技术特征:
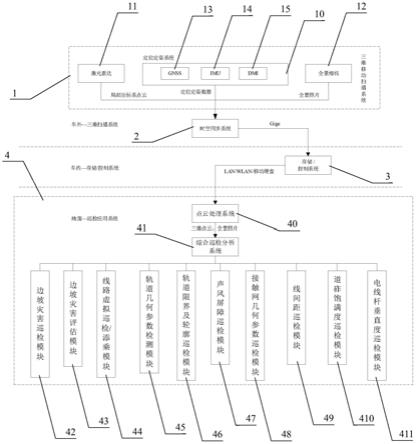
1.一种铁路综合巡检系统,其特征在于,包括:设置于车外的三维扫描系统(1)、设置于车内的存储/控制系统(3)、设置于地面的巡检应用系统(4),以及时空同步系统(2);所述三维扫描系统(1)包括定姿定位系统(10)、激光雷达(11)及全景相机(12),所述巡检应用系统(4)包括点云处理系统(40)及综合巡检分析系统(41);所述定姿定位系统(10)获取铁路综合巡检车的gnss、imu及dmi数据,所述激光雷达(11)获取被测物体的三维坐标数据,所述全景相机(12)获取全景影像数据;所述时空同步系统(2)根据gnss授时,为三维坐标、imu、dmi及全景影像数据提供时钟同步;所述存储/控制系统(3)实时保存经过时钟同步后的三维坐标、imu、dmi及全景影像数据;所述点云处理系统(40)首先使用gnss、imu及dmi数据融合解算pos数据,然后使用pos数据和激光雷达数据联合计算点云数据,再将点云数据与全景影像数据融合处理得到实景点云;所述综合巡检分析系统(41)以点云及全景影像数据为数据源,进行铁路基础设施检测分析。2.根据权利要求1所述的铁路综合巡检系统,其特征在于:所述综合巡检分析系统(41)包括轨道几何参数检测模块(45),所述三维扫描系统(1)在外业作业时进行点云及全景影像原始数据采集,所述点云处理系统(40)在内业作业时生成点云、pos轨迹文件及全景影像数据;所述轨道几何参数检测模块(45)将生成的点云进行分段,并将pos轨迹文件分割为与点云段相对应的文件段;读入一段点云,分离得到地面点云,读入与该段点云相对应的pos轨迹文件,去除以pos轨迹为中心,距离超过设定范围的点云,剩下的点云即为只包含道床的点云;在地面点云中,利用高程差分离得到钢轨部分的点云,利用分离得到的钢轨部分的点云进行钢轨顶面拟合和提取,得到左右两根钢轨顶面矢量线,并利用钢轨间的轨距范围检核钢轨顶面矢量线提取的可信度;利用提取得到的左右两根钢轨的矢量线进行轨道中线计算,得到轨道中线矢量,中线矢量的矢量节点间隔设定距离,为轨道中线赋里程值,通过设置起点与终点里程使轨道中线的里程与铁路维修里程统一;对轨道中线的坐标进行精细化处理,输出计算得到的精细化处理后的轨道中线矢量线,用于线路几何参数的计算。3.根据权利要求2所述的铁路综合巡检系统,其特征在于:所述轨道几何参数检测模块(45)计算通过轨道中线矢量节点的钢轨横截面,横截面的厚度不超过设定距离;将横截面上的点云相对于横截面进行投影,投影后得到钢轨横截面的二维坐标,针对左右钢轨的横截面分别与钢轨的标准廓形进行精确匹配,匹配后得到左右两根钢轨顶面坐标,并使用该顶面坐标更新原钢轨的顶面坐标;计算精确的轨道中线坐标,更新原轨道中线矢量节点坐标,遍历计算已经求得的所有轨道中线矢量节点,完成对轨道中线的坐标进行精细化处理。4.根据权利要求1、2或3所述的铁路综合巡检系统,其特征在于:所述综合巡检分析系统(41)包括轨道限界及轮廓巡检模块(46),所述三维扫描系统(1)在外业作业时进行点云及全景影像原始数据采集,所述点云处理系统(40)在内业作业时生成点云及全景影像数据;所述轨道限界及轮廓巡检模块(46)将生成的点云进行分段,读入一段点云,分离得到地面点云,在地面点云中,利用高程差分离得到钢轨部分的点云;利用分离出来的钢轨部分的点云进行钢轨顶面拟合和提取,得到左右两根钢轨顶面矢量线,并利用钢轨间的轨距范围检核钢轨顶面矢量线提取的可信度;利用提取得到的左右两根钢轨顶面矢量线进行轨道中线计算,并得到轨道中线,为轨道中线赋里程值,通过设置起点与终点里程使轨道中线的里程与铁路维修里程统一;按照设定的里程间隔值求取点云的横截面,并输出所有的横截面点云,针对每一个横截面点云进行限界计算,保存并输出限界计算的结果。
5.根据权利要求4所述的铁路综合巡检系统,其特征在于:所述轨道限界及轮廓巡检模块(46)以横截面与轨道中线的交点为坐标原点,x轴平行于钢轨顶面且指向右钢轨顶面沿轨向的中线,z轴垂直于x轴向上建立限界基准坐标系;将横截面点云相对于横截面进行投影,投影后得到钢轨横截面点云的二维坐标;将横截面点云二维坐标转换至限界基准坐标系并在该坐标系中生成标准建筑物限界模型,将横截面点云与标准建筑物限界模型进行叠加碰撞分析,得到并保存限界计算的结果。6.根据权利要求1、2、3或5所述的铁路综合巡检系统,其特征在于:所述综合巡检分析系统(41)包括接触网几何参数巡检模块(48),所述三维扫描系统(1)在外业作业时进行点云及全景影像原始数据采集,所述点云处理系统(40)在内业作业时生成点云、pos轨迹文件及全景影像数据;所述接触网几何参数巡检模块(48)将生成的点云进行分段,并将pos轨迹文件分割成与点云段相对应的文件段;读入一段点云并读入与该点云段对应的pos轨迹文件,去除以pos轨迹为中心,距离pos轨迹超过设定范围的点云,剩下的点云即为只包含道床及道床上方的点云ce;提取点云ce中地面部分的点云cf-d,在点云ce中取出点云cf-d得到空中部分的点云cf-k,在地面点云cf-d中,利用高程差分离得到钢轨部分的点云;利用分离出来的钢轨部分的点云进行钢轨顶面拟合和提取,得到左右两根钢轨顶面矢量线,并利用钢轨间的轨距范围检核钢轨顶面矢量线提取的可信度;利用提取得到的左右两根钢轨顶面矢量线进行轨道中线计算,并得到轨道中线矢量,中线矢量的矢量节点间隔为设定距离;为轨道中线赋里程值,通过设置起点与终点里程使轨道中线的里程与铁路维修里程统一;在空中点云cf-k中识别并提取接触网线,并进行矢量线拟合,矢量节点之间的距离为设定值;计算相邻接触网线的几何参数,保存并输出接触网线的几何参数。7.根据权利要求6所述的铁路综合巡检系统,其特征在于:所述接触网几何参数巡检模块(48)遍历铁路钢轨中左侧钢轨顶面中线的所有矢量节点,计算每一矢量节点a的方向矢量,生成与该方向矢量垂直的法平面f;遍历右侧钢轨顶面中线的矢量节点,寻找位于法平面f两侧且相邻的两个矢量节点c和d,计算该法平面f与cd连线的交点b;遍历接触网线的矢量节点,寻找位于该法平面f两侧且相邻的两个矢量节点e和f,计算该法平面f与ef连线的交点g;通过点g做线段ab的垂线,垂足记为点h,线段ab的中点记为i,hi连线的长度即为点i对应里程处的接触线拉出值,gh的长度即为点i对应里程处的接触线导高值,从而得到相邻接触网线的几何参数。8.根据权利要求1、2、3、5或7所述的铁路综合巡检系统,其特征在于:所述综合巡检分析系统(41)包括线间距巡检模块(49),所述三维扫描系统(1)在外业作业时进行点云及全景影像原始数据采集,所述点云处理系统(40)在内业作业时生成点云及全景影像数据;所述线间距巡检模块(49)将生成的点云进行分段,读入一段点云,分离得到地面点云,在地面点云中,利用高程差分离得到钢轨部分的点云;利用分离出来的钢轨部分的点云进行钢轨顶面拟合和提取,得到左右两根钢轨顶面矢量线,并利用钢轨间的轨距范围检核钢轨顶面矢量线提取的可信度;利用提取得到的左右两根钢轨顶面矢量线进行轨道中线计算,并得到轨道中线,为轨道中线赋里程值,通过设置起点与终点里程使轨道中线的里程与铁路维修里程统一;计算相邻两条轨道中线的线间距,保存并输出线间距。9.根据权利要求8所述的铁路综合巡检系统,其特征在于:所述线间距巡检模块(49)遍历其中一条轨道中线中的所有矢量节点,计算每一矢量节点a的方向矢量,生成与该方向矢
量垂直的法平面;遍历相邻轨道中线的矢量节点,寻找位于该法平面两侧且相邻的两个矢量节点c和d,计算该法平面与cd连线的交点b;计算ab的水平距离,ab的水平距离即为该点处的线间距并记录点a的里程,a的里程记为该线间距的里程值。10.根据权利要求1、2、3、5、7或9所述的铁路综合巡检系统,其特征在于:所述综合巡检分析系统(41)包括道砟饱满度巡检模块(410),所述三维扫描系统(1)在外业作业时进行原始数据采集,所述点云处理系统(40)在内业作业时生成点云、pos轨迹文件及全景影像数据;所述道砟饱满度巡检模块(410)将点云分割为点云段,并将pos轨迹文件分割成与点云段对应的pos轨迹文件段,并将pos轨迹文件与点云文件进行匹配;读入待巡检里程的点云段以及相应的pos轨迹文件,分离得到地面点云,去除空中部分的点云,提取以pos轨迹线为中线,两侧各设定宽度范围内的点云,被提取得到的点云即为只包含道床部分的点云;在只包含道床部分的点云中,利用高程差分离得到钢轨部分的点云,利用分离得到的钢轨部分的点云进行钢轨顶面拟合和提取,得到左右两根钢轨顶面矢量线,并可以利用钢轨间的轨距范围检核钢轨顶面矢量线提取的可信度;利用提取得到的左右两根钢轨顶面矢量线进行轨道中线计算,得到轨道中线,并为轨道中线赋里程值,通过设置起点与终点里程使轨道中线的里程与铁路维修里程统一;按照设定的里程间隔值求取点云的横截面,并输出所有的横截面点云,针对每一个横截面点云计算道砟饱满度,在连续一段线路针对每一帧点云进行道砟饱满度计算后累加,得到整段线路的道砟饱满度,保存并输出道砟饱满度计算的结果。11.根据权利要求10所述的铁路综合巡检系统,其特征在于:所述道砟饱满度巡检模块(410)将横截面内的点云投影至横截面,使之成为二维点云c;通过计算钢轨顶面矢量线与横截面的交点在横截面中定位钢轨,并利用道床边坡与钢轨的相对位置关系在横截面中定位道床边坡的位置;以左右两根钢轨顶面中线的连线为x轴、连线的中点为坐标原点、垂直连线向上为y轴建立标准坐标系,并将二维点云c旋转平移至标准坐标系;在标准中标系中生成道床标准横断面模型,逐个计算点云与标准模型所包夹的图形的面积,标准模型以上的为多余道砟,以下的为道砟缺失,计算结束后即可得到该断面的道砟饱满度。
技术总结
本发明公开了一种铁路综合巡检系统,定姿定位系统获取综合巡检车的GNSS、IMU及DMI数据,激光雷达获取被测物体的三维坐标,全景相机获取全景影像数据。时空同步系统根据GNSS授时为三维坐标、IMU、DMI及全景影像数据提供时钟同步。存储/控制系统实时保存经过时钟同步后的三维坐标、IMU、DMI及全景影像数据。点云处理系统先使用GNSS、IMU及DMI数据融合解算POS数据,再使用POS数据和激光雷达数据联合计算点云数据,将点云与全景影像数据融合处理得到实景点云。综合巡检分析系统以点云及全景影像为数据源进行铁路基础设施检测分析。本发明能解决现有系统复杂度和人力成本高,数据处理难度大的技术问题。度大的技术问题。度大的技术问题。
技术研发人员:李剑锋 王文昆 季育文
受保护的技术使用者:株洲时代电子技术有限公司
技术研发日:2022.01.26
技术公布日:2022/4/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。