技术特征:
1.一种机器人系统,包括机器人及与所述机器人关联的指示设备,所述机器人包括存储器及处理器,所述存储器中存储有可在所述处理器上运行的计算机可读指令,其特征在于,处理器执行所述计算机可读指令时实现如下步骤:获取所述机器人的前方路径信息;生成与所述前方路径信息匹配的行进策略,所述行进策略包括所述机器人的行进方向和/或行进速度;根据所述行进策略生成所述指示设备的指示控制指令;将所述指示控制指令发送至所述指示设备,以使所述指示设备根据所述指示控制指令发出用于指示所述行进方向的指示信号,所述指示控制指令用于设置所述指示信号的指示参数。2.如权利要求1所述的机器人系统,其特征在于,所述生成与所述前方路径信息匹配的行进策略,所述行进策略包括所述机器人的行进方向和/或行进速度,包括:所述前方路径信息包括和所述机器人相向而行的行人和所述机器人的待移动路面的第一路宽;判断所述第一路宽是否允许所述行人与所述机器人同时通过所述待移动路面,若所述第一路宽允许所述行人与所述机器人同时通过所述待移动路面,则生成靠边行驶的行进策略。3.如权利要求2所述的机器人系统,其特征在于,所述若所述第一路宽允许所述行人与所述机器人同时通过所述待移动路面,则生成靠边行驶的行进策略,包括:若所述行人处于左侧路面,则生成靠右行驶的行进策略;若所述行人处于右侧路面,则生成靠左行驶的行进策略。4.如权利要求2所述的机器人系统,其特征在于,所述判断所述第一路宽是否允许所述行人与所述机器人同时通过所述待移动路面之后,包括:若所述第一路宽不允许所述行人与所述机器人同时通过所述待移动路面,则获取机器人当前所处路面的第二路宽;判断所述第二路宽是否允许所述行人与所述机器人同时通过所述当前所处路面;若所述第二路宽允许所述行人与所述机器人同时通过所述当前所处路面,则生成靠边等待的行进策略。5.如权利要求4所述的机器人系统,其特征在于,所述判断所述第二路宽是否允许所述行人与所述机器人同时通过所述当前所处路面之后,还包括:若所述第二路宽不允许所述行人与所述机器人同时通过所述当前所处路面,则查找与所述当前所处路面临近的后方避让点;生成用于控制机器人向所述后方避让点移动的行进策略。6.如权利要求1所述的机器人系统,其特征在于,所述生成与所述前方路径信息匹配的行进策略,所述行进策略包括所述机器人的行进方向和/或行进速度,包括:若所述前方路径信息包括与所述机器人同向而行的行人,则获取所述行人的行走速度;根据所述行走速度确定所述机器人的所述行进速度。7.如权利要求1所述的机器人系统,其特征在于,所述根据所述行进策略生成所述指示
设备的指示控制指令,包括:获取与所述行进策略关联的环境信息;根据所述环境信息设置所述指示参数。8.一种机器人交互方法,其特征在于,包括:获取机器人的前方路径信息;生成与所述前方路径信息匹配的行进策略,所述行进策略包括所述机器人的行进方向和/或行进速度;根据所述行进策略生成与所述机器人关联的指示设备的指示控制指令;将所述指示控制指令发送至所述指示设备,以使所述指示设备根据所述指示控制指令发出用于指示所述行进方向的指示信号,所述指示控制指令用于设置所述指示信号的指示参数。9.一种计算机设备,包括存储器、处理器,所述存储器中存储有可在所述处理器上运行的计算机可读指令,其特征在于,所述处理器用于执行所述计算机可读指令时实现如权利要求1-7中任一项所述机器人系统实现的步骤。10.一个或多个存储有计算机可读指令的可读存储介质,所述计算机可读指令被一个或多个处理器执行时,使得所述一个或多个处理器执行如权利要求1-7中任一项所述机器人系统实现的步骤。
技术总结
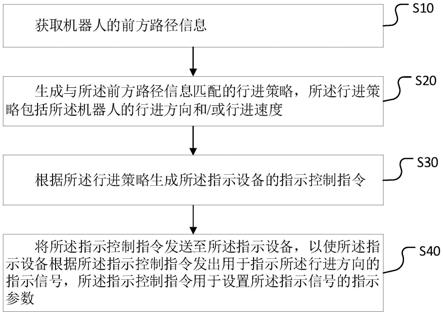
本发明涉及机器人导航领域,公开了一种机器人系统、方法、计算机设备及存储介质,处理器执行计算机可读指令时实现如下步骤:获取机器人的前方路径信息;生成与所述前方路径信息匹配的行进策略,所述行进策略包括所述机器人的行进方向和/或行进速度;根据所述行进策略生成所述指示设备的指示控制指令;将所述指示控制指令发送至所述指示设备,以使所述指示设备根据所述指示控制指令发出用于指示所述行进方向的指示信号,所述指示控制指令用于设置所述指示信号的指示参数。本发明可以根据前方路径信息选取机器人恰当的行进策略,同时产生与行进策略匹配的,且更容易被行人觉察的指示信号,使机器人在运动时与人产生更好的交互,减少人机冲突。少人机冲突。少人机冲突。
技术研发人员:吴翔 杨璐雅
受保护的技术使用者:深圳市普渡科技有限公司
技术研发日:2021.11.16
技术公布日:2022/4/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。