1.本公开实施例涉及一种超声换能器的控制方法、控制装置、手术设备及存储介质。
背景技术:
2.超声刀是一种常见的外科手术刀,由于其具有创伤小、烟雾少、可凝血等特点,能够在外科手术中广泛应用。超声刀包括主机、超声换能器及超声刀头,其工作原理是主机产生一定频率的功率源给超声换能器,超声换能器产生该频率的机械振动并带动超声刀头也产生机械振动,由于其工作频率一般为20khz~100 khz,属于高频电外科设备,其作用于人体组织起到切割与凝闭的作用,不会引起组织干燥、灼伤等副作用,刀头工作时也没有电流通过人体。
3.超声刀的核心就是如何驱动超声换能器将电能转换成机械能。由于超声刀的换能器工作在谐振状态的时候,电能转换为机械能的效率最高,超声刀头的使用寿命也才会更久,因此需要对于超声换能器进行阻抗匹配,这样,在负载以及外部条件发生变化的情况下也能够保证超声换能器始终工作在谐振点附近。
技术实现要素:
4.本公开实施例提供一种超声换能器的控制方法、控制装置、手术设备及存储介质。
5.根据本公开第一方面,提供一种超声换能器的控制方法,所述超声换能器连接有负载,所述控制方法包括:获取使所述超声换能器处于谐振状态下的流经所述负载的目标电流;向所述超声换能器施加驱动信号以产生流经所述负载的负载电流;调节所述驱动信号,以使所述负载电流等于所述目标电流,从而使所述超声换能器处于所述谐振状态。
6.至少一些实施例中,所述驱动信号包括驱动电流,所述调节所述驱动信号包括:获取施加至所述超声换能器的所述驱动电流;以及通过调节所述驱动电流以调节所述负载电流,使所述负载电流等于所述目标电流。
7.至少一些实施例中,所述驱动信号包括驱动电流、驱动电压和驱动频率,所述驱动电流和所述驱动电压之间具有相位角,所述调节所述驱动信号包括:获取施加至所述超声换能器的所述驱动频率;以及通过调节所述驱动频率以调节所述相位角,从而使所述负载电流等于所述目标电流。
8.至少一些实施例中,所述通过调节所述驱动频率以调节所述相位角,包括:确定目标相位角和与所述目标相位角对应的目标频率;调节所述驱动频率,使所述驱动频率等于所述目标频率,从而使所述相位角等于所述目标相位角。
9.至少一些实施例中,所述超声换能器等效为静态电容,所述静态电容与所述负载并联连接,所述确定目标相位角包括:获取施加至所述超声换能器的所述驱动电压和所述超声换能器的容抗;根据所述驱动电压和所述容抗,确定流经所述静态电容的电流;根据流经所述静态电容的电流和所述目标电流,确定所述目标相位角。
10.至少一些实施例中,根据流经所述静态电容的电流和所述目标电流,确定所述目
标相位角:其中,θ0为所述目标相位角,i2为所述流经所述静态电容的电流,i0为所述目标电流。
11.至少一些实施例中,所述确定与所述目标相位角对应的目标频率,包括:在预设频率范围内进行频率扫描;在所述频率扫描过程中,获取使所述超声换能器处于所述谐振状态下的频率作为所述目标频率。
12.至少一些实施例中,当所述超声换能器处于所述谐振状态下的频率处时,所述超声换能器的阻抗最小。
13.至少一些实施例中,所述预设频率范围为大于等于53.5千赫兹且小于等于57.5千赫兹;所述目标频率为大于等于53.5千赫兹且小于等于57.5千赫兹;所述目标相位角为大于等于0
°
且小于等于90
°
。
14.至少一些实施例中,所述驱动信号包括驱动电流、驱动电压和驱动频率,所述驱动电流和所述驱动电压之间具有相位角,所述控制方法还包括:获取施加至所述超声换能器的所述驱动电流和所述驱动频率;调节所述驱动电流,并且调节所述驱动频率以调节所述相位角,使所述负载电流等于所述目标电流。
15.至少一些实施例中,所述负载电流、所述驱动电流和所述相位角之间满足以下关系:i1= i
×ꢀ
cosθ,其中,i1为所述负载电流,i为所述驱动电流,θ为所述相位角。
16.至少一些实施例中,所述超声换能器连接有超声刀头,所述超声刀头配置为切割目标组织;在所述超声刀头切割所述目标组织的过程中,重复执行所述获取使所述超声换能器处于谐振状态下的流经所述负载的目标电流的步骤、所述向所述超声换能器施加驱动信号以产生流经所述负载的负载电流的步骤、以及所述调节所述驱动信号以使所述负载电流等于所述目标电流,从而使所述超声换能器处于所述谐振状态的步骤,直到所述目标组织切割完毕。
17.根据本公开第二方面,提供一种超声换能器的控制装置,所述超声换能器连接有负载,所述控制装置包括:获取单元,配置为获取使所述超声换能器处于谐振状态下的流经所述负载的目标电流;驱动单元,配置为向所述超声换能器施加驱动信号以产生流经所述负载的负载电流;调节单元,配置为调节所述驱动信号,以使所述负载电流等于所述目标电流,从而使所述超声换能器处于所述谐振状态。
18.根据本公开第三方面,提供一种手术设备,包括:主机和与所述主机连接的超声换能器,其中,所述主机包括前述的所述控制装置。
19.根据本公开第四方面,提供一种手术设备,包括:处理器;存储器,包括一个或多个计算机程序模块;其中,所述一个或多个计算机程序模块被存储在所述存储器中并被配置为由所述处理器执行,所述一个或多个计算机程序模块包括用于执行实现前述的控制方法的指令。
20.根据本公开第五方面,提供一种存储介质,用于非暂时性地存储计算机可读指令,当所述计算机可读指令由计算机执行时可实现前述的控制方法。
附图说明
21.为了更清楚地说明本公开实施例的技术方案,下面将对实施例的附图作简单地介绍,显而易见地,下面描述中的附图仅仅涉及本公开的一些实施例,而非对本公开的限制。
22.图1为本公开的具有超声换能器的手术设备的等效电路;图2为本公开实施例的超声刀各部件的连接框图;图3为本公开实施例的具有超声换能器的手术设备的等效电路;图4为本公开实施例的提供的超声换能器的控制方法的流程图;图5为本公开实施例的控制方法中执行调节驱动信号步骤时的流程图;图6为本公开实施例的控制方法中执行调节驱动频率步骤时的流程图;图7为本公开实施例的驱动电流和动态支路电流之间的关系示意图;图8为本公开另一实施例的控制方法中执行调节驱动信号步骤时的流程图;图9为本公开实施例的控制方法中执行确定目标相位角步骤时的流程图;图10为本公开实施例的控制方法中执行确定目标频率步骤时的流程图;图11为本公开实施例的超声换能器的控制装置的框图。
具体实施方式
23.为使本公开实施例的目的、技术方案和优点更加清楚,下面将结合本公开实施例的附图,对本公开实施例的技术方案进行清楚、完整地描述。显然,所描述的实施例是本公开的一部分实施例,而不是全部的实施例。基于所描述的本公开的实施例,本领域普通技术人员在无需创造性劳动的前提下所获得的所有其他实施例,都属于本公开保护的范围。
24.除非另作定义,此处使用的技术术语或者科学术语应当为本公开所属领域内具有一般技能的人士所理解的通常意义。本公开说明书以及权利要求书中使用的“第一”、“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。“包括”或者“包含”等类似的词语意指出现在“包括”或者“包含”前面的元件或者物件涵盖出现在“包括”或者“包含”后面列举的元件或者物件及其等同,并不排除其他元件或者物件。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,而是可以包括电性的连接,不管是直接的还是间接的。“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则所述相对位置关系也可能相应地改变。
25.图1为本公开的具有超声换能器的手术设备的等效电路。该手术设备例如为诸如超声刀的外科手术设备。当超声刀头切割目标组织时,超声换能器和超声刀头整体处于机械谐振状态,其可等效为图1的电路处于谐振状态。
26.超声换能器的等效电路如图1虚线框所示,l1为动态电感,c1为动态电容,r1为动态电阻,其中动态电感l1由换能器质量引起,r1由换能器机械损耗引起。本公开中,将动态电感l1、动态电容c1和动态电阻r1这一支路称为动态支路。c0为静态电容,是受夹持的压电振子两极板之间的电容,其与动态支路并联连接。r为负载电阻,位于动态支路中,与动态电阻r1、动态电容c1和动态电阻r1均串联;当无负载时,r为零。
27.在超声刀工作过程中,超声刀主机产生一定频率的电信号,这个频率需能使动态支路达到最小阻抗才能实现最大的效率。根据串联谐振电路原理,频率需满足:, 此时,超声换能器工作在串联谐振状态,动态支路等效于只有动态电阻
r1存在,阻抗最小,效率最高。然而,因为有静态电容c0的存在,使超声换能器呈容性,即使工作在串联谐振频率点上,也限制了超声换能器的工作效率。
28.如图1所示,为了提高超声换能器的工作效率,通常采用将一个电感l0与动态支路并联或串联的连接方式(图1仅示出为并联连接方式),使电感l0和静态电容c0在当前工作频率下也工作在谐振状态。
29.发明人发现,在超声刀工作过程中,由于切割的目标组织可能不同,导致负载r会发生实时变化。例如切割一些硬组织时,负载阻抗将增大,使换能器处于谐振状态下的谐振频率并不固定。而且,不同超声换能器的静态电容c0的大小也有差异,这同样影响这谐振频率。由于超声换能器属于损耗部件,在使用一段时间后,其静态电容c0会发生变化,具有较大的离散型,例如使用年限越长,静态电容c0会增加,导致超声换能器的谐振频率在切割目标组织过程中是动态变化的。
30.为此,本公开实施例提供一种超声换能器的控制方法,该超声换能器连接有负载,该控制方法包括:获取使超声换能器处于谐振状态下的流经负载的目标电流;向超声换能器施加驱动信号以产生流经负载的负载电流;调节驱动信号,以使负载电流等于目标电流,从而使超声换能器处于谐振状态。
31.本公开上述实施例的超声换能器的控制方法中,通过调节驱动信号使流经负载的负载电流等于目标电流,从而使超声换能器始终处于谐振状态。
32.本公开实施例中,流经负载电阻的动态支路的电流决定了超声刀刀头的振幅。为了达到精确的组织切割和良好的止血效果,需要控制振幅。为了控制振幅,需要实时控制流经该动态支路的电流。通过本公开的控制方法,可以在超声刀工作过程中,实时控制流经该动态支路的电流,使其等于目标电流,从而使超声换能器始终处于谐振状态,阻抗最低,机电转换效率最高。
33.下面通过具体的实施例对本公开进行说明。为了保持本公开实施例以下的说明清楚且简明,可省略已知功能和已知部件的详细说明。当本公开实施例的任一部件在一个以上的附图中出现时,该部件在每个附图中可以由相同的参考标号表示。
34.图2为本公开实施例的超声刀各部件的连接框图。本公开实施例提供一种手术设备,例如外科手术设备。该外科手术设备例如为超声刀。
35.如图2所示,本公开实施例的超声刀包括主机1、超声换能器2和超声刀头3。例如,主机1与超声换能器2连接,超声换能器2与超声刀头3连接。主机1例如包括控制装置10,其向超声换能器2提供驱动信号。在驱动信号的激励下,超声换能器2发生机械振动并且将该机械振动传递给超声刀头3。超声刀头3通过高频振动实现切割目标组织或止血的目的。
36.例如,在一个示例中,超声刀头3包括杆状组件,该杆状组件沿其延伸方向包括近端和远端。超声换能器2包括壳体,该壳体具有便于手持的手持部,所述壳体与杆状组件的近端连接。杆状组件的远端设置有端部执行器,该端部执行器可在打开或闭合状态之间切换,以执行切割目标组织的动作。有关超声刀头3的具体构造及其与超声换能器2的连接方式可参考现有设计,此处不再详细描述。
37.图3为本公开实施例的具有超声换能器的手术设备的等效电路。图4为本公开实施例的提供的超声换能器的控制方法的流程图。
38.如图3所示,在本公开实施例的手术设备中,超声换能器2的等效电路为虚线所示,
包括串联连接的动态电感l1、动态电容c1、动态电阻r1和负载电阻r,还包括静态电容c0,该静态电容c0与由动态电感l1、动态电容c1、动态电阻r1和负载电阻r组成的动态支路并联。在本公开实施例的超声刀中,无需设置如图1所示的匹配电感l0,简化了匹配电路的设计。
39.例如,驱动信号包括驱动电流i和驱动电压u。基于图3的等效电路,驱动电流i被分为两个支路电流i1和i2,其中,支路电流i1为流经负载电阻r的负载电流,支路电流i2为流经静态电容c0的电流。在超声刀切割目标组织过程中,由于目标组织的软硬度不同,导致负载电阻r发生变化。发明人发现,为了保证良好的切割或止血效果,需确保超声刀头3的振幅在预定范围内,而超声刀头3的振幅由流经负载电阻r的电流i1决定。
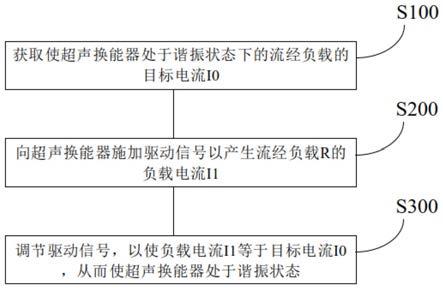
40.为此,如图3和图4所示,本公开实施例提供的超声换能器的控制方法,包括:s100:获取使超声换能器处于谐振状态下的流经负载的目标电流i0;s200:向超声换能器施加驱动信号以产生流经负载r的负载电流i1;s300:调节驱动信号,以使负载电流i1等于目标电流i0,从而使超声换能器处于谐振状态。
41.如前面所述,由于在不同超声换能器中静态电容c0存在较大离散性。同时由于电感绕制工艺所限,也存在较大离散性,每个超声华能器的谐振频率不同,同时,在切割目标组织时,负载阻抗的变化也会引起谐振频率的波动。上述控制方法中,通过调节驱动信号使流经负载的负载电流i1等于目标电流i0,从而使超声换能器2在切割目标组织的过程中始终处于谐振状态。
42.例如,目标电流i0为超声换能器2在生产厂家出厂时检测出的使超声换能器2的处于谐振状态下的电流。在一个示例中,目标电流i0的取值范围为125ma~400ma。
43.本公开实施例中,“a等于b”包含了a在b的预设范围内的情况。例如,负载电流i1等于目标电流i0 包含了负载电流i1 在目标电流i的预设范围内的情况。例如,当负载电流i1在目标电流i0的预设范围(例如
±
10%)内浮动时,都属于“负载电流i1等于目标电流i0”的范畴。也就是,负载电流i1可以大于等于目标电流i0乘以90%且小于等于目标电流i0乘以110%。进一步地,负载电流i1可以大于等于目标电流i0乘以95%且小于等于目标电流i0乘以105%,由此进一步提高对负载电流i1的控制精度。
44.同理,下文中提到的“驱动频率f等于目标频率f0”可以理解为:当驱动频率f在目标频率f0的预设范围(例如
±
10%)内浮动时,都属于“驱动频率f等于目标频率f0”的范畴。下文中提到的“相位角θ等于目标相位角θ0”可以理解为:当相位角θ在目标相位角θ0的预设范围(例如
±
10%)内浮动时,都属于“相位角θ等于目标相位角θ0”的范畴。
45.通常,驱动电流i和驱动电压u之间具有相位差值,该相位差值也称为相位角θ。在实际工作中,驱动信号例如为正弦波信号,该正弦波信号可被转成电压和电流的相位方波信号,进一步地,该相位方波信号可被转换为相位差方波信号。由此,可得到相位差值。
46.由于正弦波信号可反映出信号的频率,驱动信号还包括驱动频率f。该驱动频率f与相位角θ相关。当超声换能器2处于谐振频率下时,驱动频率f等于目标频率f0,即谐振频率,此时,对应的相位角θ称为目标相位角θ0。
47.图5为本公开实施例的控制方法中执行调节驱动信号步骤时的流程图。图6为本公开实施例的控制方法中执行调节驱动频率步骤时的流程图。
48.如图5所示,在步骤300的调节驱动信号时,控制方法包括:
s310:获取施加至超声换能器的驱动频率f;以及s320:通过调节驱动频率f以调节相位角θ,从而使负载电流i1等于目标电流i0。
49.进一步地,如图6所示,例如,在步骤200的调节驱动频率时,控制方法包括:s321:确定目标相位角θ0和与目标相位角θ0对应的目标频率f0;s322:调节驱动频率f,使调节后的驱动频率f等于目标频率f0,调节后的相位角θ等于目标相位角θ0。
50.发明人发现,在超声换能器2的工作过程中,驱动频率f决定了相位角θ,相位角θ进一步决定了驱动电流i在图3的两个支路中的分配,即负载电流i1和流经静态电容c0的电流i2之间的比例关系。因此,通过控制驱动频率f来调整相位角θ,可调整负载电流i1和电流i2之间的比例关系。
51.图7为本公开实施例的驱动电流和动态支路电流之间的关系示意图。如图3和图7所示,驱动电流i、负载电流i1和流经静态电容c0的电流i2满足以下三角函数关系:sinθ=i2/i,cosθ=i1/i。
52.当相位角θ调节到θ0时,可确定i2和i1之间的比例关系,此时,通过进一步调整驱动电流i的大小,即可调节负载电流i1的大小,使负载电流i1等于目标电流i0。
53.图8为本公开另一实施例的控制方法中执行调节驱动信号步骤时的流程图。如图8所示,在步骤300’的调节驱动信号时,所述控制方法包括:s330:获取施加至超声换能器的驱动电流i;以及s340:通过调节驱动电流i以调节负载电流i1,使负载电流i1等于目标电流i0。
54.本公开实施例中,调节驱动频率f的步骤s322与调节驱动电流i的步骤s340可以同时执行,也可以一个在先一个在后地执行,例如先调节驱动频率f,再调节驱动电流i,本公开实施例对此不做限定。
55.本公开实施例中,目标相位角θ0和目标驱动频率f0的获取方式可以有多种,以下提供了一种获取方式的示例。可以理解的是,只要能在切割目标组织的过程中获取到目标相位角θ0和目标驱动频率f0,都包含在本公开实施例的范围内。
56.图9为本公开实施例的控制方法中执行确定目标相位角步骤时的流程图。如图9所示,在确定目标相位角θ0时,所述控制方法包括:s3211:获取施加至超声换能器的驱动电压u和超声换能器的容抗xc;s3212:根据容抗xc和驱动电压u,确定流经静态电容c0的电流i2;s3213:根据流经静态电容的电流i2和目标电流i0,确定目标相位角θ0。
57.例如,步骤s3211中,根据以下公式(1)计算容抗xc:其中,w为角频率,c为静电电容c0的电容值,j为复数中虚数的符号。例如,w=2πf,f为频率。
58.例如,步骤s3212中,基于计算出的容抗xc和获取的驱动电压u,根据以下公式(2)计算流经静态电容c0的电流i2:
例如,步骤s3213中,参照图7所示的三角函数关系,基于计算出的电流i2和目标电流i0,根据以下公式(3)计算目标相位角θ0:至此,得到目标相位角θ0。
59.图10为本公开实施例的控制方法中执行确定目标频率步骤时的流程图。如图10所示,在确定目标频率f0时,所述控制方法包括:s3214:在预设频率范围内进行频率扫描;s3215:在频率扫描过程中,获取使超声换能器处于谐振状态下的频率作为目标频率f0。
60.本公开实施例中,当超声换能器处于谐振状态下时,即驱动频率f等于谐振频率f0时,超声换能器的阻抗最小,这样不仅有利于超声换能器达到最大工作效率,而且可延长超声换能器的使用寿命。
61.例如,在频率扫描过程中,获取超声换能器的阻抗,并且将阻抗最小点所对应的频率作为目标频率f0。在一个示例中,最小阻抗的取值范围为大于等于200欧姆。
62.本公开实施例中,预设频率范围为大于等于53.5千赫兹且小于等于57.5千赫兹;目标频率f0为大于等于53.5千赫兹且小于等于57.5千赫兹;目标相位角θ0为大于等于0
°
且小于等于90
°
。
63.本公开实施例中,在超声刀头3切割目标组织的过程中,重复上述本公开实施例提供的控制方法,即重复执行获取使超声换能器处于谐振状态下的流经负载的目标电流i0的步骤、向超声换能器施加驱动信号以产生流经负载r的负载电流i1的步骤、以及调节驱动信号以使负载电流i1等于目标电流i0的步骤,从而使超声换能器在工作过程中,始终保持处于谐振状态,直到目标组织切割完毕。
64.本公开实施例提供的控制方法中,由于能在切割目标组织的过程中,实时监测并且调节负载电流,使负载电流等于目标电流i0,从而使超声换能器2始终保持谐振状态。同时,与图1所示的等效电路相比,由于本技术的控制方法中无需考虑电感l0的大小,相对现有的控制方法,不仅减少了电路元器件的成本,也减小了因电感l0带来的计算误差,提高了对负载电流的控制精度。
65.图11为本公开实施例的超声换能器的控制装置的框图。如图11所示,本公开实施例还提供一种超声换能器的控制装置,该控制装置例如为图2中的控制装置10,包括:获取单元,配置为获取使超声换能器2处于谐振状态下的流经负载r的目标电流i0;驱动单元,配置为向超声换能器2施加驱动信号以产生流经负载r的负载电流i1;以及调节单元,配置为调节驱动信号,以使负载电流i1等于目标电流i0,从而使超声换能器2处于谐振状态。
66.本公开上述实施例的超声换能器的控制装置中,通过调节单元来调节驱动信号使流经负载的负载电流等于目标电流,从而使超声换能器始终处于谐振状态。
67.例如,该获取单元还配置为获取施加至超声换能器2的驱动电流i,该调节单元还
配置为通过调节驱动电流i以调节负载电流i1,使负载电流i1等于目标电流i0。
68.例如,该获取单元还配置为获取施加至超声换能器的驱动频率f,该调节单元还配置为通过调节驱动频率f以调节相位角θ,从而使负载电流i1等于目标电流i0。
69.进一步地,例如,该调节单元还配置为确定目标相位角θ0和与目标相位角θ0对应的目标频率f0,以及调节驱动频率f,使调节后的驱动频率f等于目标频率f0,并且调节后的相位角θ等于目标相位角θ0。有关目标相位角θ0和目标频率f0的具体确定方法可参见前面的描述,此处不再赘述。
70.本公开实施例的上述控制装置中,利用调节单元来调节驱动电流i以及调节驱动频率f,可快速地使负载电流等于目标电流,从而使超声换能器始终处于谐振状态。而且,由于本技术的控制装置中没有设置如图1所示的并联或串联的电感l0,相对现有的控制装置,不仅减少了电路元器件的成本,也减小了因电感l0带来的计算误差,从而提高了对负载电流的控制精度。
71.本公开实施例还提供一种手术设备,包括:处理器和存储器,其中存储器包括一个或多个计算机程序模块。该一个或多个计算机程序模块被存储在存储器中并被配置为由处理器执行,一个或多个计算机程序模块包括用于执行实现前面任一实施例提供的控制方法的指令。
72.本公开实施例还提供一种存储介质,用于非暂时性地存储计算机可读指令,当计算机可读指令由计算机执行时可实现前面任一实施例提供的控制方法。
73.本文中,有以下几点需要注意。
74.(1)本公开实施例附图只涉及到与本公开实施例涉及到的结构,其他结构可参考通常设计。
75.(2)在不冲突的情况下,本公开的实施例及实施例中的特征可以相互组合以得到新的实施例。
76.以上,仅为本公开的具体实施方式,但本公开的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本公开揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本公开的保护范围之内。因此,本公开的保护范围应以权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
