1.本发明涉及水下航行器技术领域,尤其是涉及一种基于海扁虫运动方式的仿生水下航行装置及其控制方法。
背景技术:
2.近年来,随着仿生学研究的不断进步,科研工作者的目光集中到长期生活在水下,特别是能在水中自由遨游的鱼类的游动机理的研究上。鱼类游动具有效率高、速度快、机动灵活等许多优点,而这正是目前水下推进器的设计目标。传统的auv(auto underwater vehicle and underwater navigation equipment)虽然用途不同,但其运动控制和推进系统是由多个螺旋桨推进系统组成,并以电磁马达或液压马达为更多的原动力。推进装置体积大、能耗高、效率低,且具有较大的噪声和尾迹,使得auv的启动、加速性能差、灵活性和隐蔽性难以满足水下机器人技术发展的需要。
3.海扁虫所采用的推进方式是一种类似鱼类mpf的波动式推进方式。相较于传统的水下航行设备相比,该推进方式有以下显著特点:没有螺旋桨产生的与推进方向垂直的涡流,流体性能更好以上,波动推进的效率比常规水下航行设备高,能量利用率高,可以节省能源使用;传统auv采用的螺旋桨推进和舵控制,回转半径大,灵活性较差。而海扁虫身体扁长,类鱼鳍面足够柔韧,使其在狭窄的地形空间都能有良好的机动性能,回转半径大大减小,而且稳定性也更好。噪音也更小,隐蔽性更高,不易被水下声纳发现。
4.综上可见,基于海扁虫运动方式仿生的水下航行装备的研究有很重要的实际应用价值,通过仿生研究,由螺旋桨推进到波动推进的变革,其研究意义和目的不言而喻。
5.国内外对于海扁虫的仿生非常少,但是与其运动方式一致(mpf运动模式)的鳐鱼(以及其他相同运动模式的鱼类)的仿生水下机器人的研究较多,日本冈山大学在2013年研制的仿鳐科机器鱼,每侧胸鳍由6个独立控制的鳍条驱动单元组成,每根鳍条由一个伺服电机经过锥齿轮减速以后得带摆动动力,该小组探索性的研究了通过改善鳍条的特殊运动来实现机器鱼上升下潜策略,并进行了一系列载体水下实验。但是其中又有一些问题所在,比如电机过重,12个电机导致整条鱼身体过重,容易下沉;体积过大,机器及其不利于在水下行动;由齿轮组及电机带动,鳍条波形不能改变等缺陷。因此,有必要提出一种基于海扁虫运动方式的仿生水下航行装置。
技术实现要素:
6.本发明的目的在于提供一种基于海扁虫运动方式的仿生水下航行装置及其控制方法,能够通过改变轴距从而改变驱动水下航行装置的波形,进而改变水下航行装置的前进速度。
7.根据本发明的一个目的,本发明提供一种基于海扁虫运动方式的仿生水下航行装置,包括:
8.类鱼鳍装置,包括两个支杆、两个驱动杆和若干摆动杆,所述摆动杆套设在所述支
杆上并与所述支杆转动连接,所述驱动杆上设有偏心机构,所述驱动杆通过所述偏心机构与所述摆动杆的端部滑动连接,通过所述偏心机构带动所述摆动杆沿所述支杆转动,通过所述摆动杆的上下循环摆动产生动力;
9.驱动装置,包括驱动电机,所述驱动杆分别与所述驱动电机连接,用于带动所述驱动杆转动;
10.调距装置,包括舵机和滑轨,所述舵机的输出轴连接有转动杆,所述转动杆的两端分别铰接有调节杆,所述调节杆的一端与所述转动杆铰接连接,所述调节杆的另一端与所述支杆铰接连接,两个所述支杆的端头部设置在所述滑轨内且能在所述滑轨内滑动。
11.进一步地,还包括控制装置,所述舵机与所述控制装置连接,通过所述控制装置控制所述舵机的转动。
12.进一步地,所述驱动电机与所述控制装置连接,通过所述控制装置控制所述驱动电机的转动。
13.进一步地,还包括固定装置,所述固定装置包括机壳,所述支杆和所述驱动杆均设置在所述机壳内,所述滑轨设置在所述机壳的两端,所述驱动电机和所述舵机均固定在所述机壳上。
14.进一步地,两个所述支杆分别位于两个所述驱动杆的外侧。
15.进一步地,所述摆动杆的与所述驱动杆连接的一端固定有u型板,所述u形板的开口卡合在所述偏心机构上,所述u形板靠近所述摆动杆的一端设有通孔,所述u形板通过所述通孔套设在所述支杆上。
16.进一步地,所述偏心机构在所述驱动杆上等距设置,所述偏心机构沿所述驱动杆的圆周方向等角度依次设置。
17.进一步地,所述驱动电机的数量为两个,所述驱动轴分别与对应的所述驱动电机连接。
18.进一步地,所述摆动杆为碳纤维管,所述摆动杆之间连接有硅胶片。
19.根据本发明的另一个目的,本发明提供一种基于海扁虫运动方式的仿生水下航行装置的控制方法,包括如下步骤:
20.当需改变水下航行装置的前进速度时,舵机转动,带动转动杆旋转,转动杆两端的调节杆带动两个支杆在滑轨内向外或向内一定,从而实现轴距的改变;当轴距改变量达到要求时,舵机停止转动,保持不动,转动杆和支杆停止并保持在固定位置,轴距移动稳定后,就会形成新的波形。
21.本发明的技术方案通过采用了仿生海扁虫的波动式前进方式,通过改变两个支杆之间的距离来改变波形,从而使得前进速度进行改变。没有螺旋桨产生的与推进方向垂直的涡流,流体性能更好以上,能量利用率高,可以节省能源使用;在狭窄的地形空间都能有良好的机动性能,回转半径大大减小,而且稳定性好。
附图说明
22.为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前
提下,还可以根据这些附图获得其他的附图。
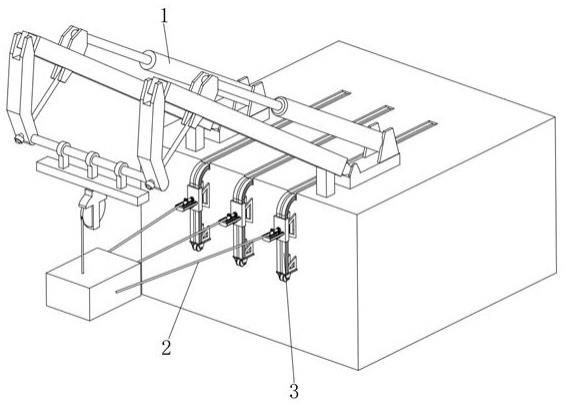
23.图1为本发明实施例的结构示意图;
24.图2为本发明实施例的内部结构示意图;
25.图3为本发明实施例驱动轴的结构示意图;
26.图4为本发明实施例摆动杆的结构示意图;
27.图5为本发明实施例舵机的结构示意图;
28.图6为本发明实施例的模型简图。
29.图中,1、机壳;2、滑轨;3、驱动电机;4、舵机;5、支杆;6、驱动杆;7、摆动杆;8、偏心机构;9、u型板;10、通孔;11、转动杆;12、调节杆。
具体实施方式
30.下面将结合实施例对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
31.在本发明的描述中,需要理解的是,术语"中心"、"纵向"、"横向"、"长度"、"宽度"、"厚度"、"上"、"下"、"前"、"后"、"左"、"右"、"竖直"、"水平"、"顶"、"底"、"内"、"外"、"顺时针"、"逆时针"等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
32.此外,术语"第一"、"第二"仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有"第一"、"第二"的特征可以明示或者隐含地包括一个或者更多个所述特征。在本发明的描述中,"多个"的含义是两个或两个以上,除非另有明确具体的限定。此外,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
33.实施例1
34.如图1-图5所示,
35.一种基于海扁虫运动方式的仿生水下航行装置,包括机壳1,机壳1的两端分别设有滑轨2,驱动电机3和舵机4均固定在机壳1的两端。
36.类鱼鳍装置包括两个支杆5、两个驱动杆6和若干摆动杆7,两个支杆分别位于两个驱动杆的外侧。摆动杆7套设在支杆5上并与支杆5转动连接,驱动杆6上设有偏心机构8,驱动杆6通过偏心机构8与摆动杆7的端部滑动连接,通过偏心机构8带动摆动杆7沿支杆5转动,通过摆动杆7的上下循环摆动产生动力。摆动杆为碳纤维管,摆动杆之间连接有硅胶片。
37.支杆5和驱动杆6均设置在机壳1内,两个支杆5的端头部设置在滑轨2内且能在滑轨2内滑动。
38.驱动电机3的数量为两个,驱动轴6分别与对应的驱动电机3连接,驱动电机3用于带动驱动杆6转动,驱动杆6带动其上的偏心机构8转动,从而带动摆动杆7沿支杆5转动;
39.摆动杆7的与驱动杆连接的一端固定有u型板9,u形板9的开口卡合在偏心机构8上,u形板9靠近摆动杆7的一端设有通孔10,u形板9通过通孔10套设在支杆5上。
40.偏心机构8在驱动杆6上等距设置,偏心机构8沿驱动杆6的圆周方向等角度依次设置。多个偏心机构8在驱动杆6上等距布置,且为了实现摆动杆7的波形完整稳定,多个偏心机构8在驱动杆6的圆周方向上呈等角度的分布方式,即相邻的偏心机构8之间间隔相同的角度布置,偏心机构8类似螺旋状布置在驱动杆6上。
41.调距装置包括舵机4和滑轨2,舵机4的输出轴连接有转动杆11,转动杆11的两端分别铰接有调节杆12,调节杆12的一端与转动杆11铰接连接,调节杆12的另一端与支杆5铰接连接;通过舵机4的转动带动转动杆11转动从而通过调节杆12带动支杆5在滑轨2内相互远离或相互靠近,从而实现两个支杆5之间的距离调整,即实现了波形的调整。
42.本发明还包括控制装置,舵机4和驱动电机3分别与控制装置连接,通过控制装置控制舵机4和驱动电机3的转动。
43.控制装置可以采用单片机,具体的可以为相应的ardui no单片机,在单片机上设置hc-04蓝牙串口模块,因此可以通过手机蓝牙模块实现与单品机的通讯,从而实现远程控制。本实施例的舵机采用spt 5425lv 25kg防水舵机(180
°
),单片机接受到手机发射出的改变信号的时候,单片机控制舵机旋转,做出改变轴距动作。
44.上述一种基于海扁虫运动方式的仿生水下航行装置的控制方法,包括如下步骤:
45.首先改变两个支杆5之间的轴距分为三个状态:初始状态、改变状态和结束稳定状态。
46.当处于初始状态时,水下航行装置处于原本设定的轴距,其波形波峰与波谷位置一定,因此排水量和速度也一定(忽略电机转速影响)。
47.当需改变水下航行装置的前进速度时,可以使用手机通过hc-04蓝牙串口模块控制改变轴距来实现。在手机发出信号后,单片机做出反应,对水下航行装置前后两端的舵机发出脉冲信号,从而使得舵机同时转动,带动连杆,连杆带动外轴移动,从而达到改变轴距的目的。
48.当轴距改变量足够时,控制手机发出停止信号,单片机停止发出脉冲信号,但是仍然保持通电,此时舵机停止转动,保持不动,转动杆11和支杆5也停止移动,并保持在一定位置。轴距移动稳定后就会形成新的波形,波峰、波谷的高度改变,排水量改变,从而达到通过改变两个支杆5轴距来改变前进速度的目的。
49.应当理解的是,为了实现机壳1与摆动杆7之间的连接,在机壳1与摆动杆7之间设有轴孔及轴承,用于作为保证内轴的同轴度的主要零件;止推环,用于限制内轴轴向移动;推力轴承,用于减小止推环于轴承之间的摩檫力。上述设置属于本领域的常规设置,其具体设置方式在此不再赘述。
50.本实施例所采用的驱动电机为两个370直流减速电机,驱动杆6与驱动电机之间通过联轴器连接,当两个驱动电机同速反向转动时,水下仿生装置将向前行驶,当两个驱动电机差速运动时,将向左或者向右前进。
51.本实施例中,为了使得两个支杆轴距的改变更为稳定,在机壳1的两端分别设有舵机4,两个舵机转动时,分别带动转动杆转动,进而带动调节杆带动支杆5移动,从而达到改变轴距的作用。
52.本实施例中的控制装置,具体可以采用用于旋转的spt 5425lv 25kg防水舵机(180
°
)、hc-04蓝牙串口模块、7.2v锂电池、电源模块以及相应的ardui no模块。hc-04蓝牙串口模块连接多用电源模块的5v和gnd,由多用电源模块供电;同时txd和rxd引脚分别连接单片机的a2,a3引脚(a2为单片机的rxd,a3为单片机的txd),通过手机连接蓝牙发送指令控制单片机,单片机处理并识别信息,然后控制舵机进行相应操作,改变水下航行设备的轴距。
53.实施例2
54.由图6所示,单个鱼鳍的波形受到偏心机构长度、驱动轴与支架间距、类鱼鳍长度三个因素的影响。在此定义一些物理量:x1:偏心机构长度、x2:驱动轴与支架间距、x3类鱼鳍长度、h:振幅、ω电机轴角速度。
55.根据相似三角形的性质,以及三角函数变换,最终我们得到振幅的函数模型。
[0056][0057]
此后,我们将x2与x1关联起来,即x2=k*x1,既有:
[0058][0059]
可以看出来,其实h只是和x3,k有关(也就是x3,k是决定振幅的因素),虑到平面四杆机构急回特性(该机构是平面四杆机构的变形),机构的惯性载荷会对机构有所损伤,同时考虑到h的大小会影响单次摆动的排水量(近似等于摆动函数的积分与h在x轴投影长度的乘积),相同情况下,排水量越小,游动的速度也就越小。因此x3、k(两个要素)的长度设计尤其重要。
[0060]
利用这一原理,给k赋值2、3、4、5、6(同时取x3为10cm),在matlab中进行运算,当k越大的时候,振幅越小。根据此特性,我们改变内支杆与驱动杆的轴距,就能改变类鱼鳍的振幅,从而改变类鱼鳍的波形,使得改变水下航行装置的前进速度,节省能量。
[0061]
本发明通过采用了仿生海扁虫的波动式前进方式,通过改变两个支杆之间的距离来改变波形,从而使得前进速度进行改变。没有螺旋桨产生的与推进方向垂直的涡流,流体性能更好以上,能量利用率高,可以节省能源使用;在狭窄的地形空间都能有良好的机动性能,回转半径大大减小,而且稳定性好。
[0062]
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。