处不作
限定。反之,一组半径的最大值与最小值的差值大于第二误差阈值,则四个计算坐标选取错误,需要重新确定四个计算坐标后,再次进行上述的计算,至四个计算坐标满足要求为止。
54.当一组计算坐标正确时,在求出的四个所述圆中,选择半径最小的所述圆的中心坐标作为所述晶圆3的圆心坐标。所述圆心坐标即是所述晶圆3的轴线上的特定点在所述预设坐标系中的坐标,对应的,该半径最小的圆即为太鼓环的外圆周的形状,由此可以确定所述太鼓环4的外圆周上任一点在预设坐标系中的x坐标及y坐标。
55.在确定所述晶圆3的圆心坐标后,控制装置根据所述圆心坐标及工作台的台面的中心的坐标等调整切割参数,再根据调整后的切割参数控制切割机构进行环切。根据晶圆的圆形坐标、圆的半径及工作台的台面的中心坐标来进行切割参数的调整的过程为已知技术,也不是本方案的创新点,此处不作赘述。
56.当然,在另外的实施例中,在寻找每个所述基准孔处的计算坐标时,所述镜头的光轴的移动的设定范围也可以根据需要进行其他设置,如附图4所示,可以使镜头的光轴沿第一直线6在所述工作台的台面的中心0及晶圆的边缘点r之间移动,此时,所述光轴先移动至中心0与边缘点r的中点r/2处,然后根据在中点r/2处采集图像识别的颜色确定光轴后续移动的移动区间并重复二分法,直至找到上述的计算坐标,此处原理同上,不作赘述。
57.本发明尚有多种实施方式,凡采用等同变换或者等效变换而形成的所有技术方案,均落在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。