1.本发明属于电磁计算技术领域,具体涉及一种基于人工神经网络的周期目标电磁散射特性快速仿真方法。
背景技术:
2.近年来,在相控阵雷达天线、频率选择表面以及超材料中,周期结构都有着十分广泛的应用。随着技术的发展,周期结构的规模变得越来越大,为了考虑有限周期结构的边际效应,利用全波数值计算方法会产生较大的计算负担。实现针对大规模有限周期阵列的快速仿真是十分有必要的。
3.子全域基函数方法利用周期结构中的物理特征,将主要耦合作用考虑于一个3
×
3小阵列之中,通过求解这个小阵列,提取出三大类九小类子全域基函数,这样阵列中每个单元只有一个基函数,大大缩减了未知量,提高了对周期结构目标的求解效率。然而,这种方法在建立缩减矩阵方程时,计算复杂度和传统的全波分析方法的复杂度是相同的,所以当周期结构规模变大时,仍然较为耗时。此外,当阵列参数一旦发生变化时,子全域基函数方法需重新计算,这对大规模有限周期结构的快速仿真是不利的。
4.综上,现有的子全域基函数方法依然需要进一步改善与加速。
技术实现要素:
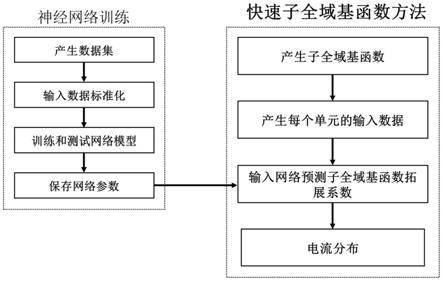
5.发明目的:为了克服现有技术的不足,本发明提供了一种周期目标电磁散射特性快速仿真方法,通过计算有限个周期阵列,从而可以快速预估新阵列结构的电磁散射特性,进一步提高子全域基函数方法的计算效率。
6.技术方案:为实现上述发明目的,本发明的一种周期目标电磁散射特性快速仿真方法,包括以下步骤:
7.步骤1、基于传统子全域基函数方法生成数据集:构建一系列不同单元间距、不同规模的周期阵列结构,基于传统子全域基函数方法计算得到每个单元上子全域基函数的拓展系数,将单元以及单元所处的阵列信息作为数据集的输入,将子全域基函数的拓展系数作为数据集的标签;
8.步骤2、基于反向传播构建人工神经网络模型;
9.步骤3、对数据集进行分类,并训练人工神经网络模型:将数据集分为中心单元、角单元以及棱边单元三类,分别训练出三套人工神经网络参数;
10.步骤4、对待预测的周期阵列结构目标,首先提取3
×
3子阵列计算得到子全域基函数,然后每个单元产生相对应的网络输入参数,再利用已训练好的人工神经网络模型对各单元的子全域基函数拓展系数进行预测,最后得到整个周期阵列结构目标的电磁感应表面电流分布。
11.其中,
12.步骤1所述基于传统子全域基函数方法生成数据集,包括以下步骤:
13.步骤1.1、建立数据集的周期阵列结构单元拓展方向 x轴方向与 y轴方向,沿 x轴方向与 y轴方向的单元数范围为6到50,步长为1,即[6,7,
…
,50];每个阵列的周期设置为0.6到1.2个波长,步长为0.1个波长,即[0.6,0.7,
…
,1.2];
[0014]
步骤1.2、将每个单元在阵列中的中心位置坐标(xi,yi)、阵列中单元间的中心间距(d
x
,dy)以及阵列规模(n
x
,ny)作为每个样本的输入,通过组合得到该单元对应的网络输入参数(xi,yi,d
x
,dy,n
x
,ny),各单元的网络输入参数组成输入数据集;
[0015]
步骤1.3、输入数据集标准化:应用z-score标准化方法对输入数据集矩阵的每一列进行标准化预处理,经过z-core标准化预处理后,数据会被压缩至-1到1之间;
[0016]
步骤1.4、利用传统子全域基函数方法对周期阵列结构进行计算,得到各单元的子全域基函数拓展系数,并将拓展系数拆分为幅度部分和相位部分作为输入数据集的对应标签。
[0017]
所述z-score标准化方法的公式如下:
[0018][0019]
其中,μ、σ为数据的平均值和标准差,a代表数据的原始值,a'代表数据标准化后的值。
[0020]
步骤2所述人工神经网络模型由一个输入层和三个隐含层共四层组成,层与层之间采用全连接的形式;第一层隐含层采用relu作为激活函数,第二层隐含层采用tanh作为激活函数,第三层隐含层采用relu作为激活函数。
[0021]
所述输入层由6个神经元组成,所述三个隐含层分别由32、28、20神经元组成。
[0022]
所述人工神经网络模型采用adam优化器作为模型的优化器,使用均方损失函数计算损失值,学习率为0.01。
[0023]
步骤3所述对数据集进行分类,并训练人工神经网络模型,包括以下步骤:
[0024]
步骤3.1、将周期阵列结构的数据集分为中心单元、角单元以及棱边单元三类:将除最外层单元外的内部单元归类为中心单元的数据集,将四个角落处3
×
3的阵列归类为角单元的数据集,将外围三层单元归类为棱边单元的数据集;
[0025]
步骤3.2、在数据集中随机抽取20%的样本作为验证集,然后将剩下的作为训练集并做随机乱序处理来保证训练出的模型具有一定的泛化性能;
[0026]
步骤3.3、针对数据集的中心单元、角单元以及棱边单元分别进行人工神经网络模型训练,得出相对应的三套人工神经网络参数。
[0027]
步骤3.3所述进行人工神经网络模型训练的过程为:通过数据生成器,每一次生成训练集中的若干数据放入到人工神经网络模型中进行训练,把所有训练集数据训练一次作为一轮,得到训练集的损失值,然后把验证集的数据放入到人工神经网络模型进行测试并得到验证集的损失值;通过反向传播,不断调整网络参数,使训练集和验证集的损失值同时达到设定的阈值范围,然后生成训练好的人工神经网络模型并保存。
[0028]
所述步骤4具体包括以下步骤:
[0029]
步骤4.1、待预测周期阵列的规模为n=n
x
×
ny,提取3
×
3子阵列进行分析,得到九类子全域基函数
[0030]
步骤4.2、针对需要被预测的周期阵列结构目标,阵列中每个单元都产生相对应的
网络输入参数,并利用步骤1.3的z-score标准化时用的平均值μ和标准差σ进行标准化处理,得到标准化预处理后的网络输入参数;
[0031]
步骤4.3、将每个单元标准化预处理后的网络输入参数,输入到已训练好的人工神经网络模型中,预测出对应的子全域基函数的拓展系数αi,i的取值范围为1,2
…
n;
[0032]
步骤4.4、根据下式得到待预测周期阵列的电磁散射感应电流分布为:
[0033][0034][0035]
其中,r为周期阵列上观察点的位置矢量,j
tot
(r)为阵列的总电流系数分布;mi是单元的位置,根据子全域基函数方法中单元的分类对应着1,2,
…
,9;是mi位置处单元的子全域sed基函数,k为每个单元的rwg基函数的数目,为单元上的第l个rwg基函数,表示场点;为3
×
3子阵列上的rwg基函数系数向量i
sed
中第mi行l列元素。
[0036]
步骤4.1所述提取3
×
3子阵列进行分析,得到九类子全域基函数具体过程为:
[0037]
基于rwg基函数、电场积分方程以及伽辽金测试得到矩阵方程:
[0038]zsedised
=v
sed
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0039]
其中,z
sed
为阻抗矩阵,i
sed
为3
×
3子阵列上的rwg基函数系数向量,v
sed
为3
×
3子阵列的电压向量;
[0040]
阻抗矩阵z
sed
中第m行n列元素为:
[0041][0042]
其中,分别表示场点与源点,分别为场点和源点处的rwg基函数,j为虚部单位,k为自由空间内的波常数,η为自由空间波阻抗,为自由空间的格林函数,其表达式为:
[0043][0044]
通过求解式(4)、(5)和(6),得到:
[0045][0046]
式中,表示九类子全域基函数,其中有四种角单元、四种棱边单元与
一种中心单元。
[0047]
有益效果:与现有技术相比,本发明具有以下有益效果:
[0048]
本发明主要通过人工神经网络学习全域基函数在周期结构上的分布,从而可以对新的阵列结构进行快速仿真,通过计算有限个周期结构,训练人工神经网络模型,可预测其他规模周期结构;通过人工神经网络,可以以极高的效率快速预测出子全域基函数的拓展系数,效率高。
附图说明
[0049]
图1本发明的实施流程图;
[0050]
图2是构建数据集阵列示意图;
[0051]
图3是输入参数格式示意图;
[0052]
图4人工神经网络模型示意图;
[0053]
图5构建数据集阵列单元分类示意图;
[0054]
图6是40
×
40方形周期结构示意图;
[0055]
图7是用矩量法、传统子全域基函数与本发明方法计算实施例周期结构在300mhz频率下的平面波正入射的双站雷达散射截面对比图;
[0056]
图8是用矩量法、传统子全域基函数与本发明方法计算100
×
100方形周期结构在300mhz频率下的平面波正入射的双站雷达散射截面对比图。
具体实施方式
[0057]
为了进一步说明本发明方法的实施过程,下面结合附图并举实施例进行描述。
[0058]
本发明的一种周期目标电磁散射特性快速仿真方法,如图1所示,包括以下步骤:
[0059]
步骤1、基于传统子全域基函数方法生成数据集:构建一系列不同单元间距、不同规模的周期阵列结构,基于传统子全域基函数方法计算计算得到每一个单元上子全域基函数的拓展系数,将单元以及单元所处的阵列信息作为数据集的输入,将子全域基函数的拓展系数作为数据集的标签。具体步骤包括:
[0060]
步骤1.1、设建立数据集的阵列单元拓展方向为 x轴方向与 y轴方向。沿 x轴方向与 y轴方向的范围为6到30,步长为1,即[6,7,
…
,50]。每个阵列的周期设置为0.6到1.2波长,步长为0.1个波长,即[0.6,0.7,
…
,1.2]。通过设置,可以得到315个阵列。
[0061]
步骤1.2、如图2所示,基于每个单元在阵列中的位置参数(xi,yi)、阵列中单元之间的间距(d
x
,dy)以及阵列规模(n
x
,ny)作为每个样本的输入;如图3所示,通过组合可以得到该单元对应的网络输入参数(xi,yi,d
x
,dy,n
x
,ny)。
[0062]
步骤1.3、由于不同类型的参数值之间存在较大的跨度,会导致人工神经网络模型训练时的难以收敛。在这里,应用z-core标准化方法对输入数据集矩阵的每一列即每一类参数进行预处理。z-core标准化的公式如下:
[0063][0064]
其中,μ、σ分别代表数据的平均值和标准差,a代表数据的原始值,a'代表数据的标准化后的值。
[0065]
经过z-core标准化后,数据会被压缩至-1到1之间,更有利于人工神经网络模型的训练。
[0066]
步骤1.4、利用子全域基函数方法,计算每个单元上的子全域基函数拓展系数作为对应的输出(输入对应的标签),由于拓展系数为复数,而神经网络只能处理实数,所以拓展系数被拆分为幅值与相位作为输出,即
[0067]
步骤2、基于反向传播构建人工神经网络模型:
[0068]
人工神经网络模型由一个输入层和三个隐含层共四层组成,层与层之间采用全连接的形式;如图4所示,基于反向传播,建立包含3个隐含层的人工神经网络模型,第一层隐含层采用relu作为激活函数,第二层隐含层采用tanh作为激活函数,第三层隐含层采用relu作为激活函数;输入层有6个神经元,隐含层由32 28 20神经元组成。
[0069]
在计算损失值时采用均方损失函数,并采用adam优化器作为人工神经网络模型的优化器,学习率设置为0.01,训练轮数为10000次。
[0070]
步骤3、对数据集进行分类,并训练人工神经网络模型:将训练数据集分为中心单元、角单元以及棱边单元三类,分别训练出三套人工神经网络参数,具体包括以下步骤:
[0071]
步骤3.1、将周期阵列结构数据集分为中心单元、角单元以及棱边单元三类:如图5所示,将除最外层单元外的内部单元归类为中心单元的训练集,将四个角落处3
×
3的小阵列归类为角单元的训练集,将外围三层单元归类为棱边单元的训练集。
[0072]
步骤3.2、在预处理过的数据集中随机抽取20%的样本作为验证集,然后将剩下的作为训练集并做随机乱序处理来保证训练出的模型具有一定的泛化性能;
[0073]
步骤3.3、针对周期阵列结构的中心单元、角单元以及棱边单元分别进行人工神经网络模型训练,得出相对应的三套人工神经网络参数:通过数据生成器,每一次生成训练集中的若干数据放入到人工神经网络模型中进行训练,把所有训练集数据训练一次作为一轮,得到训练集的损失值,然后把验证集的数据放入到模型进行测试并得到验证集的损失值。把预处理过的验证集数据输入到训练好的模型中,得到预测的数据,再与验证集真实的输出值进行对比,来判断模型的泛化性能。通过反向传播,不断调整优化网络参数,使训练集和验证集的损失值同时达到比较低的范围,然后生成训练好的人工神经网络模型并保存。
[0074]
步骤4、利用训练好的人工神经网络模型预测周期阵列结构目标的子全域基函数拓展系数,并完成电磁散射感应电流分布计算,具体包括以下步骤:
[0075]
步骤4.1、待预测周期阵列的规模为n=n
x
×
ny,提取3
×
3小阵列进行分析,基于rwg(rao-wilton-glisson)基函数、电场积分方程以及伽辽金测试得到矩阵方程:
[0076]zsedised
=v
sed
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0077]
其中,z
sed
为阻抗矩阵,i
sed
为3
×
3子阵列上的rwg基函数系数向量,v
sed
为3
×
3子阵列的电压向量;
[0078]
阻抗矩阵z
sed
中的第m行第n列元素为:
[0079]
[0080]
其中,分别表示场点与源点,分别为场点和源点处的rwg基函数,j为虚部单位,k为自由空间内的波常数,η为自由空间波阻抗,为自由空间的格林函数,其表达式为:
[0081][0082]
通过求解上面的矩阵方程,可以得到:
[0083][0084]
式中,对应着九类子全域基函数,其中有四种角单元、四种棱边单元与一种中心单元。
[0085]
步骤4.2、针对需要被预测的阵列,阵列中每一个单元都产生相对应的网络输入参数,并利用步骤1.3中数据集z-core标准化时用的平均值μ和标准差σ对新产生的输入参数进行预处理标准化。
[0086]
步骤4.3、将每一个单元预处理过的网络输入参数,输入到训练好的人工神经网络模型中,人工神经网络模型会根据输入参数,确定待预测单元在阵列中的位置,自适应切换对应单元种类的网络参数,并预测出对应的子全域基函数的拓展系数αi,i的取值范围为1,2
…
n。最后,可以得到整个阵列的电磁散射感应电流分布:
[0087][0088][0089]
其中,j
tot
(r)为阵列的总电流系数分布,r为周期阵列上观察点的位置矢量;mi是单元的位置,根据子全域基函数方法中单元的分类,对应着1,2,...,9;是mi位置处单元的sed(子全域)基函数,其计算方法如(3)式所示。k为每个单元的rwg基函数的数目,为单元上的第l个rwg基函数;为3
×
3子阵列上的rwg基函数系数向量i
sed
中第mi行l列元素。
[0090]
然后根据电流与雷达散射截面(radar cross section,rcs)τ的关系,计算得到阵列的雷达散射截面:
[0091][0092]
其中,e
sca
为散射场,和为场点与源点,r为场点到源点的距离,ω是角速度,μ0为空气中磁导率。
[0093]
为了验证本发明的准确性与高效性,下面以方形单元阵列结构分析为例,该例在主频为2.8ghz,内存为32gb,显卡为gtx1060,显存6gb的个人计算机上运行完成。
[0094]
如图6所示,一个40
×
40的方形单元周期阵列,求解频率为300mhz,波长λ为1米,单元边长为0.5λ,单元中心间距d
x
=dy=0.9λ。入射平面波为极化方向为-x轴,幅度为1v,传播方向为 z轴到-z轴。
[0095]
图7给出了传统子全域基函数方法和本发明方法计算得到的实施例的雷达散射截面分布图,可以看出两者的吻合度很高。
[0096]
图8给出了阵列规模扩大为100
×
100,单元中心间距为0.7λ的雷达散射截面分布图对比,计算方法分别为矩量法和本发明方法。可以看出,两者保持了很高的吻合度,证明了本发明方法的准确性。
[0097]
表1给出了矩量法、传统子全域基函数方法和本发明方法计算实施例所需的时间消耗,可以看出,本发明方法相比较于传统方法时间消耗非常少,进而证明了本发明方法的高效性。
[0098]
表1.矩量法、传统子全域基函数方法和本发明方法计算实施例所需的时间消耗
[0099][0100]
以上内容显示了本发明的基本原理、主要特征和本发明的优势。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是本发明的原理,在不脱离本发明精神和范围的前提下本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明的范围内。本发明要求的保护范围由所附的权利要求书及其等同物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。