技术特征:
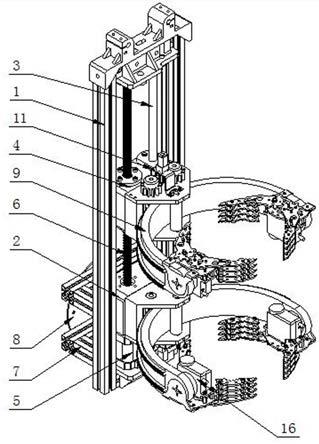
1.一种用于条板墙的砌墙机器人的机械手,其包括架体,其特征在于:所述架体的内壁设置有固定座和活动座,所述固定座和活动座的内壁均滑动连接有支臂,所述支臂的每一端均通过卡座与销轴配合活动连接有两个夹片,所述卡座的表面固定连接有控制盒,所述控制盒的内壁通过轴承活动连接有驱动轴,所述驱动轴的底端与对应夹片的上表面固定连接,所述控制盒内壁的上表面固定连接有第三电机,所述第三电机的输出轴固定连接有主动齿轮;所述主动齿轮与从动齿轮相啮合,所述从动齿轮的下表面固定连接有同轴齿轮,所述从动齿轮的两端通过轴承卡接在控制盒的内壁,所述同轴齿轮与驱动齿轮相啮合,所述驱动轴的表面套接有调压齿轮和离合片,所述离合片的表面固定连接有磁吸架,所述调压齿轮的表面啮合有齿板,所述齿板的上表面通过压板与液压杆的一端固定连接,所述齿板的表面固定连接有定位杆,所述定位杆的表面通过滑套卡接在控制盒的内壁。2.如权利要求1所述的用于条板墙的砌墙机器人的机械手,其特征在于:所述夹片的表面通过螺栓固定连接有若干个夹件,对应两个夹件之间相啮合,所述驱动齿轮的内壁卡接在驱动轴的表面。3.如权利要求1所述的用于条板墙的砌墙机器人的机械手,其特征在于:所述磁吸架内壁的上表面与调压齿轮的上表面搭接,所述调压齿轮的下表面与离合片的下表面均搭接有卡接于驱动轴表面的限位环,所述驱动轴的表面开设有导向槽,所述离合片的内壁通过凸块滑动连接在导向槽的内壁。4.如权利要求1所述的用于条板墙的砌墙机器人的机械手,其特征在于:所述离合片的上表面与调压齿轮下表面的形状相契合,所述控制盒内壁的上表面固定连接有电磁铁,所述电磁铁位于磁吸架的上方。5.如权利要求1所述的用于条板墙的砌墙机器人的机械手,其特征在于:所述架体的左侧面焊接有加强座,所述加强座的左侧面固定连接有连接板,所述固定座的表面固定连接在架体的内壁。6.如权利要求1所述的用于条板墙的砌墙机器人的机械手,其特征在于:所述活动座的上表面通过机架固定安装有第二电机,所述第二电机的输出轴固定连接有第一齿轮,所述第一齿轮与两个第二齿轮的表面相啮合,两个第二齿轮的下表面均固定连接有表面开设有两个啮合齿槽的辊筒,辊筒表面设有啮合齿槽,啮合齿槽能够与支臂外侧面开设的齿条啮合。7.如权利要求1所述的用于条板墙的砌墙机器人的机械手,其特征在于:所述架体内壁的下表面固定连接有第一电机,所述第一电机的输出轴固定连接有螺纹杆,所述螺纹杆的另一端通过轴承卡接在架体内壁的上表面,所述螺纹杆的表面与活动座内壁卡接的螺纹套螺纹连接,所述架体的内壁固定连接有滑杆,所述滑杆与螺纹杆均贯穿设置于固定座表面的通孔内。8.如权利要求1所述的用于条板墙的砌墙机器人的机械手,其特征在于:所述液压杆的表面固定连接在控制盒的内壁,所述齿板与定位杆的表面滑动连接在控制盒内壁开设的滑孔内。
技术总结
本发明涉及一种用于条板墙的砌墙机器人的机械手,其包括架体,所述架体的内壁设置有固定座和活动座,所述固定座和活动座的内壁均滑动连接有支臂,所述支臂的每一端均通过卡座与销轴配合活动连接有两个夹片。本发明的有益效果是:通过第三电机驱动驱动轴转动时两个相互啮合的夹片带动夹件将条板墙夹持,随即电磁铁启动,使调压齿轮通过离合片与驱动轴开始联动,液压杆开始运作,使与齿板啮合的调压齿轮开始小幅度的转动。这种方式能够实现针对不同厚度条板墙的快速适应,以及夹持过程中小幅度的夹持力度调节更为稳定,夹持力有保障,能有效防止夹持力过大或过小的情况出现,夹持力的控制精度在配合下得到提高。控制精度在配合下得到提高。控制精度在配合下得到提高。
技术研发人员:马文文
受保护的技术使用者:北京锦尚盈华装饰设计有限公司
技术研发日:2022.03.11
技术公布日:2022/4/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。