1.本技术属于海洋油气勘探开发领域,具体涉及一种确定海洋钻井平台的最优位置的方法和系统。
背景技术:
2.作为连接海底井口与海洋钻井平台的纽带,隔水管在隔离海水、引导钻具、循环钻井液、补偿浮式钻井装置的升沉运动等方面发挥重要作用。无论深海油气开采采用何种浮式系统方案,隔水管都是海洋石油天然气开采必不可少的设备,同时也是薄弱易损的构件之一。处于深水环境中的隔水管,在洋流、波浪和海面平台的振荡、漂移和起伏运动等多种载荷的共同作用下,不仅产生较大的偏移,而且将产生交变应力,诱发隔水管疲劳,降低隔水管使用寿命,甚至断裂,引发次生灾害,给深海石油开发造成重大损失。
3.为确保隔水管在服役期间的安全性和完整性,应对隔水管的倾角和偏移量进行监测,通过偏移量和倾角可知海洋钻井平台偏离海底井口的状态,以确保其在安全范围内。
4.cn108729862b公开的针对海洋柔性立管系统的鲁棒自适应三维振动抑制方法,包括:建立海洋柔性立管系统的三维动力学模型;根据三维动力学模型,设计鲁棒自适应边界控制器;其中,三维动力学模型用于分析海洋柔性立管系统;获得海洋柔性立管系统的实时参数;根据鲁棒自适应边界控制器和实时参数,向驱动装置发送控制命令,以使驱动装置对柔性立管施加作用力,以抑制立管振动。但是不能通过测量上下倾斜的角度和位置,优化出平台的最优位置,使隔水管的中间变形量最小,提高隔水管使用寿命。
技术实现要素:
5.本发明所要解决的技术问题是提供一种解决隔水管的安全性和完整性,提高隔水管使用寿命的确定海洋钻井平台的最优位置的方法和系统。
6.为了解决以上技术问题,本发明提供一种确定海洋钻井平台的最优位置的方法,包括以下步骤:
7.获取隔水管的当前状态信息和所述海洋钻井平台的当前位置信息,所述当前状态信息包括上柔性节角度、下柔性节角度、有效底端张力、有效顶端张力和几何刚度系数;
8.根据所述隔水管的当前状态信息和所述海洋钻井平台的当前位置信息,确定所述海洋钻井平台的移动距离和移动角度;
9.当所述海洋钻井平台基于所述移动距离和所述移动角度移动后,所述隔水管的上柔性节角度和下柔性节角度达到最小。
10.进一步的,根据所述隔水管的当前状态信息和海洋钻井平台的当前位置信息,确定海洋钻井平台的移动距离和移动角度;
11.海洋钻井平台的移动距离和移动角度的计算公式如下:
ue=(a
twt
wa)-1atwt
wθ;wθ;wθ;wθ;wθ;wθ;wθ;wθ;wθ;wθ;wθ;wθ;
12.其中,δu为移动距离,ξ为移动角度,tb为隔水管的有效底端张力,t
t
为隔水管的有效顶端张力,αb为隔水管的下柔性节角度,α
t
为隔水管的上柔性节角度,qb为隔水管的底部剪切力,q
t
为隔水管的顶部剪切力。
13.δx为x轴方向的位移,δy为y轴方向的位移,ue为加权等效偏移量,a为简化矩阵,
w为加权矩阵,θ为上下角度,ue为等效偏移向量,为底部与zx平面倾斜角度,为底部与zy平面倾斜角度,为顶部与zx平面倾斜角度,为顶部与zy平面倾斜角度,xe为x轴方向等效位移,ye为y轴方向等效位移,xb为底部x轴方向位移,yb为底部y轴方向位移,x
t
为顶部x轴方向位移,y
t
为顶部y轴方向位移,γb为底部偏移向量与x轴夹角,γ
t
为顶部偏移向量与x轴夹角,ub为底部偏移向量,u
t
为顶部偏移向量,u
bf
为隔水管受外部载荷引起的底部位移,u
tf
为隔水管受外部载荷引起的顶部位移,α
bo
为隔水管顶部位移引起的下柔性节角度度,α
to
为隔水管顶部位移引起的上柔性节角度度,α
bf
为隔水管受侧向载荷引起的下柔性节角度度,α
tf
为隔水管受侧向载荷引起的上柔性节角度度。
14.k
t
为隔水管的几何刚度,t
ti
,t
bi
为隔水管分段i的顶端顶张力和底端张力,wi为隔水管分段i的重力。
15.进一步的,隔水管的顶部设有第一倾角仪和第二倾角仪,底部设有第三倾角仪和第四倾角仪;
16.通过所述第一倾角仪和所述第二倾角仪,获取所述隔水管的上柔性节角度;通过所述第三倾角仪和所述第四倾角仪,获取所述隔水管的下柔性节角度。
17.进一步的,以所述隔水管的底部为坐标原点,建立空间直角坐标系,所述空间直角坐标系的z轴垂直于所述海床,所述空间直角坐标系的x轴和y轴构成的平面平行于所述海床,所述隔水管的上柔性节角度为所述隔水管的顶部与所述z轴之间的夹角,所述隔水管的下柔性节角度为所述隔水管的底部与所述z轴之间的夹角。
18.进一步的,隔水管的顶端与张紧器连接,并保持张紧状态;
19.通过所述张紧器,获取所述隔水管的有效顶端张力;
20.根据所述隔水管的自身特性和泥浆特性,计算所述隔水管的几何刚度系数。
21.一种确定海洋钻井平台的最优位置的系统,包括连接海洋钻井平台与海床的隔水管,还包括:
22.获取模块,包括隔水管顶部设置的第一倾角仪和第二倾角仪,底部设置的第三倾角仪和第四倾角仪;以及隔水管顶端设置的张紧器,底端设置的防喷器。防喷器设置在海床上。
23.进一步的,第三倾角仪和第四倾角仪均通过通过水下信标与水听器无线通信连接。
24.本发明与现有技术相比,具有如下有益效果:
25.1.本发明根据隔水管的当前状态信息和海洋钻井平台的当前位置信息,确定海洋钻井平台的移动距离和移动角度,以使隔水管的上柔性节角度和下柔性节角度达到最小,从而提升隔水管的安全性和完整性。
26.2.本发明通过倾角仪和张紧器,测量隔水管上下倾斜的角度和位置,优化出平台的最优位置,从而使隔水管处于一个最优状态,上下的连接处的横切力小,隔水管的中间变形量最小,隔水管收到的横向应力最小,提高了隔水管的使用寿命。
27.3.本发明水下两个倾角仪,第三倾角仪和第四倾角仪都是通过水下信标直接与水听器无线通信,把数据传输上来。该无线连接方式与常规有线方式与水面通信,或者水下的两个倾角仪之间使用有线通信,然后把二者之间的差值通过无线上传的方式相比,安装简
单便捷,提高作业效率。水下信号通过信标传输给水面的水听器,无线通信传输数据,信息容易获取,易于实现。
附图说明
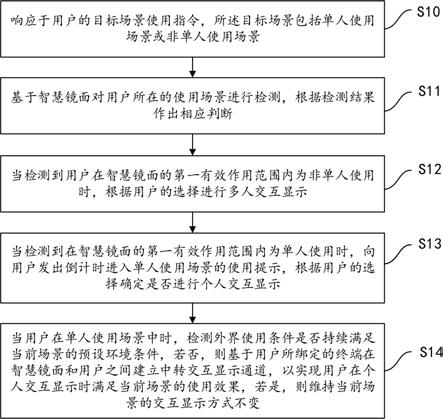
28.图1为本发明方法流程图。
29.图2为本发明海洋钻井平台和隔水管的位置示意图。
30.图3为本发明系统的结构示意图。
31.图中,1.海洋钻井平台,2.隔水管,3.海床,4.张紧器,5.第一倾角仪,6.第二倾角仪,7.第三倾角仪,8.第四倾角仪,9.防喷器,10.罗经。
具体实施方式
32.下面将结合附图,对本技术的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他等效变换,都属于本技术保护的范围。
33.如图1所示,一种确定海洋钻井平台1的最优位置的方法,包括以下步骤:
34.步骤101,获取隔水管2的当前状态信息和海洋钻井平台1的当前位置信息。
35.其中,当前状态信息包括上柔性节角度、下柔性节角度、有效底端张力、有效顶端张力和几何刚度系数。
36.具体地,海洋钻井平台1上设置有gps装置和罗经10,可通过gps装置和罗经10获取海洋钻井平台1的当前位置信息。隔水管2的顶部安装有第一倾角仪5和第二倾角仪6,隔水管2的底部安装有第三倾角仪7和第四倾角仪8;相应地,可以通过所述第一倾角仪5和所述第二倾角仪6,获取所述隔水管2的上柔性节角度;通过所述第三倾角仪7和所述第四倾角仪8,获取所述隔水管2的下柔性节角度。
37.本实施例中,以隔水管2的底端为坐标原点,建立空间直角坐标系,该空间直角坐标系的z轴垂直于所述海床3,该空间直角坐标系的x轴和y轴构成的平面平行于所述海床3,隔水管2的上柔性节角度为隔水管2的顶端与所述z轴之间的夹角,隔水管2的下柔性节角度为隔水管2的底端与所述z轴之间的夹角。
38.如图2所示,隔水管2的顶端与张紧器4连接,并保持张紧状态。在垂直方向上,隔水管2的受力包括:(1)隔水管2的顶端受力,等于顶端张紧器4的张力;(2)隔水管2自身重力;(3)泥浆重力;(4)隔水管2的底端接头拉力,等于有效底端张力。隔水管2在水平横向的受力包括海流力。其中,带有各种泥浆的隔水管2的刚度,可通过供货商查询获取。相应地,可以通过上述张紧器4,获取隔水管2的有效顶端张力。根据顶端张紧器4的张力、隔水管2的重力、隔水管2中泥浆的重力均为实时测量,通过测量隔水管2和底部防喷器9之间的倾斜角度,计算有效底端张力。根据隔水管2的自身特性和泥浆特性,计算隔水管2的几何刚度系数。
39.步骤102,根据所述隔水管2的当前状态信息和所述海洋钻井平台1的当前位置信息,确定所述海洋钻井平台1的移动距离和移动角度;其中,当所述海洋钻井平台1基于所述移动距离和所述移动角度移动后,所述隔水管2的上柔性节角度和下柔性节角度达到最小。
40.具体地,可以根据以下公式计算所述海洋钻井平台1的移动距离和移动角度:具体地,可以根据以下公式计算所述海洋钻井平台1的移动距离和移动角度:具体地,可以根据以下公式计算所述海洋钻井平台1的移动距离和移动角度:ue=(a
twt
wa)-1atwt
wθ;wθ;wθ;wθ;wθ;wθ;wθ;wθ;wθ;wθ;wθ;wθ;
41.其中,δu为移动距离,ξ为移动角度,tb为所述隔水管2的有效底端张力,t
t
为所述隔水管2的有效顶端张力,αb为所述隔水管2的下柔性节角度,α
t
为所述隔水管2的上柔性节
角度,qb为所述隔水管2的底部剪切力,q
t
为所述隔水管2的顶部剪切力。
42.δx为x轴方向的位移,δy为y轴方向的位移,ue为加权等效偏移量,a为简化矩阵,w为加权矩阵,θ为上下角度值,ue为等效偏移向量,为底部与zx平面倾斜角度,为底部与zy平面倾斜角度,为顶部与zx平面倾斜角度,为顶部与zy平面倾斜角度,xe为x轴方向等效位移,ye为y轴方向等效位移,xb为底部x轴方向位移,yb为底部y轴方向位移,x
t
为顶部x轴方向位移,y
t
为顶部y轴方向位移,γb为底部偏移向量与x轴夹角,γ
t
为顶部偏移向量与x轴夹角,ub为底部偏移向量,u
t
为顶部偏移向量,u
bf
为所述隔水管2受外部载荷引起的底部位移,u
tf
为所述隔水管2受外部载荷引起的顶部位移,α
bo
为所述隔水管2顶部位移引起的下柔性节角度度,α
to
为所述隔水管2顶部位移引起的上柔性节角度度,α
bf
为所述隔水管2受侧向载荷引起的下柔性节角度度,α
tf
为所述隔水管2受侧向载荷引起的上柔性节角度度。
43.k
t
为隔水管的几何刚度,t
ti
,t
bi
为隔水管分段i的顶端顶张力和底端张力,wi为隔水管分段i的重力。
44.本实施例根据隔水管2的当前状态信息和海洋钻井平台1的当前位置信息,确定海洋钻井平台1的移动距离和移动角度,以使隔水管2的上柔性节角度和下柔性节角度达到最小,从而提升隔水管2的安全性和完整性。
45.如图3所示,一种确定海洋钻井平台1的最优位置的系统,包括连接海洋钻井平台1与海床3的隔水管2,还包括:
46.获取模块310,包括隔水管2顶部设置的第一倾角仪5和第二倾角仪6,底部设置的第三倾角仪7和第四倾角仪8;以及隔水管2顶端设置的张紧器4,底端设置的防喷器9。通过所述第一倾角仪5和所述第二倾角仪6,获取所述隔水管2的上柔性节角度;通过所述第三倾角仪7和所述第四倾角仪8,获取所述隔水管2的下柔性节角度。
47.所述第三倾角仪7和第四倾角仪8均通过通过水下信标与水听器无线通信连接。
48.所述隔水管2的顶端与张紧器4连接,并保持张紧状态;通过所述张紧器4,获取所述隔水管2的有效顶端张力。隔水管2底端设置防喷器。防喷器9设置在海床3上。
49.确定模块320,为能够计算得到移动距离和移动角度的计算机,用于根据所述隔水管2的当前状态信息和所述海洋钻井平台1的当前位置信息,确定所述海洋钻井平台1的移动距离和移动角度。
50.本技术水下两个倾角仪无线通信的安装方式简单便捷,信息容易获取,易于实现,减少了现有监测系统的设备配置,例如流测仪、应变传感器、通信线或者无线水声信标。
51.需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者装置不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者装置所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括该要素的过程、方法、物品或者装置中还存在另外的相同要素。
52.通过以上的实施方式的描述,本领域的技术人员可以清楚地了解到上述实施例方法可借助软件加必需的通用硬件平台的方式来实现,当然也可以通过硬件,但很多情况下前者是更佳的实施方式。基于这样的理解,本技术的技术方案本质上或者说对现有技术做
出贡献的部分可以以软件产品的形式体现出来,该计算机软件产品存储在一个存储介质(如rom/ram、磁碟、光盘)中,包括若干指令用以使得一台终端(可以是手机,计算机,服务器,空调器,或者网络设备等)执行本技术各个实施例所述的方法。
53.上面结合附图对本技术的实施例进行了描述,但是本技术并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本技术的启示下,在不脱离本技术宗旨和权利要求所保护的范围情况下,还可做出很多形式,均属于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。