1.本发明主要涉及航天器技术领域,具体地说,涉及一种多体变构卫星的拓扑构型。
背景技术:
2.随着微小卫星及其技术的蓬勃发展,单卫星已经难以满足各国对其提出的多任务执行能力、较强的环境适应性及抗风险等要求,因此人们将目光转向多体可变构卫星的研究。多体可变构卫星由数量不等的结构相同的卫星模块组成,可以在没有外力干预的情况下自主实现卫星构型的变化且无需增减卫星的任何部件。多体可变构卫星可根据不同任务需求,将原有构型的多个功能卫星模块重组成适应新任务的最佳构型;在局部卫星模块出现故障的情况下,可通过在轨重构完成备用模块与故障模块之间的替换,具有自修复功能;还可根据发射条件将自重构卫星调整到最佳的发射构型,进入轨道后通过在轨重组恢复到运行及工作形态。由于具有以上突出优势,多体可变构卫星作为新型卫星概念,得到近年来各国密切关注及发展。因此,如何实现各卫星拓扑模块间的相对运动是本领域技术人员亟需解决的技术问题。
技术实现要素:
3.有鉴于此,本发明的目的在于提供一种多体变构卫星的拓扑构型,可实现各卫星拓扑模块间的相对运动。
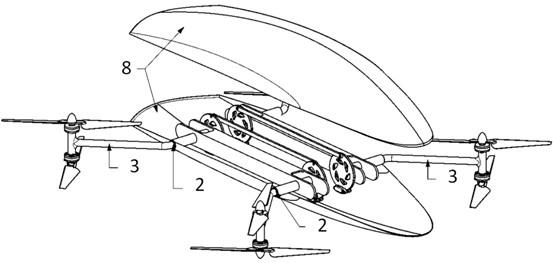
4.本发明的多体变构卫星的拓扑构型,包括卫星一、卫星二、卫星三、载荷一、载荷二、载荷三、载荷四、载荷五、载荷六、载荷七、载荷八和载荷九,所述载荷一、载荷二、载荷三、载荷四、载荷五、载荷六、载荷七、载荷八和载荷九从左至右依次连接,载荷一与载荷二通过二自由度关节连接,载荷二与载荷三通过二自由度关节连接,载荷三与载荷四通过三自由度关节连接,载荷四与载荷五通过二自由度关节连接,载荷五与载荷六通过二自由度关节连接,载荷六与载荷七通过三自由度关节连接,载荷七与载荷八通过二自由度关节连接,载荷八与载荷九通过二自由度关节连接,卫星一与载荷二固定连接,卫星二与载荷五固定连接,卫星三与载荷八固定连接。
5.进一步地,所述二自由度关节包括第一安装架、第二安装架、连接架、第一驱动部和第二驱动部,所述第一安装架和第二安装架有间隔地设置,所述连接架设置于第一安装架和第二安装架之间,所述第一安装架与连接架的一端可转动地连接,所述第二安装架与连接架的另一端可转动地连接,所述第一驱动部驱动第一安装架相对连接架转动,所述第二驱动部驱动第二安装架相对连接架转动,所述第一安装架转动形成的第一转动平面与第二安装架转动形成的第二转动平面相互垂直。
6.进一步地,所述第一驱动部包括第一电机、第一直齿轮和第二直齿轮,所述第一电机固定于连接架上,且所述第一电机的输出轴与第一直齿轮固定连接,所述第二直齿轮固定于第一安装架上,所述第一直齿轮与第二直齿轮位于同一平面且传动啮合;所述第二驱动部包括第二电机、第一锥齿轮和第二锥齿轮,所述第二电机固定于连接架上,且所述第二
电机的输出轴与第二锥齿轮固定连接,所述第一锥齿轮固定于第二安装架上,所述第一锥齿轮与第二锥齿轮垂直设置且传动啮合。
7.进一步地,所述第一安装架上还固定设置有第一转动轴,所述第二直齿轮固定套设于所述第一转动轴上,所述第一转动轴的两端均与连接架可转动地连接,所述第一安装架通过第一转动轴与连接架可转动地连接;所述第二安装架靠近第一安装架的侧面固定设置有第二转动轴,所述第二转动轴穿过所述连接架设置,且与所述连接架可转动地连接,所述第一锥齿轮固定套设于第二转动轴上;且所述第一转动轴与第二转动轴相互垂直。
8.进一步地,所述三自由度关节包括第一安装件、第二安装件、第三安装件、驱动安装件、第三驱动部、第四驱动部和第五驱动部,所述第一安装件设置于左部,所述第二安装件和第三安装件均设置于右部,所述驱动安装件设置于第一安装件与第二安装件和/或第三安装件之间,所述第一安装件通过第一转轴与驱动安装件可转动地连接,所述第一转轴分别与第一安装件和第三驱动部固定连接,所述第三驱动部固定于驱动安装件上,所述第三驱动部通过第一转轴驱动第一安装件相对驱动安装件转动,形成第三转动平面,所述第三转动平面与第二转动平面重合;所述第二安装件和第三安装件通过第二转轴与驱动安装件可转动地连接,所述第二转轴分别与第四驱动部、第二安装件和第三安装件固定连接,所述第四驱动部固定于驱动安装件上,所述第四驱动部通过第二转轴同时驱动第二安装件和第三安装件相对驱动安装件转动,形成第四转动平面,所述第四转动平面与第一转动平面重合;所述第五驱动部安装于第二安装件和第三安装件之间,并与第三转轴固定连接,所述第三转轴分别与第二安装件和第三安装件固定连接,所述第五驱动部通过第三转轴同时驱动第二安装件和第三安装件相对驱动安装件转动,形成第五转动平面;所述第三转动平面、第四转动平面和第五转动平面两两相互垂直。
9.进一步地,所述第三驱动部包括第三电机、第三锥齿轮和第四锥齿轮,所述第三电机固定于驱动安装件上,且所述第三电机的输出轴与第三锥齿轮固定连接,所述第四锥齿轮固定套设于第一转轴上,所述第三锥齿轮与第四锥齿轮垂直设置且传动啮合;所述第四驱动部包括第四电机、第三直齿轮和第四直齿轮,所述第四电机固定于驱动安装件上,且所述第四电机的输出轴与第三直齿轮固定连接,所述第四直齿轮固定套设于第二转轴上,所述第三直齿轮与第四直齿轮位于同一平面且传动啮合;所述第五驱动部包括第五电机、第五直齿轮和第六直齿轮,所述第五电机的输出轴与第五直齿轮固定连接,所述第六直齿轮固定套设于第三转轴上,所述第三直齿轮与第四直齿轮位于同一平面且传动啮合,所述第五电机垂直于第三电机和第四电机设置。
10.进一步地,所述驱动安装件为半框型结构,包括平行且间隔设置的第一端板、第二端板及设置于第一端板和第二端板之间的连接板,所述半框型结构的开口背离第一安装件设置,所述第三电机和第四电机相对设置,并分别固定于所述第一端板和第二端板上。
11.进一步地,所述第一转轴穿过所述连接板并与所述连接板可转动地连接,所述第四锥齿轮固定套设于第一转轴的一端,第一转轴的另一端与第一安装件固定连接;所述第二转轴穿过第一端板并与所述第一端板可转动地连接,其第一端与第二端板可转动地连接,其第二端与第三转轴固定连接,且所述第二转轴与第三转轴组成t型结构或l型结构,所述第二转轴与第一转轴相互垂直。
12.进一步地,所述第二安装件与第三安装件上下相互平行且有间隔地设置,所述第
二安装件与第三安装件之间固定有限位架,所述限位架卡合于第二转轴的第一端。
13.进一步地,所述限位架为t型架,所述t型架的横边垂直设置于第二安装件和第三安装件之间,所述t型架的竖边的一端卡合于第二转轴上。
14.本发明的多体变构卫星的拓扑构型,包括卫星一、卫星二、卫星三、载荷一、载荷二、载荷三、载荷四、载荷五、载荷六、载荷七、载荷八和载荷九,所述载荷一、载荷二、载荷三、载荷四、载荷五、载荷六、载荷七、载荷八和载荷九从左至右依次连接,载荷一与载荷二通过二自由度关节连接,载荷二与载荷三通过二自由度关节连接,载荷三与载荷四通过三自由度关节连接,载荷四与载荷五通过二自由度关节连接,载荷五与载荷六通过二自由度关节连接,载荷六与载荷七通过三自由度关节连接,载荷七与载荷八通过二自由度关节连接,载荷八与载荷九通过二自由度关节连接,卫星一与载荷二固定连接,卫星二与载荷五固定连接,卫星三与载荷八固定连接。多体变构卫星的拓扑构型整体转动主要通过二自由度关节与三自由关节的运动实现,该二自由度可实现彼此连接的相邻载荷在不同两平面转动,且该两平面相互垂直,该三自由度关节可实现彼此连接的相邻载荷在不同三平面转动,且该三平面两两相互垂直,通过该设置可实现各卫星拓扑模块间的相对运动。
附图说明
15.构成本发明的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:图1是本发明一种多体变构卫星的拓扑构型的结构示意图;图2是本发明中二自由度关节的结构示意图;图3是本发明中三自由度关节的结构示意图。
16.附图标记说明:载荷一-101;载荷二-102;载荷三-103;载荷四-104;载荷五-105;载荷六-106;载荷七-107;载荷八-108;载荷九-109;卫星三-110;卫星二-111;卫星一-112;第一安装架-201;第一直齿轮-202;第二直齿轮-203;第一电机-204;第一锥齿轮-205;第二锥齿轮-206;第二电机-207;连接架-208;第二安装架-209;第一转动轴-210;耳座-311;第二转动轴-212;第一安装件-301;驱动安装件-302;第三电机-303;第三锥齿轮-304;第四锥齿轮-305;第三直齿轮-306;第四直齿轮-307;第四电机-308;第二安装件-309;第三安装件-310;限位架-311;第二转轴-312;第五直齿轮-313;第六直齿轮-314;第五电机-315;支板-316;第一转轴-317;第三转轴-318。
具体实施方式
17.需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本发明。
18.本发明中,使用的方位如“左”、“右”、“前”、“后”、“上”、“下”等均以图1所示的视图为基准。术语“第一”、“第二”、“第三”、“第四”、“第五”主要用于区分不同的部件,但不对部件进行具体限制。
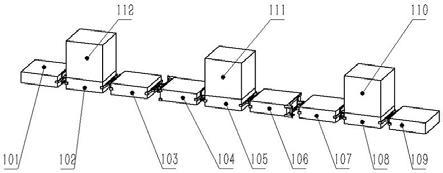
19.图1是本发明一种多体变构卫星的拓扑构型的结构示意图。该实施例的一种多体变构卫星的拓扑构型,包括卫星一112、卫星二111、卫星三110、载荷一101、载荷二102、载荷
三103、载荷四104、载荷五105、载荷六106、载荷七107、载荷八108和载荷九109,所述载荷一101、载荷二102、载荷三103、载荷四104、载荷五105、载荷六106、载荷七107、载荷八108和载荷九109从左至右依次连接,载荷一101与载荷二102通过二自由度关节连接,载荷二102与载荷三103通过二自由度关节连接,载荷三103与载荷四104通过三自由度关节连接,载荷四104与载荷五105通过二自由度关节连接,载荷五105与载荷六106通过二自由度关节连接,载荷六106与载荷七107通过三自由度关节连接,载荷七107与载荷八108通过二自由度关节连接,载荷八108与载荷九109通过二自由度关节连接,卫星一112与载荷二102固定连接,卫星二111与载荷五105固定连接,卫星三110与载荷八108固定连接,上述二自由度可实现彼此连接的相邻载荷在不同两平面转动,且该两平面相互垂直,同时,上述三自由度关节可实现彼此连接的相邻载荷在不同三平面转动,且该三平面两两相互垂直,通过该设置即可实现各卫星拓扑模块间的相对运动。
20.同时,参见图2,本发明的二轴正交关节包括第一安装架201、第二安装架209、连接架208、第一驱动部和第二驱动部,第一安装架201和第二安装架209有间隔地设置,具体地,第一安装架201位于左侧,第二安装架209位于右侧,连接架208设置于第一安装架201和第二安装架209之间,第一安装架201与连接架208的左端可转动地连接,第二安装架209与连接架208的右端可转动地连接,第一驱动部驱动第一安装架201相对连接架208转动,第二驱动部驱动第二安装架209相对连接架208转动,第一安装架201转动形成的第一转动平面与第二安装架209转动形成的第二转动平面相互垂直。为更好地描述本发明,建立了三维坐标系o-xyz,从图2中可知,第一转动平面即xoz平面,第二转动平面即yoz平面。上述第一安装架201和第二安装架209分别连接相邻的不同载荷,通过上述设置,当第一驱动部驱动第一安装架201相对连接架208转动时形成第一转动平面,当第二驱动部驱动第二安装架209相对连接架208转动时形成第二转动平面,两个转动平面相互垂直,确保了两载荷可以在不同的平面实现转动,进而扩大各卫星拓扑模块间的相对运动轨迹。就图2中实施例而言,可将第一安装架201与连接架208等同组成弯曲机构,第二安装架209与连接架208等同组成扭转机构,通过弯曲机构和扭转机构分别实现第一安装架201和第二安装架209在不同平面旋转,进而实现各卫星拓扑模块之间的相对运动。
21.作为本发明的优选实施例,第一驱动部包括第一电机204、第一直齿轮202和第二直齿轮203,第一电机204固定于连接架208上,且第一电机204的输出轴与第一直齿轮202固定连接,第二直齿轮203固定于第一安装架201上,第一直齿轮202与第二直齿轮203位于同一平面且传动啮合;第二驱动部包括第二电机207、第一锥齿轮205和第二锥齿轮206,第二电机207固定于连接架208上,且第二电机207的输出轴与第二锥齿轮206固定连接,第一锥齿轮205固定于第二安装架209上,第一锥齿轮205与第二锥齿轮206垂直设置且传动啮合。需要说明的是,在其他实施例中第一电机204和第二电机207可以用液压马达代替。
22.为了便于第一安装架201与第二直齿轮203之间的连接,优选地,第一安装架201上还固定设置有第一转动轴210,第二直齿轮203固定套设于第一转动轴210上,第一转动轴210的两端均与连接架208可转动地连接,第一安装架201通过第一转动轴210与连接架208可转动地连接。需要说明的是,第一安装架201的右侧面还固定设置有两个耳座311,第一转动轴210穿过两个该耳座311,且与两个该耳座311固定连接,以保证第一转动轴210转动时带动第一安装架201相对连接架208转动。该耳座311与第一安装架201之间可分体或一体形
成。应当清楚的是,第一转动轴210与第一安装架201不限于耳座311连接,还可是其他连接装置,如耳环。
23.同时,第二安装架209的左侧面固定设置有第二转动轴212,第二转动轴212穿过连接架208设置,且与连接架208可转动地连接,第一锥齿轮205固定套设于第二转动轴212上,优选地,第一转动轴210与第二转动轴212相互垂直,参见图2,第一转动轴210沿第一安装架201的长度方向设置(即沿前后方向设置),第二转动轴212沿第二安装架209的宽度方向设置(即沿左右方向设置),通过上述设置可以更好地实现第一安装架201的弯曲运动(第一安装架201相对连接架208转动时形成第一转动平面),和第二安装架209的扭转运动(第二安装架209相对连接架208转动时形成第二转动平面)。
24.在图1所示的实施例中,连接架208优选为半框型结构,该半框型结构的开口朝向第一安装架201设置,第一电机204和第二电机207分别设置于该半框型结构内的前后两端,第一转动轴210与连接架208形成全框型结构。应当清楚,连接架208并不仅限于半框型结构,也可为u型框,当然还可以有其他更多可能,均可以实现本发明的技术效果。
25.以设置于载荷一101与载荷二102之间的二自由度关节为例,第一安装架201连接载荷一101,第二安装架209连接载荷二102,当载荷需要变换位姿时,第一电机204驱动第一直齿轮202转动,第一直齿轮202带动第二直齿轮203转动,第二直齿轮203带动第一转动轴210,进而带动第一安装架201相对连接架208转动,该过程为实现载荷一101的弯曲运动;且第二电机207驱动第一锥齿轮205转动,第一锥齿轮205带动第二锥齿轮206转动,第二锥齿轮206带动第二转动轴212,进而带动第二安装架209相对连接架208转动,该过程为实现载荷二102上卫星102的扭转运动,通过载荷一101的弯曲运动和载荷二102的扭转运动可以很好地实现彼此间的相对运动。
26.进一步地,如图3所示,本发明中三自由度关节具体包括第一安装件301、第二安装件309、第三安装件310、驱动安装件302、第三驱动部、第四驱动部和第五驱动部,第一安装件301设置于左部,第二安装件309和第三安装件310均设置于右部,驱动安装件302设置于第一安装件301与第二安装件309和/或第三安装件310之间,第一安装件301通过第一转轴317与驱动安装件302可转动地连接,第一转轴317分别与第一安装件301和第三驱动部固定连接,第三驱动部固定于驱动安装件302上,第三驱动部通过第一转轴317驱动第一安装件301相对驱动安装件302转动,形成第三转动平面;第二安装件309和第三安装件310通过第二转轴312与驱动安装件302可转动地连接,第二转轴312分别与第四驱动部、第二安装件309和第三安装件310固定连接,第四驱动部固定于驱动安装件302上,第四驱动部通过第二转轴312同时驱动第二安装件309和第三安装件310相对驱动安装件302转动,形成第四转动平面;第五驱动部安装于第二安装件309和第三安装件310之间,并与第三转轴318固定连接,第三转轴318分别与第二安装件309和第三安装件310固定连接,第五驱动部通过第三转轴318同时驱动第二安装件309和第三安装件310相对驱动安装件302转动,形成第五转动平面;上述第三转动平面、第四转动平面和第五转动平面两两相互垂直。为更好地描述本发明,建立了三维坐标系o
’‑
x’y’z’,从图1中可知,第三转动平面即y’o’z’平面,该y’o’z’平面与yoz平面(即第二转动平面)重合,第四转动平面即x’o’z’平面与xoz平面(即第一转动平面)重合,第五转动平面即x’o’y’平面。通过上述设置,由于第一安装件301连接一载荷,第二安装件309和第三安装件310共同固定连接另一载荷:当第三驱动部驱动第一安装件
301相对驱动安装件302转动时,形成第三转动平面,第一安装件301以第一转轴317为轴线旋转;当第四驱动部通过第二转轴312同时驱动第二安装件309和第三安装件310相对驱动安装件302转动时,形成第四转动平面,第二安装件309和第三安装件310以第二转轴312为轴线旋转;当第五驱动部通过第三转轴318同时驱动第二安装件309和第三安装件310相对驱动安装件302转动,形成第五转动平面,此时,第二安装件309和第三安装件310以第三转轴318为轴线旋转,三个转动平面相互垂直,确保了两个不同载荷可以在不同的平面实现转动,进而扩大各卫星间的相对运动轨迹。就图3中实施例而言,可将第一安装件301、第一转轴317与驱动安装件302等同组成扭转机构,第二转轴312、第二安装件309、第三安装件310与驱动安装件302等同组成弯曲机构,第三转轴318与第二安装件309、第三安装件310等同组成折叠机构,通过弯曲机构、扭转机构和折叠机构分别实现第一安装件301、第二安装件309和第二安装件309在不同平面旋转,进而实现各卫星拓扑模块之间的相对运动。
27.作为本发明的优选实施例,第三驱动部包括第三电机303、第三锥齿轮304和第四锥齿轮305,第三电机303固定于驱动安装件302上,且第三电机303的输出轴与第三锥齿轮304固定连接,第四锥齿轮305固定套设于第一转轴317上,第三锥齿轮304与第四锥齿轮305垂直设置且传动啮合;第四驱动部包括第四电机308、第三直齿轮306和第四直齿轮307,第四电机308固定于驱动安装件302上,且所述第四电机308的输出轴与第三直齿轮306固定连接,第四直齿轮307固定套设于第二转轴312上,第三直齿轮306与第四直齿轮307位于同一平面且传动啮合;第五驱动部包括第五电机315、第五直齿轮313和第六直齿轮314,第五电机315的输出轴与第五直齿轮313固定连接,第六直齿轮314固定套设于第三转轴318上,第三直齿轮306与第四直齿轮307位于同一平面且传动啮合,第五电机315垂直于第三电机303和第四电机308设置。需要说明的是,在其他实施例中第三电机303、第四电机308和第五电机315可以用液压马达代替。
28.在图3所示的实施例中,驱动安装件302优选为半框型结构,包括平行且间隔设置的第一端板、第二端板及设置于第一端板和第二端板之间的连接板,第一端板位于后侧,第二端板位于前侧,该半框型结构的开口背离第一安装件301设置,第三电机303和第四电机308相对设置,分别设置于该第一端板和第二端板上。应当清楚,驱动安装件302并不仅限于半框型结构,也可为u型框,当然还可以有其他更多可能,均可以实现本发明的技术效果。
29.为了便于第一安装件301更好地相对驱动安装件302转动,优选地,第一转轴317穿过上述连接板并与该连接板可转动地连接,第四锥齿轮305固定套设于第一转轴317的右端,第一转轴317的左端与第一安装件301固定连接。同时,第二转轴312穿过第一端板并与该第一端板可转动地连接,其前端与第二端板可转动地连接,其后端与第三转轴318固定连接,第一转轴317沿第一安装件301的宽度方向设置(即沿左右方向设置),第二转轴312沿第二安装件309、第三安装件310的长度方向设置(即沿前后方向设置),第三转轴318沿第二安装件309和第三安装件310的高度方向设置(即沿上下方向设置),第一转轴317、第二转轴312与第三转轴318两两相互垂直,通过上述设置可以更好地实现第一安装件301的扭转运动(第一安装件301相对驱动安装件302转动时形成第三转动平面),第二安装件309、第三安装件310的弯曲运动(第二安装件309、第三安装件310相对驱动安装件302转动时形成第四转动平面)以及第二安装件309、第三安装件310的折叠运动(第二安装件309、第三安装件310相对驱动安装件302转动时形成第五转动平面)。参见图1,上述第二转轴312与第三转轴
318组成t型结构,具体地,第二转轴312为t型结构的竖边,第三转轴318为t型结构的横边。需要说明的是,在其他实施例中,第二转轴312与第三转轴318可组成l型结构,或其他可实现本发明技术效果的结构。
30.同时,参见图3,第二安装件309与第三安装件310上下相互平行且有间隔地设置,第二安装件309与第三安装件310之间固定有限位架311,限位架311卡合于第二转轴312的第一端,优选地,该限位架311为t型架,t型架的横边垂直设置于第二安装件309和第三安装件310之间,t型架的竖边的一端卡合于第二转轴312上。在第五电机315带动第五直齿轮313转动,第五直齿轮313带动第六直齿轮314转动,第六直齿轮314带动第三转轴318转动,进而同时带动第二安装件309与第三安装件310转动时,当第六直齿轮314上的齿轮传动力达到预设阈值时,限位架311与第二转轴312的卡合处松开,进而实现折叠运动,当第六直齿轮314上的齿轮传动力低于预设阈值时,限位架311与第二转轴312的卡合处卡合,进而实现固定连接,具体地,第六直齿轮314上的齿轮传动力的预设阈值通过第五电机315的预设阈值来调节实现。需要说明的是,限位架311优选通过锁定对接机构卡合于第二转轴312的第一端,锁定对接机构用于实现限位架311与第二转轴312的紧固和松开,当第六直齿轮314上的齿轮传动力达到预设阈值时,锁定对接机构松开,限位架311与第二转轴312分离,进而实现折叠运动,当第六直齿轮314上的齿轮传动力低于预设阈值时,锁定对接机构锁紧,限位架311与第二转轴312紧固,进而实现固定连接。
31.需要说明的是,第二安装件309、第三安装件310的前端均固定设置有一支板316,第三转轴318穿过两个支板316且与两个支板316固定连接,以保证第三转轴318转动时同时带动第二安装件309、第三安装件310相对驱动安装件302转动。该支板316与第二安装件309、第三安装件310之间可分体或一体形成。应当清楚的是,本发明中第二安装件309、第三安装件310、限位架311,支板316也可分体或一体形成。
32.以设置于载荷三103与载荷四104之间的三自由度关节为例,第一安装件301固定连接载荷三103,第二安装件309、第三安装件310共同固定连接载荷四104,当载荷三103与载荷四104需要变换位姿时,第三电机303驱动第三锥齿轮304转动,第三锥齿轮304带动第四锥齿轮305转动,第四锥齿轮305带动第一转轴317转动,进而带动第一安装件301相对驱动安装件302转动,形成第三转动平面,该过程为实现载荷三103的扭转运动;第四电机308驱动第三直齿轮306转动,第三直齿轮306带动第四直齿轮307转动,第四直齿轮307带动第二转轴312,进而同时带动第二安装件309、第三安装件310相对驱动安装件302转动,形成第四转动平面,该过程为实现载荷四104的弯曲运动;且第五电机315驱动第五直齿轮313转动,第五直齿轮313带动第六直齿轮314转动,第六直齿轮314带动第三转轴318转动,进而同时带动第二安装件309、第三安装件310相对驱动安装件302转动,形成第五转动平面,在此过程中,当第六直齿轮314上的齿轮传动力达到预设阈值时,限位架311与第二转轴312的卡合处松开,以便实现载荷四104的折叠运动,需要说明的是,卫星载荷之间折叠90
°
后的载荷连接面可共面。通过载荷三103的扭转运动和载荷四104的弯曲、折叠运动可以很好地实现载荷间的相对运动。
33.总之,本发明多体可变构卫星的拓扑构型整体需要扭转时,通过二自由度关节与三自由关节的扭转机构的运动实现,在卫星在轨服务过程中,将载荷间的二自由度关节的弯曲机构和三自由关节的弯曲机构和折叠机构锁定,以卫星二111为中心,左侧的二自由度
关节和三自由关节的扭转机构与右侧的二自由度关节和三自由关节的扭转机构同步反向运动,即可在不改变多体可变构卫星在轨整体姿态的情况下实现整体扭转构型变换;当多体可变构卫星的拓扑构型整体需要弯曲时,通过二自由度关节与三自由关节的弯曲机构实现,在卫星在轨服务过程中,将载荷间的二自由度关节的扭转机构和三自由关节的扭转机构和折叠机构锁定,以卫星二111为中心,左侧的二自由度关节和三自由关节的弯曲机构与右侧的二自由度关节和三自由关节的弯曲机构同步反向运动,即可在不改变多体可变构卫星在轨整体姿态的情况下实现整体扭转构型变换;当多体可变构卫星的拓扑构型整体需要折叠时,通过二自由度关节的弯曲机构与三自由关节的折叠机构的运动实现,在卫星在轨服务过程中,首先将载荷间的二自由度关节的扭转机构和弯曲机构以及三自由关节的扭转机构和弯曲机构锁定,然后卫星二111为中心,左侧三自由关节的折叠机构与右侧三自由关节的折叠机构同步同向运动180
°
,即可首先完成多体可变构卫星的拓扑构型的一次折叠,多体卫星呈现立方平面状态,最后将折叠机构锁定,启动所有二自由度关节的弯曲机构,以卫星一112、卫星二111和卫星三110为中心,所有二自由度关节的弯曲机构向上旋转90
°
,即可实现多体可变构卫星的拓扑构型的二次集中折叠,有利于多体可变构卫星的集中发射。
34.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。