技术特征:
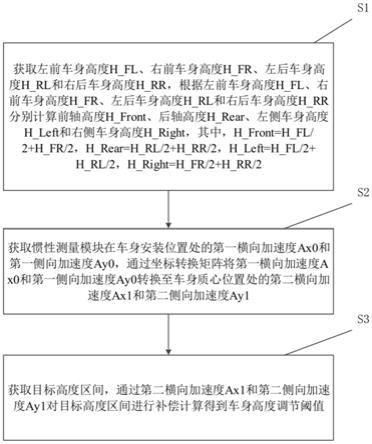
1.一种车身高度控制方法,其特征在于,包括以下步骤:s1、获取左前车身高度h_fl、右前车身高度h_fr、左后车身高度h_rl和右后车身高度h_rr,根据左前车身高度h_fl、右前车身高度h_fr、左后车身高度h_rl和右后车身高度h_rr分别计算前轴高度h_front、后轴高度h_rear、左侧车身高度h_left和右侧车身高度h_right,其中,h_front=h_fl/2 h_fr/2,h_rear=h_rl/2 h_rr/2,h_left=h_fl/2 h_rl/2,h_right=h_fr/2 h_rr/2;s2、获取惯性测量模块在车身安装位置处的第一横向加速度ax0和第一侧向加速度ay0,通过坐标转换矩阵将第一横向加速度ax0和第一侧向加速度ay0转换至车身质心位置处的第二横向加速度ax1和第二侧向加速度ay1;s3、获取目标高度区间,通过第二横向加速度ax1和第二侧向加速度ay1对目标高度区间进行补偿计算得到车身高度调节阈值。2.根据权利要求1所述的车身高度控制方法,其特征在于,当车辆侧向停放在斜坡时,第二侧向加速度ay1>0,当进行车高调节时,通过第二侧向加速度ay1对目标高度区间进行补偿计算,假设ay指向左侧为正向,y为车身轴向长度,则左侧高度调节阈值为h_left
△
h y/2*ay1/g
±
h0,右侧高度调节阈值为h_right
△
h-y/2*ay1/g
±
h0,其中,
△
h为车身高度调节目标值,g为重力加速度,h0为车身高度调节允许误差值。3.根据权利要求1所述的车身高度控制方法,其特征在于,当车辆正向停放在斜坡时,第二横向加速度ax1>0,当进行车高调节时,通过第二横向加速度ax1对目标高度区间进行补偿计算,假设ax指向前侧为正向,x为前后轴距离,则前轴高度调节阈值为h_front
△
h x/2*ax1/g
±
h0,后轴高度调节阈值为h_rear
△
h-x/2*ax1/g
±
h0,其中,
△
h为车身高度调节目标值,g为重力加速度,h0为车身高度调节允许误差值。4.根据权利要求1所述的车身高度控制方法,其特征在于,当车辆单轮停放在斜坡时,第二横向加速度ax1>0且第二侧向加速度ay1>0,当进行车高调节时,通过第二横向加速度ax1和第二侧向加速度ay1对目标高度区间进行补偿计算,假设ay指向左侧为正向,ax指向前侧为正向,y为车身轴向长度,x为前后轴距离,则左前车高调节目标阈值为h_fl
△
h y/2*ay/g x/2*ax/g
±
h0,右前车高调节目标阈值为h_fr
△
h-y/2*ay/g x/2*ax/g
±
h0,左后车高调节目标阈值为h_rl
△
h y/2*ay/g-x/2*ax/g
±
h0,右后车高调节目标阈值为h_rr
△
h-y/2*ay/g-x/2*ax/g
±
h0,其中,
△
h为车身高度调节目标值,g为重力加速度,h0为车身高度调节允许误差值。5.根据权利要求1所述的车身高度控制方法,其特征在于,当车辆停放在平地时,第二横向加速度ax1和第二侧向加速度ay1均为0,当进行车高调节时,沿垂向升降车身。6.根据权利要求1所述的车身高度控制方法,其特征在于,根据惯性测量模块在车身安装位置坐标(x0,y0)和车身质心位置坐标(x1,y1)计算得到坐标转换矩阵。7.根据权利要求1所述的车身高度控制方法,其特征在于,当进行车高调节时,根据车身高度调节阈值驱动车辆的空气悬架的各空气弹簧的气体分配阀进行充气或放气。8.一种车身高度控制系统,其特征在于,用于实现如权利要求1-7任一项所述的车身高度控制方法,包括:采集单元,包括左前车身高度获取模块、右前车身高度获取模块、左后车身高度获取模块、右后车身高度获取模块和惯性测量模块,所述左前车身高度获取模块用于获取左前车
身高度h_fl,所述右前车身高度获取模块用于获取右前车身高度h_fr,所述左后车身高度获取模块用于获取左后车身高度h_rl,所述右后车身高度获取模块用于获取右后车身高度h_rr,所述惯性测量模块用于获取惯性测量模块在车身安装位置处的第一横向加速度ax0和第一侧向加速度ay0;计算单元,包括车身高度计算模块、车身姿态计算模块、目标高度区间获取模块和目标高度区间补偿计算模块,所述车身高度计算模块用于根据左前车身高度h_fl、右前车身高度h_fr、左后车身高度h_rl和右后车身高度h_rr分别计算前轴高度h_front、后轴高度h_rear、左侧车身高度h_left和右侧车身高度h_right,所述车身姿态计算模块用于通过坐标转换矩阵将第一横向加速度ax0和第一侧向加速度ay0转换至车身质心位置处的第二横向加速度ax1和第二侧向加速度ay1,所述目标高度区间获取模块用于获取目标高度区间,所述目标高度区间补偿计算模块用于通过第二横向加速度ax1和第二侧向加速度ay1对目标高度区间进行补偿计算得到车身高度调节阈值;驱动单元,包括左前车身高度驱动模块、右前车身高度驱动模块、左后车身高度驱动模块和右后车身高度驱动模块,所述左前车身高度驱动模块用于根据车身高度调节阈值驱动左前空气弹簧阀门,所述右前车身高度驱动模块用于根据车身高度调节阈值驱动右前空气弹簧阀门,所述左后车身高度驱动模块用于根据车身高度调节阈值驱动左后空气弹簧阀门,所述右后车身高度驱动模块用于根据车身高度调节阈值驱动右后空气弹簧阀门。9.一种车辆,其特征在于,所述车辆包括:一个或多个处理器;存储装置,用于存储一个或多个程序;当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现如权利要求1-7任一项所述的车身高度控制方法。10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1-7任一项所述的车身高度控制方法。
技术总结
本发明公开一种车身高度控制方法、系统、车辆及存储介质,属于车辆领域。分别计算前轴高度、后轴高度、左侧车身高度和右侧车身高度,获取惯性测量模块在车身安装位置处的第一横向加速度Ax0和第一侧向加速度Ay0,通过坐标转换矩阵将第一横向加速度Ax0和第一侧向加速度Ay0转换至车身质心位置处的第二横向加速度Ax1和第二侧向加速度Ay1,通过第二横向加速度Ax1和第二侧向加速度Ay1对目标高度区间进行补偿计算得到车身高度调节阈值,将车身高度调节阈值合理分配至车辆各个空气弹簧,提高了车身高度调节时的车辆稳定性,提升了驾驶员的驾驶体验,保证了驾驶员和乘客的安全性。保证了驾驶员和乘客的安全性。保证了驾驶员和乘客的安全性。
技术研发人员:赵超群 张建 王彦维
受保护的技术使用者:中国第一汽车股份有限公司
技术研发日:2022.01.30
技术公布日:2022/4/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。